

次世代自動運転システムでは、複数のレーザーレーダー、複数のミリ波レーダー、複数のカメラなどの各種センサーを使用する必要があり、データの収集から処理してドメインコントローラーに送信するまでに遅延が発生し、遅延があり、持続時間が不安定です。センサー フュージョン、意思決定計画、フュージョン測位などの自動運転のパフォーマンスを向上させるには、自動運転アドバンスト ドメイン コントローラー HPC とそれに関連するセンサーの時刻を同期する必要があります。実際のプロセスでは、センサーのタイムスタンプ情報を明確に定義します。入力データ (時間を含む)、スタンピング時間と精度の要件)、また全体的な時間同期計画と同期精度の要件を定義する必要があります。
クロック同期の原理を明確に説明するには、まずデータ クロックとクロック同期の 2 種類のクロック同期について説明する必要があります。管理時計。
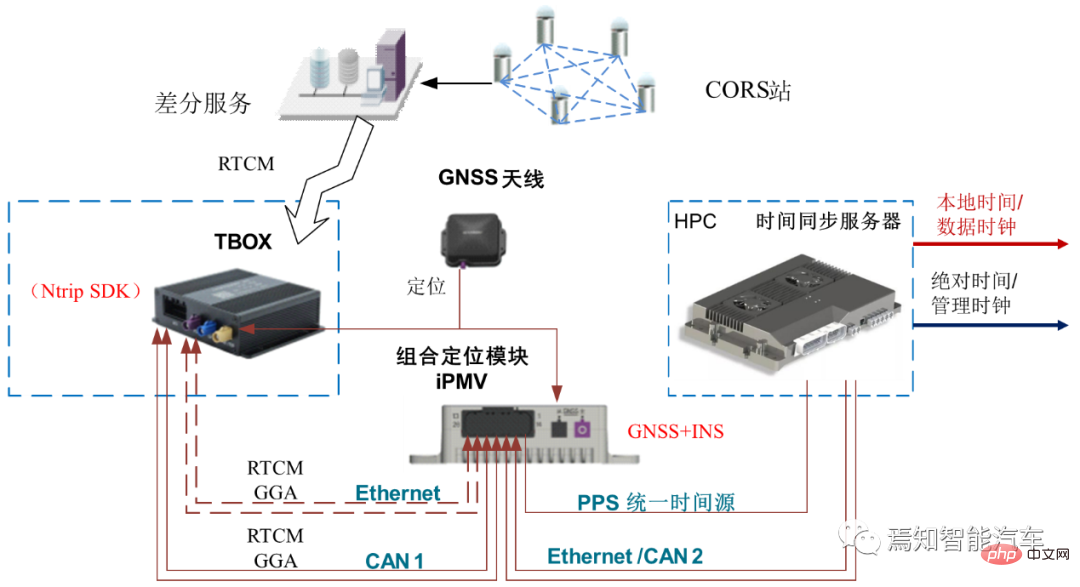
まず、複合慣性航法システムによって提供される UTC 時刻を使用して、PPS GPRMC を通じて時刻同期サーバーにタイミングを提供します。時刻同期サーバーは、PTP プロトコルと中央ゲートウェイを通じて、対応する時刻情報をさまざまなセンサー データ収集ホストに提供します。 HPC は、内部 SOC と MCU の間の時刻同期プロセスを実装する必要があります。
HPC の SOC と MCU 間のデータ プレーン時間は、SOC をマスターとして、gPTP プロトコル時間を介して同期されます。
##HPC の SOC と MCU 間の管理プレーン時間は、HPC プライベート プロトコルを通じて同期されます。SOC はマスターであり、イーサネット リンクを通じて同期されます。SOC と MCU 間の同期プロセス中に、管理クロックとデータ クロックが同期されます。データ プレーンは gPTP プロトコルを使用します。250 マイクロ秒の時間同期精度要件内で、管理クロックはプライベート プロトコルを使用し、イーサネット経由でも精度は 10ms です。内部管理時間とデータ プレーン時間を調整する必要があり、HPC はデータ クロックの連続性を保証し、異常なジャンプを許可する必要があります。異常なジャンプは重大なデータ通信の誤りや誤解を引き起こす可能性があるためです。
ドメイン コントローラーがコールド スタートするたびに、ドメイン コントローラーは一定期間、マスター クロックを提供するノードとの通信を試行します (この時間は必要に応じて調整できます)。実際の状況に合わせて)初期同期を実行します。同期が成功すると、データ クロックは現在の管理時刻を使用して取得した絶対時刻を同期し、対応するドライバーを起動して、対応するアプリケーション ソフトウェアを呼び出して計算することができます。同期が失敗した場合、ドメイン コントローラーは同期を試行し続けます。
