

自動運転AIチップ選定の20の重要指標を棚卸し

自動運転の中核コンポーネントおよび自動運転の「頭脳」として、中央コントローラーは通常、複数の外部カメラ、ミリ波レーダー、ライダー、IMU、その他の機器に接続する必要があり、その機能には画像認識が含まれます。 、データ処理など。
インテリジェントなハードウェアとして、複雑なAI計算とインテリジェントな制御を完了するために、ハードウェアレベルには、環境認識やディープラーニングなどの膨大な計算能力要件を担うAI処理チップと、制御を担うCPUが必要です意思決定と論理操作、および機能安全と車両制御を担当する MCU。ソフトウェア レベルには、オペレーティング システム、ミドルウェア、アプリケーション層の AI アルゴリズムが含まれます。
ハードウェアレベルのチップの 3 つの部分、または 3 つの重要なチップ:
最初の部分は通常、GPU または TPU であり、大規模な浮動小数点並列コンピューティング要件を引き受け、主に環境認識とXavierのGPUユニットやAscend 310など、カメラを含む情報の融合、LIDARなどのセンサー情報の認識、融合、分類など。
2 番目の部分は主に CPU と同様の ARM アーキテクチャであり、主に論理演算と意思決定制御を担当し、高精度浮動小数点シリアル計算を処理します。
3 番目の部分は主に信頼性と車両制御、つまり機能安全と冗長監視を担当しますが、高い計算能力は必要ありませんが、信頼性は ISO26262 レベルで保証されている必要があります。最も一般的に使用されているのは、Infineon の TC297 または TC397 です。
ソフトウェア レベルのアプリケーション層 AI アルゴリズムは通常、自動車メーカーまたは OEM 自体によって開発され、車両のパフォーマンスと違いを反映します。ミドルウェアは通常、ROS と同様にドメイン コントローラー開発者によって提供され、主にいくつかのインターフェイス ドライバーと最適化された展開が含まれます。オペレーティング·システム。
オペレーティング システムに関しては、ファーウェイは自社開発の Honmeng システムを使用しており、MDC プラットフォームは Adaptive AUTOSAR と互換性があります。現在、車載グレードには QNX が最良かつ唯一の選択肢ですが、Linux と Autoware のコストが高くなります。オープンソースのおかげで人気が高まっている Linux カーネルをベースにしたオペレーティング システムは、ユーザー数が最も多く、特に Linux は現在、その強力なエンジニアリング ベースとエコシステム、そして ROS の長年にわたるアプリケーション基盤のおかげで非常に人気があります。

自動運転AIチップの選択について
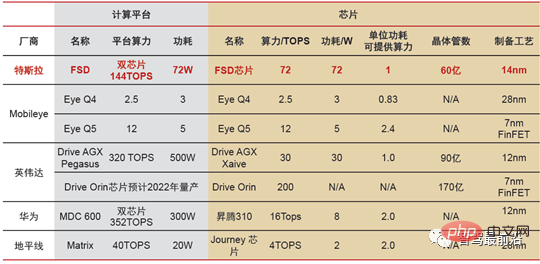
市場にあるAIチップ、特に量産に達したものはあまり多くなく、Tesla、NVIDIA、Mobileyeのみです。テスラの自社開発および自社使用製品を除き、他のブランドは現在、共同開発を通じてテストサンプルを入手できます。
NVIDIA Xavier を例に挙げると、比較的早く NVIDIA Xavier がリリースされ、エコロジカルなレイアウトが比較的完成しているため、開発者はシステムを迅速に構築し、AI アプリケーションを開発できるため、Xavier モジュールに基づいています。ドメイン コントローラーを設計する企業は少なくありません。
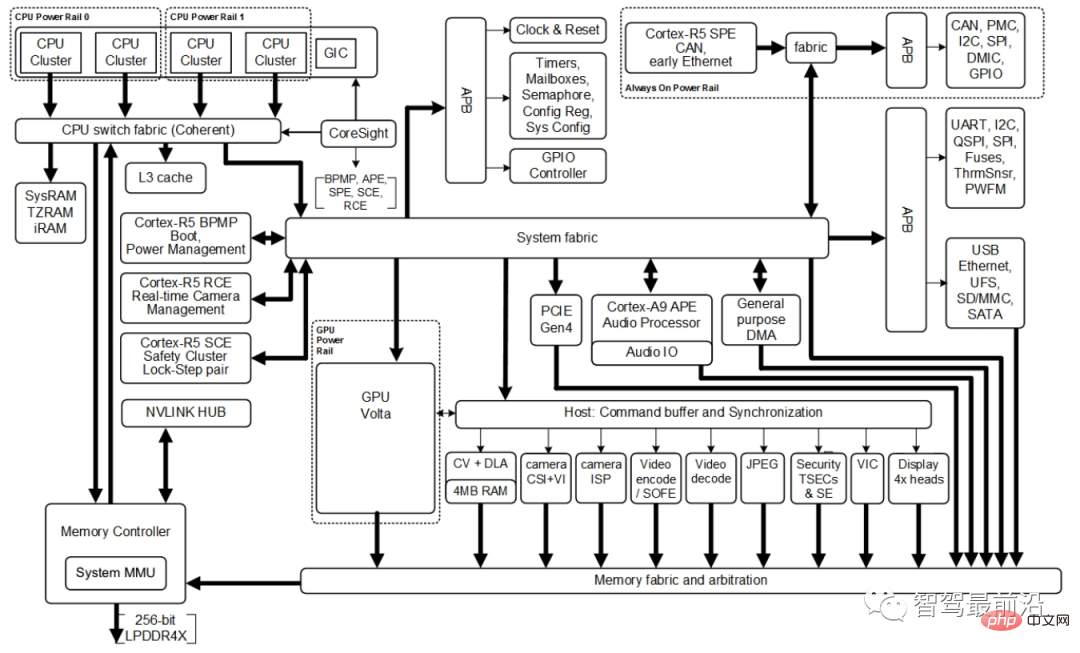
XavierSoC は最大 30TOP の演算能力を持ち、Valta TensorCore GPU、8 コア ARM64 CPU、デュアル NVDLA 深層学習アクセラレータ、画像プロセッサ、ビジュアル プロセッサ、ビデオ プロセッサを含む 6 つの異なるプロセッサを搭載しており、数十の処理能力を備えています。センサーデータ処理、環境認識、位置決めとマッピング、経路計画のためのアルゴリズムを同時にリアルタイムで実行します。
