

ADAS システムのセンサーをどのように配置すべきかについて説明した記事

この記事では、まず、先進運転支援システムにおけるセンサー配置戦略の重要性を紹介し、前方監視スマート カメラ、前向きミリ波レーダー、横向きミリ波レーダーなど、先進運転支援システムのセンサー タイプを提案します (77 GHz/22 GHz )、超音波レーダー、サラウンドビュー カメラの各センサーの性能特性について簡単に説明します。次に、現在の量産サプライヤーのソリューションを例として、検出距離、検出範囲、外部レイアウト環境の要件など、さまざまなセンサー性能パラメーターを詳細に紹介します。本稿では、車両単体で異なるセンサーを使用することで実現できる機能と、異なる運転支援レベルや異なる機能の組み合わせによる異なるセンサーの融合戦略を紹介します。最後に、さまざまなセンサーを車両に合理的に取り付ける方法を紹介し、要求される性能要件と検出範囲の冗長性に基づいて、具体的な実装計画を提案し、そのレイアウト要件を分析して詳細に説明します。
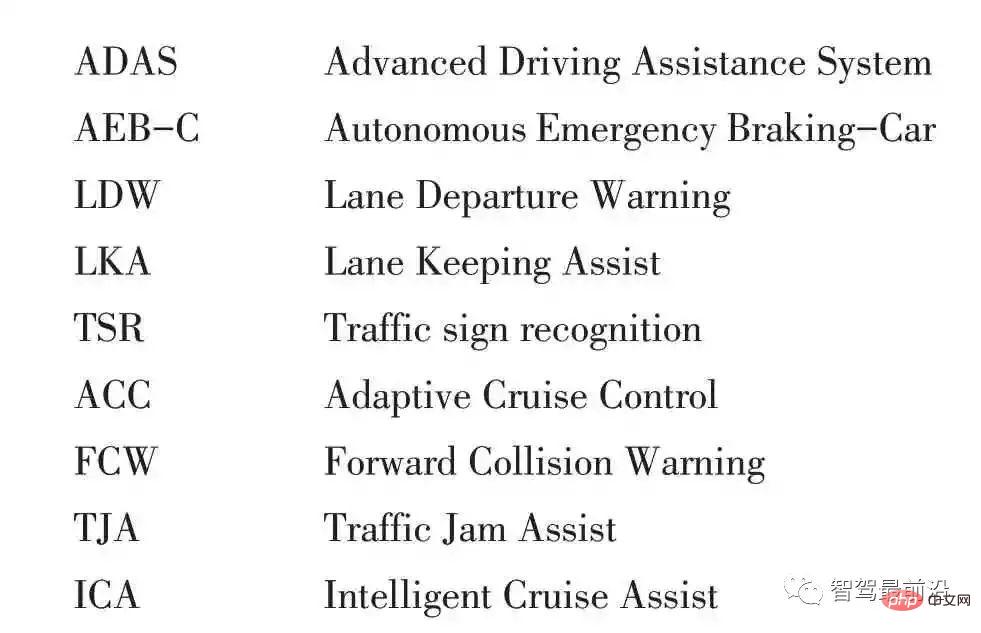
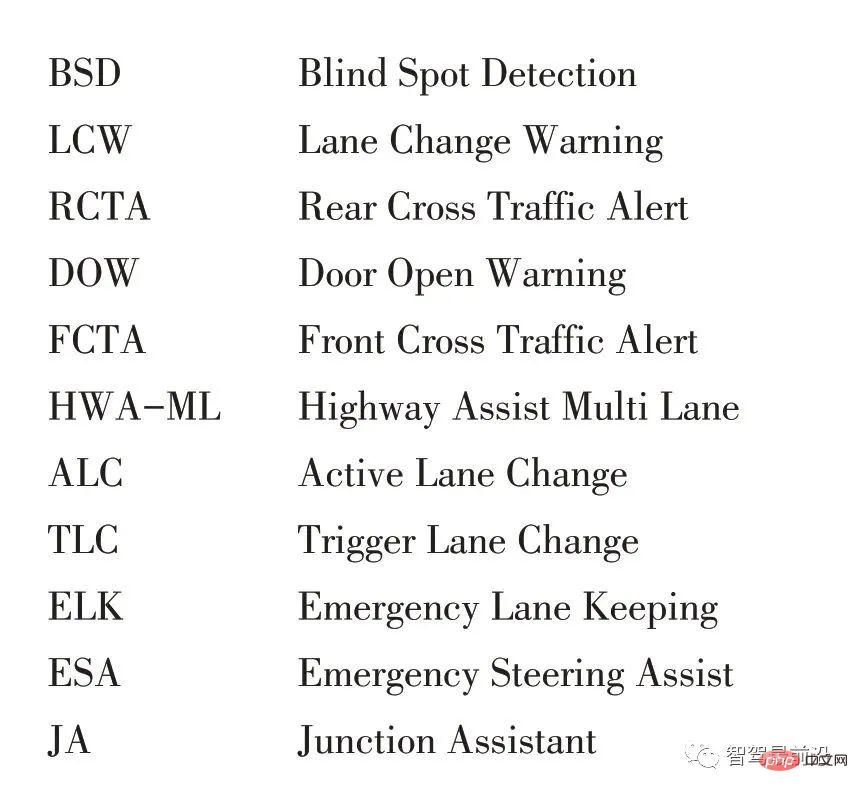
略語
科学技術の進歩と自動運転技術の急速な発展により、現在、先進運転支援システムや運転支援システムを搭載する自動車が増えており、自動運転車はSAE J3016TM自動運転レベルではレベル5の自動運転に分類されています。自動運転にはさまざまなセンサー(超音波レーダー、ミリ波レーダー、スマートカメラ、高解像度/標準解像度カメラ、ライダーなど)が使用されますが、Wang Tianらはカメラ、ライダーなどの主要なセンサーについて研究を実施しました。 、自動運転知覚システムにおけるミリ波レーダーの機能紹介。 Yuan Xiuzhen 氏は、自動運転車センサー技術業界を分析し、ライダー、カメラ、超音波センシングなどの重要なハードウェア アプリケーションについて詳しく説明しました。自動運転の開発バリューチェーンでは、センサー部品の開発は主に国内外の自動車部品サプライヤーに集中し、車両機能の統合はOEMによって完了します。