2 HPC と VDC 間の同期プロセス
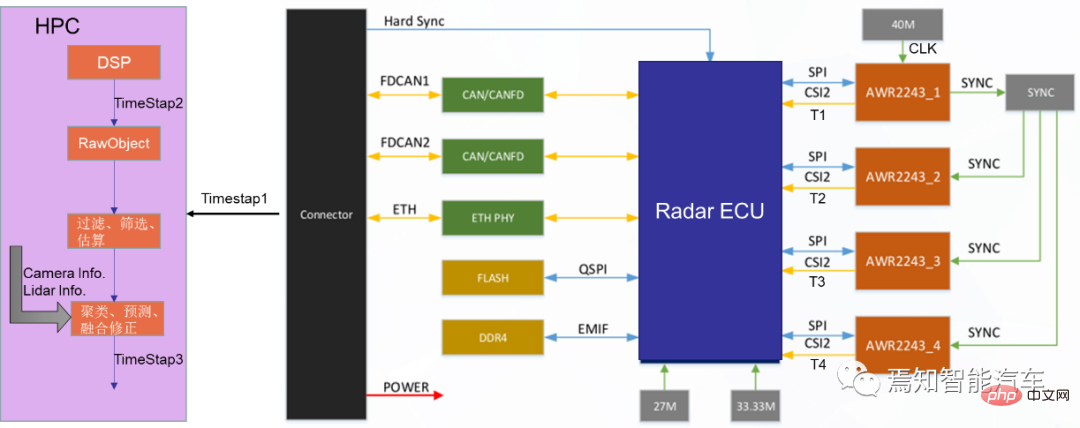
#次の図は、自動運転コントローラー HPC とそれに関連付けられたドメイン コントローラーの接続関係を示しています。
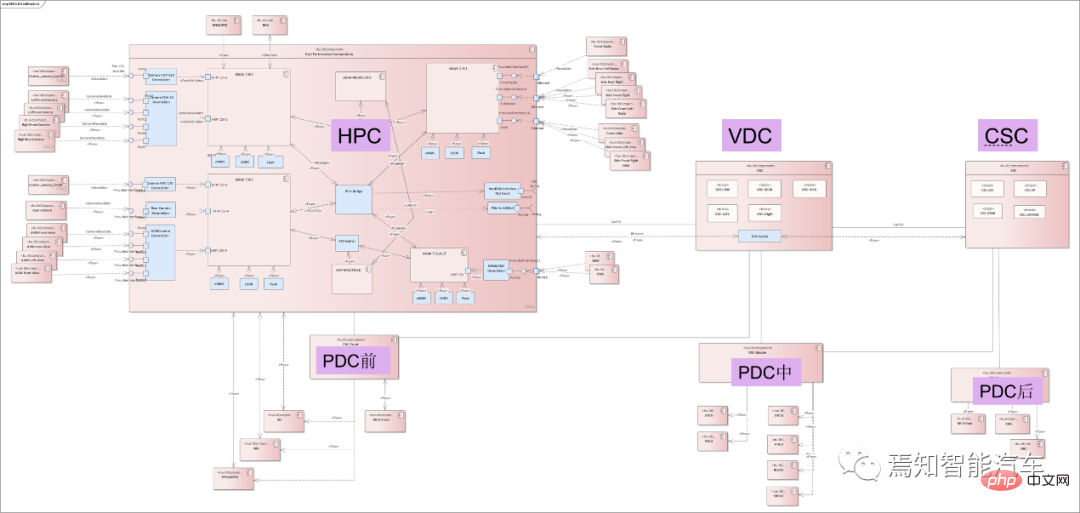 前述したように、VDC は中央ゲートウェイとして機能できるため、HPC 中心のコントローラー間同期プロセスは、HPC とコントローラー間の関係に焦点を当てます。 VDC. 同期プロセス。 VDC情報の転送により、ドメインコントローラー間の同期・通信機能を実現します。各コントローラーは、主にイーサネットベースの gPTP プロトコルを使用してイーサネット経由で直接接続されます。 HPC と VDC 間の同期プロセスでは、メイン クロックとして HPC に直接接続されている GNSS 入力の絶対時間を考慮する必要があり、時間誤差は比較的小さいです (通常は 10 ミリ秒以内)。スマート ドライビング ビッグ データ クラウド分析の精度を考慮すると、gPTP プロトコルの精度は通常 250 マイクロ秒以内である必要があるため、HPC と VDC の固定期間は精度の整数倍 (125 ミリ秒など) を使用して同期できます。
前述したように、VDC は中央ゲートウェイとして機能できるため、HPC 中心のコントローラー間同期プロセスは、HPC とコントローラー間の関係に焦点を当てます。 VDC. 同期プロセス。 VDC情報の転送により、ドメインコントローラー間の同期・通信機能を実現します。各コントローラーは、主にイーサネットベースの gPTP プロトコルを使用してイーサネット経由で直接接続されます。 HPC と VDC 間の同期プロセスでは、メイン クロックとして HPC に直接接続されている GNSS 入力の絶対時間を考慮する必要があり、時間誤差は比較的小さいです (通常は 10 ミリ秒以内)。スマート ドライビング ビッグ データ クラウド分析の精度を考慮すると、gPTP プロトコルの精度は通常 250 マイクロ秒以内である必要があるため、HPC と VDC の固定期間は精度の整数倍 (125 ミリ秒など) を使用して同期できます。
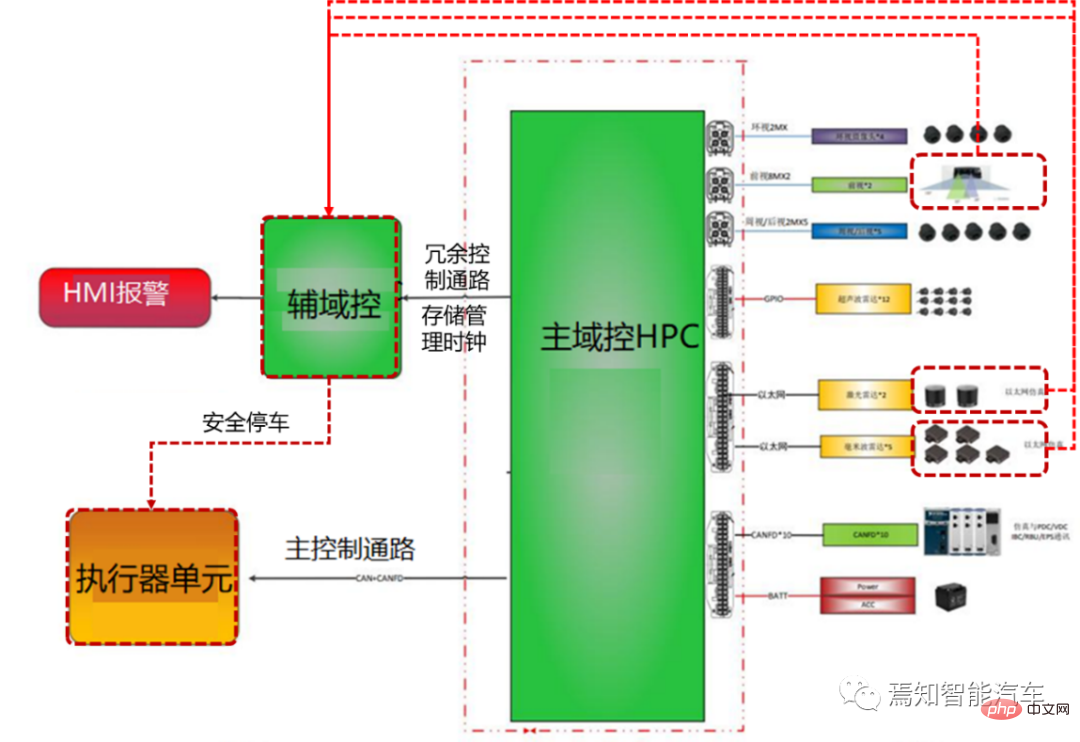
HPC ローカル ネットワーク ノードの同期プロセスとは、HPC ローカル ネットワーク ノードとセンサー間の同期プロセスを指します。自動運転プライベート内部ネットワークでは、ドメイン コントローラーがマスター ノードとして使用され、それに対応するデータの終了時刻がタイム ソースとして使用されます。 HPC は、ローカル イントラネットを通じてセンサー (ライダー、ミリ波レーダー、ドライビング カメラ、サラウンド ビュー カメラ、複合慣性航法など) に統一された時刻ソースを提供します。