チップの内部構造は下の図に示されています:
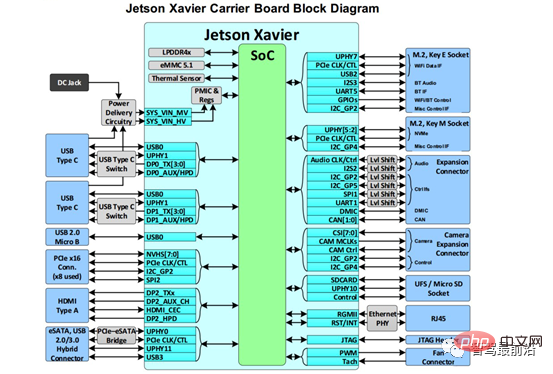
NVIDIAが提供するXavierはコアモジュールであり、そのインターフェースは下の図に示されています:

チップの主要指標
1)コア: コアは通常、空間の中心です。自動運転コントローラーと周辺のセンサーやアクチュエーターとの通信を容易にする一方で、周辺を保護するためにも利用します。コアダウンとは、通常、自動運転コントローラの外部機能全体のコア機能を重視したものを指します。
2) DMIPS: 主に整数計算能力を測定するために使用されます。これには、1 秒あたりに実行できる命令セットの数と、テスト プログラムを実装するときにこれらの命令セットが 1 秒あたりに実行できるタスクの数が含まれます。この能力は、CPU アーキテクチャ、メモリ アクセス速度、その他のハードウェア特性によって決まります。決める。これは、対応するテスト プログラムを実行する際の CPU の相対的なパフォーマンスを測定する単位です (多くの自動運転チップの評価状況では、人々はこのパフォーマンス指標の単位として MIPS を使用することに慣れています)。
3) メモリ: メモリ管理ユニットの主な機能には、仮想アドレスから物理アドレスへのマッピング、メモリ アクセス制御、キャッシュ サポートなどが含まれます。
4) データフラッシュ: データフラッシュは大容量の製品です。アメリカの ATMEL 社によって発売された Nor テクノロジーを使用して製造されたシリアル フラッシュ メモリ製品は、データやプログラム コードの保存に使用できます。パラレル フラッシュ メモリと比較して、必要なピン数が少なく、サイズが小さく、拡張が容易で、マイコンやコントローラへの接続が簡単で、確実に動作するため、自動運転コントローラ製品にはデータフラッシュと同様のシリアル フラッシュ コントローラが使用されることが増えています。測定および制御システムは評価中です。
5)ISP:視覚処理チップの中核として、ISPの主な機能にはAE(自動露出)、AF(自動フォーカス)、AWB(自動ホワイトバランス)、画像ノイズ除去、LSC(レンズシェーディング)が含まれますCorrection)、BPC (Bad PixelCorrection)、そして最後に Raw Data を保存し、ビデオコーデックや CV などに渡します。 ISP を通じてより優れた画像効果が得られるため、自動運転車における ISP の要件は非常に高く、たとえば、デュアル チャネル、さらには 3 チャネルの ISP が統合され始めています。一般に、ISP は AP に統合されています (多くの AP チップ メーカーにとって、これは差別化された競争の重要な部分です)。しかし、ニーズの変化に応じて、独立した ISP も登場するのが主な理由です。同時に、AP チップ内の ISP 機能の欠陥を補い、連携します。
6) 計算能力: 自動運転の実現には、環境検知センサーを利用して道路環境に関する情報を収集し、収集したデータを自動車の中央プロセッサに送信して障害物や走行可能な道路などを識別する処理が必要です。認識結果に基づいて、経路計画、車両速度の設定、および車両の運転を自動制御します。自動運転の安全性を確保するには、プロセス全体を瞬時に完了する必要があり、遅延をミリ秒、さらにはマイクロ秒レベルで制御する必要があります。瞬時の処理、フィードバック、意思決定、計画、および実行の効果を達成するために、中央プロセッサの計算能力は非常に高くなります。
自動運転では、視覚処理が最も多くの計算能力を消費し、すべての計算能力要件の半分以上を占めます。また、自動運転のレベルが上がるごとに、計算能力の需要は少なくとも 10 倍に増加します。 L2 レベルは 2 TOPS の計算能力を必要とし、L3 は 24 TOPS の計算能力を必要とし、L4 は 320TOPS、L5 は 4000+TOPS です。