Zhang Yanyong らは、マルチモーダル フュージョンに基づく自動運転知覚フュージョン アルゴリズムを提案しました。多くのエンジニアは、アルゴリズム開発とシステム設計に開発努力を集中する傾向がありますが、よく起こることつまり、適切に適用されたセンサーのハードウェアおよびソフトウェア戦略は、一部の OEM モデルでは非常にうまく機能しますが、他の OEM には平均的、またはマイナスの影響さえあります。自動運転の研究開発ではあらゆるつながりを考慮することが不可欠だからだ。閉ループ開発として、優れたアルゴリズムは、センサー フロントエンド センシングの正確な検出に基づいています。さまざまなタイプのハードウェア センサーには、センサー検出パフォーマンスに対するさまざまな要件があります。検出パフォーマンスに影響を与える特に重要な点は、センサーの配置と配置です。 。 方法。本稿では、自動運転に用いられるセンサーの検出性能特性を踏まえた配置方法について簡単に紹介します。
先進運転支援システム センサーの紹介先進運転支援システム (ADAS) は、センサーを使用して車の運転中に周囲の環境をリアルタイムで検知し、データを収集します。 、センシングフュージョンを行い、センシングされたデータに基づいて意思決定分析を実行し、最終的に車両を制御してドライバーに早期警告を提供します。
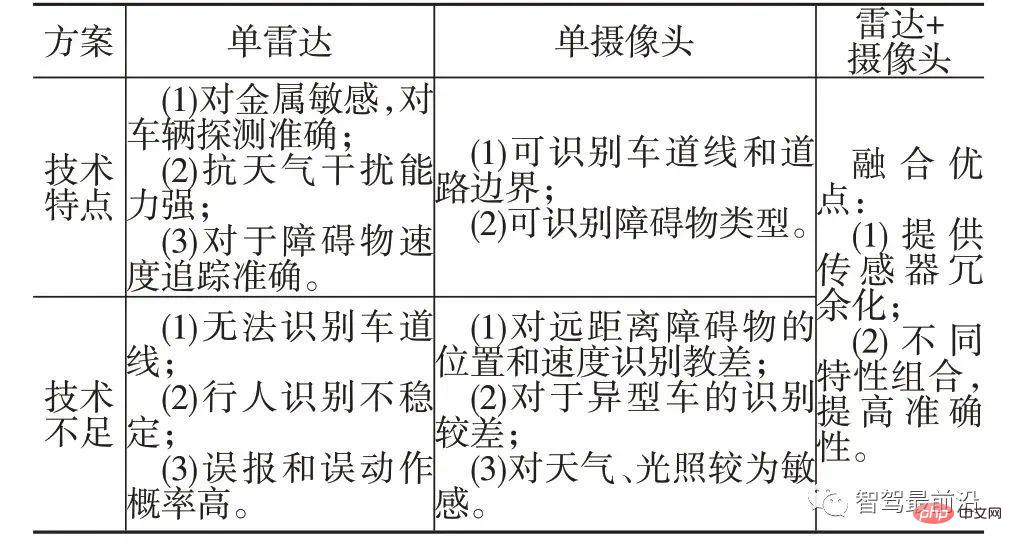
カメラは、物体の色、形状、材質などを含む豊富な環境情報を取得でき、2D コンピュータ ビジョンは大幅に進歩しました。この分野では、信号に関する高度なアルゴリズムが数多くあります。光検出、物体検出など 分類などミリ波レーダーは正確な距離情報が得られ、透過力が強く、天候や環境変化の影響を受けにくく、長距離のセンシング・検出が可能です。
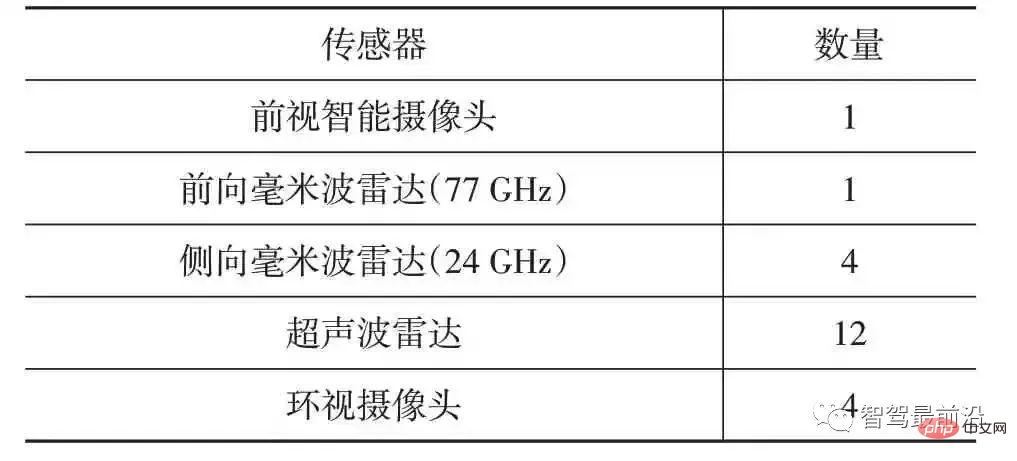
現在、量産自動運転車には 4 種類のセンサーが搭載されており、合計 22 個のセンサーが搭載されています (表 1)。
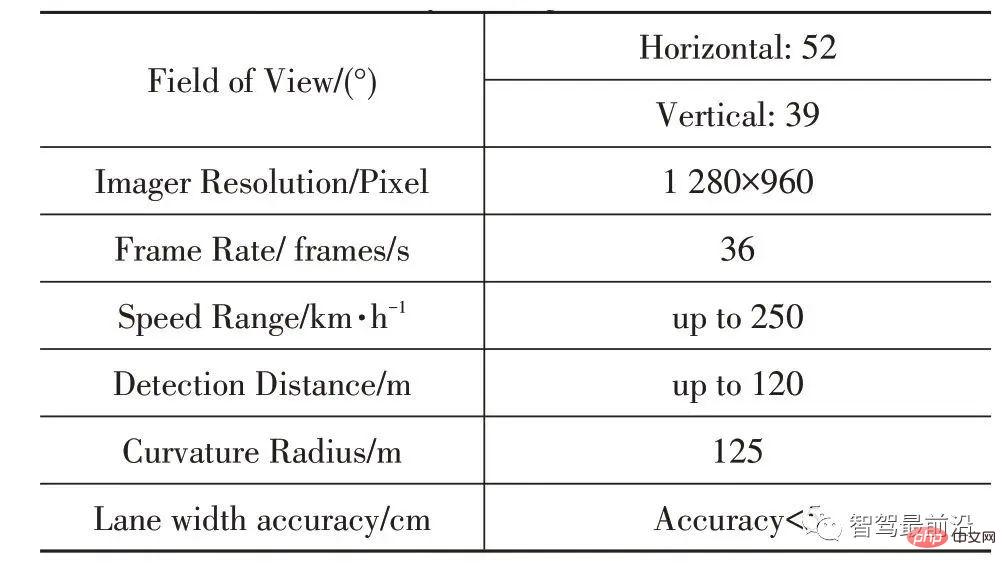
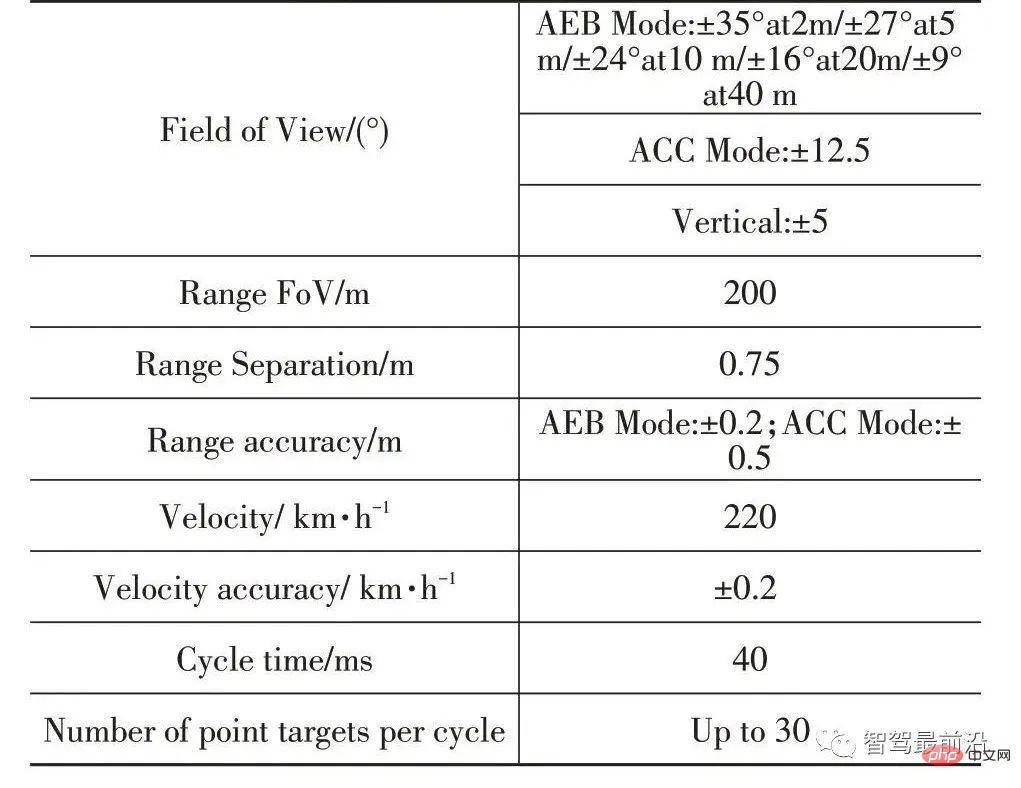
フロントビュー スマート カメラ: 一般的にはシングル、ダブル、トリプル カメラが使用されます。主に中距離および長距離のシーンで使用されます。明確な車線の境界線、交通標識、道路標識などを識別できます。照明、天候、その他の条件は非常に敏感であり、複雑なアルゴリズムのサポートと比較的高いプロセッサ要件を必要とします。
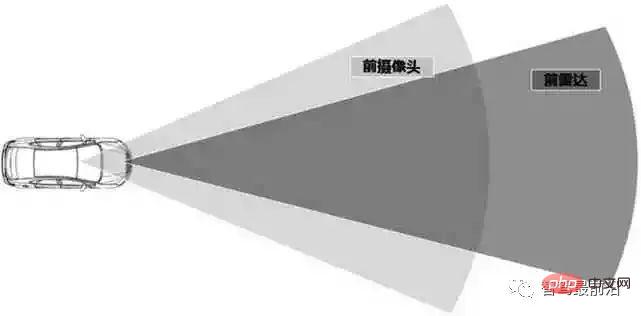
