

インテリジェントコネクテッドカー向けのワイヤー制御シャーシテクノロジーの詳細な分析

01 コントロール・バイ・ワイヤ技術の認識
コントロール・バイ・ワイヤ技術(X by Wire)は、センサーを介してドライバーの操作動作を電気信号に変換し、トランスミッション制御は、従来の機械システムや油圧システムを置き換え、電気信号によってアクチュエータを直接制御して制御目的を達成するもので、その基本原理を図1に示します。
この技術は、1972 年にアメリカ航空宇宙局 (NASA) が打ち上げたフライ バイ ワイヤー航空機に由来します。
ここで、「X」は数式における未知の数字のようなもので、従来は機械的または油圧的に制御されていた自動車内のさまざまなコンポーネントと関連動作を表します。

#図 1 ワイヤ制御技術の基本概念図
## ワイヤー制御システムは、従来の空気圧、油圧、および機械的な接続を廃止し、センサー、制御ユニット、電磁アクチュエーターに置き換えるため、安全性、高速応答、低メンテナンスコスト、簡単かつ迅速な設置、および取り付けが容易であるという利点があります。テスト中。
インテリジェントネットワーク化ワイヤー制御技術には、主にワイヤーステアリング技術、ワイヤーブレーキ技術、ワイヤー駆動駆動技術、ワイヤー制御シフト技術、ワイヤー制御サスペンション技術などが含まれます。
#02 ステアバイワイヤシステムの認識ステアバイワイヤシステムの紹介
ステアリング バイ ワイヤー (SBW) は、インテリジェント コネクテッド ビークルが経路追跡と障害物回避を実現するために必要な主要テクノロジーであり、インテリジェント コネクテッド ビークルが自律ステアリングを実現するための優れたハードウェア基盤を提供します。アクティブな安全性と運転体験に直接影響します。ステアリングバイワイヤシステムは、従来の機械式ステアリング装置を廃止し、ステアリングホイールとステアリングホイールの間に機械的な接続がないため、車体の軽量化が可能です。道路からの衝撃を排除し、騒音を軽減し、衝撃を遮断するなどの利点があります。
ステアバイワイヤシステムの研究は海外では比較的早くから始まりました。
アメリカのデルファイ社、TRW社、日本の三菱社、ZF社、BMW社などの有名な自動車会社や自動車部品メーカーが次々と独自のSBWシステムを開発しています。別の。
TRW 社は、ステアリング ホイールとステアリング ホイールの間の機械的接続を制御信号を使用して置き換えることを最初に提案しました。
しかし、電子制御技術により、ステアバイワイヤ技術が大きく進歩したのは 1990 年代になってからです。
インフィニティの「Q50」は、ステア・バイ・ワイヤ技術を適用した初の量産モデルとなった。
Nexteerは、2017年にステアリングを握ったままステアリング操作が可能な「サイレントステアリングシステム」と「オンデマンドステアリングシステム」からなるステアリングバイワイヤシステムを開発しました。自動運転中は静止しており、インストルメントクラスター上に格納して、より広い室内空間を提供できます。
国内企業によるワイヤー制御車両の研究開始は比較的遅く、海外との差は大きく、各大学でのワイヤー制御システムの研究は主に理論。
2004年、同済大学は上海国際産業博覧会でステアバイワイヤシステムを搭載した4輪独立駆動超小型電気自動車「春輝3号」をデモンストレーションした。図 2 に示します。

ステアバイワイヤシステムの構造
ステアリングバイワイヤシステムは主に 3 つの主要部分で構成されます: ステアリングホイールモジュール、ステアリング実行モジュールとECU、および自動防止システムは、図3に示すように、障害システムや電源システムなどの補助モジュールで構成されます。

#図 3 ステアリング・バイ・ワイヤシステムの構成図
# # ステアリングホイール モジュールには、ステアリングホイール、ステアリングホイール角度センサー、トルクモーターが含まれます。
その主な機能は、ステアリングホイールの角度を測定することによってドライバーの操舵意図をデジタル信号に変換してメインコントローラーに送信すると同時に、トルク信号を受信することです。ステアリングホイールを生成するためにECUによって送信されるトルク。戻りトルクは、ドライバーに対応する路面感覚信号を提供します。
ステアリング実行モジュールには、ステアリング角センサー、ステアリング実行モーター、ステアリングモーターコントローラー、前輪ステアリングコンポーネントが含まれており、主な機能は ECU からのコマンドを受け取り、制御することです。ステアリングモーターは必要な前輪操舵を実現し、ドライバーの操舵意図に応じた車輪の切れ角を実現します。
#ECU は、収集した信号を分析および処理し、車の運動状態を判断し、トルク モーターとステアリング実行モーターに指令を送り、2 つのモーターの動作を制御します。ステアリング実行モーターは車両を完成させます。ヘディング角度を制御するために、トルクモーターはステアリングホイールのバックトルクをシミュレートし、ドライバーの運転体験を保証します。電力システムは、コントローラー、エグゼクティブモーター、その他の車両モーターへの電力供給を担当し、電力網が高負荷下でも安定して動作することを保証します。
自動フェールセーフ システムは、ワイヤー制御ステアリング システムが故障した場合に冗長な安全性を確保します。
これには、車の通常の運転を最大限に高めるために、さまざまな障害の形式とレベルに応じて処理するための一連の監視および実装アルゴリズムが含まれています。
