

深層学習テクノロジーが変形可能な物体を扱うロボットの問題をどのように解決するか

翻訳者 | Li Rui
査読者 | Sun Shujuan
人間にとって、変形可能なオブジェクトを処理することは、剛体を処理することよりもそれほど難しいことではありません。人々は自然に、さまざまな方法でそれらを形作ったり、折り畳んだり、操作したりすることを学び、それでもそれらを認識することができます。

#しかし、ロボット工学や人工知能システムにとって、変形可能なオブジェクトの操作は大きな課題です。たとえば、ロボットは生地をピザ生地に成形するために一連の手順を実行する必要があります。生地の形状が変化すると、それを記録および追跡する必要があり、同時に作業の各ステップに適切なツールを選択する必要があります。これらは、現在の人工知能システムにとって困難なタスクであり、より予測可能な状態を持つ剛体を扱う場合により安定します。
今回、MIT、カーネギーメロン大学、カリフォルニア大学サンディエゴ校の研究者によって開発された新しいディープラーニング技術は、変形可能な物体を扱う際のロボットシステムの安定性を高めることを約束しています。 DiffSkill と呼ばれるこのテクノロジーは、ディープ ニューラル ネットワークを使用して単純なスキルを学習し、計画モジュールを使用してそれらのスキルを組み合わせて、複数の手順とツールを必要とするタスクを解決します。
強化学習と深層学習による変形可能なオブジェクトの処理
人工知能システムがオブジェクトを処理したい場合、その状態を検出して定義し、オブジェクトがどのように見えるかを予測できなければなりません。未来。剛体の場合、これはほとんど解決された問題です。適切なトレーニング例のセットがあれば、ディープ ニューラル ネットワークはさまざまな角度から硬いオブジェクトを検出できるようになります。変形可能なオブジェクトが関与すると、その複数の状態空間はさらに複雑になります。
カーネギーメロン大学の博士課程の学生であり、DiffSkill 論文の筆頭著者である Lin Xingyu 氏は、「剛体の場合、6 つの数値を使用してその状態を説明できます。3 つの数値は XYZ 座標を表し、
しかし、生地や布地などの変形可能な物体は、その自由度が無限大であるため、その状態を正確に表現することがより困難になります。数学的にモデル化するのもより困難です。」
微分可能な物理シミュレータの開発により、変形可能なオブジェクト操作タスクを解決するための勾配ベースの手法の適用が可能になりました。これは、純粋な試行錯誤の相互作用を通じて環境とオブジェクトのダイナミクスを学習しようとする従来の強化学習手法とは異なります。
DiffSkill は、微分可能な物理シミュレーターである PlasticineLab からインスピレーションを得ており、2021 年の ICLR カンファレンスで発表されました。 PlasticineLab は、微分可能なシミュレーターが短期的なタスクに役立つことを示しています。
PlasticineLab は、微分可能な物理学に基づいた変形可能なオブジェクト シミュレーターです。これは、勾配ベースのモデルのトレーニングに適しています。
しかし、微分可能シミュレーターは、複数のステップとさまざまなツールの使用を必要とする長期的な問題に依然として対処します。微分可能なシミュレーターに基づく人工知能システムには、完全なシミュレーション状態と環境の関連する物理パラメーターに関する知識も必要です。これは、エージェントが通常視覚データと深度センシング データ (RGB-D) を通じて世界を認識する現実世界のアプリケーションでは特に制限となります。
Lin Xingyu 氏は、「私たちは、タスクを完了するために必要な手順をスキルに抽出し、スキルに関する抽象的な概念を学習して、それらをリンクしてより複雑なタスクを解決できるようにできないかと考え始めました。」
DiffSkill は、人工知能エージェントが微分可能な物理モデルを使用してスキルの抽象化を学習し、それらを組み合わせて複雑な操作タスクを完了するフレームワークです。
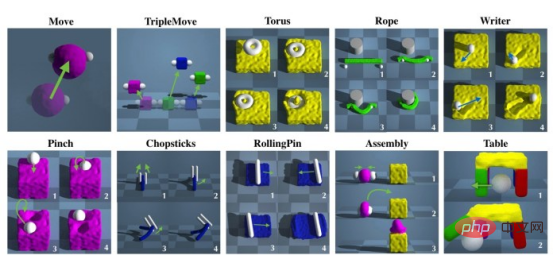
彼のこれまでの研究は、布、ロープ、液体などの変形可能なオブジェクトを操作するための強化学習の使用に焦点を当てていました。 DiffSkill については、課題があったため、生地操作を選択しました。
彼は、「生地の操作は、ロボット グリッパーでは簡単に実行できないため、特に興味深いですが、さまざまなツールを順番に使用する必要があります。これは人間が得意なことですが、ロボットはあまり一般的ではありません。」