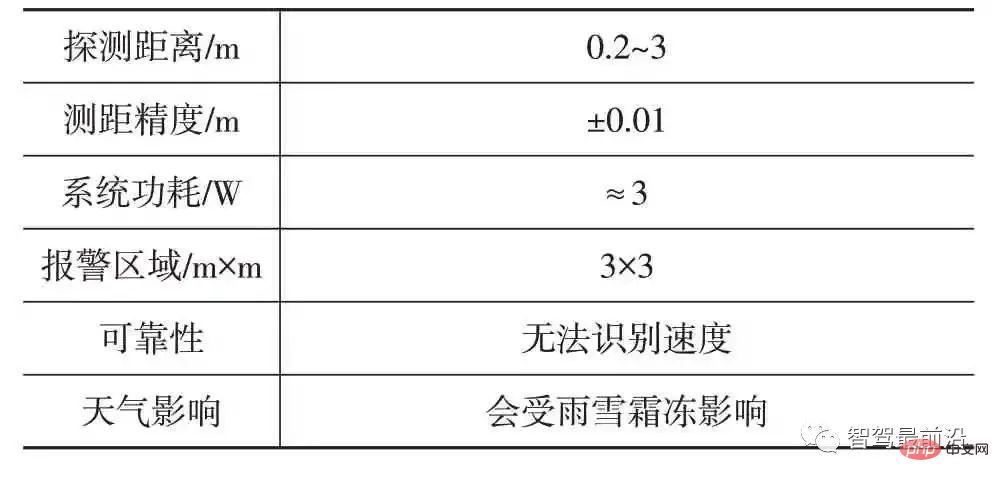
#表 1 先進運転支援システムのセンサー分類 ミリ波レーダー:中近距離測定用の24GHzレーダーと長距離測定用の77GHzレーダーの主に2種類があります。ミリ波レーダーは、被写界深度と速度情報を効果的に抽出し、障害物を識別し、霧、煙、粉塵を透過する一定の能力を備えていますが、複雑な環境障害物の場合、ミリ波は測位に音波に依存するため、音響が発生します。電波が乱反射して見えるため、見逃し率や誤り率が比較的高くなります。 超音波レーダー: 主に近距離シナリオで使用され、超音波を送信して反射された超音波信号を受信し、検出結果をコントローラーに送信します。超音波はエネルギー消費が遅く、透過力が強く、距離測定方法が簡単で、コストが安い。しかし、超高速での距離測定には限界があり、車が高速で走行している場合、超音波測距では車間距離のリアルタイムの変化に追いつけず、誤差が大きくなります。超音波は散乱角が大きく指向性が悪いため、遠方の対象物を測定する場合、エコー信号が比較的弱く、測定精度に影響を与えます。ただし、短距離測定では、超音波測距センサーには大きな利点があります。 サラウンド ビュー カメラ: 主に近距離シーンで使用され、障害物を識別できますが、光や天候などの外部条件に非常に敏感です。技術は成熟しており、価格も優れています。低い。技術の継続的な開発と進歩により、カメラの画素数は当初の 30 万画素から現在の 100 万画素まで徐々に増加しており、今後 3 年以内には 200 万画素のカメラが普及するでしょう。 先進運転支援システムの各種センサーを組み合わせることで、異なる機能を実現できます。 ADASL1/L2/L3を実現できる車両の詳細なサブ機能を以下に紹介します。 前方スマートカメラは、AEB-C (自動緊急ブレーキ車)、LDW (車線逸脱警報)、LKA(車線維持支援)、TSR(交通標識認識)により、L1レベルの運転支援を実現します。実際の道路状況の検出 (車線境界線、トンネル、ランプ、制限速度など) は正確ですが、距離の検出は正確ではありません。代表的な性能パラメータを表 2 に示します。 #表 2 Mobileye EYEQ3 の部分的な性能パラメータ 前方ミリ波レーダー(77GHz)は、ACC(アダプティブクルーズ)、AEB-C(自動緊急ブレーキ車)、FCW(前方衝突警報)を実装し、L1レベルの運転支援を実現します。距離の検出は正確ですが、実際の状況 (車線境界線、トンネル、ランプ、制限速度など) を予測することはできません。代表的な性能パラメータを表 3 に示します。 #表 3 AC1000 のいくつかの性能パラメータ