このプロセス中、LIDAR と複合慣性航法はイーサネット (1PPS 予約) 経由で接続され、ミリ波レーダーと超音波ボックス PDC は CANFD/イーサネット経由で接続され、カメラ (ドライビング/サラウンド ビュー カメラを含む) は GSML/LVDS 経由で接続されます。このような異なるネットワーク接続形態は、ゲートウェイとの時刻同期のためのスレーブノードとして使用されます。
主に次の 3 つの主要なセンサーが含まれています:
視覚センサー
運転制御カメラと駐車制御カメラを区別します。
運転用カメラには主にフロントビュー カメラ、サイドビュー カメラ、リアビュー カメラが含まれます。駐車場用カメラは主にサラウンドビュー カメラを指します。集中ソリューションを採用した後のカメラは次のとおりです。通常は統合されていませんが、これは機械ですが、単純なセンサーであり、入力は元の画像です。
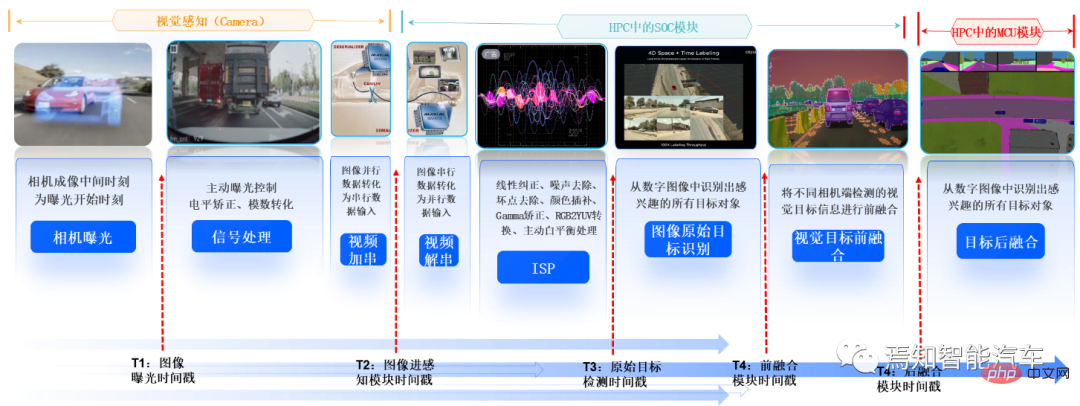
HPC とカメラは、GSML や LVDS などのビデオ データ ケーブルを介してデータを送信します。HPC は、そのデータ クロック (つまり、絶対時間ではなくシステム時間) を時間源として使用して、トリガー信号を定期的に送信します。 . トリガー信号がカメラに与えられ、カメラはリアルタイムのトリガー信号に基づいて露光時間を調整します。対応するタイムスタンプを単一のカメラに直接記録できないため、同期にはマルチカメラ同期トリガーが使用され、ドメイン コントローラーのトリガー信号が記録された瞬間が画像の最初のタイムスタンプとして使用されます。
カメラには撮像プロセス中に常にタイムスタンプが付けられます (次のように計算されます)。時間精度は 10ms 以内である必要があります。
Tmidtime Imaging middle=Ttrigger (トリガー時間) 1/2*Texposure (露光時間);
上式の露光時間が固定されています。
トリガーの瞬間はフレーム画像全体の露光の終了時であるため、タイムスタンプの精度を向上させるために、露光時間を補正して露光時間を取得する必要があります。フレーム画像全体を表す中央の行の終点時間 露光の中間瞬間; 通常、時間補正には次の式が使用されます。
Tcompensate (補償時間) = 各行の長さ × 総行数 / 2
ドメイン コントローラーの記録時間には次の時間が含まれます。 5回:カメラ撮像の中間時間、画像が知覚モジュールに入る時間、画像知覚結果が融合モジュールに入る時間、知覚融合結果が送信される時間、下流モジュールが受信する時間それ。
ライダー
現在は半固体レーザーレーダーが主に使用されています。
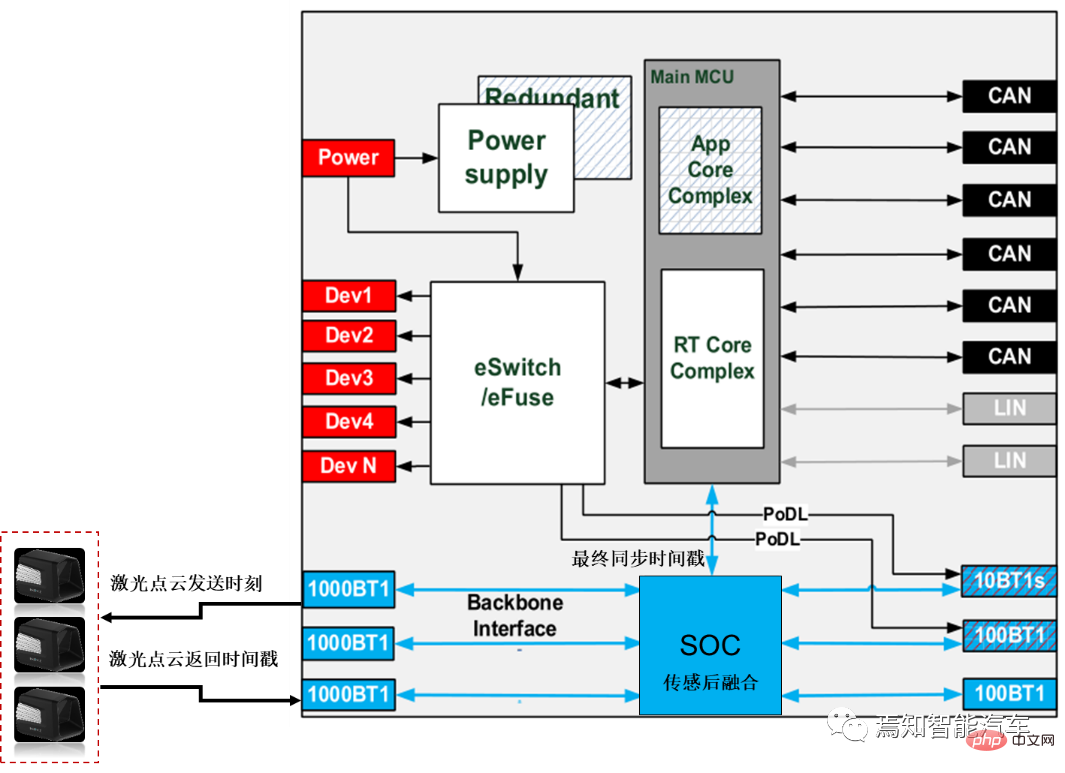
