

「どうして追いかけてくるの?」
#「シロップが急いで必要だから。」

さて、今日紹介するソフトロボットはチーターの2倍の速さで走ることができるので、非常用シロップには気をつけてください。 F1カーよりもさらに速く、最高速度70体長/秒で走ることができるが、チーターは約25体長/秒、F1カーは50体長/秒で走る。相対速度の長い表現により、さまざまな体サイズのさまざまな生物の速度を定量化できます)。
このペースはちょっと素朴なホタテ貝のように見えますが、まばたきをしないように注意してください。まばたきをしないと消えてしまいます。
ヨハネス・ケプラー大学ソフトマテリアル研究室チームが開発した電磁駆動の小型ソフトロボットで、切手サイズしかなく、超高速で動作するだけでなく、泳いだり、段差を登ったり、障害物を越えたり、荷物を運んだりすることもできます。
この研究は、「超高速小型ソフト電磁ロボット」というタイトルで Nature Communications 誌に掲載されました。 ”。
この記事の責任者および筆頭著者は、中国出身の Guoyong Mao 博士で、浙江大学を卒業し、学士号と博士号を取得しました。 D. であり、現在はヨハネス ケプラーで研究を行っています。
自然界の多くの動物は素早く動くことができます– チーターやガゼルなど、動物が獲物を捕まえたり、捕食者から隠れたりするのにこれらの機能が使用されます。長年にわたり、同様の速度性能を備えた柔らかく柔軟なロボットを作成することが科学者の目標でしたが、応答が遅い、強度が低いなど、柔軟な素材に特有の欠点があるため、ほとんどのソフトロボットの動作は遅くなります。
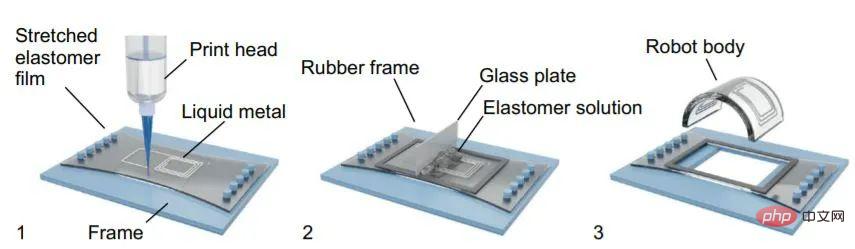
軟電磁エラストマーベースのロボット (SEMR) は、通常、応答が速く、小型化が容易です。軟電磁エラストマー アクチュエータは、弾性基板上に液体金属コイルを印刷することで作成できます。液体金属に電流を流すと、アクチュエータの動きを制御できます。
 #ロボットは胴体だけでなく、足のデザインも非常に重要です。形状の足は、紙、木、金属、プラスチック、ガラスなどのさまざまな平らな面で走行できます。しかし、チーターの爪が地面をしっかりと掴むのと同じように、足の素材と平らな面との間の摩擦が大きくなるほど、ロボットはより速く走ります。
#ロボットは胴体だけでなく、足のデザインも非常に重要です。形状の足は、紙、木、金属、プラスチック、ガラスなどのさまざまな平らな面で走行できます。しかし、チーターの爪が地面をしっかりと掴むのと同じように、足の素材と平らな面との間の摩擦が大きくなるほど、ロボットはより速く走ります。
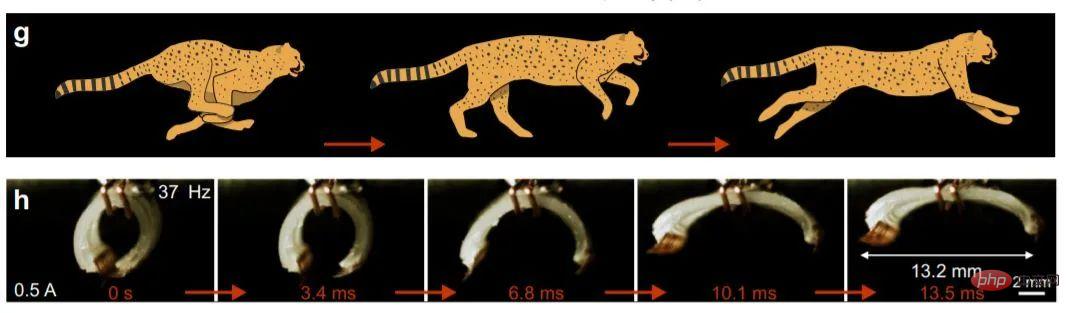