トレーニング後、DiffSkill は RGB-D 入力のみを使用して一連の生地操作タスクを正常に完了できます。
ニューラル ネットワークを使用した抽象スキルの学習
DiffSkill 微分可能な物理シミュレーターから取得した初期状態とパラメーターからターゲット状態を予測するニューラル ネットワークのトレーニングの実現可能性
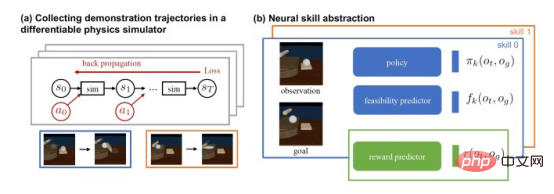
DiffSkill は、ニューラル ネットワークを使用して個人のスキルを学習する「ニューラル スキル アブストラクター」と、長期的なタスクを解決するための「プランナー」の 2 つの主要なコンポーネントで構成されます。
DiffSkill は、微分可能な物理シミュレーターを使用して、スキル アブストラクターのトレーニング サンプルを生成します。これらの例は、めん棒を使用して生地を広げたり、スパチュラを使用して生地を移動したりするなど、単一のツールを使用して短期的な目標を達成する方法を示しています。
これらの例は、RGB-D ビデオの形式でスキル抽象化者に提示されます。画像の観察が与えられた場合、スキル抽象化者は、目的の目標が実現可能かどうかを予測する必要があります。モデルは、その予測を物理シミュレーターからの実際の結果と比較することによって、パラメーターを学習および調整します。
生地などの変形可能な物体のロボット操作には、さまざまなツールの使用に関する長期的な推論が必要です。 DiffSkill アプローチは、微分可能なシミュレーターを活用して、これらの困難なタスクのスキルを学習し、組み合わせます。
一方、DiffSkill は、変分オートエンコーダー (VAE) をトレーニングして、物理シミュレーターによって生成されたサンプルの潜在空間表現を学習します。変分オートエンコーダ (VAE) は重要な機能を保持し、タスクに無関係な情報を破棄します。高次元の画像空間を潜在空間に変換することにより、変分オートエンコーダ (VAE) は、DiffSkill がより長い視野にわたって計画を立て、感覚データの観察から結果を予測できるようにする上で重要な役割を果たします。
変分オートエンコーダー (VAE) をトレーニングする際の重要な課題の 1 つは、VAE が正しい特徴を学習し、現実世界に一般化できるようにすることです。現実世界では、視覚データの構成は物理シミュレータによって生成されるデータとは異なります。たとえば、麺棒やまな板の色は作業に関係ありませんが、麺棒の位置や角度、生地の位置は関係します。
現在、研究者らは、背景や照明などのトレーニング環境の無関係なプロパティをランダム化し、ツールの位置や方向などの重要な機能を保存する「ドメイン ランダム化」と呼ばれる手法を使用しています。これにより、変分オートエンコーダー (VAE) のトレーニングを現実世界に適用した場合の安定性が向上します。
Lin Xingyu 氏は、「シミュレーションと現実世界の間で考えられるすべての違い (sim2real ギャップと呼ばれる) をカバーする必要があるため、これを行うのは簡単ではありません。より良い方法は、3D 点群をシーンとして使用することです」と述べています。これにより、シミュレーションから現実世界への変換が容易になります。実際、点群を入力として使用するフォローアップ プロジェクトを開発中です。」
変形可能なオブジェクトを計画するという長期的なタスク
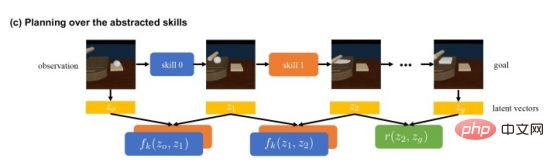
DiffSkill は、計画モジュールを使用して、目標を達成できるさまざまなスキルの組み合わせとシーケンスを評価します。
スキル抽象化ツールがトレーニングされると、DiffSkill はプランナー モジュールを使用して、長い問題を解決します。期間のタスク。プランナーは、初期状態から目的地に到達するために必要なスキルの数と順序を決定する必要があります。
このプランナーは、可能なスキルの組み合わせとその中間結果を繰り返し実行します。ここでは変分オートエンコーダが役に立ちます。 DiffSkill は、完全な画像結果を予測するのではなく、VAE を使用して、最終目標に向かう中間ステップの潜在的な空間結果を予測します。
抽象化スキルと潜在空間表現を組み合わせることで、初期状態から目標までの軌跡の描画がより効率的に計算できるようになります。実際、研究者らは検索機能を改良する必要はなく、すべての組み合わせにわたって徹底的な検索を実行しました。