車載アプリケーションの複雑さを考慮すると、車載プロセッサは、車両の規制や安全基準に合格しているかどうかなど、コンピューティング能力の使用率も考慮する必要があります。計算能力の理論値は、計算精度、MAC 数、動作周波数に依存します。
理論的な計算能力は、ネット畳み込み層の乗算演算の累積に基づいて計算され、畳み込み層の各積和演算 (MAC) は 2 OPS としてカウントされ、畳み込み演算量は 90 以上を占めます。 DL NET の % です。他の補助演算や他のレイヤーの演算は無視されます。SSD のすべての畳み込みレイヤーの乗算演算の合計数は 40G MAC であるため、理論上の計算能力は 80GOPS になります。
その中で、

実際の値と理論上の値は大きく異なり、他のコンピューティング層を考慮すると、ハードウェアの実際の使用率はより高くなります。コンピューティング能力の真の値を決定する最も重要な要素は、メモリ (SRAM および DRAM) の帯域幅、実際の動作周波数 (つまり、供給電圧または温度)、およびアルゴリズムのバッチ サイズです。
7) 消費電力: 最高性能モードでは、自動運転コントローラーのチップ消費電力レベルが高いと、それ自体の性能が高くても、発熱が2倍になるなど、予期せぬ隠れた危険が発生します。これらの結果は、特に新エネルギーモデルにとっては間違いなく「核爆弾」です。したがって、自動運転チップの初期設計では、その消費電力指標を十分に考慮する必要があります。
8) 3D GPU: GPU は、大きなスループットに基づいて設計されており、大規模な並列コンピューティングを処理するために使用されます。 GPU コントロール ユニットは、複数のアクセスをより少ないアクセスに結合できます。 GPU は、CPU のような複雑なデータ キャッシュや命令制御の代わりに、実行ユニットに多くのトランジスタを使用します。 GPU はスーパー浮動小数点コンピューティング機能を備えているため、スマートカーのフロントエンドの画像またはビデオ処理分野で使用することができ、中央コントローラー向けの高性能コンピューティングの主流の設計でも使用されることが増えています。
9) 豊富なIOインターフェースリソース
自動運転のメイン制御プロセッサには、さまざまなセンサーデバイスを接続するための豊富なインターフェースが必要です。現在、業界で一般的な自動運転センサーには、主にカメラ、ライダー、ミリ波レーダー、超音波レーダー、統合ナビゲーション、IMU、V2X モジュールが含まれます。
- カメラの主なインターフェイスの種類は次のとおりです: MIPI CSI-2、LVDS、FPD Link など。
- Lidarは通常、通常のイーサネットインターフェースを介して接続されます。
- ミリ波レーダーはCANバスを介してデータを送信します
- 超音波レーダーは基本的にLINバスを使用します
- 統合航法と慣性航法に共通のインターフェースIMUはRS232です
- V2Xモジュールも一般的に使用されるイーサネットインターフェースですデータを送信する
上記のセンサーに必要な IO インターフェイスに加えて、PCIe、USB、I2C、SPI、RS232 などの他の一般的な高速インターフェイスと低速インターフェイスも必要です。 。
10) PCIe: CPU のローカルバスとして、高いデータ転送スループットと低遅延が最大の特徴です。
11)SaftyGoal: 機能安全目標は、自動運転中央コントローラー全体の中核となる設計要件であり、自動運転機能設計全体における単一点故障解析の結果に影響を与えるため、早期に完全に実装する必要があります。ハードウェア設計では、システムのハードウェアの機能安全設計要件を完全に満たせるかどうかを検討します。
12) OTA: リモート アップグレードはユーザーのソフトウェア障害を修復し、中間ステップの時間を大幅に短縮し、ソフトウェアをユーザーに迅速に届けることができ、同時に車両に新しい機能を追加して範囲を広げることができます。 「サービス」と「オペレーション」。したがって、中央コントローラチップがOTAに対応しているかどうかは、自動車メーカーのリコール費用、ユーザーの時間的コストを含む自動車メーカーとユーザーのコスト削減、ユーザーの鮮度向上、車両の付加価値向上には不可欠である。
