

チューリングマシンはディープラーニングで最も注目されているリカレントニューラルネットワークRNNですか? 1996 年の論文がそれを証明しました。

フィンランド人工知能協会とヴァーサ大学が主催するフィンランド人工知能カンファレンスは、1996 年 8 月 19 日から 23 日までフィンランドのヴァーサで開催されました。
カンファレンスで発表された論文は、チューリング マシンがリカレント ニューラル ネットワークであることを証明しました。
はい、これは 26 年前のことです。
1996 年に発表されたこの論文を見てみましょう。
1 はじめに
1.1 ニューラル ネットワークの分類
ニューラル ネットワークは、入力パターンが特定のカテゴリに属するかどうかを判断する分類タスクに使用できます。
単層フィードフォワード ネットワークは、線形分離可能なパターンの分類にのみ使用できること、つまり、層が連続するほど、クラスの分布が複雑になることは長い間知られていました。
ネットワーク構造にフィードバックが導入されると、パーセプトロンの出力値が再利用され、連続する層の数は原理的に無限になります。
コンピューティング能力は質的に向上しましたか?答えは「はい」です。
たとえば、入力整数が素数かどうかを判断する分類器を構築できます。
この目的に使用されるネットワークのサイズは有限であり、入力整数のサイズが制限されていない場合でも、正しく分類できる素数の数は次のとおりであることがわかります。無限。
この記事では、「同じ計算要素で構成される循環ネットワーク構造」を使用して、(アルゴリズム的に) 計算可能な関数を完成させることができます。
1.2 計算可能性について
計算可能性理論の基本公理によれば、チューリング マシンを使用して計算可能な関数を実装できます。チューリング マシンを実装するにはさまざまな方法があります。
プログラミング言語を定義します 。この言語には 4 つの基本的な演算があります。
。この言語には 4 つの基本的な演算があります。
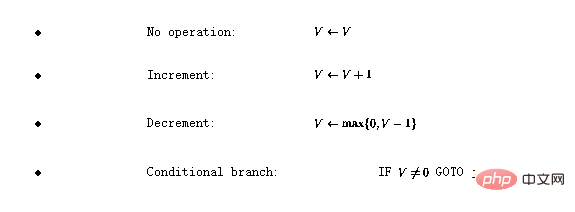
ここで、V は正の整数値を持つ変数、 j# を表します。 ## は任意の行番号を表します。
関数がチューリング計算可能である場合、この単純な言語を使用してエンコードできることがわかります (詳細については [1] を参照) 。
2 チューリング ネットワーク2.1 再帰的ニューラル ネットワークの構造この記事で研究するニューラル ネットワークはパーセプトロンで構成されており、そのすべてが同じパーセプトロン番号 q の構造は

と定義できますが、このうち現在のパーセプトロン出力はモーメント ( を使用) は、n 入力
を使用) は、n 入力  を使用して計算されます。
を使用して計算されます。
非線形関数 f は
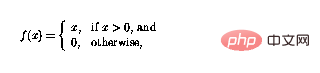
として定義できるようになりました。負の値を単に「カットオフ」するだけで、パーセプトロン ネットワーク内のループは、パーセプトロンを複雑な方法で組み合わせることができることを意味します。
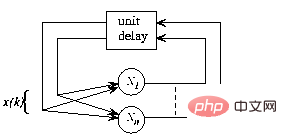
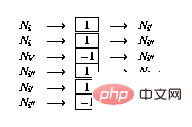
#図 1 リカレント ニューラル ネットワークの全体的なフレームワーク。構造は外部入力なしで自律的であり、ネットワークの動作は初期状態によって完全に決定されます。
図 1 では、再帰構造が一般的な枠組みで示されています。 と n はパーセプトロンの数であり、パーセプトロン p からパーセプトロンへの接続です。 q は #スカラー重み表現で与えられます。
と n はパーセプトロンの数であり、パーセプトロン p からパーセプトロンへの接続です。 q は #スカラー重み表現で与えられます。 
2.2 ニューラル ネットワークの構築
以下では、プログラムがどのようにパーセプトロン ネットワークに実装されるかを説明します。ネットワークは次のノード (またはパーセプトロン) で構成されます: プログラム内のすべての変数 V
プログラム内のすべての変数 V
- 。 各プログラム行 i
 には、命令ノード