HPC と LIDAR は通常、ギガビット イーサネット直接接続と組み合わせたイーサネット gPTP プロトコルに基づいています。HPC はマスター ノード Master、LIDAR はスレーブ ノード Slave です。 HPC 同期時間ソースは絶対時間 (システム時間など) をデータ クロックとして使用し、時間同期精度の要件は依然として 250 マイクロ秒以内です。 HPC と LIDAR は、同期時間精度の整数倍 (たとえば、125 ミリ秒または 250 ミリ秒など) を使用して同期を行います。LIDAR は、この同期プロセスに従って時刻をリアルタイムで更新する必要があります。さらに、LIDAR は、センサーのタイムスタンプの時間要件として点群の各フレーム内の各点の時間を出力する必要があります (精度要件は 1ms 以内)。
同様に、ドメイン コントローラーは、LIDAR の戻り時間 (つまり、LIDAR が反射信号を受信したときに各ポイントを記録できる瞬間) に基づいてレーザー点群送信ポイントの時間を記録する必要があります。ドメイン コントローラーのタイムスタンプ (通常、この時点で LIDAR には対応する時間情報がすでに存在しており、HPC はタイムスタンプをスタンプする必要はありません)、レーザー センシング モジュールのタイムスタンプ (通常、LIDAR サプライヤーは元の点群情報を処理します。集中型ソリューションでは、HPC の SOC がフロントエンド点群センシングを担当し、独自の SOC がセンシングとバックエンド フュージョンを実行します)、センシング結果はタイムスタンプ付きでダウンストリーム モジュールに送信され、受信されます。この時点で最後のタイムスタンプをスタンプする必要があります。レーザー点群センシングの場合、ドメイン コントローラーのデータ クロックは主にセンシング アルゴリズムの設計に使用されます (このようなアルゴリズムは車上またはクラウド上にあります)。一方、絶対時間は主にローカル時間に関係し、主にデータの記録と記録に使用されます。保管サービスです。
ミリ波レーダー
主に前方ミリ波レーダーと角ミリ波レーダーを指します。
通常、フロントミリ波レーダーは単独で情報を同期しますが、角ミリ波レーダーグループ自体には、すべての情報をさらに同期するためのメインレーダーがあります。一般に、前世代の自動運転では、ミリ波レーダーの入力データはターゲットレベルのデータを使用することが一般的でしたが、次世代ドメインコントローラーが集中型ソリューションを採用した後は、3Dミリ波レーダーを4Dミリ波レーダーにアップグレードする際に、ミリ波レーダー点群を求める声はますます高まっています。この際、ミリ波レーダーには演算器がなくなり、点群データを入力するだけになります。