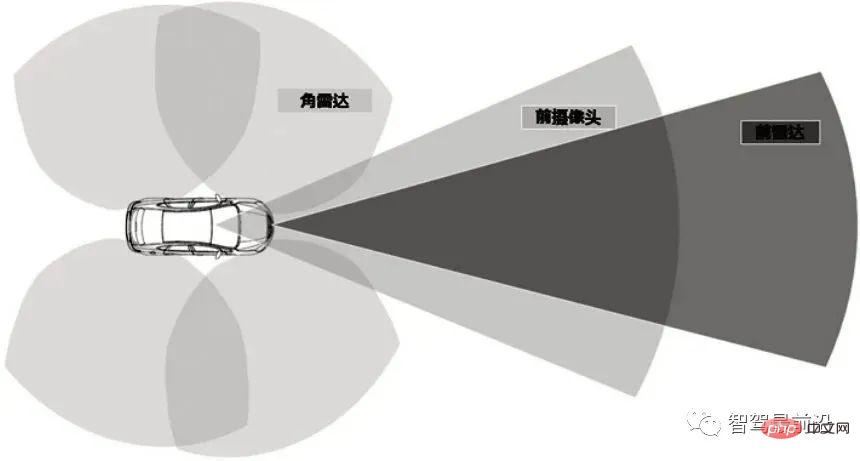
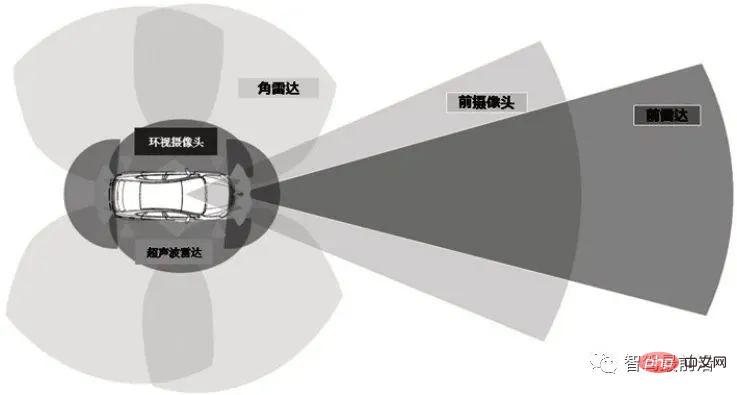
側面ミリ波レーダー(24GHz)はブラインドゾーン監視機能を実装しており、実装方法は 2 つあります。後部にはBSD(死角監視)、LCW(車線変更衝突警報)、RCTA(後方横断警報)、DOW(ドア開放警報)機能を実現する2基のミリ波レーダーを搭載。ミリ波レーダーは、上記の機能を実現するほか、FCTA(前方横断交通警報)の実現や、L2レベル以上の先進運転支援機能にも対応します。科学技術の進歩に伴い、横方向ミリ波レーダーの性能も徐々に向上しています(表5参照)。 #表 5 側方ミリ波レーダーの一部パラメータと開発 側方ミリ波レーダー(4個)、前向きミリ波レーダー(1個)、前向きスマートカメラ(1個)の組み合わせにより、L2(またはL3)レベルの自動運転を実現します。 L2レベルの自動運転では、TJA/HWAML(高速道路運転支援 - マルチ車線)、ALC(アクティブ車線変更支援)、TLC(トリガード車線変更支援)、ELK(緊急車線維持)、ESA(緊急ステアリング支援)が対応する。 )、JA (交差点アシスト)、全方位警告 (BSD/DOW/RCTA/FCTA/LCW を含む) (図 2) を追加しました。高速道路状況下での自動運転機能を実現できます。 図 2 前方カメラ、前方ミリ波レーダー、および角度レーダーの融合 #超音波レーダー
サラウンド ビュー カメラ センサー車両レイアウトの融合 #表 7 サラウンド ビュー カメラのいくつかのパラメータ 図 4 サラウンド ビュー カメラのレイアウト ##図 5 センサー レイアウトの融合図
図 6 前方ミリ波レーダーのレイアウト 横方向ミリ波レーダー(アングルレーダー)のレイアウトと融合
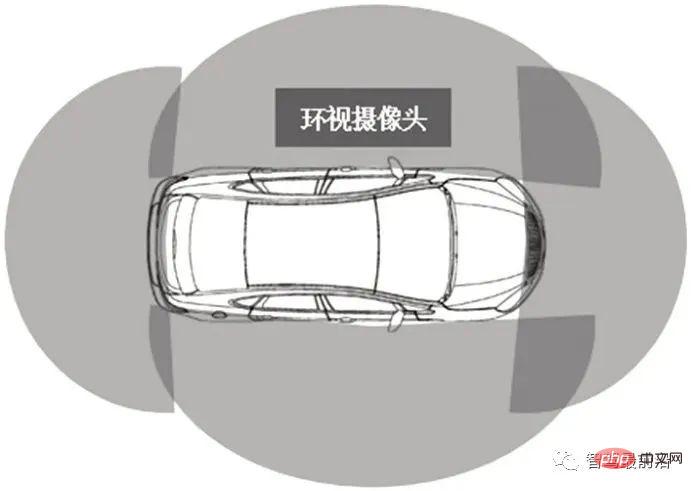
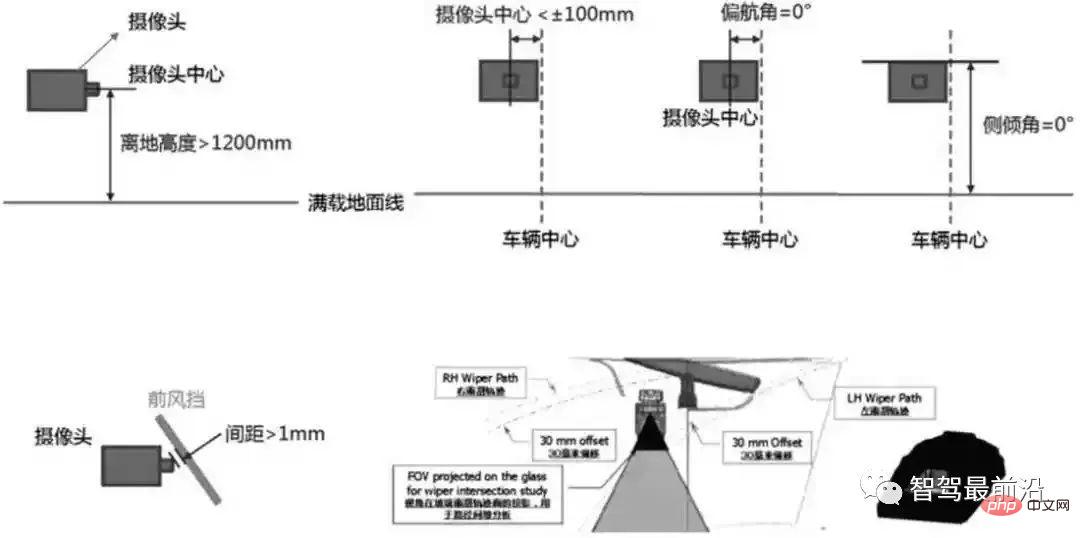
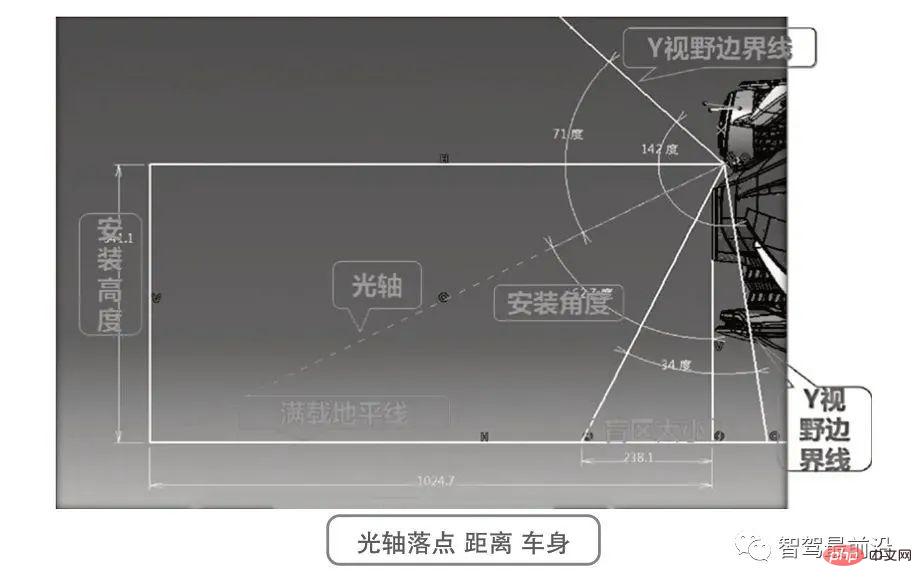