には、命令ノード - があります。 行 i の条件付き分岐命令ごとに、2 つの追加分岐ノード
- および があります。 #言語
 には、命令ノード
には、命令ノード  の条件付き分岐命令ごとに、2 つの追加分岐ノード
の条件付き分岐命令ごとに、2 つの追加分岐ノード  #言語
#言語
 プログラムの場合 V
プログラムの場合 V
プログラム コードの場合  i
i
- ) がない場合は、次のリンクを使用してネットワークを拡張します (ノード が存在すると仮定します:


行  i
i
- ) がある場合は、次のようにネットワークを拡張します。 #################################
-
行 i にデクリメント操作 () がある場合は、次のようにネットワークを拡張します。
-
##i 行目に条件分岐 () がある場合は、次のようにネットワークを拡張します。
2.3 等価性の証明これから証明する必要があるのは、「ネットワークの内部状態またはネットワーク ノードの内容」が次のように識別できるということです。ネットワーク状態の継続性はプログラム フローに対応します。
ネットワークの「法的状態」を次のように定義します:
- すべての遷移ノード および (2.2 で定義) の出力はゼロ ();
- 最大 1命令ノード にはユニット出力 () があり、他のすべての命令ノードにはゼロ出力があり、
- 変数ノードの出力値は負ではない整数です。
すべての命令ノードの出力がゼロの場合、状態 が最終状態 になります。正当なネットワーク状態は、プログラムの「スナップショット」として直接解釈できます。 の場合、プログラム カウンターは i 行にあり、対応する変数値は次のようになります。変数ノードに格納されます。
ネットワーク ステータスの変化は、ゼロ以外のノードによってアクティブになります。
まず、変数ノードに注目すると、変数ノードはインテグレータのように動作し、ノードの前の内容が同じノードにループバックされることがわかります。
変数ノードから他のノードへの接続のみが負の重みを持ちます。非線形性 (2) のため、ゼロを含むノードは変化しません。
次に、命令ノードについて詳しく説明します。唯一の非ゼロ命令ノード が時刻 k---これは行 i のプログラム カウンタに対応すると仮定します。プログラムコード内で。
プログラムの i 行が の場合、ネットワークの動作が 1 歩前進する可能性があります。 (影響を受けたノードのみを表示)
新しいネットワーク状態が再び正当であることが判明しました。 。プログラム コードと比較すると、これはプログラム カウンタが i 1 行に移動することに対応します。
一方、プログラムの i 行目が
## となります。# の場合、1 ステップ進む動作は #このようにして、プログラム カウンタを次の行に移動するだけでなく、変数 V の値もデクリメントされます。行 i が
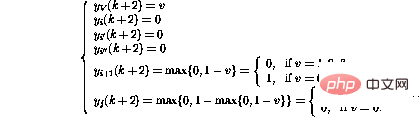
の場合、変数 V の値が増加することを除いて、ネットワークの動作は同じになります。 。 行 i の条件分岐操作 (IF
GOTO j) は、より複雑なシーケンスをアクティブにします。操作 :
##最終的に、
次のことが判明しました。これらのステップの後、ネットワーク状態は別のプログラムのスナップショットとして再び解釈できるようになります。変数値が変更され、対応するプログラム行が実行されたかのようにトークンが新しい場所に移動されました。
トークンが消えると、ネットワークの状態は変化しなくなります。これは、プログラム カウンタがプログラム コードを「超過」した場合、つまりプログラムが終了した場合にのみ発生します。
ネットワークの動作も対応するプログラムの動作と同様であり、証明は完了です。
3 変更
3.1 拡張機能プログラミングを容易にする追加の合理化された命令を簡単に定義できます。生成されたプログラムはより読みやすく、より高速に実行されます。たとえば、
## 行
- i
- の無条件分岐 (GOTO j) は、 # として実装できます。
##定数 c を i 行目の変数に追加します ( -
) は # として実装できます。
