

画像翻訳用の 5 つの有望な AI モデル

画像間の変換
Solanki、Nayyar、および Naved が論文で提供した定義によれば、画像間の変換は、あるドメインから別のドメインに画像を変換するプロセスです。入力画像と出力画像の間のマッピングを学習することが目的です。
言い換えれば、モデルがマッピング関数 f を学習することで、ある画像 a を別の画像 b に変換できることを期待しています。
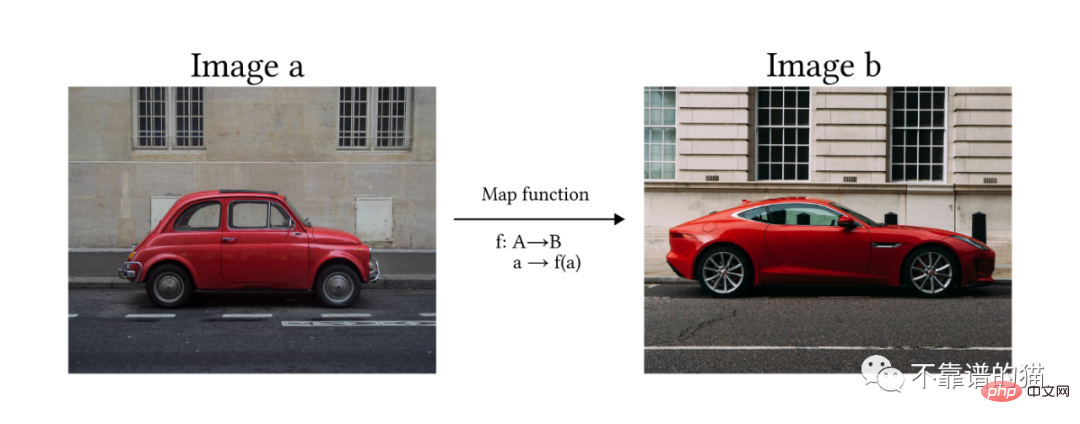
これらのモデルの用途や人工知能の世界との関連性について疑問に思う人もいるかもしれません。アートやグラフィックデザインに限定されず、多くの用途がある傾向があります。たとえば、画像を撮影し、それを別の画像に変換して合成データ (セグメント化された画像など) を作成できることは、自動運転車のモデルをトレーニングするのに非常に役立ちます。テスト済みのもう 1 つのアプリケーションは地図デザインです。モデルは両方の変換 (航空写真から地図へ、またはその逆) を実行できます。画像反転変換は建築にも適用でき、モデルは未完成のプロジェクトを完了する方法について推奨を行います。
画像変換の最も魅力的なアプリケーションの 1 つは、単純な描画を美しい風景や絵画に変換することです。
5 画像翻訳に最も有望な AI モデル
ここ数年にわたり、生成モデルを活用して画像間の翻訳の問題を解決するためのいくつかの方法が開発されてきました。最も一般的に使用される方法は、次のアーキテクチャに基づいています:
- 敵対的生成ネットワーク (GAN)
- バリエーション オートエンコーダー (VAE)
- 拡散モデル (DVAE)
- Transformers
Pix2Pix
Pix2Pix は、条件付き GAN ベースのモデルです。これは、そのアーキテクチャが Generator network (G) と Discriminator (D) で構成されていることを意味します。どちらのネットワークも敵対的ゲームでトレーニングされます。G の目標はデータセットに似た新しい画像を生成することであり、D は画像が生成されたもの (偽) かデータセットから生成されたもの (真) かを決定する必要があります。
Pix2Pix と他の GAN モデルの主な違いは次のとおりです: (1) 最初のジェネレーターは生成プロセスを開始するために画像を入力として受け取りますが、通常の GAN はランダム ノイズを使用します; (2) Pix2Pix は完全に監視されていますこれは、データセットが 2 つのドメインの画像のペアで構成されていることを意味します。
この論文で説明されているアーキテクチャは、ジェネレーター用の U-Net と、識別器用のマルコフ識別器またはパッチ識別器によって定義されています:
