

ヒトとマウスのハイブリッド脳が登場!スタンフォード大学の7年間の研究がNatureに掲載

この記事はAI New Media Qubit(公開アカウントID:QbitAI)の許可を得て転載しておりますので、転載については出典元にご連絡ください。
ヒト由来の脳様オルガノイドは、科学者の手によってマウスの脳と結合することに成功しました。
そして、マウスのひげに触れると、これらの脳細胞は 正常に反応します。
スタンフォード大学のこの研究結果は、Nature 誌の最新号に掲載されました。

この「人間とマウスのハイブリッド脳」の組み合わせはどれほど深いのでしょうか?
責任著者であるスタンフォード神経科学者セルジウ・パスカ氏自身の言葉では、:
これは、回路に新しいトランジスタを追加するようなものです。 一体何が起こったのでしょうか? ヒトの脳様組織をラットの脳に統合するこれを明確にするために、オルガノイドから始める必要があります。
オルガノイドは、胚性幹細胞や人工多能性幹細胞などのヒト幹細胞から培養された細胞の集合体です。 近年、オルガノイドは神経科学の分野で学術的に注目を集めています。これらの三次元微小器官には、代表的な器官のいくつかの重要な特徴が含まれており、人間の発達や病気のシミュレーションに使用できるためです。ビトロ。 言い換えれば、科学者はオルガノイドの助けを借りて、腎臓、腸、さらにはペトリ皿内の脳のさまざまな構造を直接観察して、根底にある神経機構を調査することができます。 便利といえば便利ですが、オルガノイドには多くの制限もあります。 たとえば、脳オルガノイドは人間の脳を模倣することはできますが、本物の脳のように神経接続を確立することが難しく、行動を制御する他の神経回路と統合することができません。 スタンフォード大学の研究者たちは、この限界を突破することを目指しています。 彼らの実験計画は次のとおりです: まず、ヒト幹細胞を使用して、大脳皮質に似た脳のような構造を培養します。 次に、生後 2 ~ 3 日の無胸腺ラットの脳の体性感覚皮質に移植しました。ラットの脳のこの領域は、ひげや他の感覚器官から信号を受け取り、他の脳領域に伝達します。

その一部となっています!
この時点までに、研究者らは、マウスの体性感覚皮質にあるヒトの細胞も、マウスのひげに触れると反応することを発見しました。 さらに研究者らは、特定の周波数の青色光によって個々のニューロンが活性化できるように、人間の脳組織の一部を特別に処理しました。 これらの人間の脳組織を移植されたラットは、新しいトレーニングに参加しました: 極細の光ファイバーが脳に埋め込まれ、これらの光ファイバーが青色光を発すると、ラットは蛇口から水を飲むことができました。 結果は、ラットが青色光と飲料水を関連付けることを学習したことを示しました。これは、移植された人間の脳細胞が実際にラットの脳の働きに関与していることを示した。 研究者らは、ラットの脳に移植された脳オルガノイドは、体外で培養された脳オルガノイドよりも形態と機能がより複雑であると述べたことは注目に値します。 ###############それはどういう意味ですか? 科学者たちは、このような実験を通じて、ヒトの神経変性疾患や精神疾患などをさらに研究し、効果的な新薬を開発できるのではないかとの期待を表明しました。 
神経関連疾患患者の脳組織の活動をより深く理解するために、この研究は 7 年間続きました。
ある実験では、研究者らはティモシー症候群(TS)患者の幹細胞から増殖させた脳オルガノイドをマウスの脳の一部に移植し、別の実験では比較のために健康な人間の脳オルガノイドに移植した。

Tiモージー症候群は稀な遺伝性疾患であり、患者は不整脈を起こしやすい)マウスに移植してから 5 ~ 6 か月後、病気の細胞が小さくなり、健康な脳細胞とはまったく異なる電気活動を行っていることが観察されました。
さらに、TS ニューロンの末端の樹状突起の形態は大きく変化しています。
更なる分析により、同様の分化段階において、ラット脳におけるTS t-hCOの樹状分岐パターンは異常であるが、インビトロで培養されたTS t-hCOの樹状分岐パターンはこのパターンを示さないことが判明した。 。
研究者らは、ラットの脳の分岐パターンが異常であり、この病気に関する以前の研究と一致していると指摘した。
人間の脳をラットに移植することによって病気の表現型を明らかにする効果は非常に優れていることがわかります。