ECU やステアリングアクチュエーターモーターなどの主要コンポーネントの故障が検出されると、故障対応 ECU が自動的に動作し、まず ECU とステアリングアクチュエーターモーターを完全に無効にするコマンドを発行します。ステアリングアクチュエータモーター、そして第二に、緊急時に故障が作動します。車両の進行方向の安全な制御を確保するためにモーターを実行します。
Infiniti Q50 ステアリングバイワイヤシステム
従来のステアリングコラムによるステアリングディスクとステアリングアクチュエータは接続されており、基本的な形式は通常の燃料車と同じですが、ステアリングコラムとステアリングアクチュエータの間に電子制御多板クラッチが接続されています。#以下の図 4 に示すように。

# 通常走行時は多板クラッチが切れており、ステアリングコラムは存在しますが、前輪に直接影響を与えることはありません。
ステアリングバイワイヤ機構が故障した緊急時のみ、多板クラッチが自動的に接続され、ステアリングホイール、ステアリングコラム、ステアリング機構が強固に接続されます。 (ラック&ピニオン機構)により、安全な走行を確保するステアリング操作を実現します。
ボッシュのステアリングバイワイヤシステム
ボッシュ このシステムは、インフィニティ Q50 のステアリング・バイ・ワイヤシステムとは大きく異なり、ボッシュが開発したステアリング・バイ・ワイヤシステムは、ステアリングコラムを完全に排除し、アッパーステアリングアクチュエータ SWA とステアリングアッパーアクチュエータからなるアッパーステアリングシステムで構成されています。完全冗長ロアステアリングアクチュエータは、SRA で構成されるロアステアリングシステムで構成されており、アッパーステアリングシステムとロアステアリングシステムの間には厳密な接続がありません。以下の図 5 に示すように。
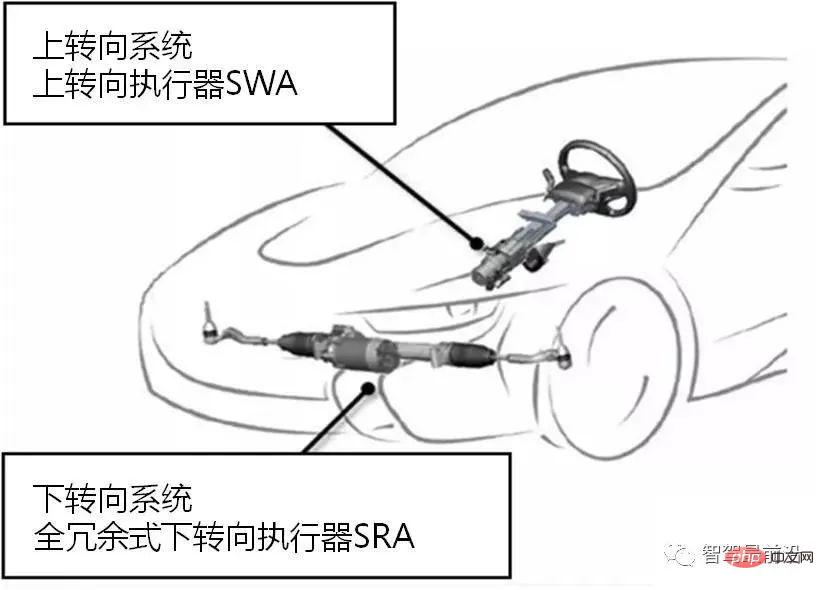 図 5 ボッシュのステアリング バイ ワイヤ システム
図 5 ボッシュのステアリング バイ ワイヤ システム
ステアリングバイワイヤシステムの仕組み
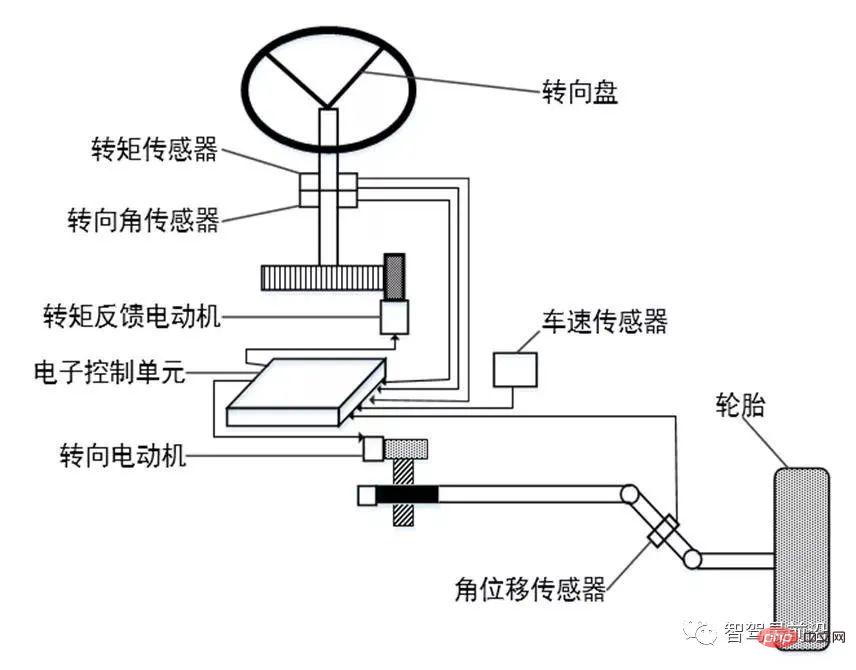
#図 6 ステアリングバイワイヤシステムの動作原理図
図に示すように、6に示すように、ステアリングバイワイヤシステムの動作原理は次のとおりです。ステアリングホイールが回転すると、ステアリングホイールトルクセンサーとステアリングホイール角度センサーが測定されたドライバートルクとステアリングホイール角度を変換します。 ECUは、ステアリング伝達機構に取り付けられた車速センサーや角変位センサーからの信号に基づいてトルクフィードバックモーターの回転方向を制御し、電気信号に基づいてフィードバックトルクを発生させます。ステアリングモーターの回転方向やトルクの大きさを制御しながら、機械式ステアリング装置によりステアリングホイールの回転角度や操舵位置を制御し、ドライバーの意図した軌道に沿って車両を走行させる操舵力シミュレーションを行います。 。
学習概要
1. ステアリング バイ ワイヤ システムは、従来の機械式ステアリング デバイスの一部をキャンセルします。ステアリングホイールとステアリングホイールの間に機械的な接続がないため、車体の重量が軽減され、道路からの衝撃が排除され、騒音が軽減され、振動が遮断されるという利点があります。
2. ステアリングバイワイヤシステムは、主にステアリングホイールモジュール、ステアリング実行モジュール、ECUの3つの主要部分と、自動フェールセーフなどの補助モジュールで構成されています。システムと電源。
#03 ドライブバイワイヤシステムの認識
ドライブバイワイヤシステムの概要
Drive By Wire (DBW) は、インテリジェント コネクテッド カーの実現に必要なキー テクノロジーであり、自動運転を実現するインテリジェント コネクテッド カーに優れたハードウェア基盤を提供します。バイワイヤースロットルまたは電子制御スロットル(スロットルバイワイヤー)。
エンジンは、ケーブルやタイロッドの代わりにワイヤーハーネスを使用し、スロットルバルブの側面に駆動モーターを取り付け、スロットルバルブを駆動して開度を変更します。クルマのさまざまな走行情報をもとに、シリンダーに入るオイルとガスの混合物を正確に調整し、エンジンの燃焼状態を改善し、クルマのパワーと経済性を大幅に向上させます。
さらに、ドライブ・バイ・ワイヤー システムにより、固定速度クルーズやアダプティブ クルーズなどの機能を自動車に実装するのがより便利になります。
ドライブ・バイ・ワイヤのシステム構造
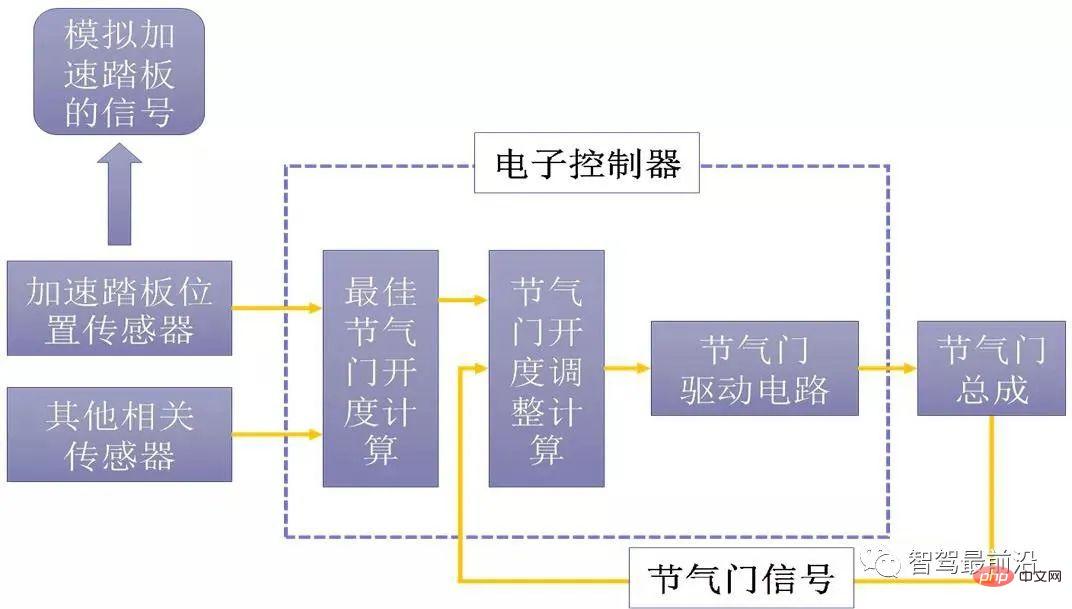
ドライブ・バイ・ワイヤスロットルシステムは主に、アクセルペダル、アクセルペダル位置センサー、ECU、データバス、サーボモーター、アクセルペダルアクチュエーターで構成されています。
アクセルペダルとスロットルバルブ間の機械構造を廃止し、アクセルペダルポジションセンサーによりアクセルペダルの絶対変位を検出するシステムです。
ECUは最適なスロットル開度を算出した後、モーターを駆動する指令を出し、最適なスロットル開度を維持するようにスロットルを制御します。以下の図 7 に示すように。
#図 7 ワイヤードライブシステム構造の概略図
ドライブ・バイ・ワイヤ・システムの分類
現在、インテリジェント・コネクテッド・カーの主なタイプに対応するドライブ・バイ・ワイヤ・システムは次のとおりです。従来の自動車ラインに分かれる 制御ドライブと電気自動車ドライブバイワイヤの 2 つのタイプがあります。