超音波レーダー レイアウトの融合 #図 8 超音波レーダー レイアウトの位置要件 AVM サラウンドビューシステムでは、車体の前後左右に計 4 台のカメラを配置する必要があります。フロントカメラはフロントグリル付近に設置されています。バックカメラは、バックドアナンバープレートライト上またはその近くに取り付けられています。左右のカメラはバックミラーハウジングの底部に取り付ける必要があり、左右のカメラの取り付けを容易にするために左右のバックミラーにカメラ穴を確保する必要があります。隣接するカメラの画像に十分な重なりがあることを確認するために、カメラを配置するときに光学キャリブレーションを実行する必要があります。また、画像の接合により、カメラの 1° の組み立て誤差範囲内に黒いエッジがないことを確認できる必要があります。死角エリアは企業標準の要件を超えてはなりません。撮影された画像の変化によってパノラマ画像が接合されるのを防ぐために、カメラは回転防止位置決め構造を備えている必要があります。 フロントカメラとリアカメラのレイアウト要件: 車両が満載のとき、地面からの高さは ≥ 600 mm、中心面からの距離は ≤ 50 mm であることが推奨されます。中心面に配置する; 視軸は車両の XZ 面と平行になる; 視軸と車両の Z 軸の間の角度は 45° ~ 75° にすることをお勧めします。光軸と接地線は車体の最外側から 1,000 ~ 2,000 mm、死角視野は ≤ 200 mm、カメラの垂直視野は 3,000 mm で完全に見える高さ 3,000 mm の物体が地面に直立しています。図 9 に、サラウンドビュー カメラ (正面) のレイアウト要件を示します。 #図 9 サラウンド カメラ (正面) のレイアウト要件 先進運転支援システムのセンサーは、検知範囲の冗長性を確保するだけでなく、実際の設置時に各センサーや車両の設置条件を満たす必要があります。この記事で紹介するセンサー レイアウト パラメーターは、特定の車種と特定のサプライヤーのセンサー製品に基づいて要約され、融合されています。センサーサプライヤーが異なればレイアウト要件も若干異なるため、実際の車両モデルのレイアウトプロセスでは、サプライヤーから提供されたレイアウト要件、車両のレイアウトや形状に基づいて適応的な調整を行う必要があります。 センサー実装機能構成の組み合わせ
前方スマートカメラと前方ミリ波レーダー
側面ミリ波レーダー(アングルレーダー)