全体として、この研究は生物学界および医学界の多くの人々の注目を集めています。
イギリス、ケンブリッジ医学研究評議会のメンバー、マデリン・A・ランカスター氏は
次のようにコメントしました:この研究は全体的に非常に進歩的であり、病気を理解する新しい方法を提供します。脳細胞の機能不全を伴う。
しかし実際には、これまでのところ大きな問題は起こっていないようで、人間のような脳を移植したことによってマウスが賢くなったわけではありません。 米国科学・工学・医学アカデミーが昨年発表した報告書では、「ヒト由来の脳オルガノイドは、意識や人間の知性を形成するにはまだ原始的すぎる」と述べられている。著者のパスカル教授は、実験の過程と結果から判断すると、ラットは人間の脳オルガノイドに非常によく耐え、移植によっててんかんなどの問題は引き起こされなかったと述べた。 にもかかわらず、学界では依然として懐疑的な声が多い。 全米科学アカデミーの委員会メンバーであるアーロッタさんは、科学の発展に伴い新たな問題が生じる可能性が高いと感じており、別の見解を持っています。 彼女は、「人間の臓器と他の生物の統合」というテーマには継続的に注目すべきであり、一度議論しただけで無視されるべきではないと述べました。 特にサルやオランウータンなどの霊長類は人間により近いため、人間の脳に似た器官が体内でより成熟して発達し、動物の行動に大きな影響を与える可能性があります。 この点に関して、パスカル教授は、今後そのような研究は行わず、他の人にもそのような研究を奨励するつもりはないと述べました。 さらに、一部の研究者は、この研究の限界を指摘しました: 「ミニ人間の脳」をラットに移植した結果は、これまでの他の動物実験よりも優れていましたが、時空間的および時間的な問題により、種間の制限により、高度に縮小可能な人間の神経回路は、発生の初期段階で移植されても形成されません。 UCLA 生物医学・幹細胞研究センターのメンバー、ベネット・ノビッチ氏も次のようにコメントしています。 人間の脳組織を移植したラットを使用して薬剤を試験することは、小規模な研究には実行可能ですが、適切ではありませんスピードと規模が必要なため、企業にはまだ実現できません。 研究チームこの研究を実施したチームは、スタンフォード大学の精神医学および行動科学学部と比較医学学部から来ました。 一般出演: オマー・レバ、フェリシティ・ゴア、ケビン・W・ケリー。 オマー・レバ氏、ヘブライ大学の生理学および計算神経科学の博士号博士課程を卒業後、スタンフォード大学の精神医学および行動科学部で博士研究員として働いていました。現在、ヘブライ大学獣医学部の助教授を務めています。 フェリシティ ゴアは現在、スタンフォード大学の生物工学部で研究に従事しています。 ケビン W. ケリーは現在、スタンフォード大学の精神医学および行動科学部門で神経科学とゲノミクスを研究しています。 対応著者のセルジウ・パスカこの研究が新たな倫理問題も提起していることは注目に値するが、外の世界は、こうした「人間と他の生物学的ハイブリッド」が動物福祉に深刻なダメージを与え、さらには「ネズミ人間」を生み出すのではないかと懸念している。
は現在、スタンフォード大学の精神医学および行動科学科の教授です。
論文アドレス:
https://www.nature.com/articles/s41586-022-05277-w 参考リンク:
[1]https://www.nature.com/articles/d41586-022-03238-xx
##[2]https://www.washingtonpost.com/science/2022/10/12/brain-tissue-rats-stanford/
以上がヒトとマウスのハイブリッド脳が登場!スタンフォード大学の7年間の研究がNatureに掲載の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7752
7752
 15
1643
14
1398
52
1293
25
1234
29
15
1643
14
1398
52
1293
25
1234
29

 Stable Diffusion 3 の論文がついに公開され、アーキテクチャの詳細が明らかになりましたが、Sora の再現に役立つでしょうか?
Mar 06, 2024 pm 05:34 PM
Stable Diffusion 3 の論文がついに公開され、アーキテクチャの詳細が明らかになりましたが、Sora の再現に役立つでしょうか?