13) パッケージの種類: コントローラーのパッケージ サイズ、ピンの定義などは、駆動コントローラー全体の設置形式に影響を与え、周辺コンポーネントへの接続の配分にも影響します。また、インターフェースが防水かどうか、防水であればコントローラの設置環境も比較的自由になります。ただし、現在のドメイン制御インターフェイスは防水ではありません。
14) 温度/電圧: コントローラの温度制御範囲には、保管および使用周囲温度が含まれます。実車確認前のミリ波コントローラ組立配置エリアの保管および使用周囲温度が、それより高い場合は、これに基づいて、OEM 要件を満たすためにある程度の修正と上方調整を実行する必要があり、サプライヤーはハードウェア設計の欠陥によるリコールが発生しないことを保証する必要があります。特に、コンピューティング能力が 100 を超え、消費電力が 60 W を超える場合、温度上昇により、コントローラーの通常の動作に影響を与えることなく確実に熱を確実に外部に逃がすことができるように、アクティブな冷却が必要になる可能性が高くなります。アクティブ冷却には通常、ファン冷却と水冷が含まれます。
15) 自動車の規制と機能安全: 家庭用電化製品と比較して、自動車用チップには安全性と信頼性の点で最も高い要件があります。
車載電子製品が動作温度、信頼性などの高水準の品質要件を確実に満たすことを保証するために、車載用チップは「-40℃~125℃」の高温および低温および激しい振動の過酷な環境で長年にわたって動作してきました。国際オートモーティブ エレクトロニクス オートモーティブ エレクトロニクス評議会 (AEC) は、関連する品質認証基準を確立しています。その中には、AEC-Q100 が車載用集積回路ストレス テストの認証基準です。長年の開発を経て、AEC-Q100 規格は、信頼性と製品寿命の点で車載電子製品の事実上の業界標準になりました。
自動運転チップは、車両の法規制要件を満たすことに加えて、ISO 26262規格で定義される「機能安全(Fusa)」の認証要件も満たす必要があります。チップに対する機能安全の設計要件は、チップ障害 (システム障害とランダム障害に分けられる) を可能な限り検出して修正することです。システム障害は本質的に製品設計の欠陥であるため、主に設計と実装のプロセス仕様に依存しますが、ランダム障害はチップ設計の特別な障害検出メカニズムに大きく依存します。
ISO 26262 は安全レベルを分割しており、一般的なものは ASIL-B レベルと ASIL-D レベルです。 ASIL-B ではチップが単一点障害シナリオの 90% をカバーする必要がありますが、ASIL-D では 99% が必要です。チップ面積が大きくなり、トランジスタの数が増えるほど、対応する故障率も高くなります。
16) チップシステム: たとえば、コントローラーが MCU+MPU の統合制御方式をサポートしているか、またはシングルチップ制御のみをサポートしているか。
17) サプライチェーンの安全性: 市場の需要の増大により、半導体の通常の生産リズムを混乱させるさまざまな「自然災害」を含む、半導体のサプライチェーンと生産能力の不足が生じており、需要と生産能力の矛盾が生じています。短期的に解決するのは難しい。
世界的なチップ サプライ チェーンが非常に逼迫しているため、ドメイン コントローラー サプライヤーにとってサプライ チェーンのセキュリティも非常に困難です。 OEM がドメイン コントローラーのサプライヤーを選択する場合、パートナーのチップ メーカーの供給能力も重要な考慮事項となります。
2022 年になっても、チップ不足は依然として自動車業界に影響を及ぼしており、一部の OEM は半導体供給に関する新しいアイデアを検討し始めており、一部の OEM は Tier 1 を迂回してチップ設計メーカーに直接取引を行っています。より詳細な OEM がチップ設計の研究開発プロセスに参加し始めています。たとえば、多くの自動車会社は、Black Sesame や Horizon などの自動運転 AI チップ メーカーと戦略的パートナーシップを確立しています。さらに、半導体サプライチェーンに直接侵入し、メインのエンジン工場にチップ設計を導入するこのモデルは「OEM-Foundry-Direct」モデルと呼ばれ、代表的な企業にはTesla、BYDなどが挙げられます。