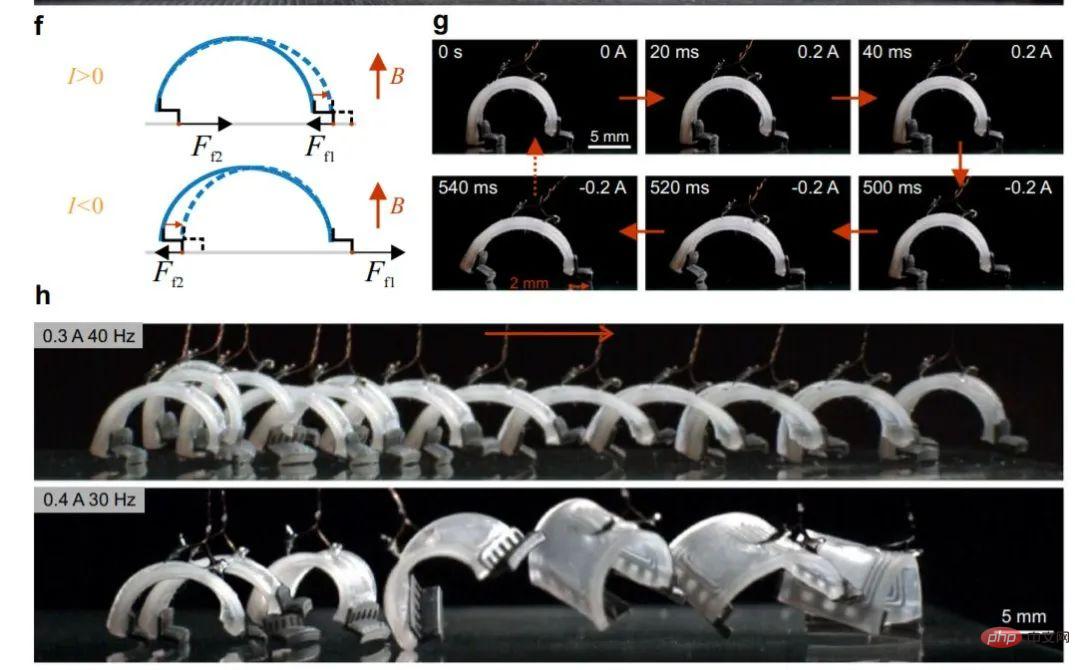 ロボットが展開すると、前足が前方に移動し、後足が機械的連動により固定され、その後ロボットが収縮し、前足が前方に移動します。足は固定されており、後ろの足は前方に引く方向に動きます。 3D 波形基板 (最適な平面) では 70 ボディ長/秒、その他の表面では平均 35 ボディ長/秒の超高速動作速度に達します。
ロボットが展開すると、前足が前方に移動し、後足が機械的連動により固定され、その後ロボットが収縮し、前足が前方に移動します。足は固定されており、後ろの足は前方に引く方向に動きます。 3D 波形基板 (最適な平面) では 70 ボディ長/秒、その他の表面では平均 35 ボディ長/秒の超高速動作速度に達します。
これまで、小型ロボットは外部電源システムによって駆動されていましたが、ロボットの「自由」をさらに実現するために、研究者らはロープを手放し、電源を供給する「小さなバッグ」を設置しました。ロボットの背中 - - カスタマイズされたバッテリー駆動のプリント基板 (PCB)。ランドセルを背負ったロボットは、以前ほど速くは動きませんが、それでも 2.1 体長/秒に達し、1.8 体長/秒の速度で泳ぐことができます。
#高速移動を超えて、多くの動物衝撃や落下に対する回復力、障害物を回避する能力、陸地と水中の境界を自由に越える能力、獲物を運ぶ能力など、より広範な生存戦略を持っています。
このロボットには、こうした機能も備わっており、研究者らは歩行中に重量物を乗せて平らにしたり、引張試験機でロボット本体を圧縮したりする耐久性試験を実施しました。最大 139 気圧 (本体では 2000 N) の圧縮応力に耐えることが判明しました。
回復力だけでは十分ではなく、障害物を克服することは、ほとんどの小型ロボットにとって依然として困難です。ロボットは、パルス状の電流信号を与えることで障害物を飛び越えることができ、体が縮んで傾き(エネルギーを蓄える)、圧縮されたバネのように伸びて(エネルギーを放出して)障害物を飛び越えます。
この小型ロボットは、陸上環境に加えて、その軽さを利用して泳ぐことも学びました。平均密度が比較的低いため、そのまま水に浮くことができ、方形波電流 (0.5 A、20 Hz) で駆動すると、ロボットは最大速度 43 mm/s または体長 4.8 mm/s で泳ぎます。将来的には改良が加えられ、魚のスピードに到達します。
ペーパーポータル:
https://www.nature.com/ 記事/s41467-022-32123-4
以上がチーターの2倍以上の速さです!浙江大学の卒業生がF1レーシングカーよりも速いソフトロボットを開発し、ネイチャーサブマガジンに掲載されたの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

















![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