# 行の別の条件分岐 (IF V=0 GOTO j - ) は、# に対して達成できます。 さらに、さまざまなインクリメント/デクリメント命令を同時に評価できます。次の操作を実行するとします:
。必要なノードは 1 つだけです。 -
: 上記の方法は絶対に使用できません。チューリングマシンの唯一の実装を意味します。
これは単純な実装であり、アプリケーションでは必ずしも最適であるとは限りません。
3.2 行列の定式化
上記の構築は行列の形で実装することもできます。
基本的な考え方は、変数値と「プログラム カウンタ」をプロセス状態 s
に保存し、状態遷移行列A を使用することです。間のノードリンクを表します。
マトリックス構造の操作は、離散時間の動的プロセスとして定義できます
ここで、非線形ベクトル値関数
は (2) のように要素ごとに定義されます。 状態遷移行列Aの内容はネットワーク公式から簡単に解読できます。行列要素はノード間の重みです。
この行列式は、[3] で提案されている「概念行列」フレームワークに似ています。
4 例
単純な関数 y=x を実装するとします。つまり、変数 x# の値を入力します。 ## 出力変数 y に渡す必要があります。
# 言語を使用すると、これは次のようにエンコードできます (そのため、「エントリ ポイント」は 1 行目ではなく 3 行目になります): 生成されたパーセプトロン ネットワークを図 2 に示します。
実線は正の接続 (重みは 1) を表し、点線は負の接続 (重みは -1) を表します。 )。図 1 と比較すると、ネットワーク構造はノードに遅延要素を統合することによって再描画され、簡素化されています。
#図 2 単純なプログラムのネットワーク実装
マトリックス形式、上記のプログラムは次のようになります。行列 A の最初の 2 つの行/列は、を表すために接続された変数に対応します。ノード Y および #XX への 2 つのリンク。次の 3 行は 3 つのプログラム行 (1、2、および 3) を表し、最後の 2 行は分岐に必要な追加ノードを表します。命令 (3 ' および 3'')。 次に、初期状態 (反復前) と最終状態 (反復後、固定点が見つかったとき) があります。
変数ノードの値が厳密に 0 と 1 の間に維持される場合、動的システム (3) の動作は線形になり、関数まったく効果がありません。 原則として、線形システム理論を解析に使用できます。
例えば、図3には、状態遷移行列
Aの固有値が示されている。 上記の例で単位円の外側に固有値がある場合でも、非線形性により反復は常に安定します。
反復は、
ステップ (
) の後で常に収束することがわかります。 図3 簡単なプログラムの「特性値」5 考察
5.1 理論的側面
結果は、チューリング マシンをパーセプトロン ネットワークとしてエンコードできることを示しています。
定義上、すべての計算可能な関数はチューリング計算可能です。計算可能性理論の枠組み内では、これ以上強力な計算システムは存在しません。
これが、結論付けることができる理由です -
リカレント パーセプトロン ネットワーク (上に表示) はチューリング マシンです (まだ別の)形式。
この等価性の利点は、計算可能性理論の結果が簡単に得られることです。たとえば、ネットワークと初期状態が与えられた場合、プロセスを判断することは不可能です。やがて止まるのだろうか。
上記の理論的等価性は、計算効率については何も述べていません。
ネットワーク内で発生するさまざまなメカニズムにより、従来のチューリング マシン実装 (実際には今日のコンピューター) と比較して、このフレームワークで一部の機能をより適切に実装できるようになります。
# 少なくとも場合によっては、たとえば、スナップショット ベクトルで複数の 「プログラム カウンター」を許可することで、アルゴリズムのネットワーク実装を並列化できます。
ネットワークの運用は厳密にローカルであり、グローバルではありません。
たとえば、NP 完全問題をネットワーク環境でより効果的に攻撃できるかどうかなど、興味深い疑問が生じます。
#言語と比較して、ネットワーク実装には次の「拡張機能」があります:
# #変数 整数値だけでなく、連続値も使用できます。実際、実数を表現する (理論上の) 能力により、ネットワーク実装は、表現されるすべての数値が有理数である - 言語よりも強力になります。 さまざまな「プログラム カウンタ」が同時に存在する可能性があり、制御の転送が「あいまい」になる可能性があります。つまり、命令ノードによって提供されるプログラム カウンタ値は、非整数。
- #小規模な拡張機能は、自由に定義できるプログラム エントリ ポイントです。これはプログラムを簡素化するのに役立ちます。たとえば、変数のコピーは上記の 3 つのプログラム行で行われますが、公称ソリューション ([1] を参照) では 7 行と追加のローカル変数が必要です。
- 元のプログラム コードと比較すると、行列式は明らかにプログラム コードよりも「連続した」情報表現です。パラメーターは (頻繁に) 変更できますが、反復結果が突然変わることはありません。
この「冗長性」は、一部のアプリケーションでは役立つ場合があります。
たとえば、構造の最適化に遺伝的アルゴリズム (GA) を使用する場合、遺伝的アルゴリズムで使用されるランダム検索戦略をより効率的にすることができます。コストを検索することができます。関数の局所最小値は、いくつかの伝統的な手法を使用します ([4] を参照)。
[5] で説明されているように、例を通じて有限状態マシンの構造を学習すると、ネットワーク構造を反復的に強化する方法が、このより複雑な状況でも使用されることがわかります。 。
ニューラル ネットワーク理論だけが上記の結果から恩恵を受けるわけではありません。動的システムの公式 (3) を見るだけで、計算可能性理論の分野で見られるすべての現象も同様であることは明らかです。簡単に言えば、フォームが存在する - 非線形の動的プロセスを探しているということです。
たとえば、停止問題の決定不可能性は、システム理論の分野への興味深い貢献です。チューリング マシンとして表されるあらゆる決定プロセスに対して、このプロセスに違反する形式 (3) の動的システムが存在します。 - たとえば、一般的な安定性解析アルゴリズムを構築することはできません。
5.2 関連研究
提示されたネットワーク構造と再帰的ホップフィールド ニューラル ネットワーク パラダイムの間にはいくつかの類似点があります (例: [2] を参照) )。
どちらの場合も、「入力」はネットワークの初期状態としてエンコードされ、「出力」は反復後のネットワークの最終状態から読み取られます。
ホップフィールド ネットワークの固定点は、事前にプログラムされたパターン モデルであり、入力は「ノイズ」パターンです。このネットワークは、損傷したパターンを強化するために使用できます。
# の非線形関数の見通し (2) により、上記の「チューリング ネットワーク」の可能な状態の数は無限になります。 ユニット出力が常に -1 または 1 であるホップフィールド ネットワークと比較すると、理論的には、これらのネットワーク構造が大きく異なることがわかります。
たとえば、ホップフィールド ネットワークの安定点のセットは限られていますが、チューリング ネットワークで表されるプログラムでは、多くの場合、無限の結果が考えられます。
ホップフィールド ネットワークの計算能力については、[6] で説明されています。
ペトリ ネットは、イベントベースの同時システム モデリングのための強力なツールです [7]。
ペトリ ネットは、ビットと遷移、およびそれらを接続するアークで構成されます。各場所には任意の数のトークンを含めることができ、トークンの配布はペトリ ネットのマークと呼ばれます。
変換のすべての入力位置がマーカーで占められている場合、変換がトリガーされ、各入力位置からマーカーが削除され、各出力位置にマーカーが追加されます。
追加の抑制アークを備えた拡張ペトリ ネットにもチューリング マシンの機能があることが証明できます ([7] を参照)。
上記のチューリング ネットとペトリ ネットの主な違いは、ペトリ ネットのフレームワークがより複雑で、単純な一般形式では表現できない特別にカスタマイズされた構造を持っていることです。 (3)。
参考文献
1 Davis, M.およびWeyuker, E.: 計算可能性、 Complexity, and Languages---Fundamentals of Theoretical Computer Science. Academic Press, New York, 1983.
