

凸集合への投影 (POCS) に基づくクラスタリング アルゴリズム

POCS: 凸集合への投影。数学では、凸集合とは、任意の 2 点間の任意の線分が集合内に含まれる集合です。投影は、点を別の空間の部分空間にマッピングする操作です。凸集合と点が与えられると、凸集合への点の投影を見つけることによって操作できます。投影は、凸集合内の点に最も近い点であり、この点と凸集合内の他の点との間の距離を最小化することによって計算できます。これは投影であるため、特徴を別の空間の凸セットにマッピングして、クラスタリングや次元削減などの操作を実行できます。
この記事では、凸集合射影法に基づくクラスタリング アルゴリズム、つまり POCS に基づくクラスタリング アルゴリズムをレビューします。原論文はIWIS2022で発表されました。
凸集合
凸集合はデータ点の集合として定義され、集合内の任意の 2 点 x1 と x2 を結ぶ線分が完全にこの集合に含まれます。凸集合の定義によれば、空集合∅、ユニタリー集合、線分、超平面、ユークリッド球はすべて凸集合とみなされます。データ ポイントはシングルトン セット (要素が 1 つだけあるセット) であるため、凸セットともみなされます。これにより、POCS の概念をクラスター化されたデータ ポイントに適用するための新しい道が開かれます。
凸集合の射影 (POCS)
POCS 手法は、交互と並列の 2 つのタイプに大別できます。
1. 交互の poc
データ空間内の任意の点から開始して、この点から 2 つ (またはそれ以上) の交差する凸セットへの交互投影は、セットの交点 1 つの点に収束します。次の図のように:
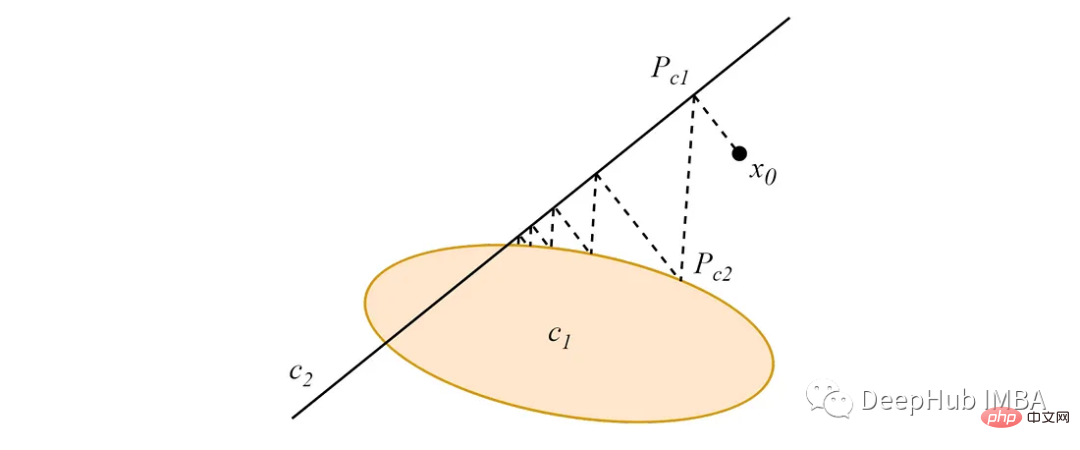