Lin Xingyu 氏は、「私たちは計画スキルを持っているので、計算作業はそれほど多くなく、時間も長くはありません。この徹底的な検索により、プランナーがデザイナーにつながる可能性のあるスケッチを設計する必要がなくなります」と述べました。新しいソリューションは、より一般的な方法で検討されますが、私たちが試みた限られたタスクではこれは観察されませんでした。さらに、より洗練された検索テクニックを適用することもできます。"
DiffSkill の論文には、「In Optimization of各スキル セットは、単一の NVIDIA 2080Ti GPU で約 10 秒で効率的に完了できます。"
DiffSkill を使用したピザ生地の準備

研究者はパフォーマンスをテストしました2 つのモデルフリー強化学習アルゴリズムと、物理シミュレーターのみを使用した軌道オプティマイザーを含む、変形可能なオブジェクトに適用されているいくつかのベースライン手法に対する DiffSkill の比較。
モデルは、複数のステップとツールを必要とする複数のタスクでテストされました。たとえば、タスクの 1 つでは、AI エージェントは生地をヘラで持ち上げ、まな板の上に置き、麺棒で伸ばす必要がありました。
研究結果によると、DiffSkill は、感覚情報のみを使用して長期にわたるマルチツールのタスクを解決する点で、他のテクノロジーよりも大幅に優れています。実験によると、十分にトレーニングされた後、DiffSkill のプランナーは初期状態と目標状態の間の適切な中間状態を見つけ、タスクを解決するための適切なスキル シーケンスを見つけることができます。
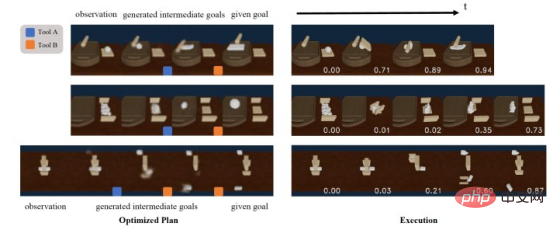
#DiffSkill のプランナーは中間ステップを非常に正確に予測できます
Lin Xingyu 氏は次のように述べています。「主要なポイントの 1 つは、一連のスキルが、長期にわたる推論を可能にする非常に重要な時間的抽象化を提供できるということです。これは、人間がさまざまなタスクに対処する方法と似ています。思考」 「次の瞬間に何をすべきかを考えることではありません。」
しかし、DiffSkill の能力にも限界があります。たとえば、3 段階の計画を必要とするタスクの 1 つを実行すると、DiffSkill のパフォーマンスが大幅に低下しました (ただし、それでも他の手法よりは優れていました)。 Lin Xingyu 氏は、場合によっては、実現可能性予測変数が誤検知を引き起こす可能性があるとも述べました。研究者らは、より良い潜在空間を学習することがこの問題の解決に役立つと考えています。
研究者らは、長時間のタスクに使用できるより効率的な計画アルゴリズムなど、DiffSkill を改善するための他の方向性も模索しています。
Lin Xingyu 氏は、いつか本物のピザ製造ロボットで DiffSkill を使用できるようになることへの希望を表明しました。同氏は、「我々はまだそこからは程遠い。制御、シム2リアル転送、セキュリティにおいてさまざまな課題がある。しかし、我々は今、より自信を持って長期ミッションの立ち上げに挑戦できるようになった。」
原文テキスト タイトル: この深層学習技術は、ロボット工学の困難な課題の 1 つを解決します 、著者: Ben Dickson
以上が深層学習テクノロジーが変形可能な物体を扱うロボットの問題をどのように解決するかの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7554
7554
 15
1382
52
83
11
24
96
15
1382
52
83
11
24
96

 Bytedance Cutting が SVIP スーパー メンバーシップを開始: 継続的な年間サブスクリプションは 499 元で、さまざまな AI 機能を提供
Jun 28, 2024 am 03:51 AM
Bytedance Cutting が SVIP スーパー メンバーシップを開始: 継続的な年間サブスクリプションは 499 元で、さまざまな AI 機能を提供
Jun 28, 2024 am 03:51 AM
このサイトは6月27日、JianyingはByteDanceの子会社であるFaceMeng Technologyによって開発されたビデオ編集ソフトウェアであり、Douyinプラットフォームに依存しており、基本的にプラットフォームのユーザー向けに短いビデオコンテンツを作成すると報告しました。 Windows、MacOS、その他のオペレーティング システム。 Jianyingは会員システムのアップグレードを正式に発表し、インテリジェント翻訳、インテリジェントハイライト、インテリジェントパッケージング、デジタルヒューマン合成などのさまざまなAIブラックテクノロジーを含む新しいSVIPを開始しました。価格的には、クリッピングSVIPの月額料金は79元、年会費は599元(当サイト注:月額49.9元に相当)、継続月額サブスクリプションは月額59元、継続年間サブスクリプションは、年間499元(月額41.6元に相当)です。さらに、カット担当者は、ユーザーエクスペリエンスを向上させるために、オリジナルのVIPに登録している人は、
