

スマートカーの機能安全ソフトウェア アーキテクチャ

01 E-GAS 安全アーキテクチャの考え方
自動車の機能安全は、電子および電気システムの故障によって引き起こされる人身危害のリスクを妥当な範囲内に制御することを目的としています。次の図は、一般的な電子および電気システムのハードウェア構成図です。電子および電気システムのコンポーネントには、図に表示されているハードウェアに加えて、図には表示されていないソフトウェアも含まれています。
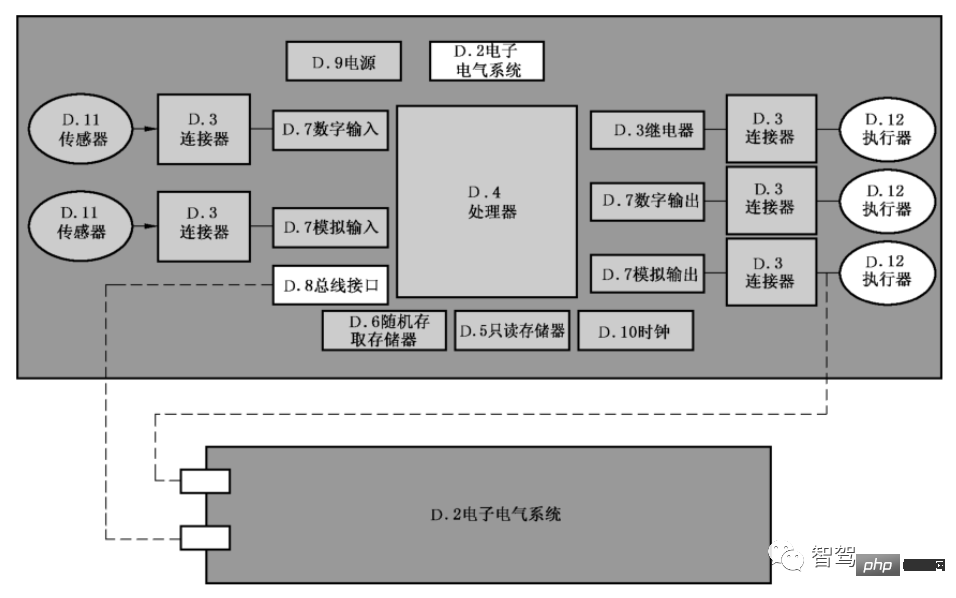
##図 1 一般的に使用される電子および電気ハードウェア システム
電子および電気システムの障害には、ソフトウェアおよびハードウェアの設計エラーによって引き起こされるシステム障害と、ランダムなハードウェア障害によって引き起こされる障害の両方が含まれます。システムのアーキテクチャに応じて、機能障害を防止および検出し、障害発生時の被害を回避または軽減するために、さまざまな安全機構を設計する必要があります。これには、これらの安全メカニズムを管理および制御し、機能安全の開発全体の困難さを軽減するための強力な機能安全ソフトウェア アーキテクチャが必要です。
現在、E-GAS (ガソリンおよびディーゼル エンジン コントロール ユニット向けの標準化された E-ガス監視コンセプト) は、間違いなく最も広く使用されているセキュリティ ソフトウェア アーキテクチャ ソリューションです。 E-GAS は当初、ガソリン/ディーゼル エンジン管理システムの安全アーキテクチャ ソリューションとして提案されましたが、簡単な適応により、車体システム、トランスミッション システム、新エネルギー 3 電気システムなどにも使用でき、非常に優れた性能を発揮します。パフォーマンス 拡張性があり、広く使用されています。
#下の図は、E-GAS の 3 層ソフトウェア アーキテクチャの設計図で、上から順に Level1 ~ Level3 の計 3 層に分かれています。は機能実装層(機能レベル)、Level2は機能監視レベル、Level3はコントローラ監視レベルです。このアーキテクチャは、優れた階層化された監視フレームワークを形成し、機能安全分解を効果的に実現します。 QM (ASIL X) の安全分解戦略 ASIL X (ASIL 機能冗長ソフトウェアまたは安全対策 (レベル 2、レベル 3) は、最高の要求レベルに従って開発されます) ASIL X (ASIL X) は、機能ソフトウェアの安全性開発コストを効果的に削減できます。
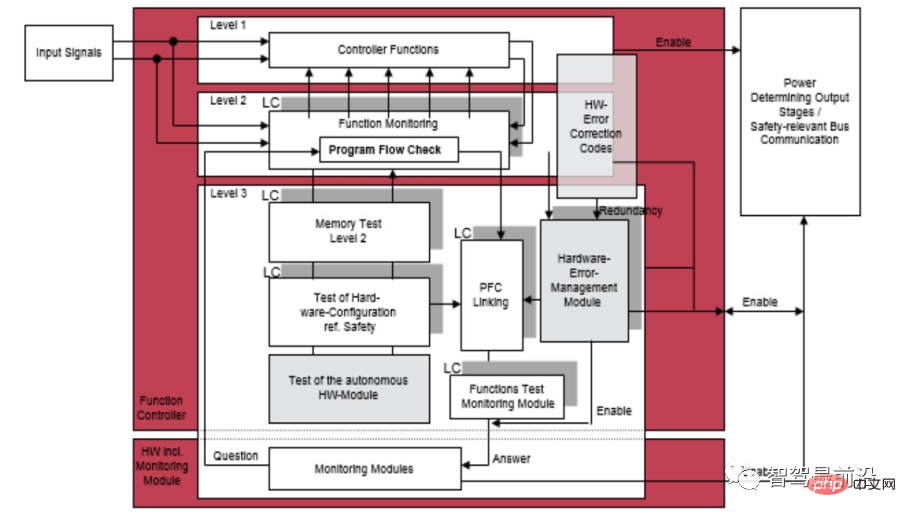
#レベル 1 の機能実装層##レベル 1 は機能実装層であり、モーター コントローラーなどの特定の機能の実装を完了します。言い換えれば、この層は要求されたトルクをモーターのトルク出力に変換します。