18) 市場での位置付け: どのような種類のメイン制御チップを選択するときは、まずドメイン コントローラーの市場での位置付け、つまり実装する予定の機能と構成に使用される価格帯を検討する必要があります。
運転支援を実現し、L1~L2製品を作ることが目標であり、量が多い場合、チップを選択する際にはコストに非常に敏感になります。このようなドメイン制御製品の場合は、ミッドエンドからローエンドのチップを選択してください。
「L4 限定シナリオで自動運転車を作成することが目標の場合、顧客はカスタマイズされた製品を作成する傾向が強いかもしれません。たとえば、当社がロボタクシーとして位置付ける場合、当社は次のような操作を採用する予定です」モデルの目的は、最初にアルゴリズムを磨き上げることです。その量はそれほど大きくないため、チップを選択する際は比較的コストに敏感ではありませんが、十分なパフォーマンスと十分な安定性が必要です。」 19) チップのロードマップ: Neusoft Reach の副ゼネラルマネージャーである Liu Wei 氏は次のように述べています。たとえば、一部のチップメーカーは、優れたチップが開発されたが、将来的には更新されない場合、このチップをベースにした後続の製品の反復とアップグレードに大きな問題が発生する可能性があります。エレクトロニクス インテリジェント ドライビングのシステム設計担当者、Li Maoqing 氏も同様の観点から次のように述べています。チップ会社の製品ロードマップと柔軟なファミリーベースのチップ シリーズがあるかどうかを完全に理解するため、後続のチップをハードウェア プラットフォームで PIN から PIN にアップグレードして、開発コストを削減しながらハードウェアのパフォーマンスを向上させることができますか?」
20) チップ エコロジー (ツール チェーン): チップのソフトウェア ツール チェーン全体または一部のアルゴリズムの開発が顧客のニーズを満たすことができるかどうか。言い換えれば、チップの生態系は何でしょうか? 顧客の実用的な開発をサポートできる優れたエコシステムがあるかどうかも、OEM または Tier1 がチップを選択する際の重要な考慮事項の 1 つです。
NVIDIA のチップ エコシステムには、開発者、利用可能なアプリケーション ソフトウェア、豊富なツールとライブラリが含まれており、自動車分野に豊富なソフトウェア アルゴリズムを提供できます。 一般的な AI 分野で多数のアルゴリズム モデルと関連アプリケーション ソフトウェアをトレーニングしました。
- 自動車分野に簡単に移植できる統合されたハードウェアと基盤となるソフトウェア インターフェイス アーキテクチャ (CUDA-X)。ユーザーの使用量が多いため、パートナーは CUDA プラットフォームに多数のライブラリとツールを提供してきました。
- Zhixing Technology のハードウェア研究開発ディレクターは次のように説明しました。「多くの OEM が現在、NVIDIA の Orin チップを使用しています。これは、大規模なコンピューティング パワー プラットフォームであることに加えて、ソフトウェア全体を提供できることです。ツールチェーン、さらには基盤となるコードやアルゴリズムコードも提供でき、開発者はチップを選択するだけでなく、実装可能な高度な自動運転コンピューティングプラットフォームをより適切に開発することができます。
-
自動運転ドメイン コントローラーの選択プロセスにおける上記の重要な要素に基づいて、市場で主流のコントローラー チップの統計分析を実施しました。次の分析結果の比較表が作成されました。
以上が自動運転AIチップ選定の20の重要指標を棚卸しの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7552