超音波レーダーの近距離目標検出特性(表6)に従って、超音波レーダーはPDC(後退レーダー)、APA(自動駐車支援)、BSD(ブラインドスポット)を実現できます。検出)機能。 PDC機能を実現するためにリアバンパーに4つの超音波レーダーを設置し、後退時に前方の障害物を検知するためにフロントバンパーに4つの超音波レーダーを同時に設置(前後合計8つ)する車両もあります。前後バンパー側面に4個の超音波レーダーを設置し、近距離死角監視機能を実現するとともに、前後8個の超音波レーダーと合わせて計12個の超音波レーダーにより、近距離死角監視機能を実現します。アパ機能。 BSD機能を実現するために車両側面にミリ波角レーダーを設置する場合には、側面に超音波レーダーを設置する必要はありません。 BSD が超音波レーダーを導入する主な理由は、そのコスト上の利点です。超音波レーダーのさまざまな組み合わせと機能を図 3 に示します。
 #表 6 超音波レーダーのいくつかのパラメータと特性
#表 6 超音波レーダーのいくつかのパラメータと特性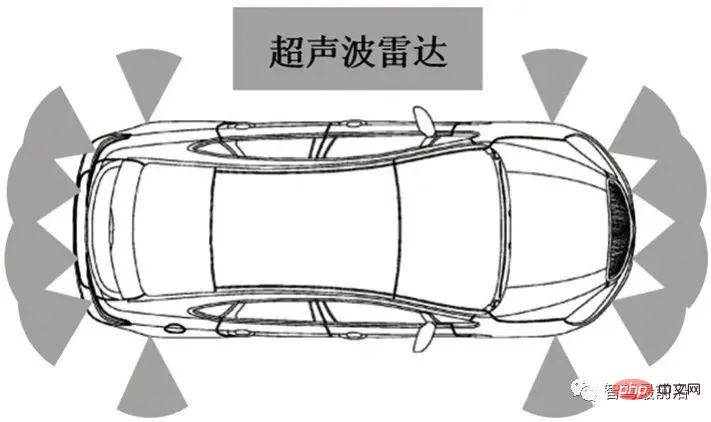 #図 3 超音波レーダー ソリューションのレイアウト
#図 3 超音波レーダー ソリューションのレイアウト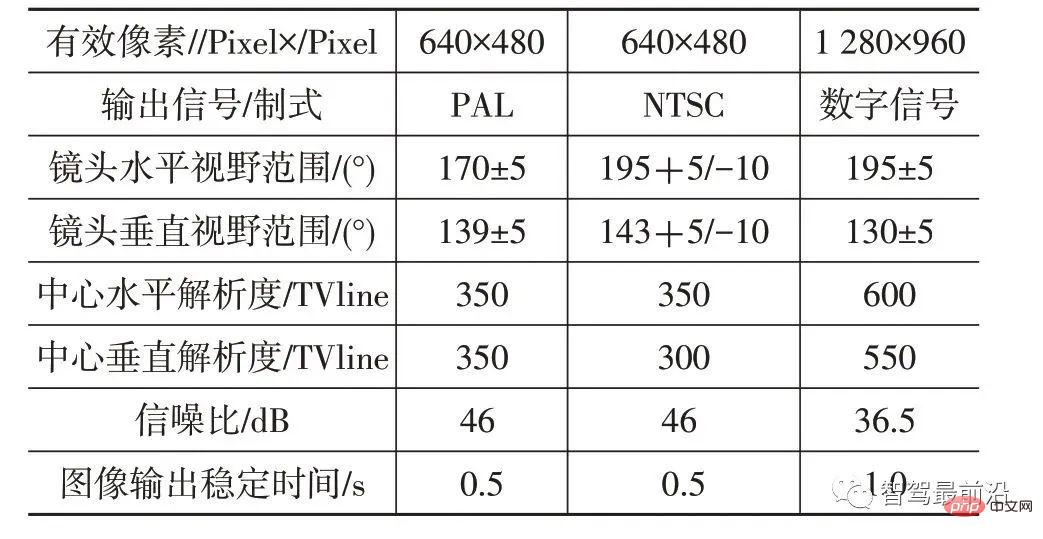
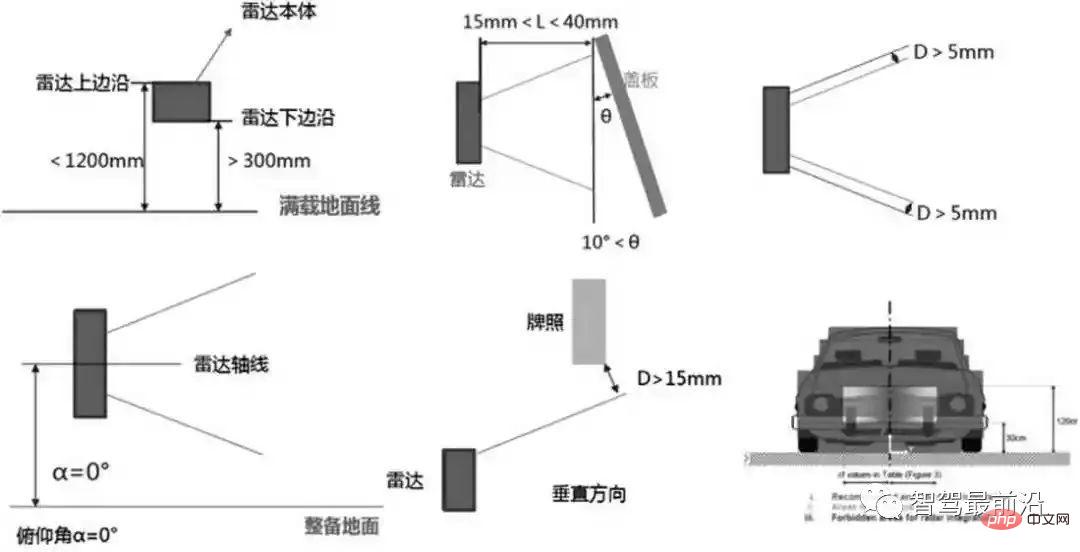
前方レーダーの設置位置は、レーダー性能パラメータの要件に応じて設定され、ボディ形状に合わせ、無理のないレイアウト位置を設定。レーダーの地上高 (レーダー アンテナの軸から地面までの距離) は 50 cm が推奨されますが、30 cm から 120 cm の間であれば許容されます。地上から 30 cm に近い高さでは、地面からの反射信号が過剰になる可能性があり、直接信号の受信を妨げ、検出のリスクを軽減します。レーダーと保護カバーの間の距離は 15 mm (波長の 2 倍、レーダービームに対する複雑な近接場の影響を回避できる) より大きく、40 mm 未満 (レーダー波の過度に大きな交差面を回避するため) )。レーダーの横位置座標は -30 cm から 30 cm の間です。レーダーがフロント カバーとともに取り付けられている場合、600 mm を超える曲率半径、ビームとカバーの交差部分の均一な厚さ、シミュレーション テストを受ける必要があるプロファイルなど、カバーに対する特別な要件もあります。 、電気的特性をテストする必要がある材料、非溶射部品など。ミリ波レーダーのビームと周囲の構造物との間の距離は >5 mm、車両との角度 (ピッチ角、ヨー角、ロール角) は 0°、レーダーの視野とナンバー プレート フレームの間の距離はナンバープレート取付後のレーダー探知に影響を与えないよう、15mm以上確保してください。図 6 に示すように。