Mar 06, 2024 pm 05:34 PM
StableDiffusion3 の論文がついに登場しました!このモデルは2週間前にリリースされ、Soraと同じDiT(DiffusionTransformer)アーキテクチャを採用しており、リリースされると大きな話題を呼びました。前バージョンと比較して、StableDiffusion3で生成される画像の品質が大幅に向上し、マルチテーマプロンプトに対応したほか、テキスト書き込み効果も向上し、文字化けが発生しなくなりました。 StabilityAI は、StableDiffusion3 はパラメータ サイズが 800M から 8B までの一連のモデルであると指摘しました。このパラメーター範囲は、モデルを多くのポータブル デバイス上で直接実行できることを意味し、AI の使用を大幅に削減します。
 座標系の変換を本当にマスターしましたか?自動運転と切り離せないマルチセンサーの問題
Oct 12, 2023 am 11:21 AM
座標系の変換を本当にマスターしましたか?自動運転と切り離せないマルチセンサーの問題
Oct 12, 2023 am 11:21 AM
最初のパイロットおよび重要な記事では、主に自動運転技術で一般的に使用されるいくつかの座標系と、それらの間の相関と変換を完了し、最終的に統合環境モデルを構築する方法を紹介します。ここでの焦点は、車両からカメラの剛体への変換 (外部パラメータ)、カメラから画像への変換 (内部パラメータ)、および画像からピクセル単位への変換を理解することです。 3D から 2D への変換には、対応する歪み、変換などが発生します。要点:車両座標系とカメラ本体座標系を平面座標系とピクセル座標系に書き換える必要がある 難易度:画像の歪みを考慮する必要がある 歪み補正と歪み付加の両方を画面上で補正する2. はじめに ビジョンシステムには、ピクセル平面座標系 (u, v)、画像座標系 (x, y)、カメラ座標系 ()、世界座標系 () の合計 4 つの座標系があります。それぞれの座標系には関係性があり、
 自動運転と軌道予測についてはこの記事を読めば十分です!
Feb 28, 2024 pm 07:20 PM
自動運転と軌道予測についてはこの記事を読めば十分です!
Feb 28, 2024 pm 07:20 PM
自動運転では軌道予測が重要な役割を果たしており、自動運転軌道予測とは、車両の走行過程におけるさまざまなデータを分析し、将来の車両の走行軌跡を予測することを指します。自動運転のコアモジュールとして、軌道予測の品質は下流の計画制御にとって非常に重要です。軌道予測タスクには豊富な技術スタックがあり、自動運転の動的/静的知覚、高精度地図、車線境界線、ニューラル ネットワーク アーキテクチャ (CNN&GNN&Transformer) スキルなどに精通している必要があります。始めるのは非常に困難です。多くのファンは、できるだけ早く軌道予測を始めて、落とし穴を避けたいと考えています。今日は、軌道予測に関するよくある問題と入門的な学習方法を取り上げます。関連知識の紹介 1. プレビュー用紙は整っていますか? A: まずアンケートを見てください。
 DualBEV: BEVFormer および BEVDet4D を大幅に上回る、本を開いてください!
Mar 21, 2024 pm 05:21 PM
DualBEV: BEVFormer および BEVDet4D を大幅に上回る、本を開いてください!
Mar 21, 2024 pm 05:21 PM
この論文では、自動運転においてさまざまな視野角 (遠近法や鳥瞰図など) から物体を正確に検出するという問題、特に、特徴を遠近法 (PV) 空間から鳥瞰図 (BEV) 空間に効果的に変換する方法について検討します。 Visual Transformation (VT) モジュールを介して実装されます。既存の手法は、2D から 3D への変換と 3D から 2D への変換という 2 つの戦略に大別されます。 2D から 3D への手法は、深さの確率を予測することで高密度の 2D フィーチャを改善しますが、特に遠方の領域では、深さ予測に固有の不確実性により不正確さが生じる可能性があります。 3D から 2D への方法では通常、3D クエリを使用して 2D フィーチャをサンプリングし、Transformer を通じて 3D と 2D フィーチャ間の対応のアテンション ウェイトを学習します。これにより、計算時間と展開時間が増加します。
 初のマルチビュー自動運転シーンビデオ生成世界モデル | DrivingDiffusion: BEV データとシミュレーションの新しいアイデア
Oct 23, 2023 am 11:13 AM