#レベル 2 機能監視レイヤー
レベル 2 は機能監視レイヤーであり、監視に使用されます。 Level1 機能が正常に動作するかどうか。 Level2 の核心は、Level1 が正常に実行されているかどうかを判断するメソッドを設計することです。 Level1が正常に動作しているかどうかの判定方法は監視対象機能に関係することが多いですが、ソフトウェアの多様化や冗長化など監視対象機能ごとに判定方法が異なります。ただし、合理性チェックなど、より応用範囲の広い判断方法もあります。
図 3 合理性チェック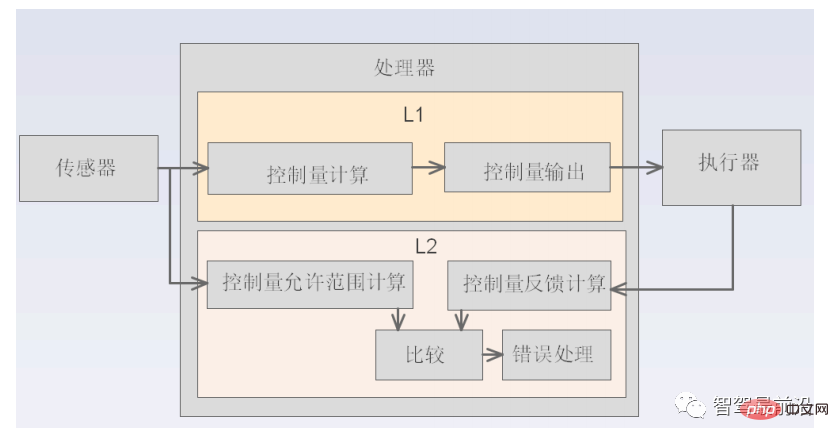
図に示すように上図において、レベル2が合理性検証手法を用いてレベル1の機能が正常に動作しているかどうかを判定する場合、まずセンサーから入力された信号に基づいて制御量の許容出力の妥当な範囲を計算し、次に実際の出力を計算します。アクチュエータからフィードバックされる量をフィードバックし、最終的に Level1 の実際の出力量が許容範囲内であるかどうかを判断し、許容範囲を超えている場合は Level1 の機能が異常であると判断し、エラー処理を行います。
#レベル 3 コントローラー監視レイヤー
レベル 3 はコントローラー監視レイヤーであり、主に次のもので構成されます。機能構成の 3 つの部分。 電子および電気システムのハードウェア診断: コントローラーの CPU コアの障害、RAM の障害、ROM の障害などの電子および電気システムのハードウェア障害を監視します。 独立監視: コントローラー関連の障害が発生すると、コントローラーは安全関連のロジックを確実に実行できなくなります。安全性を確保するには、追加の外部独立監視モジュールが必要です。 MCU に重大な障害が発生した後でも、安全な状態に入ることができるということです。この追加の独立監視モジュールは通常、ウォッチドッグが統合された電源管理チップです。 アプリケーションフローチェック:Level1、Level2の監視プログラムが正常に動作しているか監視します。この監視機能は、バインディング プログラム フロー検査とウォッチドッグ フィードによって実装されます。 Level1 および Level2 に関連する監視プログラムが設定された順序で実行されない場合、または指定された時間内に実行されない場合、プログラム フロー チェックは失敗し、犬に正常に餌を与えることができず、システムは安全状態に入ります。 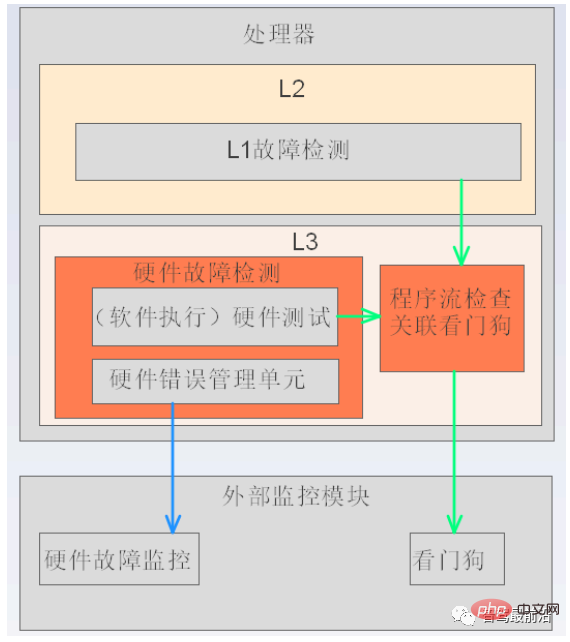
図 4 レベル 3 の機能ブロック図
02 海外における機能安全ソフトウェアアーキテクチャの展開
機能安全とソフトウェアアーキテクチャに関しては、「機能安全に準拠したソフトウェアアーキテクチャ」と「機能安全に準拠したソフトウェアアーキテクチャ」の2つの側面から見ることができます。機能安全ソフトウェア アーキテクチャ」を参照して、それらの間の関係を調べます。