7552
 15
1382
52
83
11
22
91
15
1382
52
83
11
22
91

 Centosシャットダウンコマンドライン
Apr 14, 2025 pm 09:12 PM
Centosシャットダウンコマンドライン
Apr 14, 2025 pm 09:12 PM
Centos Shutdownコマンドはシャットダウンし、構文はシャットダウン[オプション]時間[情報]です。オプションは次のとおりです。-hシステムをすぐに停止します。 -pシャットダウン後に電源をオフにします。 -r再起動; -t待機時間。時間は、即時(現在)、数分(分)、または特定の時間(HH:mm)として指定できます。追加の情報をシステムメッセージに表示できます。
 Centosのgitlabのバックアップ方法は何ですか
Apr 14, 2025 pm 05:33 PM
Centosのgitlabのバックアップ方法は何ですか
Apr 14, 2025 pm 05:33 PM
Centosシステムの下でのGitlabのバックアップと回復ポリシーデータセキュリティと回復可能性を確保するために、Gitlab on Centosはさまざまなバックアップ方法を提供します。この記事では、いくつかの一般的なバックアップ方法、構成パラメーター、リカバリプロセスを詳細に紹介し、完全なGitLabバックアップと回復戦略を確立するのに役立ちます。 1.手動バックアップGitlab-RakeGitlabを使用:バックアップ:コマンドを作成して、マニュアルバックアップを実行します。このコマンドは、gitlabリポジトリ、データベース、ユーザー、ユーザーグループ、キー、アクセスなどのキー情報をバックアップします。デフォルトのバックアップファイルは、/var/opt/gitlab/backupsディレクトリに保存されます。 /etc /gitlabを変更できます
 CentOS HDFS構成をチェックする方法
Apr 14, 2025 pm 07:21 PM
CentOS HDFS構成をチェックする方法
Apr 14, 2025 pm 07:21 PM
CENTOSシステムでHDFS構成をチェックするための完全なガイドこの記事では、CENTOSシステム上のHDFSの構成と実行ステータスを効果的に確認する方法をガイドします。次の手順は、HDFSのセットアップと操作を完全に理解するのに役立ちます。 Hadoop環境変数を確認します。最初に、Hadoop環境変数が正しく設定されていることを確認してください。端末では、次のコマンドを実行して、Hadoopが正しくインストールおよび構成されていることを確認します。HDFS構成をチェックするHDFSファイル:HDFSのコア構成ファイルは/etc/hadoop/conf/ディレクトリにあります。使用
 CentosでのZookeeperのパフォーマンスを調整する方法は何ですか
Apr 14, 2025 pm 03:18 PM
CentosでのZookeeperのパフォーマンスを調整する方法は何ですか
Apr 14, 2025 pm 03:18 PM
CENTOSでのZookeeperパフォーマンスチューニングは、ハードウェア構成、オペレーティングシステムの最適化、構成パラメーターの調整、監視、メンテナンスなど、複数の側面から開始できます。特定のチューニング方法を次に示します。SSDはハードウェア構成に推奨されます。ZookeeperのデータはDISKに書き込まれます。十分なメモリ:頻繁なディスクの読み取りと書き込みを避けるために、Zookeeperに十分なメモリリソースを割り当てます。マルチコアCPU:マルチコアCPUを使用して、Zookeeperが並行して処理できるようにします。
 CentosでPytorchモデルを訓練する方法
Apr 14, 2025 pm 03:03 PM
CentosでPytorchモデルを訓練する方法
Apr 14, 2025 pm 03:03 PM