2 Haykin, S.: Neural Networks. A Comprehensive Foundation. Macmillan College Publishing,ニューヨーク、1994.
3 Hyötyniemi, H.: 相関関係 --- 知能の構成要素? Älyn ulotuvuudet ja oppihistoria (知能の歴史と次元)、フィンランド人工知能協会、 1995、pp. 199--226.
4 Hyötyniemi, H. およびコイヴォ, H.: 遺伝子、コード、および動的システム. 遺伝的アルゴリズムに関する第 2 回ノルディック ワークショップの議事録(NWGA'96)、フィンランド、ヴァーサ、1996 年 8 月 19 ~ 23 日。
5 Manolios, P. および Fanelli, R.: 1 次リカレント ニューラル ネットワークと決定論的有限State Automata. Neural Computation 6、1994、pp. 1155--1173.
6 Orponen, P.: The Computational Power of Discrete Hopfield Nets with Hidden Units. Neural Computation 8、1996 、pp. 403--415.
7 Peterson, J.L.: ペトリ ネット理論とシステムのモデリング. プレンティス -- ホール、ニュージャージー州イングルウッド クリフス、1981.
参考資料:
-
行 i にデクリメント操作 (
 ) がある場合は、次のようにネットワークを拡張します。
) がある場合は、次のようにネットワークを拡張します。 
 および
および  (2.2 で定義) の出力はゼロ (
(2.2 で定義) の出力はゼロ ( );
);
 にはユニット出力 (
にはユニット出力 ( ) があり、他のすべての命令ノードにはゼロ出力があり、
) があり、他のすべての命令ノードにはゼロ出力があり、



 の場合、変数
の場合、変数  GOTO
GOTO 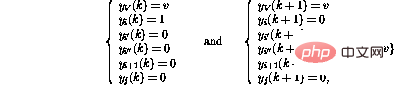


 # 言語を使用すると、これは次のようにエンコードできます (そのため、「エントリ ポイント」は 1 行目ではなく 3 行目になります):
# 言語を使用すると、これは次のようにエンコードできます (そのため、「エントリ ポイント」は 1 行目ではなく 3 行目になります): 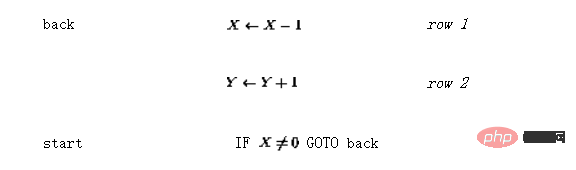
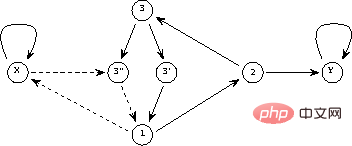


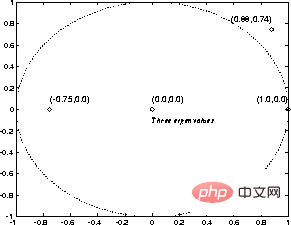 図3 簡単なプログラムの「特性値」
図3 簡単なプログラムの「特性値」 # #変数 整数値だけでなく、連続値も使用できます。実際、実数を表現する (理論上の) 能力により、ネットワーク実装は、表現されるすべての数値が有理数である
# #変数 整数値だけでなく、連続値も使用できます。実際、実数を表現する (理論上の) 能力により、ネットワーク実装は、表現されるすべての数値が有理数である 
 # の非線形関数の見通し (2) により、上記の「チューリング ネットワーク」の可能な状態の数は無限になります。
# の非線形関数の見通し (2) により、上記の「チューリング ネットワーク」の可能な状態の数は無限になります。 以上がチューリングマシンはディープラーニングで最も注目されているリカレントニューラルネットワークRNNですか? 1996 年の論文がそれを証明しました。の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7517
7517
 15
1378
52
79
11
21
66
15
1378
52
79
11
21
66

 Python での感情分析に BERT を使用する方法と手順
Jan 22, 2024 pm 04:24 PM
Python での感情分析に BERT を使用する方法と手順
Jan 22, 2024 pm 04:24 PM
BERT は、2018 年に Google によって提案された事前トレーニング済みの深層学習言語モデルです。正式名は BidirectionEncoderRepresentationsfromTransformers で、Transformer アーキテクチャに基づいており、双方向エンコードの特性を備えています。従来の一方向コーディング モデルと比較して、BERT はテキストを処理するときにコンテキスト情報を同時に考慮できるため、自然言語処理タスクで優れたパフォーマンスを発揮します。その双方向性により、BERT は文内の意味関係をより深く理解できるようになり、それによってモデルの表現能力が向上します。事前トレーニングおよび微調整方法を通じて、BERT は感情分析、命名などのさまざまな自然言語処理タスクに使用できます。