- U-Net: 2 つで構成されます。モジュール (ダウンサンプリングとアップサンプリング)。入力画像は畳み込み層を使用して小さな画像のセット (特徴マップと呼ばれる) に縮小され、元の入力次元に達するまで転置畳み込みによってアップサンプリングされます。ダウンサンプリングとアップサンプリングの間にはスキップ接続があります。
- Patch Discriminator: 畳み込みネットワーク。その出力は行列で、各要素は画像の一部 (パッチ) の評価結果です。これには、生成されたイメージと実際のイメージの間の L1 距離が含まれており、ジェネレーターが入力イメージを考慮して正しい関数をマッピングすることを確実に学習します。異なるパッチのピクセルが独立しているという前提に基づいているため、マルコフとも呼ばれます。
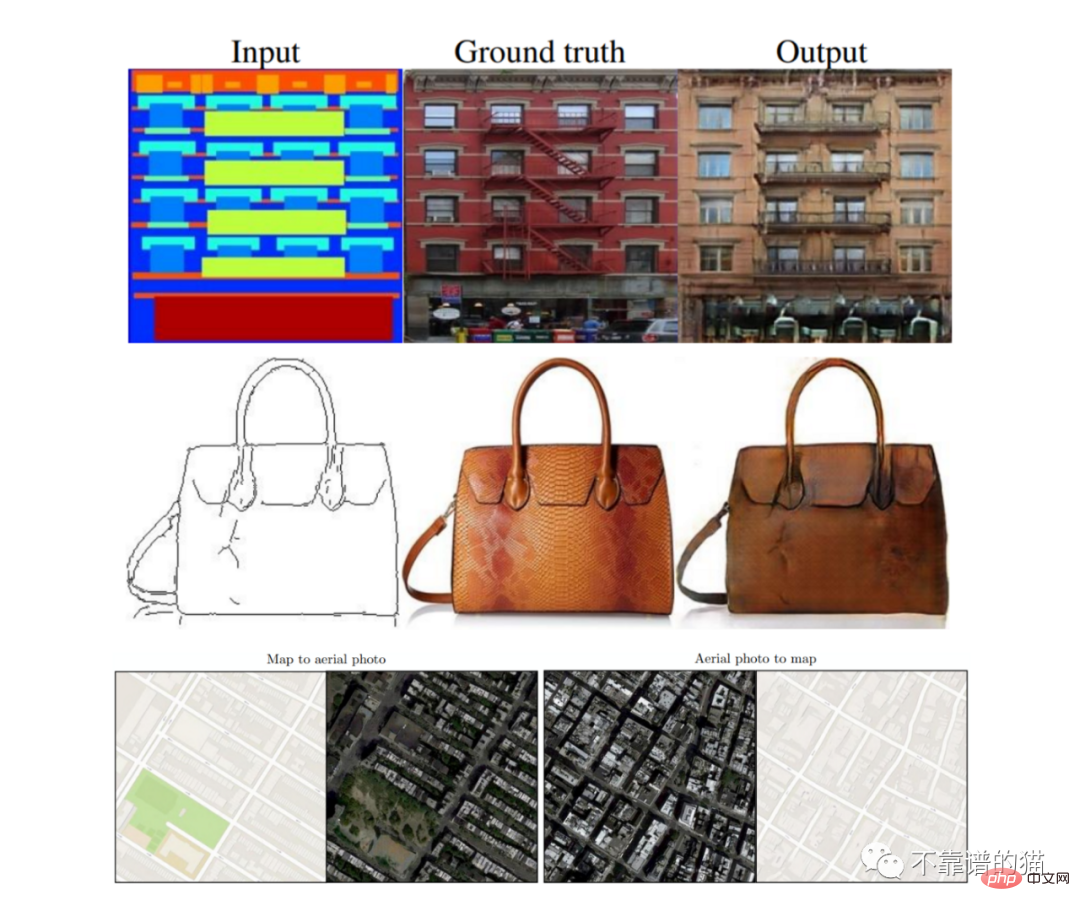
Pix2Pix の結果
教師なし画像から画像への変換 (UNIT)
Pix2Pix では、トレーニング プロセスは完全に監視されています (つまり、画像入力のペアが必要です)。 UNIT メソッドの目的は、2 つのペアの画像でトレーニングせずに、画像 A を画像 B にマッピングする関数を学習することです。
モデルは、2 つのドメイン (A と B) が共通の潜在空間 (Z) を共有すると仮定することから始まります。直観的には、この潜在空間はイメージ ドメイン A と B の間の中間段階と考えることができます。したがって、絵画から画像への例を使用すると、同じ潜在空間を使用して絵画画像を後方に生成したり、素晴らしい画像を前方に表示したりすることができます (図 X を参照)。
図中: (a) 共有潜在空間。 (b) UNIT アーキテクチャ: X1 はピクチャ、G2 ジェネレータ、D1、D2 ディスクリミネータです。破線はネットワーク間の共有レイヤーを表します。
UNIT モデルは、エンコーダーの最後の層 (E1、E2) とジェネレーターの最初の層 (G1、G2) が共有される VAE-GAN アーキテクチャのペア (上記を参照) に基づいて開発されます。
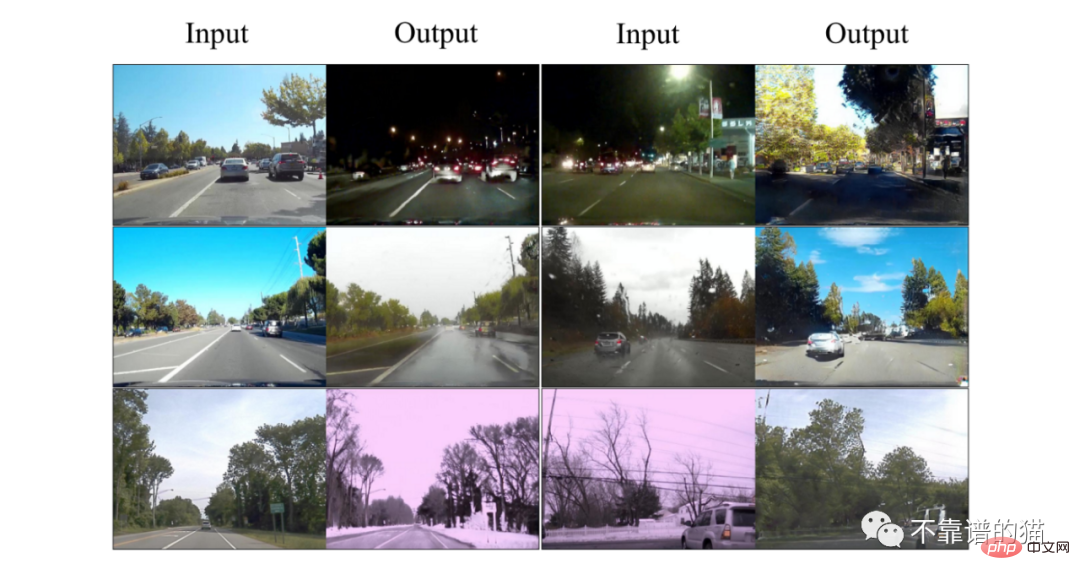
UNIT の結果
Palette
Palette は、カナダの Google 研究チームによって開発された条件付き拡散モデルです。モデルは、画像変換に関連する 4 つの異なるタスクを実行するようにトレーニングされ、高品質の結果が得られます。
(i) カラー化: グレースケール画像に色を追加します。
(ii) 修復: 色を塗りつぶします。リアルなコンテンツを含むユーザー指定の画像領域
(iii)切り抜き解除: 画像フレームの拡大
(iv)JPEG 回復:破損した JPEG 画像の回復
