

本気ですか?ロボット犬をゴールキーパーにして論文を出版する

ロボット犬にサッカーのゴールキーパーをさせるのは信頼できるのでしょうか?信頼できるかどうかは、まずは効果を見てから結論を出しましょう。
スタッフは非常に穏やかな攻撃をしましたが、ロボット犬がボールをブロックしました:

続き難しいですが、放物線状のゴールを決めるのは問題ありません:

ボールを手で投げるのは不正行為の疑いがありますか?足で試してみると、ロボット犬もゴールを守ることができます。

興味深いことに、この研究では、ロボット犬を使って遊ぶことも試みられました。 2 匹のロボット犬が単独でプレイできるのは素晴らしいことです:

効果を確認した後、私はこう思いました。ロボット犬がゴールキーパーになっているような感じで、かなり頼もしいです。このロボット犬は、2019 年に MIT によって開発された Mini Cheetah です。現在、カリフォルニア大学バークレー校およびその他の機関の研究者は、Mini Cheetah 用の新しい強化学習フレームワークを導入し、サッカーのゴールキーパーのタスクをゴールキーパーの成功率で完了できるようにしています。 87.5%。
論文アドレス: https://arxiv.org/pdf/2210.04435.pdf
4 メートル離れたところからボールを蹴る
ミニ チーターは 1 秒未満でゴールを守ることに成功しました。
ミニ チーターがゴールを守ることを学ぶのは依然として困難です。これは、オブジェクトの高さとダイナミクスが関係するためです (例:移動位置、具体的には、一方は方向や位置が不確実な高速で移動するボールを操作し、もう一方はボールの位置を素早く判断してゴールを防ぐ必要があります。これを達成するには、ボールをブロックするために足 (または顔) が時間内に必要な場所に確実に到達するようにしながら、体を動的に動かすようにロボットに教える必要があります。これは基本的に 2 つのパズルを 1 つにまとめたものです。
この研究の解決策は、モーション コントローラーとエンド エフェクターの軌道計画を組み合わせて、ボールがターゲットに到達する前にミニ チーターを作成する最適な方法を見つけることです。 1秒、ブロック。
上記のプロセスを完了するには、ミニ チーターは、一連の有用なゴールキーピング スキルを習得するようにトレーニングする必要もあります。たとえば、ミニ チーターは、ボールの近くおよび近くでの横方向のインターセプトを習得する必要があります。地面を蹴ってダイビングをマスターし、ゴール下隅に到達したり、ゴール上隅や上隅にジャンプしたりするテクニック。これらのアクションを完了すると、ミニ チーターは回復し、最終的には安全に着陸することができます。各スキルの基準動作は手動でプログラムされ、シミュレーションでトレーニングされてから、ロボットに直接転送されます。
ミニ チーターが守るゴールは幅 1.5 メートル、高さ 0.9 メートルで、約 4 メートル離れたところからボール (3 番) が蹴られ、ボールを外側から追跡し、ミニ チーターがブロックします。それ。このような小さなロボット犬がボールをブロックするアクションを完了するパフォーマンスは印象的です。

研究では、ロボット犬システムが、シミュレーションで学習したダイナミックな動きとゴールキーピングのスキルを実際の四足動物に伝達できることが示されています。現実世界におけるランダムなシュートに対するゴールキーピングの成功率は 87.5% でした。人間のサッカーゴールキーパーの平均成功率は69%です。研究者らは、提案したフレームワークはマルチスキルフットボールなどの他のシナリオにも拡張できると述べている。
このロボット犬の背後にあるフレームワークを見てみましょう。
階層型強化学習フレームワーク
まず第一に、四足ロボットをサッカーのゴールキーパーにするのは非常に困難な問題です。なぜなら、それは物体の軌道を予測する問題と、掴まないオブジェクトのキャプチャ オブジェクト (球) を保持する際の 2 つの実際的な問題。ロボットは、非常に短い時間内 (通常は 1 秒未満) に空中を飛んでいるボールに反応して迎撃する必要があります。
この課題を達成するために、研究チームは階層モデルフリーの強化学習 (RL) フレームワークを提案しました。このフレームワークには、さまざまな運動能力に対応する複数の制御戦略が含まれており、ターゲットのさまざまな領域をカバーします。

これらの制御戦略により、ロボットは、ジャンプしてボールをブロックする、飛び込むなどの特定の運動スキルを実行しながら、ランダムにパラメータ化されたエンドエフェクターの軌道を追跡できます。ボールとボールが地面に転がるのを止めます。

#RL フレームワークには、ロボットが必要な運動スキルを決定し、エンドエフェクターの軌道を計画してロボットを阻止するのに役立つ高レベルのプランナーが含まれています。飛行方向 異なるターゲットエリアにボールが飛びます。
この研究では、2019 年に MIT によって提案された Mini Cheetah 四足歩行ロボットに上記の RL フレームワークを導入しました。実験により、この RL フレームワークにより、四足ロボットが現実の高速動作を効果的に遮断できることが示されました。世界のボール。