前者は、ソフトウェア開発の観点から見た、ソフトウェア アーキテクチャ設計プロセスの機能安全への準拠に焦点を当てています。つまり、ソフトウェア アーキテクチャ設計プロセスは、ISO によって提案されているさまざまな要件を満たす必要があります。 26262. マーキング方法、設計原則、設計要素要件、セキュリティ解析要件、エラー検出機構要件、エラー処理機構および設計検証方法などの要件。その中で、ソフトウェアアーキテクチャレベルでのセキュリティ分析の主流の手法それは「ソフトウェアFMEA(故障モード影響解析)」と「ソフトウェアDFA(依存故障解析)」です。
後者は、組み込みソフトウェア システムの観点からシステム レベルの機能安全をサポートすることに焦点を当てています。 E-Gasセキュリティアーキテクチャの考え方に基づき、「機能安全ソフトウェアアーキテクチャ」の中核となるのは「階層型監視の考え方」「セキュリティ対策」「診断フレームワーク」であると考えており、「階層型監視の考え方」と「記事で述べたように、このセクションの残りの部分は主に「診断フレームワーク」に焦点を当てます。使用する基本的なソフトウェア開発プラットフォームが AUTOSAR CP、AP、または非 AUTOSAR であるかどうかに関係なく、機能安全ソフトウェア アーキテクチャの設計思想は類似しており、ここでは AUTOSAR CP に基づいて説明します。
#1) 機能安全診断フレームワークの技術要件
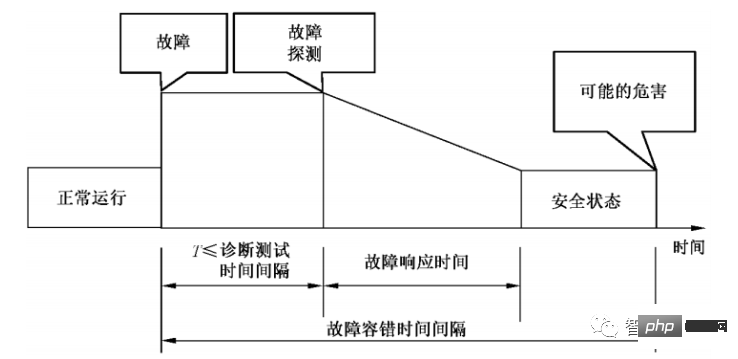
##図 5 障害応答時間とフォールト トレラント時間間隔
障害診断プロセスを理解するために、FTTI (フォールト トレラント時間間隔) を組み合わせます。障害の発生から起こり得る危険が発生するまでの期間が FTTI 時間であり、この期間には主に診断テスト、障害対応プロセスが行われ、起こり得る危険が発生する前に安全な状態に移行することが期待されます (図 4.1-8) )。診断テスト プロセスでは、診断テストのトリガー、障害確認 (デバウンス) などを考慮する必要があります。障害対応プロセスでは、適切な動作モード (フェール セーフ、フェール動作、緊急動作など) への移行を考慮する必要があります。 、障害ストレージなど。
##2) 外国の診断フレームワーク技術の解釈 診断フレームワーク技術を解釈する前に、参考として 2 つの提案があります。 ① 提案 1: 要件に基づいて診断テストのタイミングを決定する a. 電源投入時: 以下に基づいて説明します。典型的なアプリケーション要件。安全機構とその機能は二重の意味を持ち、潜在的な多点故障の故障率を低減するために、一般に安全機構はシステム起動時(電源投入時)に自己診断を行う必要があります。さらに、マルチプロセッサ システムでは、診断テストの同期の問題を考慮する必要があります。 