初のマルチビュー自動運転シーンビデオ生成世界モデル | DrivingDiffusion: BEV データとシミュレーションの新しいアイデア
Oct 23, 2023 am 11:13 AM
著者の個人的な考えの一部 自動運転の分野では、BEV ベースのサブタスク/エンドツーエンド ソリューションの開発に伴い、高品質のマルチビュー トレーニング データとそれに対応するシミュレーション シーンの構築がますます重要になってきています。現在のタスクの問題点に対応して、「高品質」は 3 つの側面に分離できます。 さまざまな次元のロングテール シナリオ: 障害物データ内の近距離車両、車両切断中の正確な進行角、車線などラインデータ 曲率の異なるカーブやランプ・合流・合流などの撮影が難しいシーン。これらは多くの場合、大量のデータ収集と複雑なデータ マイニング戦略に依存しており、コストがかかります。 3D 真の値 - 一貫性の高い画像: 現在の BEV データ取得は、センサーの設置/校正、高精度マップ、再構成アルゴリズム自体のエラーの影響を受けることがよくあります。これが私を導いた
 GSLAM | 一般的な SLAM アーキテクチャとベンチマーク
Oct 20, 2023 am 11:37 AM
GSLAM | 一般的な SLAM アーキテクチャとベンチマーク
Oct 20, 2023 am 11:37 AM
19 年前の論文を突然発見 GSLAM: A General SLAM Framework and Benchmark オープンソース コード: https://github.com/zdzhaoyong/GSLAM 全文に直接アクセスして、この作品の品質を感じてください ~ 1 抽象的な SLAM テクノロジー近年多くの成功を収め、多くのハイテク企業の注目を集めています。ただし、既存または新たなアルゴリズムへのインターフェイスを使用して、速度、堅牢性、移植性に関するベンチマークを効果的に実行する方法は依然として問題です。この論文では、GSLAM と呼ばれる新しい SLAM プラットフォームを提案します。これは、評価機能を提供するだけでなく、研究者が独自の SLAM システムを迅速に開発するための有用な方法を提供します。
 「Minecraft」が AI の街に変わり、NPC の住人が本物の人間のようにロールプレイ
Jan 02, 2024 pm 06:25 PM
「Minecraft」が AI の街に変わり、NPC の住人が本物の人間のようにロールプレイ
Jan 02, 2024 pm 06:25 PM
この四角い男性は、目の前にいる「招かれざる客」の正体について考えながら眉をひそめていることに注意してください。彼女が危険な状況にあることが判明し、これに気づくと、彼女は問題を解決するための戦略を見つけるためにすぐに頭の中で探索を始めました。最終的に、彼女は現場から逃走し、できるだけ早く助けを求め、直ちに行動を起こすことにしました。同時に、反対側の人も彼女と同じことを考えていた……『マインクラフト』では、登場人物全員が人工知能によって制御されている、そんなシーンがありました。それぞれに個性的な設定があり、例えば先ほどの女の子は17歳ながら賢くて勇敢な配達員です。彼らは記憶力と思考力を持ち、Minecraft の舞台となるこの小さな町で人間と同じように暮らしています。彼らを動かすのはまったく新しいものであり、
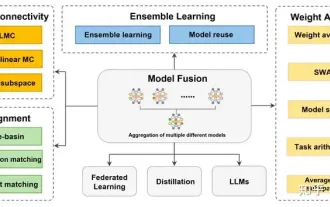 レビュー!深いモデルの融合 (LLM/基本モデル/フェデレーテッド ラーニング/ファインチューニングなど)
Apr 18, 2024 pm 09:43 PM
レビュー!深いモデルの融合 (LLM/基本モデル/フェデレーテッド ラーニング/ファインチューニングなど)
Apr 18, 2024 pm 09:43 PM
9 月 23 日、論文「DeepModelFusion:ASurvey」が国立国防技術大学、JD.com、北京理工大学によって発表されました。ディープ モデルの融合/マージは、複数のディープ ラーニング モデルのパラメーターまたは予測を 1 つのモデルに結合する新しいテクノロジーです。さまざまなモデルの機能を組み合わせて、個々のモデルのバイアスとエラーを補償し、パフォーマンスを向上させます。大規模な深層学習モデル (LLM や基本モデルなど) での深層モデルの融合は、高い計算コスト、高次元のパラメーター空間、異なる異種モデル間の干渉など、いくつかの課題に直面しています。この記事では、既存のディープ モデル フュージョン手法を 4 つのカテゴリに分類します。 (1) 「パターン接続」。損失低減パスを介して重み空間内の解を接続し、より適切な初期モデル フュージョンを取得します。