しかし、次世代の自動運転システムではミリ波レーダーのマイクロ波信号処理が依然として非常に難しいため、多くの OEM は依然として直接接続と時刻同期にターゲットレベルのデータを使用しています。精度要件は通常 LIDAR よりも広く、通常は 1ms 以内です。点群ミリ波レーダーが発信してからエコーを受信するまでの時間をタイムスタンプとしてマークし、その精度は1ms以内であることが求められます。
同時に、HPC とミリ波レーダーは 1 ~ 2 秒の周期間隔を設定して同期し、この間にミリ波レーダーは対応する時刻をリアルタイムに更新します。時間。同様に、ドメイン コントローラーは、ミリ波レーダーの反射時間に基づいて、次の 5 つの瞬間を含むタイムスタンプの記録をサポートします。
エコー反射点生成タイムスタンプ、ドメイン コントローラーへのエコー入力タイムスタンプ (もちろん、ターゲットレベルのデータ記録の場合、ミリ波レーダーはすでにタイムスタンプ情報を伝送しており、ファーウェイはタイムスタンプを付加しません);ミリ波レーダーから出力されたターゲット情報は、より正確なデータを取得するために、独自の反射点クラスタリングによってフィルタリングされます。タイムスタンプを取得するには、通常、下図の赤い部分に示すように、元の反射点が生成された時刻のタイムスタンプを取得する必要があります。
センシング結果は専用のSOC/MCUに送信され、タイムスタンプ付きで他のセンサーと融合されます。同様に、ドメイン コントローラーのデータ時間 (またはローカル時間) はアルゴリズム設計操作に使用され、絶対時間はデータの記録および保存操作に使用されます。
HPC は、スマート カメラとレーダー パケットの侵入瞬間に対応するタイムスタンプを追加し、ミリ波レーダー確認で使用するためのバックアップとしてセンシング モジュールにデータをタイムスタンプする必要があります。特に角度レーダーでは、角度レーダーが目標を発射できるかどうかを判断するために時間同期情報が必要です。
複合慣性航法/独立慣性航法システム
次世代の自律走行駆動システム 、OEM ごとに異なるタイプの慣性航法があり、通常は自社の研究能力に応じて、複合慣性航法と独立慣性航法の 2 つのタイプに分類されます。複合慣性航法には実際の応用状況に基づいて衛星と慣性の組み合わせアルゴリズムが組み込まれているため、ここではより単純な複合慣性航法の直接接続についてのみ説明します。 HPC はマスターノードとして機能し、複合慣性航法システムはスレーブノードとして機能し、100M イーサネットを介して複合慣性航法システムに直接接続されます。
その中で、イーサネットは依然として gPTP プロトコルに基づいています。 HPC 同期時間ソースは、同期にデータ クロック (つまり、絶対時間ではなくシステム時間) を引き続き使用します。必要な時間同期精度要件: 250 マイクロ秒以内の同期期間は、同期精度要件 (1 ミリ秒または 125 ミリ秒など) の整数倍です。この期間中、複合慣性航法は、RTK および IMU 情報に基づいて最新の IMU サンプリングのタイムスタンプを記録します。その精度は 1ms に制限されています。