四足ロボットの RL フレームワークに関するこれまでの研究は、主にロボットを必要な速度で歩行させたり、基準動作を模倣します。この研究で提案されたフレームワークは、学習した運動スキルをより高いレベルのタスクに拡張し、高度な計画をうまく利用して、四足ロボットが素早い動きで高速で動くサッカーを正確に迎撃できるようにします。これは、四足ロボットの高度な計画制御にとって重要な意味を持ちます。
以上が本気ですか?ロボット犬をゴールキーパーにして論文を出版するの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7476
7476
 15
1377
52
77
11
19
32
15
1377
52
77
11
19
32

 Stable Diffusion 3 の論文がついに公開され、アーキテクチャの詳細が明らかになりましたが、Sora の再現に役立つでしょうか?
Mar 06, 2024 pm 05:34 PM
Stable Diffusion 3 の論文がついに公開され、アーキテクチャの詳細が明らかになりましたが、Sora の再現に役立つでしょうか?
Mar 06, 2024 pm 05:34 PM
StableDiffusion3 の論文がついに登場しました!このモデルは2週間前にリリースされ、Soraと同じDiT(DiffusionTransformer)アーキテクチャを採用しており、リリースされると大きな話題を呼びました。前バージョンと比較して、StableDiffusion3で生成される画像の品質が大幅に向上し、マルチテーマプロンプトに対応したほか、テキスト書き込み効果も向上し、文字化けが発生しなくなりました。 StabilityAI は、StableDiffusion3 はパラメータ サイズが 800M から 8B までの一連のモデルであると指摘しました。このパラメーター範囲は、モデルを多くのポータブル デバイス上で直接実行できることを意味し、AI の使用を大幅に削減します。
 ICCV'23論文賞「Fighting of Gods」! Meta Divide Everything と ControlNet が共同で選ばれました、審査員を驚かせた記事がもう 1 つありました
Oct 04, 2023 pm 08:37 PM
ICCV'23論文賞「Fighting of Gods」! Meta Divide Everything と ControlNet が共同で選ばれました、審査員を驚かせた記事がもう 1 つありました
Oct 04, 2023 pm 08:37 PM
フランスのパリで開催されたコンピュータービジョンのトップカンファレンス「ICCV2023」が閉幕しました。今年の論文賞はまさに「神と神の戦い」です。たとえば、最優秀論文賞を受賞した 2 つの論文には、ヴィンセント グラフ AI の分野を覆す研究である ControlNet が含まれていました。 ControlNet はオープンソース化されて以来、GitHub で 24,000 個のスターを獲得しています。拡散モデルであれ、コンピュータ ビジョンの全分野であれ、この論文の賞は当然のことです。最優秀論文賞の佳作は、同じく有名なもう 1 つの論文、Meta の「Separate Everything」「Model SAM」に授与されました。 「Segment Everything」は、発売以来、後発のものも含め、さまざまな画像セグメンテーション AI モデルの「ベンチマーク」となっています。
 Yunshen、業界アプリケーションの主力ロボット犬 Jueying X30 をリリース
Oct 11, 2023 pm 09:45 PM
Yunshen、業界アプリケーションの主力ロボット犬 Jueying X30 をリリース
Oct 11, 2023 pm 09:45 PM
雲深科技は10月9日、四足歩行ロボット「Jueying X30」を発表、産業用途向けの新世代の産業レベル製品として、発電所、工場、パイプギャラリー検査、緊急救助、火災調査、将来の科学研究などを対象としている。など。多分野のコア需要により、世界をリードする業界能力がもたらされます。独自の統合センシング機能、変化する環境下での迅速かつ安定した障害物の通過、中空の工業用階段の上り下り、全天候型自律検査日を実現するアジアをリードする独自の統合センシング機能夜間や夜間など、より多くのシーンの制約を打ち破り、予期せぬ作業にも迅速に対応し、アジアで初めて四足歩行ロボットの動作温度範囲を-20℃~55℃に拡張し、適用範囲を大幅に拡大し、独自のリアルタイム監視システムと緊急対応システムを備えており、よりスマートな運用を保証し、安全かつ効率的です。工業情報化省を含む17の部門は、「機械」を発行しました。
 NeRFと自動運転の過去と現在、10本近くの論文をまとめました!
Nov 14, 2023 pm 03:09 PM
NeRFと自動運転の過去と現在、10本近くの論文をまとめました!
Nov 14, 2023 pm 03:09 PM
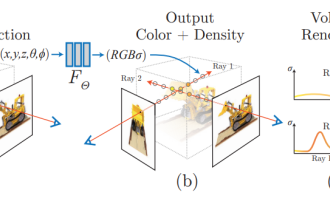