この論文では、著者らはマルチタスクの一般モデルと複数の特殊モデルの違いを調査しており、どちらも 100 万回の反復でトレーニングされています。モデルのアーキテクチャは、Dhariwal and Nichol 2021 のクラス条件付き U-Net モデルに基づいており、100 万のトレーニング ステップに対して 1024 画像のバッチ サイズを使用します。ノイズ プランをハイパーパラメータとして前処理および調整し、トレーニングと予測にさまざまなプランを使用します。
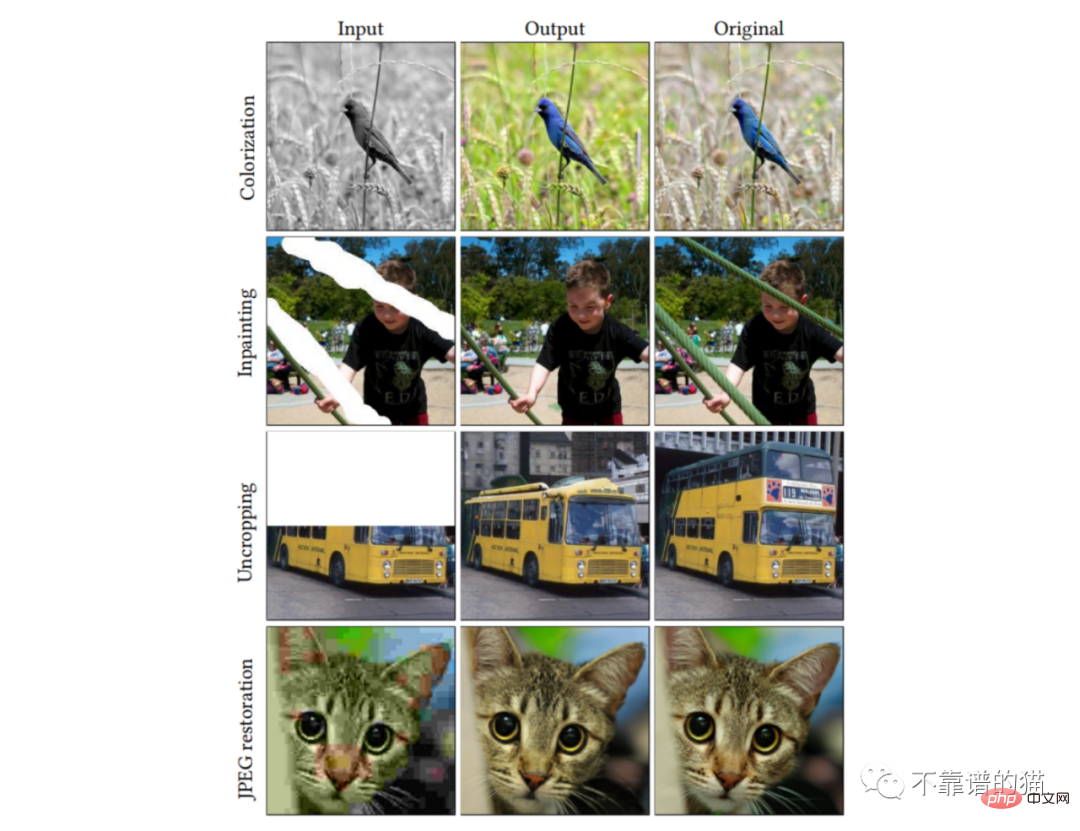
パレットの結果
ビジョン トランスフォーマー (ViT)
次の 2 つのモデルは画像変換用に特別に設計されたものではないことに注意してください。しかし、それらは、変圧器のような強力なモデルをコンピュータ ビジョンの分野に持ち込む上で明らかな前進です。
Vision Transformers (ViT) は、Transformers アーキテクチャ (Vaswani et al.、2017) を修正したもので、画像分類のために開発されました。モデルは画像を入力として受け取り、定義された各クラスに属する確率を出力します。
主な問題は、Transformer が 2 次元行列ではなく 1 次元シーケンスを入力として受け取るように設計されていることです。著者らは、並べ替えの際、画像を小さなチャンクに分割し、画像をシーケンス (または NLP の文) として、チャンクをトークン (または単語) として考えることを推奨しています。
簡単にまとめると、プロセス全体を 3 つの段階に分けることができます。
1) 埋め込み: 小さな部分を分割して平坦化する → 線形変換を適用する → クラス タグを追加する (このタグは画像として分類時に考慮される概要)→Position Embedding
2) Transformer-Encoder ブロック: 埋め込まれたパッチを一連の Transformer Encoder ブロックに配置します。注意メカニズムは、画像のどの部分に焦点を当てるかを学習します。
3) 分類 MLP ヘッダー: MLP ヘッダーを通じてクラス トークンを渡し、画像が各クラスに属する最終確率を出力します。
ViT を使用する利点: 配置は変更されません。 CNN と比較して、Transformer は画像内の移動 (要素の位置の変更) の影響を受けません。
欠点: トレーニングには大量のラベル付きデータが必要です (少なくとも 1,400 万の画像)
TransGAN
TransGAN は、画像生成と画像生成のために設計された変換ベースの GAN モデルです。畳み込み層は使用しません。代わりに、ジェネレーターとディスクリミネーターは、アップサンプリング ブロックとダウンサンプリング ブロックによって接続された一連のトランスフォーマーで構成されています。
ジェネレーターのフォワード パスは、ランダム ノイズ サンプルの 1 次元配列を取得し、MLP に渡します。直観的には、配列を文、ピクセル値を単語と考えることができます (64 要素の配列は 1 チャンネルの 8✕8 画像に再形成できることに注意してください)。次に、著者は一連の Transformer を適用します。ブロックの後に、配列 (画像) のサイズを 2 倍にするアップサンプリング レイヤーが続きます。