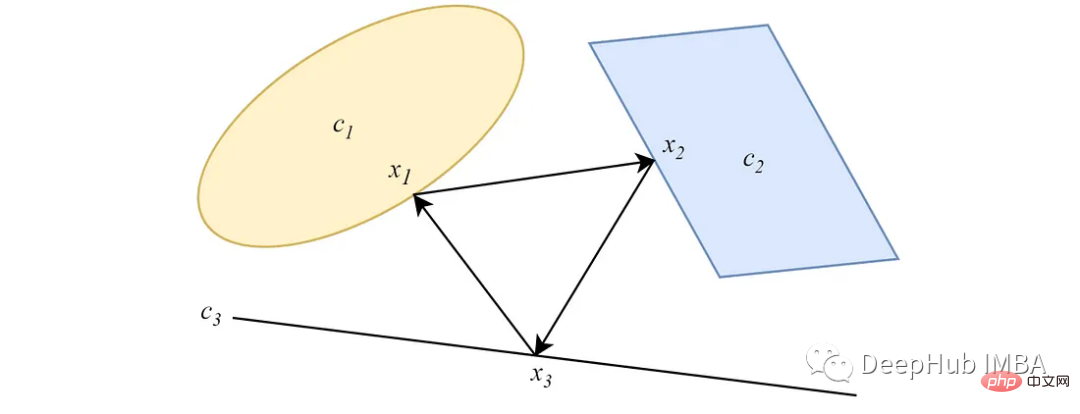
凸集合が交差しない場合、交互投影は投影順序に依存する貪欲なリミット サイクルに収束します。
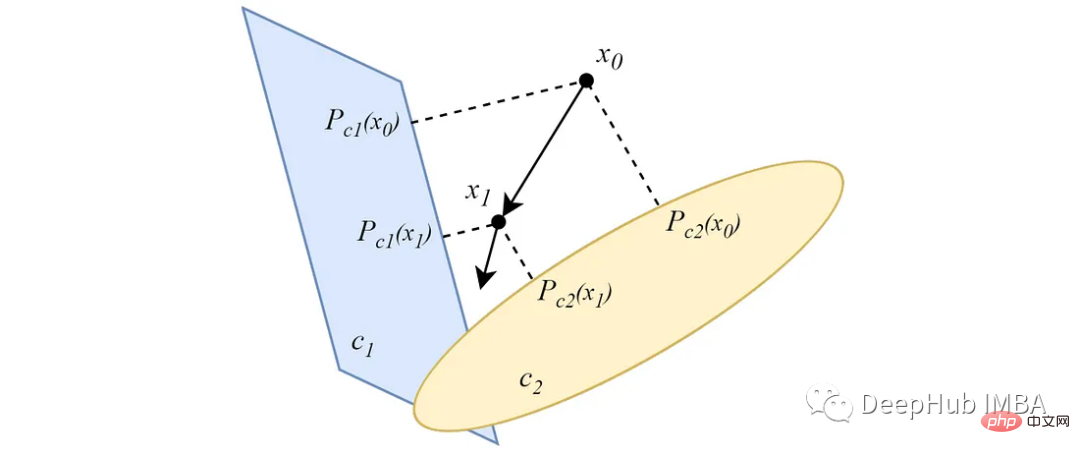
2. 並列 POCS
交互形式とは異なり、並列 POCS プロジェクトはデータ ポイントからすべての凸セットに同時にプロジェクトされ、各投影にはすべて重要性があります。重さ。 2 つの空でない交差する凸セットの場合、交互バージョンと同様に、平行投影はセットの交点の点に収束します。
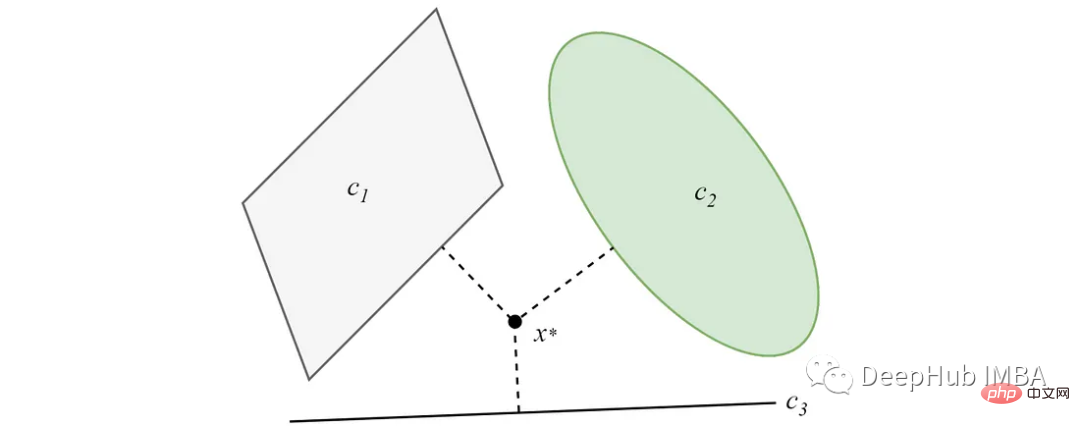
凸集合が交差しない場合、射影は最小解に収束します。 POC ベースのクラスタリング アルゴリズムの主なアイデアは、この機能から来ています。
POCS の詳細については、元の論文を参照してください。
pocs に基づくクラスタリング アルゴリズム
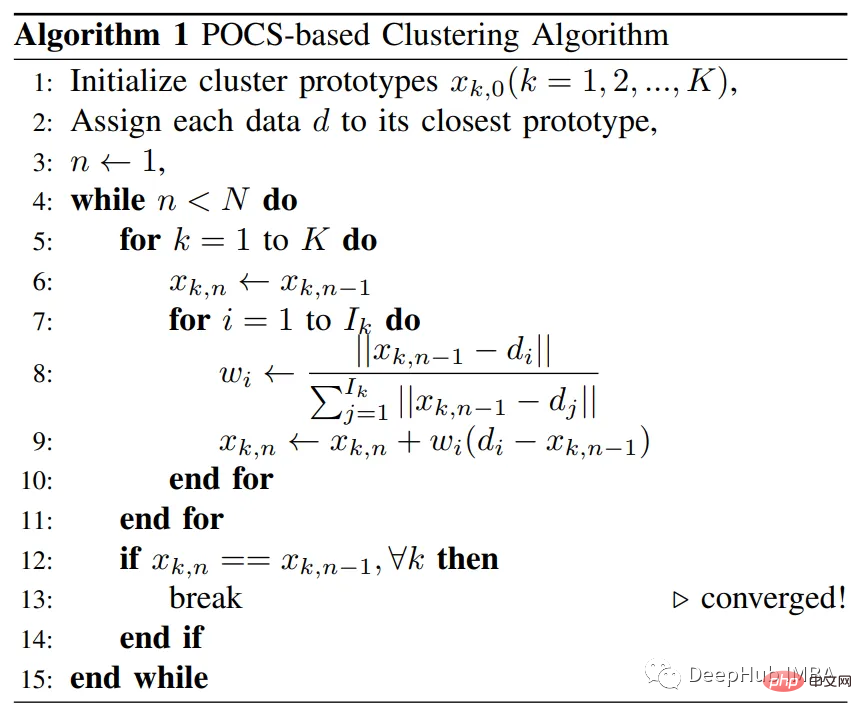
並列の収束を使用するPOCS 手法の特性を利用して、論文の著者は非常にシンプルだがある程度効果的なクラスタリング アルゴリズムを提案しました。このアルゴリズムは古典的な K-Means アルゴリズムと同様に機能しますが、各データ ポイントの処理方法に違いがあります。K-Means アルゴリズムは各データ ポイントの重要度の重み付けが同じですが、POC ベースのクラスタリング アルゴリズムは各データ ポイント重要度は異なる重み付けされ、クラスター プロトタイプからのデータ ポイントの距離に比例します。
アルゴリズムの疑似コードは次のとおりです。
実験結果