#従来の自動車用ドライブ・バイ・ワイヤー システム
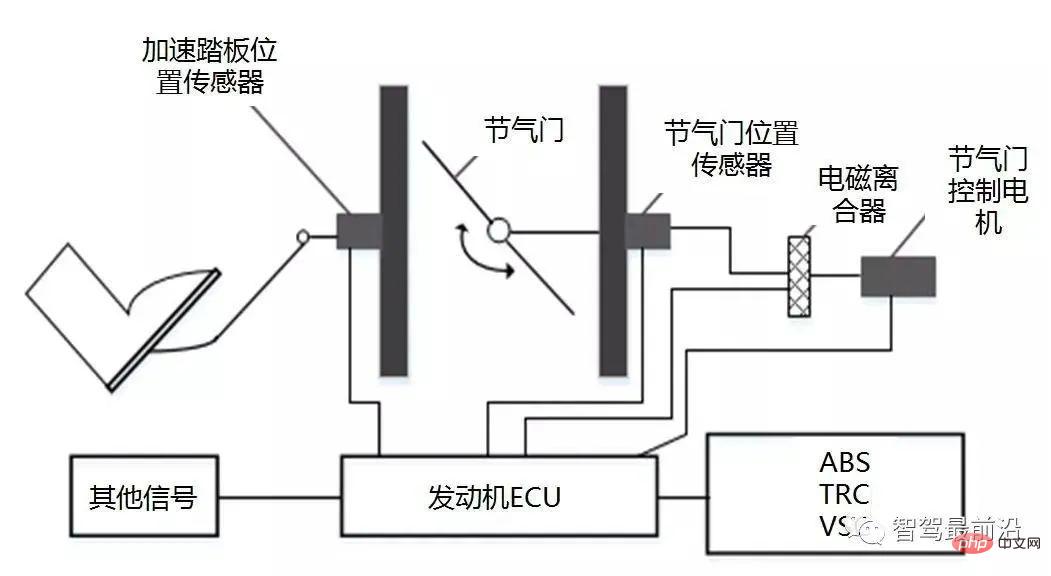
For 従来の車の場合、図 8 に示すように、アクセル ペダルの自動制御がドライブ バイ ワイヤを実現する鍵となります。主に2つの方法があります。
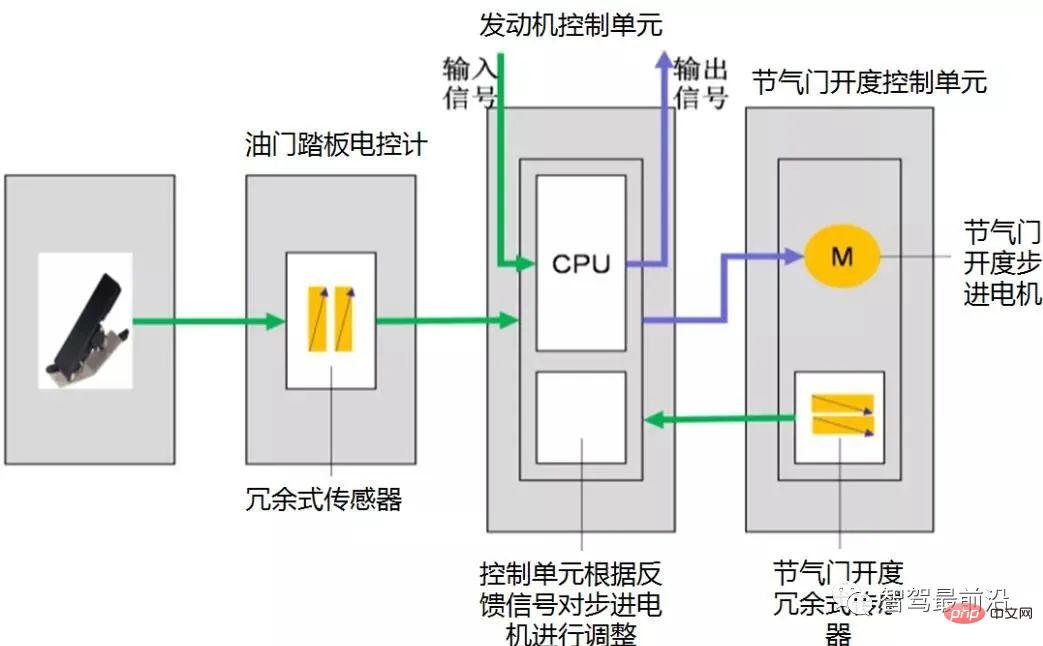
図 8 従来の自動車ドライブ・バイ・ワイヤ・システムの制御概略図 #方法 1 アクセル ペダルの位置にアクチュエータのセットを追加して、ドライバーがアクセル ペダルを踏む様子をシミュレートします。同時に、目標車速信号を入力とし、実際の車速をフィードバックする閉ループ負帰還制御システムを追加する必要があります。制御システムの計算により、アクチュエータの具体的な動作が制御されます (図 9) #方法 2 スロットル コントロール ユニットからアクセル ペダル位置信号を引き継ぐには、制御システムを追加し、目標車速信号を入力し、実際の車速をフィードバックするだけで済みます。そして最後に、制御システムはアクセルペダル位置信号を計算してスロットルコントロールユニットに出力します。 #図 9 従来の自動車ドライブ・バイ・ワイヤシステムの制御方式図 ##電気自動車ドライブ・バイ・ワイヤ・システム
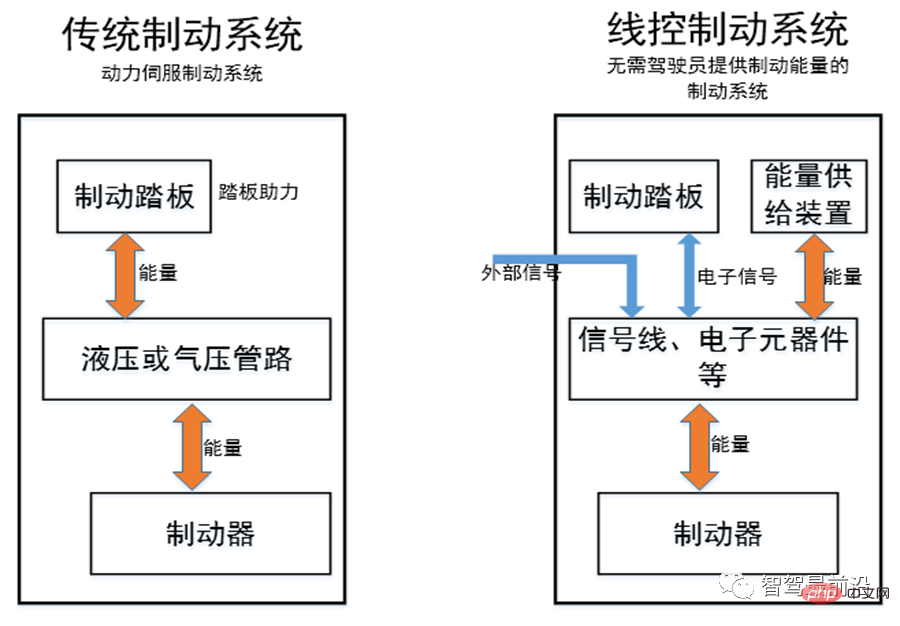
1. ドライブ・バイ・ワイヤシステムは、インテリジェントネットワーク化の実現に必要なキーテクノロジーです。運転は、ワイヤー制御スロットルまたは電子制御スロットルとも呼ばれる、優れたハードウェア基盤を提供します。 2. ドライブバイワイヤシステムは主に、アクセルペダル、アクセルペダル位置センサー、ECU、データバス、サーボモーター、アクセルペダルアクチュエーターで構成されています。 3. 車の種類に応じて、ドライブ バイ ワイヤ システムは、従来の自動車用ドライブ バイ ワイヤと電気自動車用ドライブ バイ ワイヤの 2 つのタイプに分けられます。 #04 ブレーキバイワイヤシステムの認識 Brake by Wire (BBW) は、インテリジェント ネットワーク化車両の「制御実行層」に必要な主要テクノロジーであり、インテリジェント ネットワーク化車両が自動駐車を実現するための優れたハードウェア基盤を提供します。高度な自動駐車を実現するための重要なツールであり、運転のキーコンポーネントの一つです。 本来のブレーキペダルの機械信号を改造して電子制御信号に変換し、アクセルペダル位置センサーを介してドライバーのブレーキ意思を受け取り、電子ブレーキ制御信号を生成します。制御システムやアクチュエーターに伝達され、一定のアルゴリズムに従ってペダリングフィーリングをシミュレートしドライバーにフィードバックします。 従来のブレーキ システムとブレーキ バイ ワイヤ システムの違いを図 11 に示します。F1 レーシング カーにおけるブレーキ バイ ワイヤ技術の適用は非常に成熟しています。しかし、コストと技術的な問題により、乗用車には普及していません。
初期の BMW M3 はブレーキ・バイ・ワイヤー・システムを使用していました。 ブレーキバイワイヤシステムはECUを通じて制御されるため、信頼性、耐干渉性、フォールトトレランス、およびECUの複数の制御システム間のリアルタイム通信に問題が生じる可能性があります。制御はブレーキバイワイヤシステムの適用と推進に影響を与え、制限します。 #ブレーキバイワイヤシステムの分類、構成と原理
##電子油圧ブレーキシステム EHB 電子油圧ブレーキシステム EHBはElectronic Hydraulic Brakeの略で、従来の油圧ブレーキシステムを発展させたものです。 しかし、従来のブレーキ方式との違いは、EHB が元の機械部品の一部を電子部品に置き換え、電子システムと油圧システムを組み合わせた、高度な電気機械および油圧統合システムであることです。アクチュエーターは中央に配置されています。 ブレーキ力を伝達する媒体としてブレーキフルードを使用するため、湿式集中ブレーキシステムとも呼ばれます。 EHB は主に電子ペダル、電子制御ユニット (ECU)、油圧アクチュエーターなどの部品で構成されています。 電子ペダルは、ブレーキペダルとペダルセンサー(ペダル変位センサー)で構成されています。 #アクセルペダルポジションセンサーは、ペダルストロークを検出し、その変位信号を電気信号に変換してECUに送信し、ペダルストロークと比例制御を実現します。制動力。図 13 に示すように。 #図 13 電子油圧ブレーキシステム (EHB) 構造図 EHB は、ABS (アンチロック ブレーキ システム)、ESP (エレクトロニック スタビリティ システム)、TCS (トラクション コントロール システム) などの機能モジュールをソフトウェアによって統合し、運転の安全性をさらに向上させることができます。そして快適さ。ブレーキが水に入った場合、EHB システムは適切なブレーキ動作によりブレーキの乾燥状態を回復し、ブレーキの作動性能を維持します。 従来の油圧または空気圧ブレーキ システムと比較して、EHB システムはブレーキ システムの安全性を高め、オンライン ブレーキ システムが故障した場合でも車両にブレーキをかけることができます。ただし、バックアップ システムには依然として複雑なブレーキ液伝達パイプラインが含まれているため、EHB はブレーキ バイ ワイヤ システムの利点を十分に活用できません。
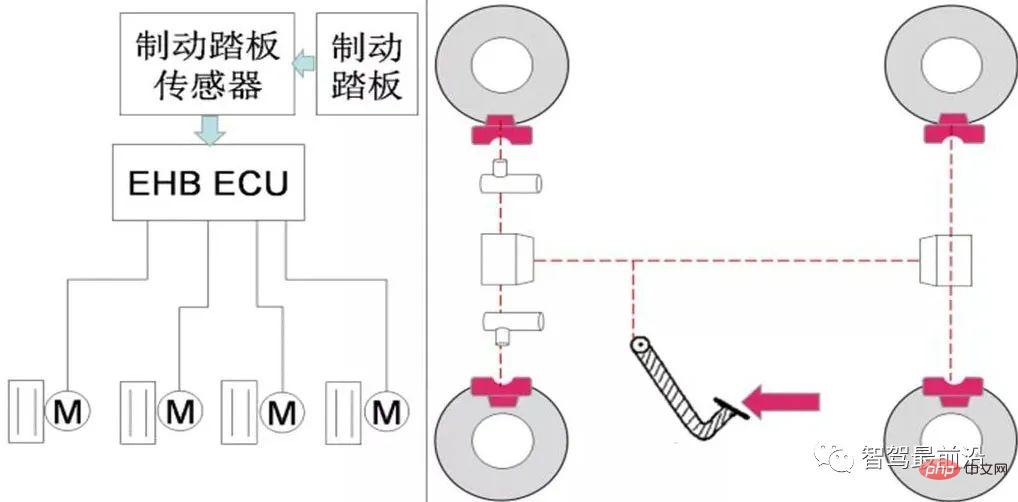