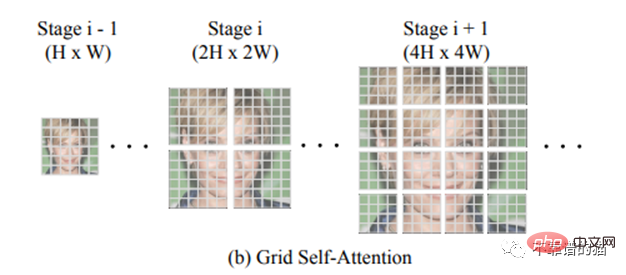
TransGAN の重要な機能は、グリッドセルフアテンションです。高次元の画像 (つまり、非常に長い配列 32✕32 = 1024) に到達する場合、1024 配列の各ピクセルを 255 個の可能なピクセルすべてと比較する必要があるため、トランスフォーマーを適用するとセルフ アテンション メカニズムのコストが爆発的に増加する可能性があります ( RGB 次元)。したがって、グリッド セルフ アテンションは、特定のトークンと他のすべてのトークンの間の対応を計算する代わりに、全次元の特徴マップをいくつかの重複しないグリッドに分割し、各ローカル グリッドでのトークンの相互作用を計算します。
識別器のアーキテクチャは、前に引用した ViT と非常によく似ています。
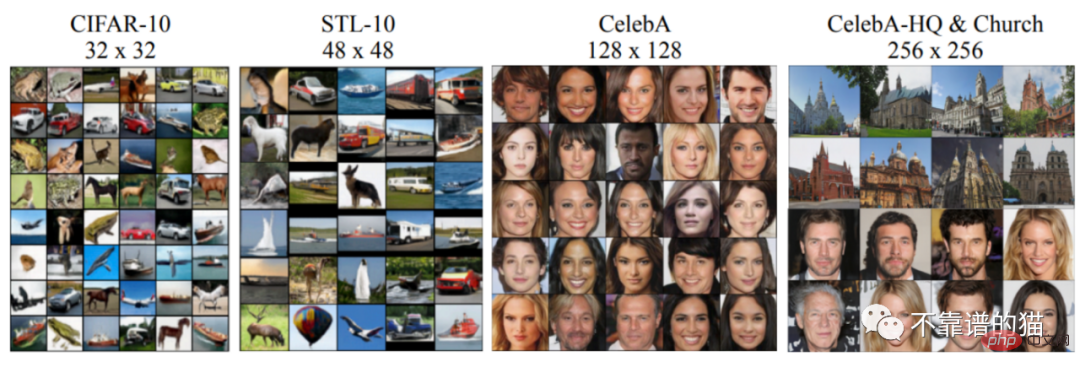
さまざまなデータセットでの TransGAN の結果
以上が画像翻訳用の 5 つの有望な AI モデルの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7563
7563
 15
1384
52
84
11
28
99
15
1384
52
84
11
28
99

 Bytedance Cutting が SVIP スーパー メンバーシップを開始: 継続的な年間サブスクリプションは 499 元で、さまざまな AI 機能を提供
Jun 28, 2024 am 03:51 AM
Bytedance Cutting が SVIP スーパー メンバーシップを開始: 継続的な年間サブスクリプションは 499 元で、さまざまな AI 機能を提供
Jun 28, 2024 am 03:51 AM
このサイトは6月27日、JianyingはByteDanceの子会社であるFaceMeng Technologyによって開発されたビデオ編集ソフトウェアであり、Douyinプラットフォームに依存しており、基本的にプラットフォームのユーザー向けに短いビデオコンテンツを作成すると報告しました。 Windows、MacOS、その他のオペレーティング システム。 Jianyingは会員システムのアップグレードを正式に発表し、インテリジェント翻訳、インテリジェントハイライト、インテリジェントパッケージング、デジタルヒューマン合成などのさまざまなAIブラックテクノロジーを含む新しいSVIPを開始しました。価格的には、クリッピングSVIPの月額料金は79元、年会費は599元(当サイト注:月額49.9元に相当)、継続月額サブスクリプションは月額59元、継続年間サブスクリプションは、年間499元(月額41.6元に相当)です。さらに、カット担当者は、ユーザーエクスペリエンスを向上させるために、オリジナルのVIPに登録している人は、