b. 実行時: 一般に、定期的な診断テストと条件付き診断テストに分けられます。診断サイクルの定義では、FDTI (障害検出時間間隔) の制約を考慮する必要があり、条件付き診断テストは通常、状態遷移が発生したとき、または機能をアクティブ化する前に機能を診断します。 c. 電源オフ時: 時間のかかるテストを実行することを選択でき、通常、テスト結果は次回の起動時に処理されます。 ② 推奨事項 2: グループ診断テストを実施する #診断管理 (診断のトリガーや障害への対応などを含む) を容易にするため、重大な障害/非重大な障害、診断テストのタイミング、その他の要因に応じてグループ化されます。コア障害、Ram テスト障害などの重大な障害が電源投入時に検出された場合、障害応答はサイレント状態で処理できます (MCU が連続リセット状態にあるなど)。
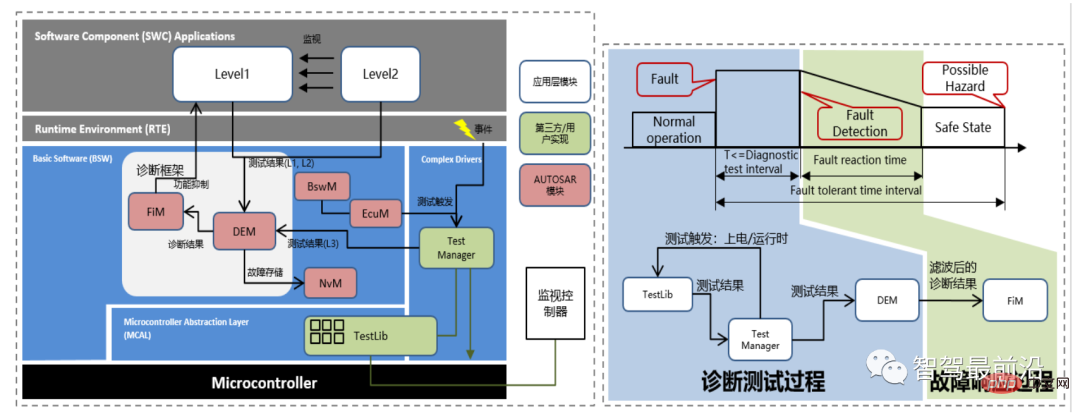
図 6 「機能安全診断フレームワーク」と「機能安全診断制御フロー」 ##E-Gas の 3 層監視フレームワーク Level1 (機能レベル) と Level2 (機能監視レベル) は ASW (アプリケーション ソフトウェア、つまり図 4.1-9 の SWC) 層に位置します。 , Level3(コントローラー監視レベル)はBSW(基本ソフトウェア)層に位置します。 「診断フレームワーク」も BSW 層に位置し、前述したように主に診断テストと障害対応プロセスをカバーします。その構成と作業プロセスは次のとおりです。
- BswM と EcuM は主に電源オンと電源オフの管理を担当し、電源オン、実行時、および起動時、起動時、およびシャットダウン時の電源オフ時に診断テストを実行します。
- #ASW-Level1 (E-Gas Level1) は関数の入出力の診断をカバーし、ASW-Level2 (E-Gas Level2) は一般に、 ASW-Level1 機能と ASW-Level1 ASIL レベルの分解を実現、TestLib (E-GasLevel3) は ECU および MCU レベルでハードウェア障害を監視します (ISO26262 (2018)-Part5 Annex D および MCU 安全マニュアルを参照することをお勧めします) )、レベル 1 およびレベル 2 の一般的な原因による障害の診断をカバーし、論理的かつ時間に依存しない診断のための質問と回答のウォッチドッグ メカニズムを実装するために「監視コントローラー」とともに使用されます
- TestManager が担当しますTestLib 安全メカニズムの診断テストをトリガーし、対応するテスト結果を収集するため
- DEM は E-Gas Level1/2/3 のテスト結果を収集し、診断イベントをデバウンスし、障害コードをマークし、障害を保存しますNvM を通じて情報を提供します。 FiM は、DEM 診断テストの結果 (デバウンス後) に基づいて設定された機能にマークを付け、機能ソフトウェア (ASW-Level1) がマークに基づいて機能の抑制を決定します。