電子機械ブレーキ システム EMB EMB は構造が非常にシンプルでコンパクトなので、ブレーキシステムのレイアウト、組立、メンテナンスが非常に便利であり、また、一部のブレーキ部品の軽量化により重量も軽減されます。大きな利点は、ブレーキ液が不要になることで、自動車シャーシの使用、作業、メンテナンス環境が大幅に改善されることです。
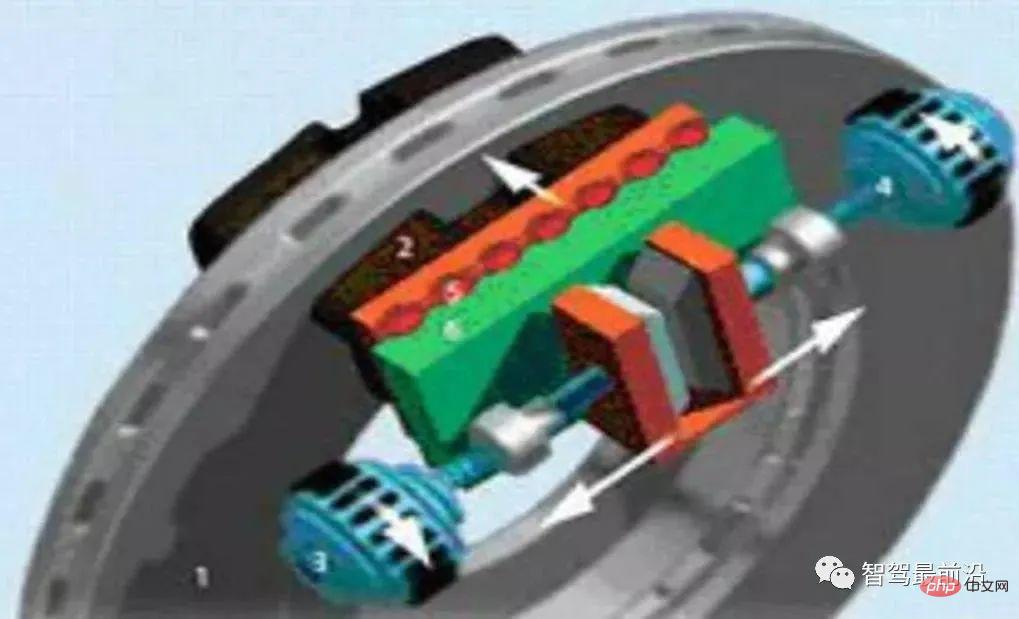
# #EMB が動作すると、ブレーキ コントロール ユニット ECU はブレーキ ペダルからのペダル ストローク信号を受信し、ブレーキ ペダルの速度信号を計算し、車速や加速度などの他の電気信号と組み合わせて車の運転状態と各車輪のブレーキ要求に応じて、各車輪の最適なブレーキトルクが計算され、対応する制御信号が出力されて、各車輪の電気機械ブレーキの作動モーターの電流サイズと回転角度がそれぞれ制御されます。電気機械ブレーキの減速により、トルクと運動方向が変換され、モーターの回転がブレーキキャリパーブロックのクランプに変換され、十分な制動摩擦トルクが発生します。 EMB システムの重要なコンポーネントの 1 つは電気機械ブレーキです。これは、ECU を流れる出力電流の大きさと方向を変更して、モーターのトルクと動作方向を変更し、モーターの回転を変換します。モーターシャフトをブレーキキャリパーブロックに挿入すると、摩擦板の摩耗によって生じるブレーキクリアランスの変化を補償するために、対応する機構または制御アルゴリズムが使用されます。電気機械式ブレーキは、その構造的特徴と動作原理に応じて、非自己増強ブレーキと自己増強ブレーキの 2 つのカテゴリに分類できます。 非自己増加ブレーキ: 電気モーターは、減速してトルクを増加させる機械的アクチュエーターを介してブレーキ ディスクに作用するクランプ力を生成します。ブレーキ トルクはブレーキ ディスクの間に発生します。圧力と摩擦係数は直線的な正の相関関係にあり、駆動モータ軸の回転角を制御することで制動トルクを制御でき、制御系が比較的簡単で、ブレーキの作動性能が安定しています。ただし、モーターの電力要件が高いため、サイズは比較的大きくなります (図 15 に示すように大きい)。 図 15 非自励ブレーキの構造図 #自己増力ブレーキ: ブレーキ ディスクとブレーキ キャリパー ブロックの間にウェッジを追加します。ブレーキが作動すると、ブレーキ ディスクの摩擦によってウェッジがブレーキ ディスクとブレーキ キャリパー ブロックにさらに食い込みます。 、クランプ力を増加させ、それによって自己増加力効果とより強力なブレーキ性能を生み出します。このシステムはモーターの出力が小さく、装置の容積や重量も小さいですが、ブレーキの効率はウェッジの作動状態に依存するため、ウェッジの技術と精度は非常に高く、加工は難しく制動は安定しているが、性感は比較的悪くコントロールが難しい。図 16 に示すように。 図 16 自励ブレーキの構造図
ブレーキバイワイヤシステムの特徴 3) ブレーキバイワイヤシステムは ABS モードでの反動振動がなく、静寂をなくすことができる; 4) ワイヤー 制御ブレーキ システムにより、電子パーキング、アンチロック ブレーキ、制動力配分などの追加機能の統合が容易になります;
学習概要 2. 異なる動作原理に応じて、ブレーキバイワイヤ制御技術は電子油圧ブレーキシステム (EHB) と電気機械ブレーキシステム (EMB) の 2 つのタイプに分類されます。 3. EHB は、Electronic Hydraulic Brake の略称で、従来の油圧ブレーキ システムを発展させたものですが、従来のブレーキ方式の制御とは大きく異なり、オリジナルのブレーキ システムを電子部品で置き換えたものです。一部の機械コンポーネントは電子システムと油圧システムを組み合わせて、比較的集中的に配置された制御ユニットとアクチュエータを備えた高度な電気機械および油圧統合システムを形成します。 ブレーキ力を伝達する媒体としてブレーキ液を使用するため、集中湿式ブレーキシステムとも呼ばれます。 4. EMB (Electronic Mechanical Brake の略称) は、従来のブレーキ システムのブレーキ液と油圧パイプラインを完全に放棄したまったく新しい設計コンセプトに基づいています。が制動力を駆動し、各車輪には独立して作動できる電気機械ブレーキが装備されており、これは分散型乾式ブレーキ システムとも呼ばれます。 シフトバイワイヤシステムの概要 Shift By Wire (SBW) システムは、既存のギアとトランスミッション間の機械的な接続構造を完全に解消し、電気的な実行によって変速動作の実行を制御する電子システムです。ワイヤ ギア シフティング システムは、従来のギア操作モードを置き換え、ノブやボタンなどの新しいインタラクティブ コンポーネントを通じて車両のギア シフトを電子的に制御し、電子ギア シフティングとも呼ばれる、インテリジェント コネクテッド ビークルの速度制御のための優れたハードウェア基盤を提供します。 シフトバイワイヤでは、従来のシフト制御機構とトランスミッションを接続するケーブルやプッシュロッドが不要になり、シフトレバーとトランスミッションの間に直接の機械的接続がないため、簡素化できます。部分構造とすることで、シフトレバーの位置や操作インターフェイス(ダッシュボード上に設置するなど)の設計が容易となり、シフト操作の軽さと操作性が向上します。 BMW モーター カンパニーは、MDKG 7 速デュアル クラッチ トランスミッションと組み合わせたシフト バイ ワイヤ システムを初めて導入し、ドライバーのシフト操作をシンプル、簡単、そして簡単なものにしました。パーキング P ギアの固着問題を解決するため、BMW グループの全シリーズに広く採用されており、ギア レバーの形状は図 17 に示すとおりです。 図 17 BMW シフトバイワイヤ システム ギア レバー