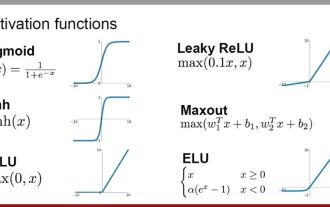 一般的に使用される AI 活性化関数の分析: Sigmoid、Tanh、ReLU、Softmax のディープラーニングの実践
Dec 28, 2023 pm 11:35 PM
一般的に使用される AI 活性化関数の分析: Sigmoid、Tanh、ReLU、Softmax のディープラーニングの実践
Dec 28, 2023 pm 11:35 PM
活性化関数は深層学習において重要な役割を果たしており、ニューラル ネットワークに非線形特性を導入することで、ネットワークが複雑な入出力関係をより適切に学習し、シミュレートできるようになります。活性化関数の正しい選択と使用は、ニューラル ネットワークのパフォーマンスとトレーニング結果に重要な影響を与えます。この記事では、よく使用される 4 つの活性化関数 (Sigmoid、Tanh、ReLU、Softmax) について、導入、使用シナリオ、利点、欠点と最適化ソリューション アクティベーション関数を包括的に理解できるように、次元について説明します。 1. シグモイド関数 シグモイド関数の公式の概要: シグモイド関数は、任意の実数を 0 と 1 の間にマッピングできる一般的に使用される非線形関数です。通常は統一するために使用されます。
 ORB-SLAM3を超えて! SL-SLAM: 低照度、重度のジッター、弱いテクスチャのシーンはすべて処理されます。
May 30, 2024 am 09:35 AM
ORB-SLAM3を超えて! SL-SLAM: 低照度、重度のジッター、弱いテクスチャのシーンはすべて処理されます。
May 30, 2024 am 09:35 AM
以前に書きましたが、今日は、深層学習テクノロジーが複雑な環境におけるビジョンベースの SLAM (同時ローカリゼーションとマッピング) のパフォーマンスをどのように向上させることができるかについて説明します。ここでは、深部特徴抽出と深度マッチング手法を組み合わせることで、低照度条件、動的照明、テクスチャの弱い領域、激しいセックスなどの困難なシナリオでの適応を改善するように設計された多用途のハイブリッド ビジュアル SLAM システムを紹介します。当社のシステムは、拡張単眼、ステレオ、単眼慣性、ステレオ慣性構成を含む複数のモードをサポートしています。さらに、他の研究にインスピレーションを与えるために、ビジュアル SLAM と深層学習手法を組み合わせる方法も分析します。公開データセットと自己サンプリングデータに関する広範な実験を通じて、測位精度と追跡堅牢性の点で SL-SLAM の優位性を実証しました。
 潜在空間の埋め込み: 説明とデモンストレーション
Jan 22, 2024 pm 05:30 PM
潜在空間の埋め込み: 説明とデモンストレーション
Jan 22, 2024 pm 05:30 PM
潜在空間埋め込み (LatentSpaceEmbedding) は、高次元データを低次元空間にマッピングするプロセスです。機械学習と深層学習の分野では、潜在空間埋め込みは通常、高次元の入力データを低次元のベクトル表現のセットにマッピングするニューラル ネットワーク モデルです。このベクトルのセットは、「潜在ベクトル」または「潜在ベクトル」と呼ばれることがよくあります。エンコーディング」。潜在空間埋め込みの目的は、データ内の重要な特徴をキャプチャし、それらをより簡潔でわかりやすい形式で表現することです。潜在空間埋め込みを通じて、低次元空間でデータの視覚化、分類、クラスタリングなどの操作を実行し、データをよりよく理解して活用できます。潜在空間埋め込みは、画像生成、特徴抽出、次元削減など、多くの分野で幅広い用途があります。潜在空間埋め込みがメイン
 1 つの記事で理解: AI、機械学習、ディープラーニングのつながりと違い
Mar 02, 2024 am 11:19 AM
1 つの記事で理解: AI、機械学習、ディープラーニングのつながりと違い
Mar 02, 2024 am 11:19 AM
今日の急速な技術変化の波の中で、人工知能 (AI)、機械学習 (ML)、および深層学習 (DL) は輝かしい星のようなもので、情報技術の新しい波をリードしています。これら 3 つの単語は、さまざまな最先端の議論や実践で頻繁に登場しますが、この分野に慣れていない多くの探検家にとって、その具体的な意味や内部のつながりはまだ謎に包まれているかもしれません。そこで、まずはこの写真を見てみましょう。ディープラーニング、機械学習、人工知能の間には密接な相関関係があり、進歩的な関係があることがわかります。ディープラーニングは機械学習の特定の分野であり、機械学習
 超強い!深層学習アルゴリズムのトップ 10!