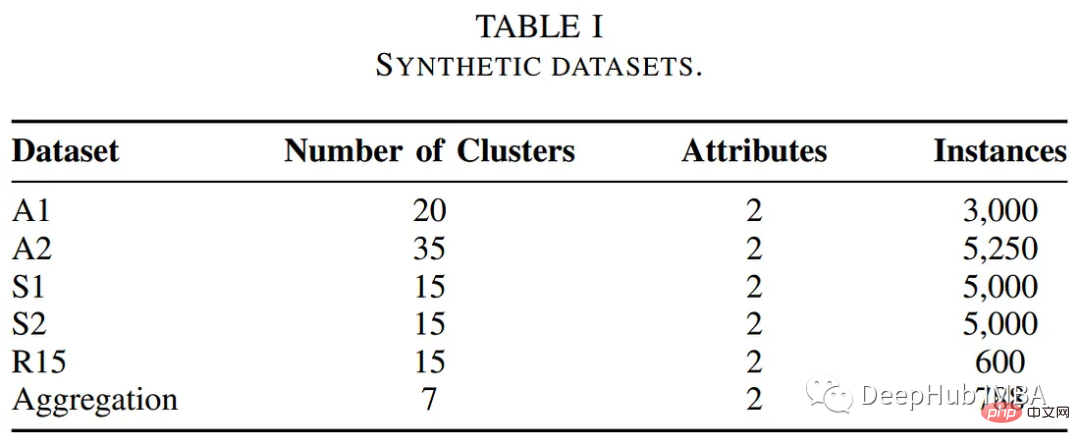
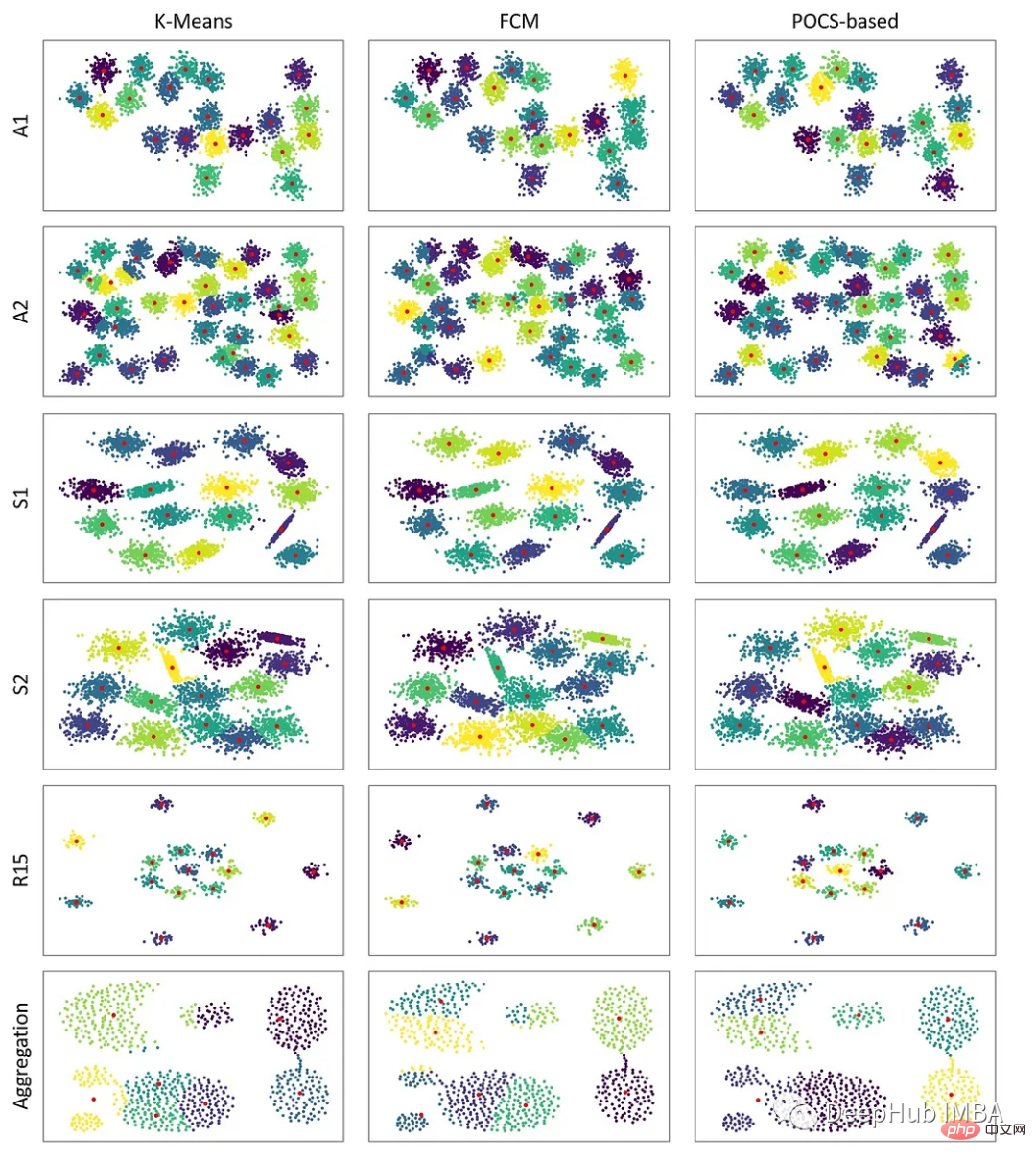
著者は、いくつかの公開環境で POC ベースのアルゴリズムをテストしました。ベンチマーク データ セット クラスタリング アルゴリズムのパフォーマンス。以下の表は、これらのデータセットの説明をまとめたものです。
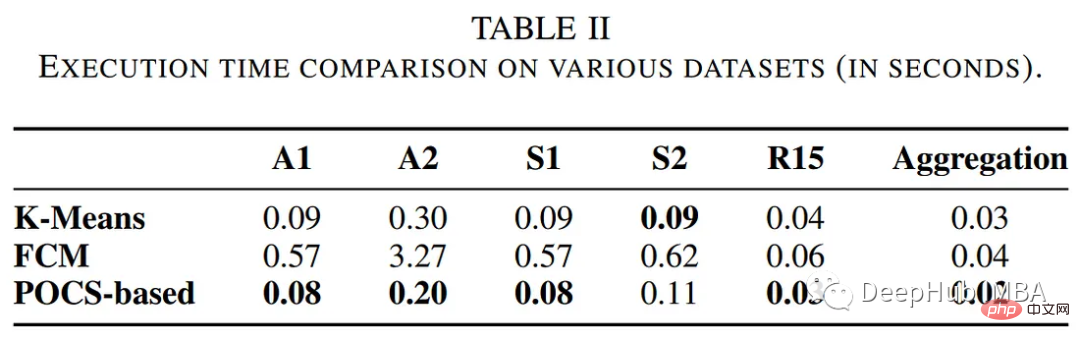
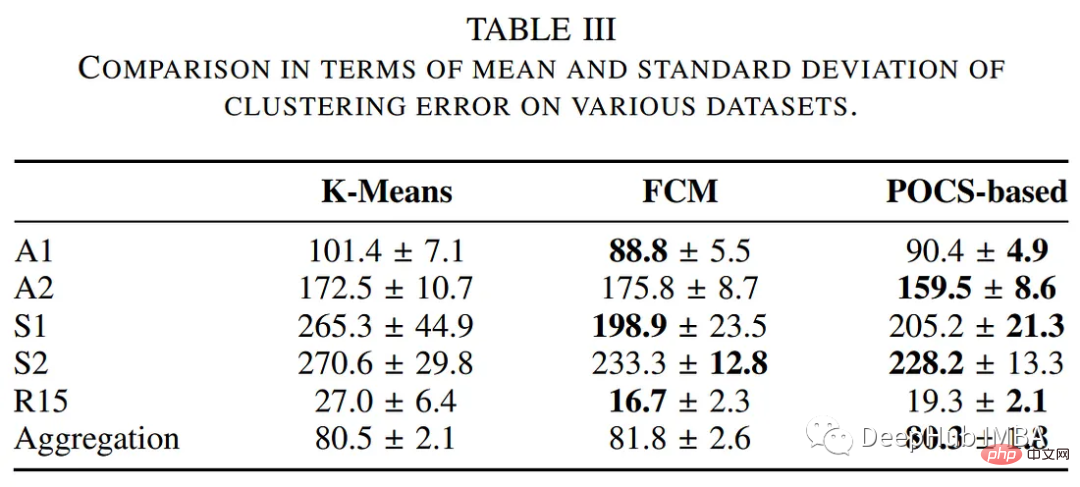
著者らは、POC ベースのクラスタリング アルゴリズムのパフォーマンスを、K 平均法やファジー C 平均法などの他の従来のクラスタリング手法と比較しました。次の表は、実行時間とクラスタリング誤差の観点からの評価をまとめたものです。
pip install pocs-based-clustering
# Import packages import time import matplotlib.pyplot as plt from sklearn.datasets import make_blobs from pocs_based_clustering.tools import clustering # Generate a simple dataset num_clusters = 10 X, y = make_blobs(n_samples=5000, centers=num_clusters, cluster_std=0.5, random_state=0) plt.figure(figsize=(8,8)) plt.scatter(X[:, 0], X[:, 1], s=50) plt.show()