トヨタハイブリッドモデルシフトバイワイヤシステム
人間とコンピューターの対話は、シフト レバーとパーキング スイッチを通じて実現されます。 車の通常の走行では、R、N、D の 3 つのギアが関与します。ドライバーのギアレバー操作は実行電気信号に変換され、ハイブリッドに伝達されます。 HV ECUでの演算後、対応するギア信号がトランスミッションに出力され、車両の走行ギアチェンジが完了すると同時に、インパネのギアインジケーターがギア信号に応じて点灯します。 ドライバーがパーキングスイッチを操作すると、ハイブリッドシステムHV ECUは収集した実行電気信号を演算し、駐車制御ECUに送信し、駐車制御ECUはリラクタンス型センサーを通過して収集します。パーキング アクチュエータ モータ角度信号を常に検出して車両が停止状態にあるかどうかを判断し、パーキング アクチュエータ モータ角度が 0 の場合はパーキング動作が実行され、インストルメント パネルのパーキング インジケータ ライトが点灯します。制御 ECU がモーターを検出します。 コーナー信号が 0 でない場合、ハイブリッド システム HV ECU への駐車指令は拒否され、車両の駐車動作は完了できません。 実行ロジックは次のとおりです: シフトレバー→ハイブリッドECU→パーキングアクチュエーター(R、N、Dの3速)→ギアインジケーター パーキングスイッチ→ハイブリッドエンジンECU→パーキングECU→パーキングアクチュエーター(Pギア)→パーキングPインジケーター このシステムでは、変速操作が瞬時に行われ、ドライバーは簡単かつ快適に変速操作を行うことができます。 ドライバーがギアレバーを放すと、ギアレバーはすぐに初期位置に戻ります。 したがって、運転者が目標変速段に変速するために変速レバーを操作する際には、現在の変速状態を考慮する必要がなく、車両走行中に変速が完了した後は、ギア 現在のギアを正確に表示し、シフト操作が完了したことをドライバーに知らせます。トランスミッションの変速制御には電子制御システムが採用されており、各構成要素が連携して変速を行うため、人為的ミスを効果的に防止し、安全性を高めることができます。シフトECUが誤操作を検知した場合、ギアポジションを安全な範囲内に制御し、ドライバーに警告を発します。 たとえば、ドライバーがブレーキ ペダルを踏んだ場合にのみ、P ポジションから他のギアをシフトできます。車が前進しているときにドライバーがギア レバーを押した場合、車が R ポジションにある場合、シフト ECU はトランスミッションをニュートラルに配置するように制御します。車が後退している場合、ドライバーがシフト レバーを D ポジションに入れると、シフト ECU もトランスミッションがニュートラルに配置されるように制御します。ブレーキペダルをいっぱいに踏み込んだときのみ、RポジションからDポジションへのスムーズな踏み込みが可能、シフトレバーがPポジションにないことをシフトECUが検知した場合、車両が停止するように制御します。電源を遮断します。各ギヤの動作関係を表1に示します。 #表1 トヨタハイブリッド車のシフトバイワイヤ作動関係表 #Audi Q7 シフトバイワイヤシステム 現在、Audi Q7 のシフトバイワイヤシステム ギアレバーは、カバー、ギアレバー、ロック解除キー、P ポジションキー、ダストカバー、シフト操作機構カバー、シフトレンジ表示部、シフト操作機構、および複数のコネクタから構成されます。図 19 と 20 に示すように。 図 19 アウディ Q7 のシフトバイワイヤ システム # #アウディQ7のシフトバイワイヤシステムは、トヨタハイブリッド車のシフトバイワイヤシステムとは異なり、ギアレバー下部にギアポジションロックソレノイドバルブとティプトロニックギアロックモーターを内蔵し、複雑かつ安全なシフト操作をサポートします。 . ロジックとユーザーの体性感覚の相互作用。図 21 に示すように。 変速レバーは前後2段階に可動し、Dポジションに入るとロックレバーを介して下部の変速位置ロックソレノイドバルブによりロックされます。 。このとき、ギアレバーは後退のみで D/S ポジションを切り替えることができますが、前進して N/R ポジションに切り替えることはできません。ギアレバーの位置を効果的かつ正確に識別するために、シフトバイワイヤシステムには複数の位置センサーが装備されており、自動ギア位置とティプトロニックギア位置、およびラテラルロックを感知するために使用されます。ギアレバーの位置により、ギア位置またはシフトに基づいてギアシフトロジックが特定のギアシフト動作を実行します。
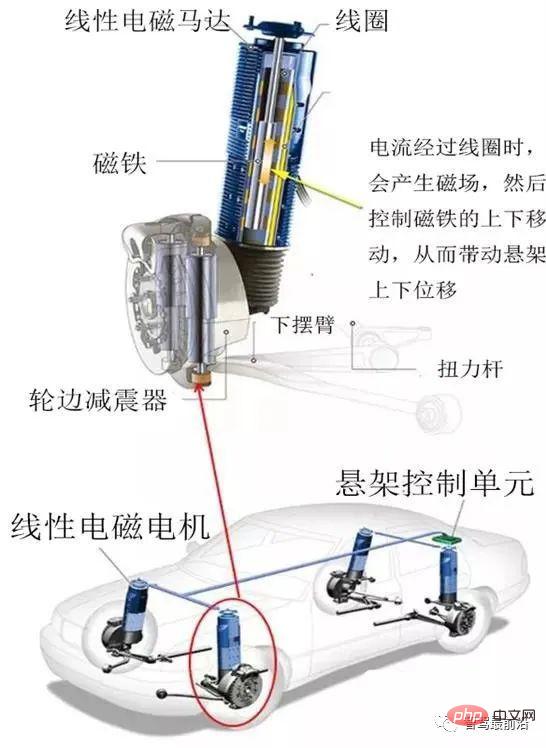