 Rag と Sem-Rag を使用したコンテキスト拡張 AI コーディング アシスタント
Jun 10, 2024 am 11:08 AM
Rag と Sem-Rag を使用したコンテキスト拡張 AI コーディング アシスタント
Jun 10, 2024 am 11:08 AM
検索強化生成およびセマンティック メモリを AI コーディング アシスタントに組み込むことで、開発者の生産性、効率、精度を向上させます。 JanakiramMSV 著者の EnhancingAICodingAssistantswithContextUsingRAGandSEM-RAG から翻訳。基本的な AI プログラミング アシスタントは当然役に立ちますが、ソフトウェア言語とソフトウェア作成の最も一般的なパターンに関する一般的な理解に依存しているため、最も適切で正しいコードの提案を提供できないことがよくあります。これらのコーディング アシスタントによって生成されたコードは、彼らが解決する責任を負っている問題の解決には適していますが、多くの場合、個々のチームのコーディング標準、規約、スタイルには準拠していません。これにより、コードがアプリケーションに受け入れられるように修正または調整する必要がある提案が得られることがよくあります。
 微調整によって本当に LLM が新しいことを学習できるようになるのでしょうか: 新しい知識を導入すると、モデルがより多くの幻覚を生成する可能性があります
Jun 11, 2024 pm 03:57 PM
微調整によって本当に LLM が新しいことを学習できるようになるのでしょうか: 新しい知識を導入すると、モデルがより多くの幻覚を生成する可能性があります
Jun 11, 2024 pm 03:57 PM
大規模言語モデル (LLM) は巨大なテキスト データベースでトレーニングされ、そこで大量の現実世界の知識を取得します。この知識はパラメータに組み込まれており、必要なときに使用できます。これらのモデルの知識は、トレーニングの終了時に「具体化」されます。事前トレーニングの終了時に、モデルは実際に学習を停止します。モデルを調整または微調整して、この知識を活用し、ユーザーの質問により自然に応答する方法を学びます。ただし、モデルの知識だけでは不十分な場合があり、モデルは RAG を通じて外部コンテンツにアクセスできますが、微調整を通じてモデルを新しいドメインに適応させることが有益であると考えられます。この微調整は、ヒューマン アノテーターまたは他の LLM 作成物からの入力を使用して実行され、モデルは追加の実世界の知識に遭遇し、それを統合します。
 GenAI および LLM の技術面接に関する 7 つのクールな質問
Jun 07, 2024 am 10:06 AM