アングルレーダーは、性能パラメータ要件と機体形状に基づいて合理的なレイアウトを設定しますレイアウト位置については、車体にレイアウト用のスペースを確保する必要があります。アングルレーダー配置の高さの要件: 低すぎると泥、水、汚れがレーダーに影響を与え、高すぎると車両に近い死角が大きくなります(その結果、視野がなくなる可能性があります)。 ±20°を超えて見える)推奨高さは400mm~1,000mmです。死角を最小限に抑えるには、レーダーと車両の長手方向軸との間の角度は 30° ~ 45° にする必要があり、レーダーと車両の水平面との間の角度は 90° に制御するのが最適です。レーダーの FOV 視野には、金属、隆起、多層構造、または材料はありません。FOV とカバー間の最大角度は 70° です。カバーは平らであり、曲率は 350 mm より大きくなければなりません。
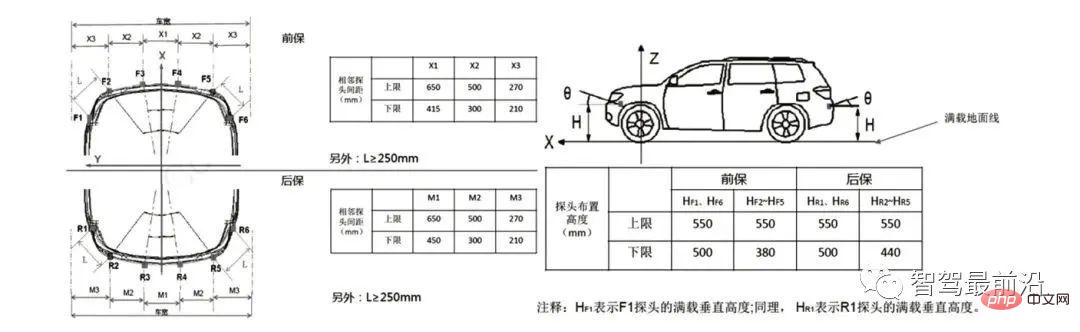
#APA 機能を実現するには、車両全体に 12 個の超音波レーダーを配置する必要があり、その配置数は比較的多くなります。超音波レーダーセンサーは取付ブラケットに取り付けられ、バンパースキンに接着固定されます。検出要件を最大限に満たすために、超音波レーダーのレイアウト位置には特定の要件が定められています (図 8 を参照)。レイアウトの具体的な要件としては、レーダーを車のバンパーの表面に置かない、レーダーの検知エリアを妨げるような写真を撮らない、熱源となる排気管や高出力ランプなどから遠ざける、などが挙げられます。
サラウンド ビュー カメラ
以上がADAS システムのセンサーをどのように配置すべきかについて説明した記事の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7696
7696
 15
1640
14
1393
52
1287
25
1229
29
15
1640
14
1393
52
1287
25
1229
29

 歩行者軌跡予測に有効な手法と一般的なBase手法は何ですか?トップカンファレンスの論文を共有!