CentOSシステムでのPytorchモデルの効率的なトレーニングには手順が必要であり、この記事では詳細なガイドが提供されます。 1。環境の準備:Pythonおよび依存関係のインストール:Centosシステムは通常Pythonをプリインストールしますが、バージョンは古い場合があります。 YumまたはDNFを使用してPython 3をインストールし、PIP:sudoyumupdatepython3(またはsudodnfupdatepython3)、pip3install-upgradepipをアップグレードすることをお勧めします。 cuda and cudnn(GPU加速):nvidiagpuを使用する場合は、cudatoolをインストールする必要があります
 CentosのPytorchのGPUサポートはどのようにサポートされていますか
Apr 14, 2025 pm 06:48 PM
CentosのPytorchのGPUサポートはどのようにサポートされていますか
Apr 14, 2025 pm 06:48 PM
Pytorch GPUアクセラレーションを有効にすることで、CentOSシステムでは、PytorchのCUDA、CUDNN、およびGPUバージョンのインストールが必要です。次の手順では、プロセスをガイドします。CUDAおよびCUDNNのインストールでは、CUDAバージョンの互換性が決定されます。NVIDIA-SMIコマンドを使用して、NVIDIAグラフィックスカードでサポートされているCUDAバージョンを表示します。たとえば、MX450グラフィックカードはCUDA11.1以上をサポートする場合があります。 cudatoolkitのダウンロードとインストール:nvidiacudatoolkitの公式Webサイトにアクセスし、グラフィックカードでサポートされている最高のCUDAバージョンに従って、対応するバージョンをダウンロードしてインストールします。 cudnnライブラリをインストールする:
 Dockerの原則の詳細な説明
Apr 14, 2025 pm 11:57 PM
Dockerの原則の詳細な説明
Apr 14, 2025 pm 11:57 PM
DockerはLinuxカーネル機能を使用して、効率的で孤立したアプリケーションランニング環境を提供します。その作業原則は次のとおりです。1。ミラーは、アプリケーションを実行するために必要なすべてを含む読み取り専用テンプレートとして使用されます。 2。ユニオンファイルシステム(UnionFS)は、違いを保存するだけで、スペースを節約し、高速化する複数のファイルシステムをスタックします。 3.デーモンはミラーとコンテナを管理し、クライアントはそれらをインタラクションに使用します。 4。名前空間とcgroupsは、コンテナの分離とリソースの制限を実装します。 5.複数のネットワークモードは、コンテナの相互接続をサポートします。これらのコア概念を理解することによってのみ、Dockerをよりよく利用できます。
 CentosのPHPのセキュリティポリシーは何ですか
Apr 14, 2025 pm 02:33 PM
CentosのPHPのセキュリティポリシーは何ですか
Apr 14, 2025 pm 02:33 PM
CENTOSサーバーのPHPセキュリティポリシーの詳細な説明:強固な保護システムの構築この記事では、セントスシステムに安全なPHP動作環境を構築する方法を詳細に調査し、システムレベル、PHP構成、許可管理、HTTPS暗号化、セキュリティ監視など、サーバー攻撃のリスクを効果的に減らすのに役立つ複数の側面をカバーします。サーバーセキュリティは、定期的なレビューとセキュリティポリシーの更新を必要とする継続的な改善プロセスです。 1. System Security Cornerstone Systemの更新:CENTOSシステムとすべてのソフトウェアパッケージの最新バージョンを保持し、セキュリティパッチをタイムリーにインストールし、既知の脆弱性をプラグインします。ファイアウォール保護:ファイアウォールを使用してサーバーネットワークアクセスを微調整し、必要なポートのみ(HTTPポート80やHなど
