

ステートマシンに基づいたチャットボット設計の経験の概要

インテリジェントロボットプロジェクトのニーズと改善の方向性をより深く理解するために、多くの場合、いくつかのツールを開発する必要があります。私が関わったいくつかのロボットプロジェクトのうち、ほとんどは製品要件を満たすことに成功しています。これらの実践を通じて、私たちは進歩と改善を続けたいのであれば、既存のロボット定義言語を大幅に改善する必要があることを深く認識しました。
- 複雑な会話フローを必要とするボットの作成プロセスを簡素化します。
- 過去に定義されたモジュールと会話パスを再利用してボットを作成することで、再利用性を最大限に高める
従来の実践では、インテント定義が混在しているため、これを実現するのは簡単ではありません。部分的な順序の制約により、会話パスの自由が制限されます。これは、ほとんどの質問が自己完結型で常に利用可能な「オープン」ボット (FAQ スタイルのボットに一般的) を処理するのに十分です。しかし、より「クローズド」なボットの場合、潜在的な会話の制限がはるかに大きくなります (オンラインからチケットを注文するボットの場合など)。
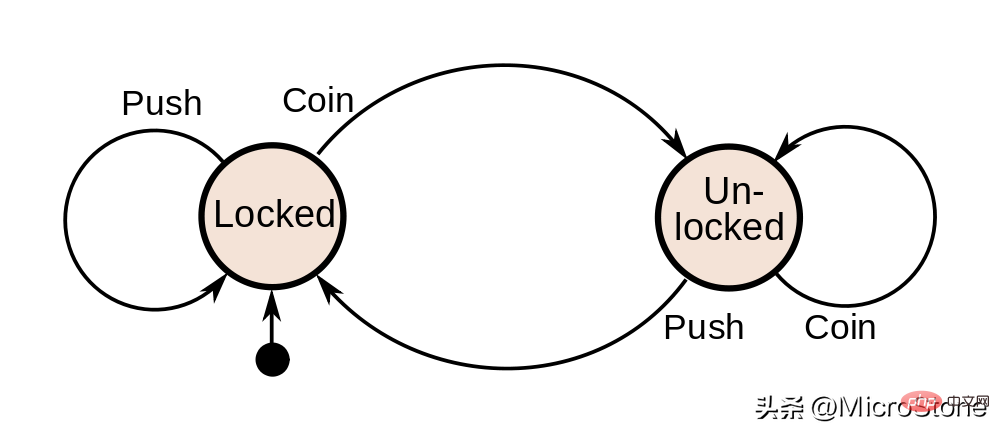
チャットボット定義言語の機能を新しいレベルに引き上げるために、いくつかのプロジェクトでは、ステート マシンのセマンティクスに近く、意図を完全に定義する DSL を導入しました。固定小数点の利用可能なインテンションを実行するようにロボットを制御する変換ルールから分離すると、これには次の利点があります。
- 設定された対話パスが異なっていても、以前のインテンションを新しいロボットで再利用できます。 。
- ステート マシンを使用して複雑な会話フローを定義できるため、ボットは明確で正確なセマンティクスを維持できます。
- 複雑なステート ガードを作成して遷移を制御できます。ユーザー入力、今後のイベントと以前のデータ、会話パラメータなどに基づいてボットを新しい状態に移行します。
- 状態ボディは、ユーザーのリクエストに応じて複雑な会話ロジックを保存するために使用できます。
- ロボットをモジュール化して、ステート マシンの一部を他のロボットで再利用できます。
- ローカル フォールバックは、ステートフルな動作の一部として定義できます。デフォルトのグローバル フォールバックに加えて、ローカル フォールバックを状態に関連付けて、状態のコンテキストでエラーを処理することもできます。たとえば、会話の特定の状態でボットからの質問にユーザーが答えるのに役立つメッセージを表示します。
インテント定義言語
インテント定義は実行部分から切り離されましたが、依然として別個のサブ言語です。ロボットがユーザーの発話の意図を認識し、そこから必要なパラメータを抽出できるように、意図ごとにいくつかのトレーニング文を提供するだけで済みます。
例として、挨拶と名前の述べという 2 種類のユーザー発話のみを理解する単純なボットがあります。発話タイプごとにいくつかの例文を提供し、ロボットにそれらを認識する方法を学習させることができます。ユーザーが発話を入力すると、ロボットはその意図に基づいて対応するアクションを実行し、そこから必要なパラメータを抽出します。
intent Hello {
inputs {
"你好"
"早上好"
}
}
intent MyNameIs {
inputs {
"我的名字叫小明"
"我是小明"
"你可以叫我小明"
}
creates context Greetings {
set parameter name from fragment "小明" (entity any)
}
}ロボットの認識方法を訓練するために、各インテントのサンプル文をいくつか提供します。さらに、場合によっては、将来的にユーザーにさらに個人的に対応できるように、コンテキスト内のパラメーター (ユーザー名など) も収集します。
ボットが最初にどのインテントとの照合を試行するかは指定されていません。これは実行言語の一部です。このアプローチにより、これらのインテントを再利用できます (たとえば、別のボットでは、挨拶インテントの直後ではなく、ユーザーに名前を尋ねる必要がある場合があります)。
実行定義言語