# POSC-based Clustering Algorithm centroids, labels = clustering(X, num_clusters, 100) # Display results plt.figure(figsize=(8,8)) plt.scatter(X[:, 0], X[:, 1], c=labels, s=50, cmap='viridis') plt.scatter(centroids[:, 0], centroids[:, 1], s=100, c='red') plt.show()

总结
我们简要回顾了一种简单而有效的基于投影到凸集(POCS)方法的聚类技术,称为基于POCS的聚类算法。该算法利用POCS的收敛特性应用于聚类任务,并在一定程度上实现了可行的改进。在一些基准数据集上验证了该算法的有效性。
论文的地址如下:https://arxiv.org/abs/2208.08888
作者发布的源代码在这里:https://github.com/tranleanh/pocs-based-clustering
以上が凸集合への投影 (POCS) に基づくクラスタリング アルゴリズムの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7480
7480
 15
1377
52
77
11
19
33
15
1377
52
77
11
19
33

 CLIP-BEVFormer: BEVFormer 構造を明示的に監視して、ロングテール検出パフォーマンスを向上させます。
Mar 26, 2024 pm 12:41 PM
CLIP-BEVFormer: BEVFormer 構造を明示的に監視して、ロングテール検出パフォーマンスを向上させます。
Mar 26, 2024 pm 12:41 PM
上記および筆者の個人的な理解: 現在、自動運転システム全体において、認識モジュールが重要な役割を果たしている。道路を走行する自動運転車は、認識モジュールを通じてのみ正確な認識結果を得ることができる。下流の規制および制御モジュール自動運転システムでは、タイムリーかつ正確な判断と行動決定が行われます。現在、自動運転機能を備えた自動車には通常、サラウンドビューカメラセンサー、ライダーセンサー、ミリ波レーダーセンサーなどのさまざまなデータ情報センサーが搭載されており、さまざまなモダリティで情報を収集して正確な認識タスクを実現しています。純粋な視覚に基づく BEV 認識アルゴリズムは、ハードウェア コストが低く導入が容易であるため、業界で好まれており、その出力結果はさまざまな下流タスクに簡単に適用できます。
 C++ での機械学習アルゴリズムの実装: 一般的な課題と解決策
Jun 03, 2024 pm 01:25 PM
C++ での機械学習アルゴリズムの実装: 一般的な課題と解決策
Jun 03, 2024 pm 01:25 PM
C++ の機械学習アルゴリズムが直面する一般的な課題には、メモリ管理、マルチスレッド、パフォーマンスの最適化、保守性などがあります。解決策には、スマート ポインター、最新のスレッド ライブラリ、SIMD 命令、サードパーティ ライブラリの使用、コーディング スタイル ガイドラインの遵守、自動化ツールの使用が含まれます。実践的な事例では、Eigen ライブラリを使用して線形回帰アルゴリズムを実装し、メモリを効果的に管理し、高性能の行列演算を使用する方法を示します。
 C++sort 関数の基礎となる原則とアルゴリズムの選択を調べる