Mar 15, 2024 pm 03:46 PM
超強い!深層学習アルゴリズムのトップ 10!
Mar 15, 2024 pm 03:46 PM
2006 年にディープ ラーニングの概念が提案されてから、ほぼ 20 年が経過しました。ディープ ラーニングは、人工知能分野における革命として、多くの影響力のあるアルゴリズムを生み出してきました。では、ディープラーニングのトップ 10 アルゴリズムは何だと思いますか?私の考えでは、ディープ ラーニングのトップ アルゴリズムは次のとおりで、いずれもイノベーション、アプリケーションの価値、影響力の点で重要な位置を占めています。 1. ディープ ニューラル ネットワーク (DNN) の背景: ディープ ニューラル ネットワーク (DNN) は、多層パーセプトロンとも呼ばれ、最も一般的なディープ ラーニング アルゴリズムです。最初に発明されたときは、コンピューティング能力のボトルネックのため疑問視されていました。最近まで長年にわたる計算能力、データの爆発的な増加によって画期的な進歩がもたらされました。 DNN は、複数の隠れ層を含むニューラル ネットワーク モデルです。このモデルでは、各層が入力を次の層に渡し、
 Elasticsearch ベクトル検索の開発の歴史を基礎から実践まで振り返ります。
Oct 23, 2023 pm 05:17 PM
Elasticsearch ベクトル検索の開発の歴史を基礎から実践まで振り返ります。
Oct 23, 2023 pm 05:17 PM
1. はじめに ベクトル検索は、最新の検索および推奨システムの中核コンポーネントとなっています。テキスト、画像、音声などの複雑なオブジェクトを数値ベクトルに変換し、多次元空間で類似性検索を実行することにより、効率的なクエリ マッチングとレコメンデーションが可能になります。基本から実践まで、Elasticsearch の開発の歴史を確認します。この記事では、各段階の特徴と進歩に焦点を当てて、Elasticsearch ベクトル検索の開発の歴史を振り返ります。歴史をガイドとして考慮すると、Elasticsearch ベクトル検索の全範囲を確立するのは誰にとっても便利です。
 AlphaFold 3 が発売され、タンパク質とすべての生体分子の相互作用と構造をこれまでよりもはるかに高い精度で包括的に予測します。
Jul 16, 2024 am 12:08 AM
AlphaFold 3 が発売され、タンパク質とすべての生体分子の相互作用と構造をこれまでよりもはるかに高い精度で包括的に予測します。
Jul 16, 2024 am 12:08 AM
エディター | Radish Skin 2021 年の強力な AlphaFold2 のリリース以来、科学者はタンパク質構造予測モデルを使用して、細胞内のさまざまなタンパク質構造をマッピングし、薬剤を発見し、既知のあらゆるタンパク質相互作用の「宇宙地図」を描いてきました。ちょうど今、Google DeepMind が AlphaFold3 モデルをリリースしました。このモデルは、タンパク質、核酸、小分子、イオン、修飾残基を含む複合体の結合構造予測を実行できます。 AlphaFold3 の精度は、これまでの多くの専用ツール (タンパク質-リガンド相互作用、タンパク質-核酸相互作用、抗体-抗原予測) と比較して大幅に向上しました。これは、単一の統合された深層学習フレームワーク内で、次のことを達成できることを示しています。