GenAI および LLM の技術面接に関する 7 つのクールな質問
Jun 07, 2024 am 10:06 AM
AIGC について詳しくは、51CTOAI.x コミュニティ https://www.51cto.com/aigc/Translator|Jingyan Reviewer|Chonglou を参照してください。これらの質問は、インターネット上のどこでも見られる従来の質問バンクとは異なります。既成概念にとらわれずに考える必要があります。大規模言語モデル (LLM) は、データ サイエンス、生成人工知能 (GenAI)、および人工知能の分野でますます重要になっています。これらの複雑なアルゴリズムは人間のスキルを向上させ、多くの業界で効率とイノベーションを推進し、企業が競争力を維持するための鍵となります。 LLM は、自然言語処理、テキスト生成、音声認識、推奨システムなどの分野で幅広い用途に使用できます。 LLM は大量のデータから学習することでテキストを生成できます。
 あなたが知らない機械学習の 5 つの流派
Jun 05, 2024 pm 08:51 PM
あなたが知らない機械学習の 5 つの流派
Jun 05, 2024 pm 08:51 PM
機械学習は人工知能の重要な分野であり、明示的にプログラムしなくてもコンピューターにデータから学習して能力を向上させる機能を提供します。機械学習は、画像認識や自然言語処理から、レコメンデーションシステムや不正行為検出に至るまで、さまざまな分野で幅広く応用されており、私たちの生活様式を変えつつあります。機械学習の分野にはさまざまな手法や理論があり、その中で最も影響力のある 5 つの手法は「機械学習の 5 つの流派」と呼ばれています。 5 つの主要な学派は、象徴学派、コネクショニスト学派、進化学派、ベイジアン学派、およびアナロジー学派です。 1. 象徴主義は、象徴主義とも呼ばれ、論理的推論と知識の表現のためのシンボルの使用を強調します。この学派は、学習は既存の既存の要素を介した逆演繹のプロセスであると信じています。
 新しい科学的で複雑な質問応答ベンチマークと大規模モデルの評価システムを提供するために、UNSW、アルゴンヌ、シカゴ大学、およびその他の機関が共同で SciQAG フレームワークを立ち上げました。
Jul 25, 2024 am 06:42 AM
新しい科学的で複雑な質問応答ベンチマークと大規模モデルの評価システムを提供するために、UNSW、アルゴンヌ、シカゴ大学、およびその他の機関が共同で SciQAG フレームワークを立ち上げました。
Jul 25, 2024 am 06:42 AM