Apr 02, 2024 pm 05:36 PM
C++sort 関数の基礎となる原則とアルゴリズムの選択を調べる
Apr 02, 2024 pm 05:36 PM
C++sort 関数の最下層はマージ ソートを使用し、その複雑さは O(nlogn) で、クイック ソート、ヒープ ソート、安定したソートなど、さまざまなソート アルゴリズムの選択肢を提供します。
 人工知能は犯罪を予測できるのか? CrimeGPT の機能を調べる
Mar 22, 2024 pm 10:10 PM
人工知能は犯罪を予測できるのか? CrimeGPT の機能を調べる
Mar 22, 2024 pm 10:10 PM
人工知能 (AI) と法執行機関の融合により、犯罪の予防と検出の新たな可能性が開かれます。人工知能の予測機能は、犯罪行為を予測するためにCrimeGPT (犯罪予測技術) などのシステムで広く使用されています。この記事では、犯罪予測における人工知能の可能性、その現在の応用、人工知能が直面する課題、およびこの技術の倫理的影響について考察します。人工知能と犯罪予測: 基本 CrimeGPT は、機械学習アルゴリズムを使用して大規模なデータセットを分析し、犯罪がいつどこで発生する可能性があるかを予測できるパターンを特定します。これらのデータセットには、過去の犯罪統計、人口統計情報、経済指標、気象パターンなどが含まれます。人間のアナリストが見逃す可能性のある傾向を特定することで、人工知能は法執行機関に力を与えることができます
 Go 言語でコレクションのような関数を実装するのはなぜ難しいのでしょうか?
Mar 24, 2024 am 11:57 AM
Go 言語でコレクションのような関数を実装するのはなぜ難しいのでしょうか?