さらに、IMU のサンプリング時間、HPC に入る時間、バックエンド フュージョン モジュールに入る時間はすべてタイムスタンプされます。
次世代自動運転システムでは、内部ネットワーク ノードの時刻同期に加え、それと関連するアクチュエータ (統合ブレーキ制御システム EPBi、電子ステアリング システム EPS、パワー制御システム VCU など) との間には、大量の外部情報のやり取りがあります。段階的集中制御方式を参照すると、このタイプの車両制御ポートは通常、車両コントローラ VDC を介して接続され、同期制御されます。前述したように、VDC は実際には中央ゲートウェイとみなすことができ、さまざまなドメイン コントローラーに情報を転送するだけでなく、同期タイムスタンプ全体の定義と送信も行います。車両システム全体の絶対時間は、自動運転システムのドメイン コントローラー HPC に接続された GNSS/GPS から取得されるためです。
関連システムは通常、車両ドメイン制御ポート (VDC) を通じて独立した時刻同期制御を実行するため、通常、HPC と ESP、EPS、および VCU の間に直接のマスター/スレーブ接続はありません。この種のノード間の時刻同期関係では、命令の実行中にそれぞれのタイムスタンプが VDC コントローラーに直接送信され、実行中に時間調整が行われます。
自動運転システム全体の時刻同期プロセスは依然として対応しています障害制御ロジックを考慮する必要があります。 AIチップSOCとそれに含まれるロジックチップMCUが担うさまざまな機能を考慮します。通常、両方に障害が発生すると、さまざまな時点である程度の機能低下が発生します。このような機能低下を部分的機能低下といいます。部分的な機能低下中、SOC の一部に障害が発生した場合、MCU は水晶発振器のメンテナンス時間を通じてセンサーと同期します。この期間中、Radar および他の SOC によって渡されたカメラ ターゲット データ情報は引き続き受信でき、出力タイムスタンプは安定したままです。したがって、部分的な機能ダウングレード後も、システムは短期間で応答に元のタイムスタンプを使用し、MCU は元の時刻データの安定性を維持できる (時刻同期プロセスを実行できる) と言えます。 MCUの内部クロックを基準に出力)を行い、機能の動作をサポートします。誤差は短期間では非常に小さいため、この期間内に時刻が同期されないリスクも非常に小さくなります。