以上がスマートカーの機能安全ソフトウェア アーキテクチャの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 1662
1662
 14
1418
52
1311
25
1261
29
1234
24
14
1418
52
1311
25
1261
29
1234
24

 飛び回ったり、口を開けたり、見つめたり、眉毛を上げたりする顔の特徴をAIが完璧に模倣し、ビデオ詐欺を防ぐことは不可能
Dec 14, 2023 pm 11:30 PM
飛び回ったり、口を開けたり、見つめたり、眉毛を上げたりする顔の特徴をAIが完璧に模倣し、ビデオ詐欺を防ぐことは不可能
Dec 14, 2023 pm 11:30 PM
これほど強力なAIの模倣能力では、それを防ぐことは本当に不可能です。 AIの発展は今ここまで進んでいるのか?前足で顔の特徴を浮き上がらせ、後ろ足で全く同じ表情を再現し、見つめたり、眉を上げたり、口をとがらせたり、どんなに大袈裟な表情でも完璧に真似しています。難易度を上げて、眉毛を高く上げ、目を大きく開き、口の形も歪んでいるなど、バーチャルキャラクターアバターで表情を完璧に再現できます。左側のパラメータを調整すると、右側の仮想アバターもそれに合わせて動きが変化し、口や目の部分がアップになります。同じです(右端)。この研究は、GaussianAvatars を提案するミュンヘン工科大学などの機関によるものです。
 MotionLM: マルチエージェント動作予測のための言語モデリング技術
Oct 13, 2023 pm 12:09 PM
MotionLM: マルチエージェント動作予測のための言語モデリング技術
Oct 13, 2023 pm 12:09 PM
この記事は自動運転ハート公式アカウントより許可を得て転載しておりますので、転載については出典元までご連絡ください。原題: MotionLM: Multi-Agent Motion Forecasting as Language Modeling 論文リンク: https://arxiv.org/pdf/2309.16534.pdf 著者の所属: Waymo 会議: ICCV2023 論文のアイデア: 自動運転車の安全計画のために、将来の動作を確実に予測するロードエージェントの数は非常に重要です。この研究では、連続的な軌跡を離散的なモーション トークンのシーケンスとして表現し、マルチエージェントのモーション予測を言語モデリング タスクとして扱います。私たちが提案するモデル MotionLM には次の利点があります。
 歩行者軌跡予測に有効な手法と一般的なBase手法は何ですか?トップカンファレンスの論文を共有!