 Rag と Sem-Rag を使用したコンテキスト拡張 AI コーディング アシスタント
Jun 10, 2024 am 11:08 AM
Rag と Sem-Rag を使用したコンテキスト拡張 AI コーディング アシスタント
Jun 10, 2024 am 11:08 AM
検索強化生成およびセマンティック メモリを AI コーディング アシスタントに組み込むことで、開発者の生産性、効率、精度を向上させます。 JanakiramMSV 著者の EnhancingAICodingAssistantswithContextUsingRAGandSEM-RAG から翻訳。基本的な AI プログラミング アシスタントは当然役に立ちますが、ソフトウェア言語とソフトウェア作成の最も一般的なパターンに関する一般的な理解に依存しているため、最も適切で正しいコードの提案を提供できないことがよくあります。これらのコーディング アシスタントによって生成されたコードは、彼らが解決する責任を負っている問題の解決には適していますが、多くの場合、個々のチームのコーディング標準、規約、スタイルには準拠していません。これにより、コードがアプリケーションに受け入れられるように修正または調整する必要がある提案が得られることがよくあります。
 微調整によって本当に LLM が新しいことを学習できるようになるのでしょうか: 新しい知識を導入すると、モデルがより多くの幻覚を生成する可能性があります
Jun 11, 2024 pm 03:57 PM
微調整によって本当に LLM が新しいことを学習できるようになるのでしょうか: 新しい知識を導入すると、モデルがより多くの幻覚を生成する可能性があります
Jun 11, 2024 pm 03:57 PM
大規模言語モデル (LLM) は巨大なテキスト データベースでトレーニングされ、そこで大量の現実世界の知識を取得します。この知識はパラメータに組み込まれており、必要なときに使用できます。これらのモデルの知識は、トレーニングの終了時に「具体化」されます。事前トレーニングの終了時に、モデルは実際に学習を停止します。モデルを調整または微調整して、この知識を活用し、ユーザーの質問により自然に応答する方法を学びます。ただし、モデルの知識だけでは不十分な場合があり、モデルは RAG を通じて外部コンテンツにアクセスできますが、微調整を通じてモデルを新しいドメインに適応させることが有益であると考えられます。この微調整は、ヒューマン アノテーターまたは他の LLM 作成物からの入力を使用して実行され、モデルは追加の実世界の知識に遭遇し、それを統合します。
 GenAI および LLM の技術面接に関する 7 つのクールな質問
Jun 07, 2024 am 10:06 AM
GenAI および LLM の技術面接に関する 7 つのクールな質問
Jun 07, 2024 am 10:06 AM
AIGC について詳しくは、51CTOAI.x コミュニティ https://www.51cto.com/aigc/Translator|Jingyan Reviewer|Chonglou を参照してください。これらの質問は、インターネット上のどこでも見られる従来の質問バンクとは異なります。既成概念にとらわれずに考える必要があります。大規模言語モデル (LLM) は、データ サイエンス、生成人工知能 (GenAI)、および人工知能の分野でますます重要になっています。これらの複雑なアルゴリズムは人間のスキルを向上させ、多くの業界で効率とイノベーションを推進し、企業が競争力を維持するための鍵となります。 LLM は、自然言語処理、テキスト生成、音声認識、推奨システムなどの分野で幅広い用途に使用できます。 LLM は大量のデータから学習することでテキストを生成できます。
 あなたが知らない機械学習の 5 つの流派
Jun 05, 2024 pm 08:51 PM
あなたが知らない機械学習の 5 つの流派
Jun 05, 2024 pm 08:51 PM