もちろん、HPC 全体に障害が発生した場合は、別のバックアップ コントローラーが必要になります (別のロープロファイル バージョンの HPC を使用することも、別のバックアップ コントローラーを使用することもできます)。セキュリティ制御用に追加のスマート カメラ (Smart Camera) を追加します。このプロセス中に、バックアップ コントローラーと対応するセンサーの間の時刻同期関係を再確立する必要があります。
もう 1 つの故障モードは、電源障害による機能低下です。ここで、ドメイン コントローラーにはディープ スリープとライト スリープという 2 つのスリープ モードがあることに注意してください。このスリープモードは主に全体の電源を遮断するかどうかに関係します。コントローラーがディープ スリープ状態にある場合、データ クロックは、タイミングを変更せずに、最後の電源オフ時に保存された管理クロックを直接使用します。コントローラーが軽いスリープ状態にある場合、この電源オフの管理クロックがタイミングに直接使用されます。深い睡眠と比較して、浅い睡眠の同期の時計結果はより正確です。もちろん、スリープがどれほど深くても浅くても、この期間中はコントローラーのクロックは常に無効になり、すべてのソフトウェアは正常に実行できません。もちろん、浅い睡眠から深い睡眠までの全体の変換時間はカスタマイズ可能です(12時間など)。
本稿では、次世代自動運転システムの各制御ユニットの時刻同期原理を詳しく解説し、同期プロセス 各モジュールは、ローカル ネットワーク ノードの同期とグローバル ネットワーク ノードの同期を含む精度要件を提示します。このうち、ローカル ネットワーク ノードの同期は、主に自動運転システム内のセンサーとドメイン制御の間の同期関係を目的としています。グローバルネットワークノード同期は、主に自動運転システムと外部関連システム(ブレーキ、ステアリング、電源、ドア、照明、ゲートウェイなどの制御)との間の時間同期関係を目的としています。
全体的な計算精度を高めるには、ローカル ネットワーク ノードの同期が重要です。これは、多くのセンサー ユニットが関係しており、各センサー ユニットが実際の状況に基づいて対応するタイムスタンプを持っている必要があり、最後にドメイン コントローラーが要約を実行するためです。 . 同期します。グローバル ネットワーク ノードの同期では、各サブドメイン コントローラーと HPC の間の情報のやり取りを参照することで、時刻情報を簡単に交換できます。ここで、システム全体の絶対時刻は GNSS システムから取得され、通常は HPC または CSC によって接続および入力できることに注意してください。
以上が自動運転システム向けの超包括的なシステム時刻同期ソリューションの設計をレビューする 1 つの記事の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
















![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