実行ファイルを使用して、ロボットがインテント/イベントにどのように応答し、遷移できるかを記述するステート マシンを定義します。これにより、ボット設計者は実行ファイルを表示して、会話全体のフローを理解できるようになります。
実行言語の各状態には 3 つの部分が含まれます
- 本文 (オプション): 状態に入るときにロボットが実行する反応。
- Next (必須): condition –> State として表現される、アウトバウンド変換を定義します。 イベント/インテントを受信すると、条件が評価され、遷移が満たされた場合、実行エンジンは指定された状態に移行し、対応する反応を実行します。 変換条件は非常に複雑になる可能性があることに注意してください。 これらは真のガードです。つまり、条件全体が true でない場合、遷移はナビゲートできず、エンジンは現在の状態のままになります。
- Fallback (オプション): このセクションには任意のコード (Body セクションと同様) を含めることができ、エンジンがこれらのコードのナビゲート可能な遷移を見つけられない場合に実行されます。 。
実行モデルには 2 つの特別な状態も含まれています:
- Init:是创建用户会话时进入的常规状态。它可以包含 Body、_Next_和 Fallback 部分。
- Default_Fallback:它只能包含 Body 部分,并且不能作为转换的目标状态。该状态表示在当前状态中未定义本地回退时执行的默认回退代码。该状态可用于打印通用错误消息(例如,“抱歉,我没明白您的意思”),而本地回退则可以打印针对当前状态的定制消息(例如,“请回答是或否”)。
最后,一个状态可以定义一个单一的通配符转换(使用保留字符___作为转换条件),当计算状态主体时将自动导航。这使我们能够在多个地方重用相同的代码并模块化执行逻辑。下面是一个简单的机器人示例,它只回复问候意图,询问用户名并向用户问好。这个机器人的回复可以通过我们基于 React 的聊天小部件显示。
//We can always have an init state in case we need to initialize some bot parameters (e.g. welcoming message)
Init {
Next {
//Here we state that the bot will first listen for an utterance matching the Hello intent, it will ignore anything else
intent == Hello --> HandleHello
}
}
HandleHello {
Body {
ReactPlatform.Reply("你好, 你叫什么名字?")
}
Next {
//We wait for the user to input the name, no other transition is possible at this point
//Obviously, in more complex bots we may have several possible outgoing transitions in a given state
intent == MyNameIs --> HandleMyNameIs
}
}
HandleMyNameIs {
Body {
ReactPlatform.Reply("你好 " + context.get("Greetings").get("name"))
}
Next {
// An automatic transition to the Init state since at this point the conversation is finished and we can start again
_ --> Init
}
}
// Default Fallback state could go here以上がステートマシンに基づいたチャットボット設計の経験の概要の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7699
7699
 15
1640
14
1393
52
1287
25
1230
29
15
1640
14