機械学習は人工知能の重要な分野であり、明示的にプログラムしなくてもコンピューターにデータから学習して能力を向上させる機能を提供します。機械学習は、画像認識や自然言語処理から、レコメンデーションシステムや不正行為検出に至るまで、さまざまな分野で幅広く応用されており、私たちの生活様式を変えつつあります。機械学習の分野にはさまざまな手法や理論があり、その中で最も影響力のある 5 つの手法は「機械学習の 5 つの流派」と呼ばれています。 5 つの主要な学派は、象徴学派、コネクショニスト学派、進化学派、ベイジアン学派、およびアナロジー学派です。 1. 象徴主義は、象徴主義とも呼ばれ、論理的推論と知識の表現のためのシンボルの使用を強調します。この学派は、学習は既存の既存の要素を介した逆演繹のプロセスであると信じています。
 新しい科学的で複雑な質問応答ベンチマークと大規模モデルの評価システムを提供するために、UNSW、アルゴンヌ、シカゴ大学、およびその他の機関が共同で SciQAG フレームワークを立ち上げました。
Jul 25, 2024 am 06:42 AM
新しい科学的で複雑な質問応答ベンチマークと大規模モデルの評価システムを提供するために、UNSW、アルゴンヌ、シカゴ大学、およびその他の機関が共同で SciQAG フレームワークを立ち上げました。
Jul 25, 2024 am 06:42 AM
編集者 |ScienceAI 質問応答 (QA) データセットは、自然言語処理 (NLP) 研究を促進する上で重要な役割を果たします。高品質の QA データ セットは、モデルの微調整に使用できるだけでなく、大規模言語モデル (LLM) の機能、特に科学的知識を理解し推論する能力を効果的に評価することもできます。現在、医学、化学、生物学、その他の分野をカバーする多くの科学 QA データ セットがありますが、これらのデータ セットにはまだいくつかの欠点があります。まず、データ形式は比較的単純で、そのほとんどが多肢選択式の質問であり、評価は簡単ですが、モデルの回答選択範囲が制限され、科学的な質問に回答するモデルの能力を完全にテストすることはできません。対照的に、自由回答型の Q&A
 AlphaFold 3 が発売され、タンパク質とすべての生体分子の相互作用と構造をこれまでよりもはるかに高い精度で包括的に予測します。
Jul 16, 2024 am 12:08 AM
AlphaFold 3 が発売され、タンパク質とすべての生体分子の相互作用と構造をこれまでよりもはるかに高い精度で包括的に予測します。
Jul 16, 2024 am 12:08 AM
エディター | Radish Skin 2021 年の強力な AlphaFold2 のリリース以来、科学者はタンパク質構造予測モデルを使用して、細胞内のさまざまなタンパク質構造をマッピングし、薬剤を発見し、既知のあらゆるタンパク質相互作用の「宇宙地図」を描いてきました。ちょうど今、Google DeepMind が AlphaFold3 モデルをリリースしました。このモデルは、タンパク質、核酸、小分子、イオン、修飾残基を含む複合体の結合構造予測を実行できます。 AlphaFold3 の精度は、これまでの多くの専用ツール (タンパク質-リガンド相互作用、タンパク質-核酸相互作用、抗体-抗原予測) と比較して大幅に向上しました。これは、単一の統合された深層学習フレームワーク内で、次のことを達成できることを示しています。
 SOTA パフォーマンス、厦門マルチモーダルタンパク質-リガンド親和性予測 AI 手法、初めて分子表面情報を結合
Jul 17, 2024 pm 06:37 PM
SOTA パフォーマンス、厦門マルチモーダルタンパク質-リガンド親和性予測 AI 手法、初めて分子表面情報を結合
Jul 17, 2024 pm 06:37 PM
編集者 | KX 医薬品の研究開発の分野では、タンパク質とリガンドの結合親和性を正確かつ効果的に予測することが、医薬品のスクリーニングと最適化にとって重要です。しかし、現在の研究では、タンパク質とリガンドの相互作用における分子表面情報の重要な役割が考慮されていません。これに基づいて、アモイ大学の研究者らは、初めてタンパク質の表面、3D 構造、配列に関する情報を組み合わせ、クロスアテンション メカニズムを使用して異なるモダリティの特徴を比較する、新しいマルチモーダル特徴抽出 (MFE) フレームワークを提案しました。アライメント。実験結果は、この方法がタンパク質-リガンド結合親和性の予測において最先端の性能を達成することを実証しています。さらに、アブレーション研究は、この枠組み内でのタンパク質表面情報と多峰性特徴の位置合わせの有効性と必要性を実証しています。 「S」で始まる関連研究