学習の概要 1. Shift By Wire (SBW) は、従来のシフトシステムを完全にキャンセルした機械式トランスミッション構造であり、電子制御のみで車両のシフトを実現できます。インテリジェントなシステムです。コネクテッドカーは優れたハードウェア基盤を提供します。電子シフトとも呼ばれる速度制御用。 2. シフトバイワイヤシステムは主に、シフト操作機構、シフトECU、シフト実行モジュール、駐車制御ECU、ギアインジケーターで構成されます。 3. トランスミッションの変速制御には電子制御システムを採用しているため、各構成要素が連動して変速を実現し、人為的ミスを効果的に防止します。 #ECU が誤操作を検知した場合、ギア位置を安全な範囲内に制御し、ドライバーに警告を発します。 ワイヤー制御サスペンションシステムの紹介 1980 年、BOSE は電磁アクティブ サスペンション システムの開発に成功しました。 1984 年に電子制御エア サスペンションが登場し始め、リンカーンは調整可能なワイヤー制御エア サスペンション システムを採用した最初の車となりました。現在、BMW 車に搭載されている「マジック カーペット」サスペンション システム、キャデラック車に搭載されている MRC アクティブ電磁サスペンション システム、およびアダプティブ エア サスペンション システムは、すべて異なる形式のワイヤー制御サスペンション システムです。メルセデス・ベンツの新世代Sクラスに採用されたワイヤー制御サスペンションシステム「MAGIC BODY CONTROL」は、前方の路面状況に応じてショックアブソーバーの減衰係数や車高などの車両パラメータを自動的に調整することができ、サスペンションの剛性やサスペンションの剛性などの重要なパラメータを自動的に調整することができます。ダンピングは車の荷重と走行条件に従い、速度とともに変化します。図 22 に示すように。
ワイヤー制御サスペンション システムは、図 23 に示すように、主にモード選択スイッチ、センサー、ECU、アクチュエーターで構成されています。
車の走行状況(主に凹凸状況)、車速、発進、加速、ステアリング、ブレーキなどの動作状況を収集し、電気信号に変換するセンサーです。これらは簡単な処理の後、ワイヤー制御のサスペンション ECU に送信されます。その中で、主に車両加速度センサー、車高センサー、速度センサー、コーナーセンサーなどの重要なセンサーが関係します。空気ばねは、シリンダ内のガス質量、ガス圧力、ソレノイドバルブ設定圧力などの主要パラメータの変化を含むECUの制御信号に従って正確、迅速かつタイムリーに反応し、本体のばね剛性、ショックアブソーバの変化を実現します。ダンピングとボディ、車高調整。ワイヤー制御サスペンションシステムのアクチュエーターは、主にアクチュエーター、ダンパー、ソレノイドバルブ、ステッピングモーター、エアポンプモーターなどで構成されています。
##図 24 ワイヤー制御サスペンションシステムの ECU 制御図 ショックアブソーバーのダンピングとスプリングの剛性の制御は、主にさまざまな作業条件下でのボディの安定性と快適性を保証します。具体的な作業条件には、アンチロール制御、アンチノディング制御、アンチスクワット制御、および高負荷が含まれます。図25に示すような速度制御、路面の凹凸制御など。 図 25 典型的なワイヤー制御サスペンション システムの動作原理の概略図 車高の制御は主に、車体の水平方向の高さ、静状態制御、走行状態制御、自動レベル制御などを含む。静的状態制御とは、車両が停止しているときに、乗員や荷物などの要因による車両荷重の変化に応じて、ワイヤー制御サスペンションシステムが自動的に車体の高さを変更してサスペンションシステムへの負荷を軽減することを意味します。車の外観を改善します。 車両の静荷重と動荷重を考慮した走行状態制御を行い、高速走行時にはワイヤー制御サスペンションにより積極的に車高を下げ、走行性能を向上させます。走行安定性や空力特性など、凹凸のある路面を走行する際には、ボディと地面やサスペンションとの衝突を避けるために積極的にボディを持ち上げると同時に、サスペンションの剛性を状況に応じて変化させます。運転の快適さの要件。 自動水平制御により、平坦路や一般道路での走行条件において、動荷重や静荷重の影響を受けずに車体高さがほぼ一定の姿勢を維持し、快適な運転と快適な走行を実現します。ヘッドライトのビームの方向が変わらないため、運転の安全性が向上します。アメリカのBOSE社が発売した発電式ショックアブソーバーPGSA(Power-Generating Shock Absorber)は、リニアモーター電磁システムLMES(Linear Motion Electromagnetic System)で完全に構成されており、各ホイールにはこのシステムとコンポーネントが個別に搭載されています。 . ボディ独立サスペンションシステム。図 26 に示すように。 図 26 米国 BOSE 社の発電用ショックアブソーバー PGSA 動作原理は、各ホイールの調整制御信号をBOSEパワーアンプで増幅し、駆動モーターの動作電流を変化させ、電磁リニアモーターを駆動してサスペンションの伸縮状態を変化させます。このシステムは、モーターに電流を供給するだけでなく、車両の走行中にモーターから電流を生成して電気自動車のバッテリーを充電することもでき、一連のエネルギー回生メカニズムを形成し、新エネルギー車の使用に非常に有益です。純粋な電力でバッテリー電力を増加させ、電気自動車の走行距離を延長します。 ワイヤー制御サスペンションシステムの特長 ワイヤー制御サスペンションシステムは、車両を状況に応じて制御することができます。アクチュエータは異なるスプリング剛性とショックアブソーバーの減衰を生成し、乗り心地と操縦安定性の要件を満たすだけでなく、ドライバーの快適性の要件も確保します。その主な利点は次のとおりです: 1) 剛性は調整可能で、車の旋回ロール、前進ブレーキ、加速ヘッドアップを改善できます。 #2) 車の荷重が変化すると、車体の高さを維持するためにブレーキをかけることができます; 3) でこぼこした道路を走行する場合、シャシーの高さを自動的に変更して車の通過性を向上させます。 