Neural Radiance Fieldsは2020年に提案されて以来、関連論文の数が飛躍的に増加し、3次元再構成の重要な分野となっただけでなく、自動運転の重要なツールとして研究の最前線でも徐々に活発になってきています。 NeRF は、過去 2 年間で突然出現しました。その主な理由は、特徴点の抽出とマッチング、エピポーラ幾何学と三角形分割、PnP とバンドル調整、および従来の CV 再構成パイプラインのその他のステップをスキップし、メッシュ再構成、マッピング、ライト トレースさえもスキップするためです。 、2D から直接入力画像を使用して放射線野を学習し、実際の写真に近いレンダリング画像が放射線野から出力されます。言い換えれば、ニューラル ネットワークに基づく暗黙的な 3 次元モデルを指定されたパースペクティブに適合させます。
 紙のイラストも拡散モデルを使用して自動生成でき、ICLR にも受け入れられます。
Jun 27, 2023 pm 05:46 PM
紙のイラストも拡散モデルを使用して自動生成でき、ICLR にも受け入れられます。
Jun 27, 2023 pm 05:46 PM
生成 AI は人工知能コミュニティに旋風を巻き起こし、個人も企業も、Vincent 写真、Vincent ビデオ、Vincent 音楽など、関連するモーダル変換アプリケーションの作成に熱心になり始めています。最近、ServiceNow Research や LIVIA などの科学研究機関の数人の研究者が、テキストの説明に基づいて論文内のグラフを生成しようとしました。この目的のために、彼らは FigGen の新しい手法を提案し、関連する論文も TinyPaper として ICLR2023 に掲載されました。絵用紙のアドレス: https://arxiv.org/pdf/2306.00800.pdf 絵用紙のチャートを生成するのは何がそんなに難しいのかと疑問に思う人もいるかもしれません。これは科学研究にどのように役立ちますか?
 火を吐きながら踊る、ロボット犬の最新スキルがネット上で話題に!ネチズンはそれを「真のホットドッグ」と呼んでいます
Jun 28, 2023 pm 06:20 PM
火を吐きながら踊る、ロボット犬の最新スキルがネット上で話題に!ネチズンはそれを「真のホットドッグ」と呼んでいます
Jun 28, 2023 pm 06:20 PM
マスク氏が火炎放射器を発明した後、今ではロボット犬ですら火を吐くことを学ぶことができるようになりました。立ち上がって、狙いを定めて、火を吐くという一連のアクションを一度に実行できます。それだけでなく、火を吐きながら「タップ ダンス」することもできます。この魔法のビデオはすぐに Reddit で 7,000 回以上の再生回数を獲得し、一部のネチズンは次のようにジョークを言いました。ブラックミラーを再訪することを思い出させます。画像画像 一部のネチズンはその名前をホットドッグに変更することを提案しました:「誰かがそれをそう呼ぶに違いないことはわかっています。」 画像画像 それでは、この「ホットドッグ」はどのようなものですか?火を吐くロボット犬はどのようなものですか?この火を吐くロボット犬は Themonator と呼ばれ、ThrowFlame という会社から提供されています。公式サイトによると、重さは約16kg、サイズは約76×51×51とのこと。
 チャットのスクリーンショットから AI レビューの隠されたルールが明らかになります。 AAAI 3000元は強力に受け入れられますか?
Apr 12, 2023 am 08:34 AM
チャットのスクリーンショットから AI レビューの隠されたルールが明らかになります。 AAAI 3000元は強力に受け入れられますか?
Apr 12, 2023 am 08:34 AM
AAAI 2023 の論文提出期限が近づいていたとき、AI 投稿グループの匿名チャットのスクリーンショットが突然 Zhihu に表示されました。そのうちの1人は、「3,000元で強力なサービスを提供できる」と主張した。このニュースが発表されるとすぐに、ネットユーザーの間で国民の怒りを引き起こした。ただし、まだ急ぐ必要はありません。 Zhihuのボス「Fine Tuning」は、これはおそらく単に「言葉による喜び」である可能性が高いと述べた。 『ファイン・チューニング』によると、挨拶や集団犯罪はどの分野でも避けられない問題だという。 openreview の台頭により、cmt のさまざまな欠点がますます明らかになり、小さなサークルが活動できる余地は将来的には小さくなるでしょうが、余地は常にあります。これは個人の問題であり、投稿システムや仕組みの問題ではないからです。オープンRの紹介
 CVPR 2023 ランキング発表、採択率は 25.78%! 2,360 件の論文が受理され、投稿数は 9,155 件に急増しました。
Apr 13, 2023 am 09:37 AM
CVPR 2023 ランキング発表、採択率は 25.78%! 2,360 件の論文が受理され、投稿数は 9,155 件に急増しました。
Apr 13, 2023 am 09:37 AM
ちょうど今、CVPR 2023 が次のような記事を発表しました: 今年は記録的な 9,155 件の論文 (CVPR2022 より 12% 増) を受け取り、2,360 件の論文を受理し、受理率は 25.78% でした。統計によると、CVPRへの投稿数は2010年から2016年の7年間で1,724件から2,145件に増加しただけです。 2017年以降は急上昇して高度成長期に入り、2019年には初めて5,000件を超え、2022年には投稿数が8,161件に達した。ご覧のとおり、今年は合計 9,155 件の論文が投稿され、確かに記録を樹立しました。流行が緩和された後、今年のCVPRサミットはカナダで開催される予定だ。今年はシングルトラックカンファレンスとなり、従来の口頭選考は中止される。グーグルリサーチ