Oct 17, 2023 am 11:13 AM
歩行者軌跡予測に有効な手法と一般的なBase手法は何ですか?トップカンファレンスの論文を共有!
Oct 17, 2023 am 11:13 AM
軌道予測はここ 2 年間で注目を集めていますが、そのほとんどは車両の軌道予測の方向に焦点を当てています。本日、自動運転ハートは、歩行者軌道予測のアルゴリズムを NeurIPS - SHENet で共有します。制限されたシーンでは、人間の行動パターンは通常、ある程度、限られたルールに従っています。この仮定に基づいて、SHENet は暗黙のシーン ルールを学習することで人の将来の軌道を予測します。この記事は自動運転ハート様よりオリジナル記事として認定されました!著者の個人的な理解では、人間の動きにはランダム性と主観性があるため、現時点では人の将来の軌道を予測することは依然として困難な問題です。ただし、制約のあるシーンでの人間の動きのパターンは、シーンの制約 (フロア プラン、道路、障害物など) や人間対人間、または人間対オブジェクトの対話性によって異なることがよくあります。
 数年後にはプログラマーが減少するということをご存知ですか?
Nov 08, 2023 am 11:17 AM
数年後にはプログラマーが減少するということをご存知ですか?
Nov 08, 2023 am 11:17 AM
「ComputerWorld」誌はかつて、IBM がエンジニアが必要な数式を書いて提出できる新しい言語 FORTRAN を開発したため、「プログラミングは 1960 年までに消滅するだろう」という記事を書きました。コンピューターを実行すればプログラミングは終了します。画像 数年後、私たちは新しいことわざを聞きました: ビジネスマンは誰でもビジネス用語を使って問題を説明し、コンピュータに何をすべきかを伝えることができます。COBOL と呼ばれるこのプログラミング言語を使用することで、企業はもはやプログラマーを必要としません。その後、IBM は従業員がフォームに記入してレポートを作成できるようにする RPG と呼ばれる新しいプログラミング言語を開発したと言われており、会社のプログラミング ニーズのほとんどはこれで完了できます。
 フーリエ知能万能ヒューマノイドロボット「GR-1」の予約販売が始まります!
Sep 27, 2023 pm 08:41 PM
フーリエ知能万能ヒューマノイドロボット「GR-1」の予約販売が始まります!