4) ブレーキ時のうなずきや加速時のリフト現象を抑制し、車輪と地面の密着状態を最大限に利用し、ブレーキの効きを加速します。プロセスと制動距離の短縮; 5) 車輪を地面と良好に接触させ、車輪と地面との密着性を高め、車の横滑りに対する抵抗力を高めます。 ワイヤー制御サスペンション システムには多くの利点がありますが、その複雑な構造により、ワイヤー制御サスペンション システムには避けられない欠点もあります。 #1) 構造が複雑で、故障の確率と頻度が従来のサスペンション システムよりもはるかに高くなります。ワイヤー制御サスペンションは各車輪サスペンションに制御ユニットが必要なため、路面データ取得後の最適化処理アルゴリズムが非常に難しく、過調整や故障が発生しやすいです。 2) 空気は車高を調整するための「推進力」として機能し、ショックアブソーバーの密閉要件は非常に高く、エアショックアブソーバーから漏れが発生すると、システム全体が「麻痺」状態になり、頻繁に空気漏れが発生します。シャーシの高さを調整すると、エア ポンプ システムが部分的に過熱し、エア ポンプの耐用年数が大幅に短くなる可能性があります。 #学習の概要 1. アクティブ サスペンションとも呼ばれるサスペンション バイ ワイヤーは、インテリジェント コネクテッド ビークルの重要な部分であり、振動を緩衝し、スムーズな運転を維持し、車両のハンドリング パフォーマンスと運転体験に直接影響します。 2. ワイヤー制御サスペンションシステムは、主にモード選択スイッチ、センサー、ECU、アクチュエーターで構成されています。 3. ワイヤー制御サスペンションシステム ECU の制御により、ショックアブソーバーの減衰、スプリングの剛性、車高制御などの主要な機能を実現できます。
ブレーキバイワイヤシステムの紹介
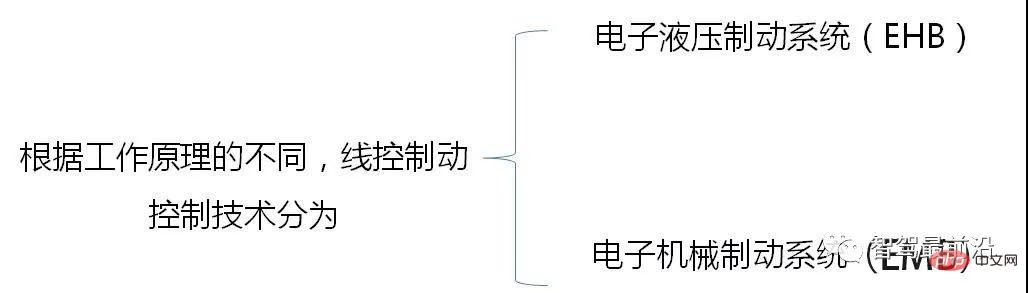 #図 12 ブレーキバイワイヤ制御技術分類
#図 12 ブレーキバイワイヤ制御技術分類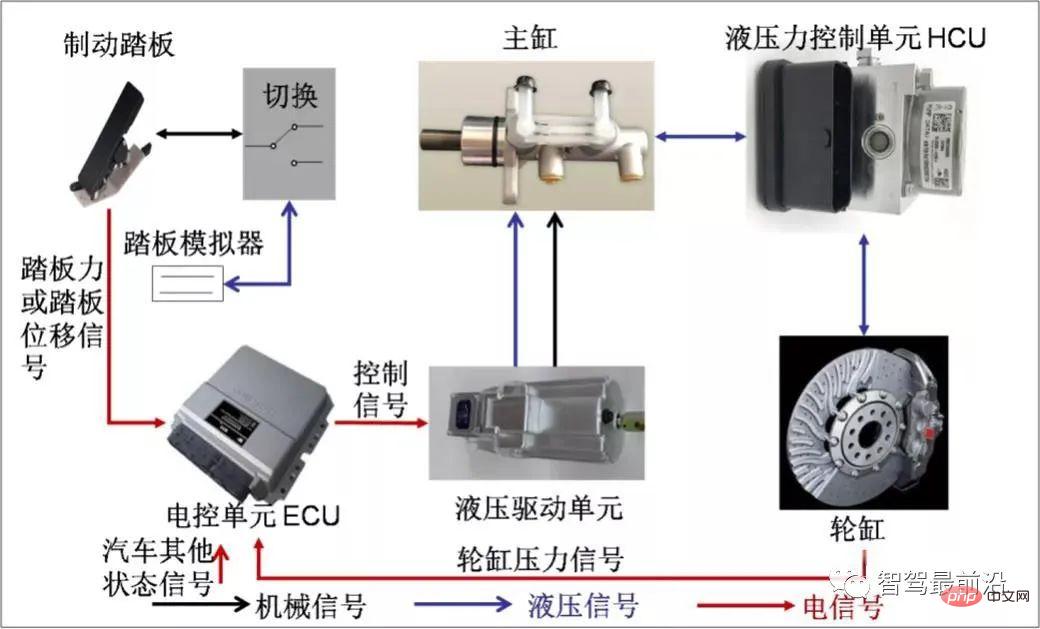

#05 シフトバイワイヤシステムの知識

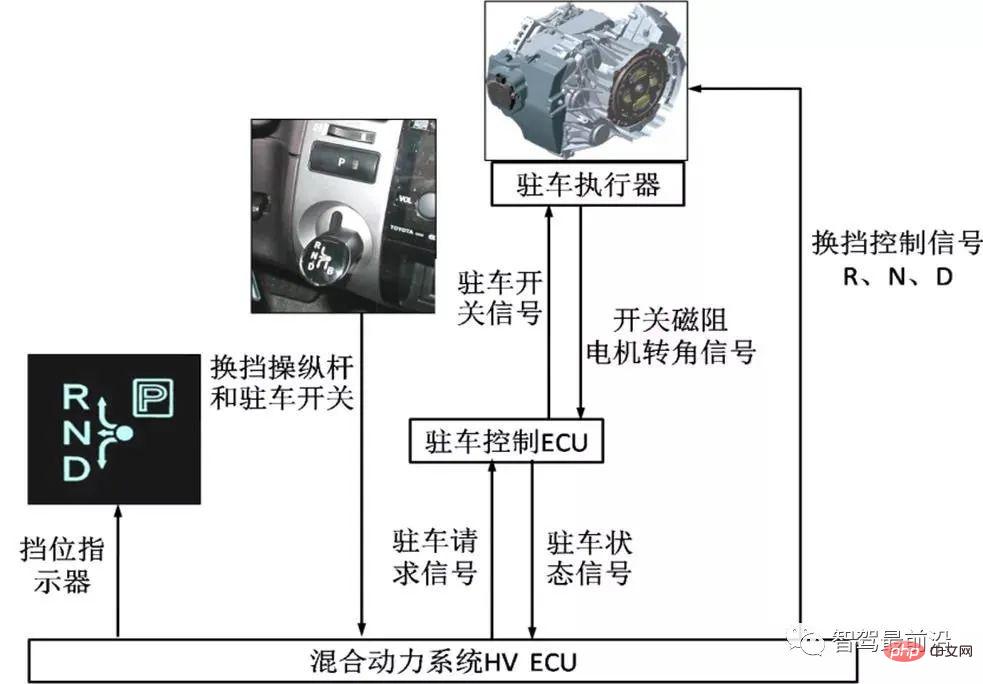
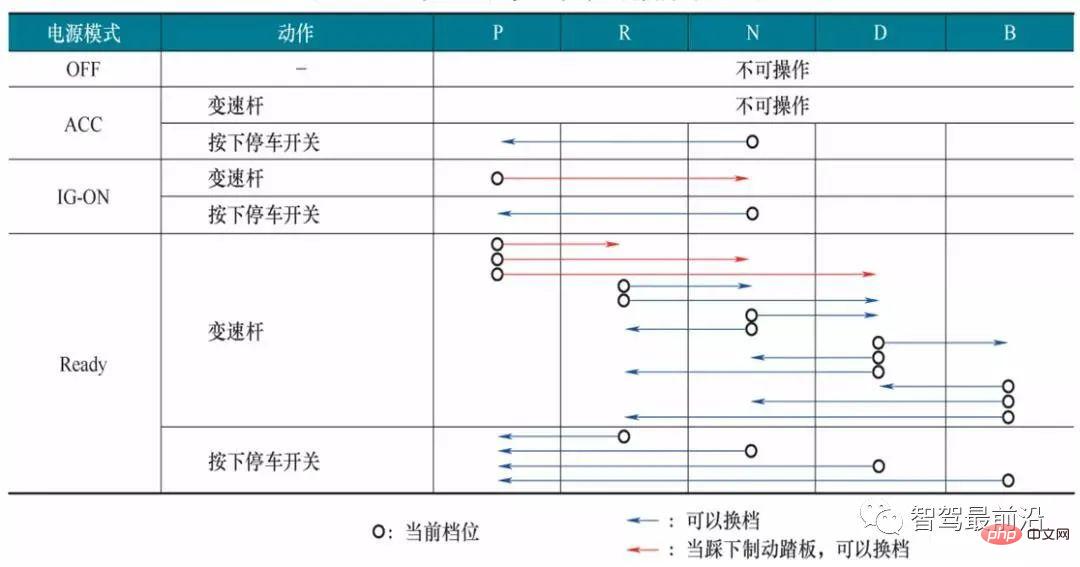


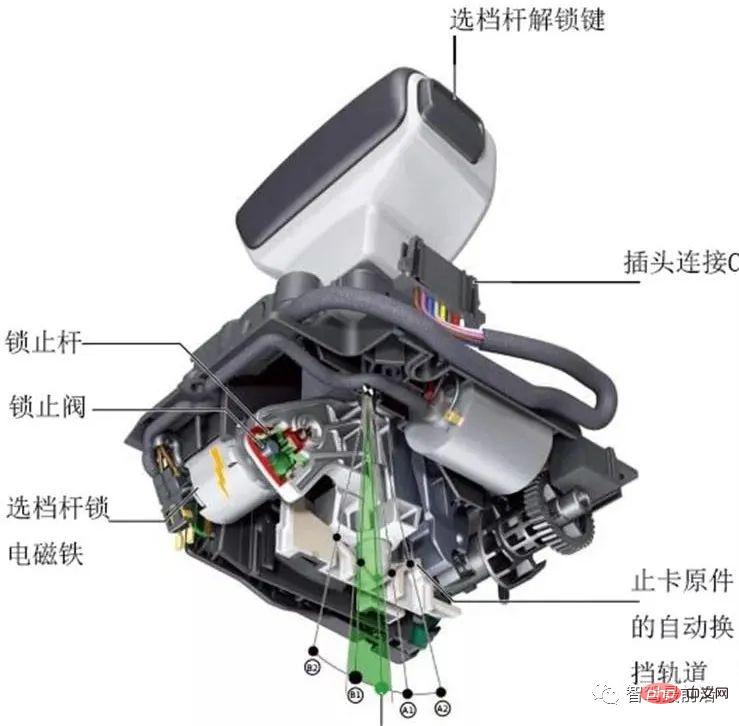 図 21 ロック機構の図
図 21 ロック機構の図

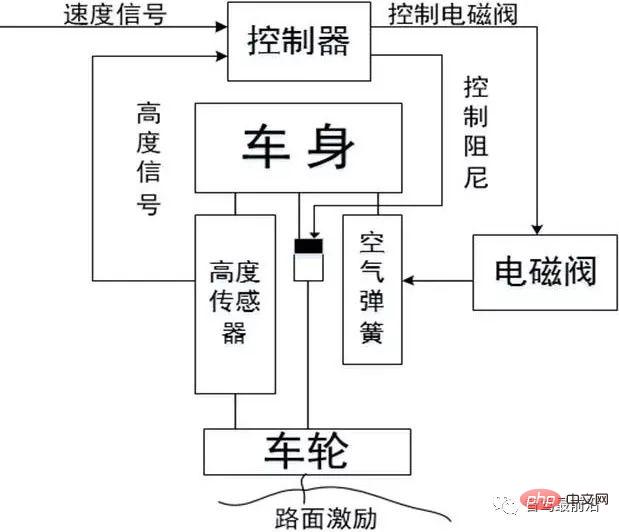 図 23 典型的なワイヤー制御サスペンション システムの動作原理の概略図
図 23 典型的なワイヤー制御サスペンション システムの動作原理の概略図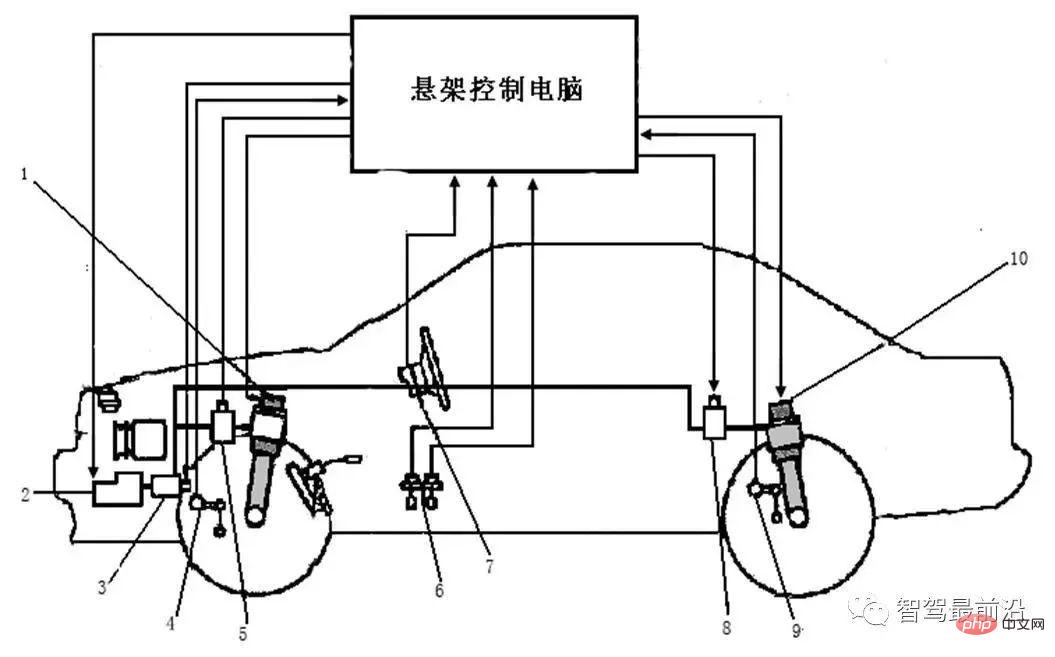
以上がインテリジェントコネクテッドカー向けのワイヤー制御シャーシテクノロジーの詳細な分析の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7509
7509
 15
1378
52
78
11
19
61
15
1378
52
78
11
19
61

 飛び回ったり、口を開けたり、見つめたり、眉毛を上げたりする顔の特徴をAIが完璧に模倣し、ビデオ詐欺を防ぐことは不可能
Dec 14, 2023 pm 11:30 PM
飛び回ったり、口を開けたり、見つめたり、眉毛を上げたりする顔の特徴をAIが完璧に模倣し、ビデオ詐欺を防ぐことは不可能
Dec 14, 2023 pm 11:30 PM
これほど強力なAIの模倣能力では、それを防ぐことは本当に不可能です。 AIの発展は今ここまで進んでいるのか?前足で顔の特徴を浮き上がらせ、後ろ足で全く同じ表情を再現し、見つめたり、眉を上げたり、口をとがらせたり、どんなに大袈裟な表情でも完璧に真似しています。難易度を上げて、眉毛を高く上げ、目を大きく開き、口の形も歪んでいるなど、バーチャルキャラクターアバターで表情を完璧に再現できます。左側のパラメータを調整すると、右側の仮想アバターもそれに合わせて動きが変化し、口や目の部分がアップになります。同じです(右端)。この研究は、GaussianAvatars を提案するミュンヘン工科大学などの機関によるものです。
 MotionLM: マルチエージェント動作予測のための言語モデリング技術
Oct 13, 2023 pm 12:09 PM
MotionLM: マルチエージェント動作予測のための言語モデリング技術
Oct 13, 2023 pm 12:09 PM
この記事は自動運転ハート公式アカウントより許可を得て転載しておりますので、転載については出典元までご連絡ください。原題: MotionLM: Multi-Agent Motion Forecasting as Language Modeling 論文リンク: https://arxiv.org/pdf/2309.16534.pdf 著者の所属: Waymo 会議: ICCV2023 論文のアイデア: 自動運転車の安全計画のために、将来の動作を確実に予測するロードエージェントの数は非常に重要です。この研究では、連続的な軌跡を離散的なモーション トークンのシーケンスとして表現し、マルチエージェントのモーション予測を言語モデリング タスクとして扱います。私たちが提案するモデル MotionLM には次の利点があります。
 数年後にはプログラマーが減少するということをご存知ですか?