編集者 |ScienceAI 質問応答 (QA) データセットは、自然言語処理 (NLP) 研究を促進する上で重要な役割を果たします。高品質の QA データ セットは、モデルの微調整に使用できるだけでなく、大規模言語モデル (LLM) の機能、特に科学的知識を理解し推論する能力を効果的に評価することもできます。現在、医学、化学、生物学、その他の分野をカバーする多くの科学 QA データ セットがありますが、これらのデータ セットにはまだいくつかの欠点があります。まず、データ形式は比較的単純で、そのほとんどが多肢選択式の質問であり、評価は簡単ですが、モデルの回答選択範囲が制限され、科学的な質問に回答するモデルの能力を完全にテストすることはできません。対照的に、自由回答型の Q&A
 SOTA パフォーマンス、厦門マルチモーダルタンパク質-リガンド親和性予測 AI 手法、初めて分子表面情報を結合
Jul 17, 2024 pm 06:37 PM
SOTA パフォーマンス、厦門マルチモーダルタンパク質-リガンド親和性予測 AI 手法、初めて分子表面情報を結合
Jul 17, 2024 pm 06:37 PM
編集者 | KX 医薬品の研究開発の分野では、タンパク質とリガンドの結合親和性を正確かつ効果的に予測することが、医薬品のスクリーニングと最適化にとって重要です。しかし、現在の研究では、タンパク質とリガンドの相互作用における分子表面情報の重要な役割が考慮されていません。これに基づいて、アモイ大学の研究者らは、初めてタンパク質の表面、3D 構造、配列に関する情報を組み合わせ、クロスアテンション メカニズムを使用して異なるモダリティの特徴を比較する、新しいマルチモーダル特徴抽出 (MFE) フレームワークを提案しました。アライメント。実験結果は、この方法がタンパク質-リガンド結合親和性の予測において最先端の性能を達成することを実証しています。さらに、アブレーション研究は、この枠組み内でのタンパク質表面情報と多峰性特徴の位置合わせの有効性と必要性を実証しています。 「S」で始まる関連研究
 SKハイニックスは8月6日に12層HBM3E、321層NANDなどのAI関連新製品を展示する。
Aug 01, 2024 pm 09:40 PM
SKハイニックスは8月6日に12層HBM3E、321層NANDなどのAI関連新製品を展示する。
Aug 01, 2024 pm 09:40 PM
8月1日の本サイトのニュースによると、SKハイニックスは本日(8月1日)ブログ投稿を発表し、8月6日から8日まで米国カリフォルニア州サンタクララで開催されるグローバル半導体メモリサミットFMS2024に参加すると発表し、多くの新世代の製品。フューチャー メモリおよびストレージ サミット (FutureMemoryandStorage) の紹介。以前は主に NAND サプライヤー向けのフラッシュ メモリ サミット (FlashMemorySummit) でしたが、人工知能技術への注目の高まりを背景に、今年はフューチャー メモリおよびストレージ サミット (FutureMemoryandStorage) に名前が変更されました。 DRAM およびストレージ ベンダー、さらに多くのプレーヤーを招待します。昨年発売された新製品SKハイニックス