Mar 24, 2024 am 11:57 AM
Go 言語ではコレクションのような関数を実装するのが難しく、多くの開発者を悩ませている問題です。 Python や Java などの他のプログラミング言語と比較して、Go 言語には set や map などの組み込みのコレクション型が存在しないため、コレクション関数を実装する際に開発者にいくつかの課題が生じます。まず、コレクションのような機能を Go 言語で直接実装することがなぜ難しいのかを見てみましょう。 Go 言語で最も一般的に使用されるデータ構造はスライスとマップであり、コレクションのような関数を完成させることができますが、
 改良された検出アルゴリズム: 高解像度の光学式リモートセンシング画像でのターゲット検出用
Jun 06, 2024 pm 12:33 PM
改良された検出アルゴリズム: 高解像度の光学式リモートセンシング画像でのターゲット検出用
Jun 06, 2024 pm 12:33 PM
01 今後の概要 現時点では、検出効率と検出結果の適切なバランスを実現することが困難です。我々は、光学リモートセンシング画像におけるターゲット検出ネットワークの効果を向上させるために、多層特徴ピラミッド、マルチ検出ヘッド戦略、およびハイブリッドアテンションモジュールを使用して、高解像度光学リモートセンシング画像におけるターゲット検出のための強化されたYOLOv5アルゴリズムを開発しました。 SIMD データセットによると、新しいアルゴリズムの mAP は YOLOv5 より 2.2%、YOLOX より 8.48% 優れており、検出結果と速度のバランスがより優れています。 02 背景と動機 リモート センシング技術の急速な発展に伴い、航空機、自動車、建物など、地表上の多くの物体を記述するために高解像度の光学式リモート センシング画像が使用されています。リモートセンシング画像の判読における物体検出
 58 ポートレート プラットフォームの構築におけるアルゴリズムの適用
May 09, 2024 am 09:01 AM
58 ポートレート プラットフォームの構築におけるアルゴリズムの適用
May 09, 2024 am 09:01 AM
1. 58 Portraits プラットフォーム構築の背景 まず、58 Portraits プラットフォーム構築の背景についてお話ししたいと思います。 1. 従来のプロファイリング プラットフォームの従来の考え方ではもはや十分ではありません。ユーザー プロファイリング プラットフォームを構築するには、複数のビジネス分野からのデータを統合して、ユーザーの行動や関心を理解するためのデータ マイニングも必要です。最後に、ユーザー プロファイル データを効率的に保存、クエリ、共有し、プロファイル サービスを提供するためのデータ プラットフォーム機能も必要です。自社構築のビジネス プロファイリング プラットフォームとミドルオフィス プロファイリング プラットフォームの主な違いは、自社構築のプロファイリング プラットフォームは単一のビジネス ラインにサービスを提供し、オンデマンドでカスタマイズできることです。ミッドオフィス プラットフォームは複数のビジネス ラインにサービスを提供し、複雑な機能を備えていることです。モデリングを提供し、より一般的な機能を提供します。 2.58 中間プラットフォームのポートレート構築の背景のユーザーのポートレート 58
 SOTA をリアルタイムで追加すると、大幅に増加します。 FastOcc: より高速な推論と展開に適した Occ アルゴリズムが登場しました。
Mar 14, 2024 pm 11:50 PM
SOTA をリアルタイムで追加すると、大幅に増加します。 FastOcc: より高速な推論と展開に適した Occ アルゴリズムが登場しました。
Mar 14, 2024 pm 11:50 PM
上記と著者の個人的な理解は、自動運転システムにおいて、認識タスクは自動運転システム全体の重要な要素であるということです。認識タスクの主な目的は、自動運転車が道路を走行する車両、路側の歩行者、運転中に遭遇する障害物、道路上の交通標識などの周囲の環境要素を理解して認識できるようにすることで、それによって下流のシステムを支援できるようにすることです。モジュール 正しく合理的な決定と行動を行います。自動運転機能を備えた車両には、通常、サラウンドビューカメラセンサー、ライダーセンサー、ミリ波レーダーセンサーなど、さまざまな種類の情報収集センサーが装備されており、自動運転車が正確に認識し、認識できるようにします。周囲の環境要素を理解することで、自動運転車が自動運転中に正しい判断を下せるようになります。頭