1393
52
1287
25
1230
29

 二代目アメカ登場!彼は観客と流暢にコミュニケーションをとることができ、表情はよりリアルで、数十の言語を話すことができます。
Mar 04, 2024 am 09:10 AM
二代目アメカ登場!彼は観客と流暢にコミュニケーションをとることができ、表情はよりリアルで、数十の言語を話すことができます。
Mar 04, 2024 am 09:10 AM
人型ロボット「アメカ」が第二世代にバージョンアップ!最近、世界移動通信会議 MWC2024 に、世界最先端のロボット Ameca が再び登場しました。会場周辺ではアメカに多くの観客が集まった。 GPT-4 の恩恵により、Ameca はさまざまな問題にリアルタイムで対応できます。 「ダンスをしましょう。」感情があるかどうか尋ねると、アメカさんは非常に本物そっくりの一連の表情で答えました。ほんの数日前、Ameca を支援する英国のロボット企業である EngineeredArts は、チームの最新の開発結果をデモンストレーションしたばかりです。ビデオでは、ロボット Ameca は視覚機能を備えており、部屋全体と特定のオブジェクトを見て説明することができます。最も驚くべきことは、彼女は次のこともできるということです。
 WeChat にチャットが表示されない場合、チャットを復元するにはどうすればよいですか? WeChat にチャット回復方法が表示されない
Mar 13, 2024 pm 01:50 PM
WeChat にチャットが表示されない場合、チャットを復元するにはどうすればよいですか? WeChat にチャット回復方法が表示されない
Mar 13, 2024 pm 01:50 PM
WeChat は、現在最も人気のあるソーシャル ソフトウェアの 1 つとして、豊富なチャット機能を提供します。ただし、場合によっては、「このチャットを表示しない」状況が発生し、重要な会話が非表示になることがあります。これらのチャットを復元するのは、実際には非常に簡単です。これらの手順に従う限り、非表示のチャットを簡単に復元し、引き続き WeChat がもたらす便利なコミュニケーション エクスペリエンスを楽しむことができます。 WeChat にチャットが表示されない場合、チャットを復元するにはどうすればよいですか? WeChat ではチャット回復方法が表示されない 方法 1: WeChat メッセージ リストでチャット パートナーの名前またはキーワードを直接検索してみてください。検索が見つかった場合は、クリックしてチャット インターフェイスに入り、チャットを復元して表示できます。方法 2、友人チャットを通じて復元: WeChat を開き、アドレス帳をクリックし、非表示チャットに表示されている友人を見つけ、クリックしてメッセージを送信します
 2か月後、人型ロボットWalker Sが服をたたむことができるようになった
Apr 03, 2024 am 08:01 AM
2か月後、人型ロボットWalker Sが服をたたむことができるようになった
Apr 03, 2024 am 08:01 AM
Machine Power Report 編集者: Wu Xin 国内版の人型ロボット + 大型模型チームは、衣服を折りたたむなどの複雑で柔軟な素材の操作タスクを初めて完了しました。 OpenAIのマルチモーダル大規模モデルを統合したFigure01の公開により、国内同業者の関連動向が注目を集めている。つい昨日、中国の「ヒューマノイドロボットのナンバーワン株」であるUBTECHは、Baidu Wenxinの大型モデルと深く統合されたヒューマノイドロボットWalkerSの最初のデモを公開し、いくつかの興味深い新機能を示した。 Baidu Wenxin の大規模モデル機能の恩恵を受けた WalkerS は次のようになります。 Figure01 と同様に、WalkerS は動き回るのではなく、机の後ろに立って一連のタスクを完了します。人間の命令に従って服をたたむことができる
 AI はどのようにロボットをより自律的で順応性のあるものにすることができるのでしょうか?
Jun 03, 2024 pm 07:18 PM
AI はどのようにロボットをより自律的で順応性のあるものにすることができるのでしょうか?