Nov 08, 2023 am 11:17 AM
数年後にはプログラマーが減少するということをご存知ですか?
Nov 08, 2023 am 11:17 AM
「ComputerWorld」誌はかつて、IBM がエンジニアが必要な数式を書いて提出できる新しい言語 FORTRAN を開発したため、「プログラミングは 1960 年までに消滅するだろう」という記事を書きました。コンピューターを実行すればプログラミングは終了します。画像 数年後、私たちは新しいことわざを聞きました: ビジネスマンは誰でもビジネス用語を使って問題を説明し、コンピュータに何をすべきかを伝えることができます。COBOL と呼ばれるこのプログラミング言語を使用することで、企業はもはやプログラマーを必要としません。その後、IBM は従業員がフォームに記入してレポートを作成できるようにする RPG と呼ばれる新しいプログラミング言語を開発したと言われており、会社のプログラミング ニーズのほとんどはこれで完了できます。
 フーリエ知能万能ヒューマノイドロボット「GR-1」の予約販売が始まります!
Sep 27, 2023 pm 08:41 PM
フーリエ知能万能ヒューマノイドロボット「GR-1」の予約販売が始まります!
Sep 27, 2023 pm 08:41 PM
この人型ロボットは身長 1.65 メートル、体重 55 キログラム、体に 44 の自由度があり、素早く歩き、障害物を素早く回避し、斜面を着実に上り下りし、衝撃干渉に耐えることができます。フーリエインテリジェンスの汎用人型ロボット GR-1 の予約販売が開始されました ロボット講堂 フーリエインテリジェンスの汎用人型ロボット フーリエ GR-1 の予約販売が開始されました。 GR-1 は、高度にバイオニックな体幹構成と擬人化された動作制御を備えており、全身 44 度の自由度を持ち、歩行、障害物を回避、障害物を横切り、坂道を上り下りし、干渉に耐え、さまざまな道路に適応する能力を備えています。一般的な人工知能システムであり、理想的なキャリアです。公式ウェブサイトの先行販売ページ: www.fftai.cn/order#FourierGR-1# フーリエ知能を書き直す必要があります。
 ファーウェイは、心拍数に基づいてユーザーの感情状態を評価できるスマートウェアラブル分野でXuanjiセンシングシステムを発売する
Aug 29, 2024 pm 03:30 PM
ファーウェイは、心拍数に基づいてユーザーの感情状態を評価できるスマートウェアラブル分野でXuanjiセンシングシステムを発売する
Aug 29, 2024 pm 03:30 PM
最近、ファーウェイは、Xuanjiセンシングシステムを搭載した新しいスマートウェアラブル製品を9月に発売すると発表しました。これはファーウェイの最新スマートウォッチとなる予定です。この新製品は、高度な感情的健康モニタリング機能を統合し、正確性、包括性、スピード、柔軟性、オープン性、拡張性という 6 つの特徴を備えた包括的な健康評価をユーザーに提供します。このシステムはスーパーセンシングモジュールを使用し、マルチチャンネル光路アーキテクチャ技術を最適化することで、心拍数、血中酸素、呼吸数などの基本的な指標の監視精度を大幅に向上させます。さらに、Xuanji センシング システムは、心拍数データに基づく感情状態の研究も拡張しており、生理学的指標に限定されず、ユーザーの感情状態やストレス レベルを評価することもでき、60 以上のスポーツのモニタリングをサポートしています。健康指標、心臓血管、呼吸器、神経、内分泌、
 歩行者軌跡予測に有効な手法と一般的なBase手法は何ですか?トップカンファレンスの論文を共有!
Oct 17, 2023 am 11:13 AM
歩行者軌跡予測に有効な手法と一般的なBase手法は何ですか?トップカンファレンスの論文を共有!
Oct 17, 2023 am 11:13 AM
軌道予測はここ 2 年間で注目を集めていますが、そのほとんどは車両の軌道予測の方向に焦点を当てています。本日、自動運転ハートは、歩行者軌道予測のアルゴリズムを NeurIPS - SHENet で共有します。制限されたシーンでは、人間の行動パターンは通常、ある程度、限られたルールに従っています。この仮定に基づいて、SHENet は暗黙のシーン ルールを学習することで人の将来の軌道を予測します。この記事は自動運転ハート様よりオリジナル記事として認定されました!著者の個人的な理解では、人間の動きにはランダム性と主観性があるため、現時点では人の将来の軌道を予測することは依然として困難な問題です。ただし、制約のあるシーンでの人間の動きのパターンは、シーンの制約 (フロア プラン、道路、障害物など) や人間対人間、または人間対オブジェクトの対話性によって異なることがよくあります。
 スマートウォッチの電源が入らない: 今何をすべきか
Aug 23, 2023 pm 05:41 PM
スマートウォッチの電源が入らない: 今何をすべきか
Aug 23, 2023 pm 05:41 PM
スマートウォッチの電源が入らない場合はどうすればよいですか?お気に入りのスマートウォッチの寿命を回復するために利用できるオプションは次のとおりです。パワープレイをチェック: スマートウォッチがヘッドライナーとしてスターがちりばめられたステージを想像してみてください。しかし、バッテリーを忘れてしまったために幕が上がらないのです。詳細を掘り下げる前に、スマートウォッチが煙や鏡の上だけで動作していないことを確認してください。適切な充電時間を与えてください。そして、もう少し余裕を感じたら、スタイリッシュな新しいケーブル、つまり流行に敏感なケーブルを贈ってください。素晴らしいリブート: 迷ったときは、少しR&Rしてみましょう。それがリブートとリバイバルです。交響曲を指揮する巨匠のようにこれらのボタンを押し続けます。さまざまなスマートウォッチには独自の再起動儀式があります。Google がガイドです。これは 1 つです
 UniOcc: 視覚中心の占有予測を幾何学的およびセマンティック レンダリングと統合します。
Sep 16, 2023 pm 08:29 PM
UniOcc: 視覚中心の占有予測を幾何学的およびセマンティック レンダリングと統合します。
Sep 16, 2023 pm 08:29 PM
原題: UniOcc: UnifyingVision-Centric3DOccupancyPredictionwithGeometricandSemanticRendering 論文を表示するには、次のリンクをクリックしてください: https://arxiv.org/pdf/2306.09117.pdf 論文のアイデア: この技術レポートでは、Forvision-を使用した UniOCC と呼ばれるソリューションを提案します。 CVPR2023nuScenesOpenDatasetChallenge における中心的な 3D 占有予測軌跡。既存の占有予測方法は、主に 3 次元の占有ラベルの使用に焦点を当てています。