Sep 27, 2023 pm 08:41 PM
この人型ロボットは身長 1.65 メートル、体重 55 キログラム、体に 44 の自由度があり、素早く歩き、障害物を素早く回避し、斜面を着実に上り下りし、衝撃干渉に耐えることができます。フーリエインテリジェンスの汎用人型ロボット GR-1 の予約販売が開始されました ロボット講堂 フーリエインテリジェンスの汎用人型ロボット フーリエ GR-1 の予約販売が開始されました。 GR-1 は、高度にバイオニックな体幹構成と擬人化された動作制御を備えており、全身 44 度の自由度を持ち、歩行、障害物を回避、障害物を横切り、坂道を上り下りし、干渉に耐え、さまざまな道路に適応する能力を備えています。一般的な人工知能システムであり、理想的なキャリアです。公式ウェブサイトの先行販売ページ: www.fftai.cn/order#FourierGR-1# フーリエ知能を書き直す必要があります。
 ファーウェイは、心拍数に基づいてユーザーの感情状態を評価できるスマートウェアラブル分野でXuanjiセンシングシステムを発売する
Aug 29, 2024 pm 03:30 PM
ファーウェイは、心拍数に基づいてユーザーの感情状態を評価できるスマートウェアラブル分野でXuanjiセンシングシステムを発売する
Aug 29, 2024 pm 03:30 PM
最近、ファーウェイは、Xuanjiセンシングシステムを搭載した新しいスマートウェアラブル製品を9月に発売すると発表しました。これはファーウェイの最新スマートウォッチとなる予定です。この新製品は、高度な感情的健康モニタリング機能を統合し、正確性、包括性、スピード、柔軟性、オープン性、拡張性という 6 つの特徴を備えた包括的な健康評価をユーザーに提供します。このシステムはスーパーセンシングモジュールを使用し、マルチチャンネル光路アーキテクチャ技術を最適化することで、心拍数、血中酸素、呼吸数などの基本的な指標の監視精度を大幅に向上させます。さらに、Xuanji センシング システムは、心拍数データに基づく感情状態の研究も拡張しており、生理学的指標に限定されず、ユーザーの感情状態やストレス レベルを評価することもでき、60 以上のスポーツのモニタリングをサポートしています。健康指標、心臓血管、呼吸器、神経、内分泌、
 スマートウォッチの電源が入らない: 今何をすべきか
Aug 23, 2023 pm 05:41 PM
スマートウォッチの電源が入らない: 今何をすべきか
Aug 23, 2023 pm 05:41 PM
スマートウォッチの電源が入らない場合はどうすればよいですか?お気に入りのスマートウォッチの寿命を回復するために利用できるオプションは次のとおりです。パワープレイをチェック: スマートウォッチがヘッドライナーとしてスターがちりばめられたステージを想像してみてください。しかし、バッテリーを忘れてしまったために幕が上がらないのです。詳細を掘り下げる前に、スマートウォッチが煙や鏡の上だけで動作していないことを確認してください。適切な充電時間を与えてください。そして、もう少し余裕を感じたら、スタイリッシュな新しいケーブル、つまり流行に敏感なケーブルを贈ってください。素晴らしいリブート: 迷ったときは、少しR&Rしてみましょう。それがリブートとリバイバルです。交響曲を指揮する巨匠のようにこれらのボタンを押し続けます。さまざまなスマートウォッチには独自の再起動儀式があります。Google がガイドです。これは 1 つです
 10億ドルの巨人は価格戦争で生き残れなかった - 中国グランドオートモーティブ
Jul 21, 2024 pm 05:06 PM
10億ドルの巨人は価格戦争で生き残れなかった - 中国グランドオートモーティブ
Jul 21, 2024 pm 05:06 PM
7月16日、中国グランド汽車の終値は19日連続で1元を下回り、その日の終値は0.87元となった。たとえ翌日に株価がストップ高まで上昇したとしても、株価は戻りにくい。 1元。この時点で中国グランド汽車は「株価が連続20営業日1元未満」という上場廃止要件を発動したため、事前に上場廃止がロックされ、上場廃止時点で時価総額が最も高かった銘柄となった。 A株の歴史には、72億ドルという巨額の株がありました。しかし、財務報告書によると、中国グランドオートモービルの2023年の収益は依然として1,379億9,800万元に達し、総車両販売台数は71万3,000台であり、乗用車総販売台数では依然として中国最大の自動車ディーラーグループであり、収益規模では第2位である。資本市場では、2015年にメトロ・ファーマシューティカルズをバックドアで上場させた後、中国グランド・オートモービルの株価は1株当たり最大32.12元まで急騰し、時価総額は一時1000億ドルを超えた。