Jun 03, 2024 pm 07:18 PM
産業オートメーション技術の分野では、人工知能 (AI) と Nvidia という無視できない 2 つの最近のホットスポットがあります。元のコンテンツの意味を変更したり、コンテンツを微調整したり、コンテンツを書き換えたり、続行しないでください。「それだけでなく、Nvidia はオリジナルのグラフィックス プロセッシング ユニット (GPU) に限定されていないため、この 2 つは密接に関連しています。」このテクノロジーはデジタル ツインの分野にまで広がり、新たな AI テクノロジーと密接に関係しています。「最近、NVIDIA は、Aveva、Rockwell Automation、Siemens などの大手産業オートメーション企業を含む多くの産業企業と提携に至りました。シュナイダーエレクトリック、Teradyne Robotics とその MiR および Universal Robots 企業も含まれます。最近、Nvidiahascoll
 柔軟かつ高速な 5 本の指を備え、人間のタスクを自律的に完了する初のロボットが登場、大型モデルが仮想空間トレーニングをサポート
Mar 11, 2024 pm 12:10 PM
柔軟かつ高速な 5 本の指を備え、人間のタスクを自律的に完了する初のロボットが登場、大型モデルが仮想空間トレーニングをサポート
Mar 11, 2024 pm 12:10 PM
今週、OpenAI、Microsoft、Bezos、Nvidiaが投資するロボット企業FigureAIは、7億ドル近くの資金調達を受け、来年中に自立歩行できる人型ロボットを開発する計画であると発表した。そしてテスラのオプティマスプライムには繰り返し良い知らせが届いている。今年が人型ロボットが爆発的に普及する年になることを疑う人はいないだろう。カナダに拠点を置くロボット企業 SanctuaryAI は、最近新しい人型ロボット Phoenix をリリースしました。当局者らは、多くのタスクを人間と同じ速度で自律的に完了できると主張している。人間のスピードでタスクを自律的に完了できる世界初のロボットである Pheonix は、各オブジェクトを優しくつかみ、動かし、左右にエレガントに配置することができます。自律的に物体を識別できる
 Cloud Whale Xiaoyao 001 の掃除と掃き掃除ロボットには「頭脳」があります。 | 経験
Apr 26, 2024 pm 04:22 PM
Cloud Whale Xiaoyao 001 の掃除と掃き掃除ロボットには「頭脳」があります。 | 経験
Apr 26, 2024 pm 04:22 PM
掃除ロボットやモップ拭きロボットは、近年消費者の間で最も人気のあるスマート家電製品の 1 つです。操作の利便性、あるいは操作の必要がないことで、怠け者は手を解放し、消費者は日常の家事から「解放」され、好きなことにもっと時間を費やすことができるようになり、生活の質が向上します。この流行に乗って、市場に出回っているほぼすべての家電ブランドが独自の掃除ロボットや拭き掃除ロボットを製造しており、掃除ロボット市場全体が非常に活発になっています。しかし、市場の急速な拡大は必然的に隠れた危険をもたらします。多くのメーカーがより多くの市場シェアを急速に占有するために機械の海戦術を使用し、その結果、アップグレードポイントのない多くの新製品が生まれるとも言われています。まさに「マトリョーシカ」モデルです。ただし、すべての掃除ロボットやモップロボットがそうであるわけではありません。
 この人型ロボットは魔法を使うことができます。春祭り祝賀プログラム チームに詳細を調べてもらいましょう
Feb 04, 2024 am 09:03 AM
この人型ロボットは魔法を使うことができます。春祭り祝賀プログラム チームに詳細を調べてもらいましょう
Feb 04, 2024 am 09:03 AM
瞬く間に、ロボットは魔法を使えるようになったのでしょうか?最初にテーブルの上の水スプーンを取り上げ、中には何も入っていないことを観客に証明したのが見られました。次に、卵のような物体を手に置き、水スプーンをテーブルに戻し、が「呪文を唱え」始めました… …再び水スプーンを拾ったそのとき、奇跡が起こりました。元々入っていた卵が消えて、飛び出してきたのがバスケットボールに… もう一度連続動作を見てみましょう: △ このアニメーションは一連の動作を2倍速で表示しており、スムーズに流れています。ビデオを 0.5 倍速で繰り返し再生すると、うまくいくでしょうか? 最後に、手の速度がもっと速ければ、敵から隠すことができるかもしれないという手がかりを発見しました。一部のネチズンは、ロボットの魔法のスキルが自分たちのものよりもさらに高いと嘆いていました。マグは私たちのためにこの魔法を実行してくれたのです。
 未来を形作る 10 台の人型ロボット
Mar 22, 2024 pm 08:51 PM
未来を形作る 10 台の人型ロボット
Mar 22, 2024 pm 08:51 PM
以下の 10 種類の人型ロボットが私たちの未来を形作ります。 1. ASIMO: ホンダが開発した ASIMO は、最もよく知られている人型ロボットの 1 つです。身長 4 フィート、体重 119 ポンドの ASIMO には、高度なセンサーと人工知能機能が装備されており、複雑な環境をナビゲートし、人間と対話することができます。 ASIMO は多用途性を備えているため、障害を持つ人々の支援からイベントでのプレゼンテーションまで、さまざまなタスクに適しています。 2. Pepper: ソフトバンクロボティクスによって作成された Pepper は、人間の社会的パートナーになることを目指しています。表情豊かな顔と感情を認識する能力を備えた Pepper は、会話に参加したり、小売現場で手助けしたり、教育サポートを提供したりすることもできます。コショウ