Oct 17, 2023 am 11:13 AM
歩行者軌跡予測に有効な手法と一般的なBase手法は何ですか?トップカンファレンスの論文を共有!
Oct 17, 2023 am 11:13 AM
軌道予測はここ 2 年間で注目を集めていますが、そのほとんどは車両の軌道予測の方向に焦点を当てています。本日、自動運転ハートは、歩行者軌道予測のアルゴリズムを NeurIPS - SHENet で共有します。制限されたシーンでは、人間の行動パターンは通常、ある程度、限られたルールに従っています。この仮定に基づいて、SHENet は暗黙のシーン ルールを学習することで人の将来の軌道を予測します。この記事は自動運転ハート様よりオリジナル記事として認定されました!著者の個人的な理解では、人間の動きにはランダム性と主観性があるため、現時点では人の将来の軌道を予測することは依然として困難な問題です。ただし、制約のあるシーンでの人間の動きのパターンは、シーンの制約 (フロア プラン、道路、障害物など) や人間対人間、または人間対オブジェクトの対話性によって異なることがよくあります。
 iPhone 15のUSB Cをマウスに接続するにはどうすればよいですか?
Oct 23, 2023 pm 11:13 PM
iPhone 15のUSB Cをマウスに接続するにはどうすればよいですか?
Oct 23, 2023 pm 11:13 PM
Apple はついに iPhone 15 および 15 Pro シリーズに USBC 接続を追加し、多くのコンピュータ アクセサリを iPhone で使用できるようにしました。コンピューター? 1: まず設定に入り、補助使用 2: タッチを選択 3: 補助タッチを選択 4: 補助タッチを有効にする 5: 開始後、iPad のトラックパッドを使用するときと同じようにドットが表示され、各ボタンの設定を設定します。ホーム画面キーや補助キーなどのさまざまな機能を使用するには、次の手順で「設定」の「補助使用」に進みます。 6: タッチを選択 7: Assistive Touch 8: デバイスを選択 9: 接続したマウスの名前を選択 10: ボタンを追加し、マウスに設定したいボタンをクリックします 11: その後
 LimSim++: 自動運転におけるマルチモーダル大型モデルの新たな段階
Mar 12, 2024 pm 03:10 PM
LimSim++: 自動運転におけるマルチモーダル大型モデルの新たな段階
Mar 12, 2024 pm 03:10 PM
論文名: LimSim++: AClosed-LoopPlatform for DeployingMultimodalLLMsinAutonomousDriving プロジェクトホームページ: https://pjlab-adg.github.io/limsim_plus/ シミュレータの概要 マルチモーダル大規模言語モデル ((M)LLM) として、人工知能の自動運転技術への応用が徐々に注目を集めています。これらのモデルは、強力な一般化された理解と論理的推論機能を通じて、安全で信頼性の高い自動運転システムの構築を強力にサポートします。 HighwayEnv、CA などの既存の閉ループ シミュレーション プラットフォームがありますが、
 MicrosoftがVisual Studio Code 1.80をアップデート
Jul 10, 2023 pm 08:13 PM
MicrosoftがVisual Studio Code 1.80をアップデート
Jul 10, 2023 pm 08:13 PM
Microsoft は最近 Visual Studio Code 1.80 をリリースしました。この更新プログラムは 7 月にリリースされましたが、公式はまだこれを 6 月の更新プログラムと呼んでいます。このアップデートをインストールすると、内蔵端末に画像を直接表示できるようになり、補助機能も最適化されました。以前にリリースされた Visual Studio Code のプレビュー バージョンでは、ターミナル内の画像のサポートがサポートされており、新しい 1.80 バージョンではデフォルトで有効になっています。端末で画像を表示できるようにするために、画像のピクセル データは特別なエスケープ シーケンスを通じてテキストに変換され、最終的に端末に書き込まれます。一般的な PNG、GIF、または JPEG ファイルをターミナルにパイプする場合は、imgcatpython パッケージをインストールしてから、ターミナルで imgc を実行する必要があります。
 星鉄の最強補助キャラランキング、8人の補助キャラの中で誰が一番強いのでしょうか?その中の一人はまさに「神の中の神」と言えるでしょう!
Feb 18, 2024 pm 03:33 PM
星鉄の最強補助キャラランキング、8人の補助キャラの中で誰が一番強いのでしょうか?その中の一人はまさに「神の中の神」と言えるでしょう!
Feb 18, 2024 pm 03:33 PM
Collapse Star Railroad の補助的な役割は特に重要です。優れた補助的な役割はチームを大幅に向上させることができます。今日、Xiaofang は Star Railroad のどの補助キャラクターを最初に育成できるかを検討します。 T2: 指定チーム戦略カード ユーコン ユーコンは、メイン C に高いダブルバーストと攻撃ボーナスを提供できるだけでなく、高いタフネス削り能力も備えており、現在核爆発には必須のキャラクターですが、ユーコンが必要とするペースは厳格で実戦では手動操作に頼る部分が大きくオートの強さも不安定であり、また非ライフ6のスカイコントロールはBUFF範囲が足りないという問題も抱えている。したがって、現時点では Yu Kong のトレーニングの優先順位は比較的低く、ペースと手動のゲームプレイを好む場合、または Moon Drinking Fox チームや Crow Yu チームを頻繁に使用する場合を除き、他のサポートを選択することをお勧めします。エスタ サーバー立ち上げ時に無料で配布される補助キャラクターとして、皆様のお役に立つことができます
 『レジェンド・オブ・ヘヴン』のおすすめサブセレクション
Jan 14, 2024 pm 08:21 PM
『レジェンド・オブ・ヘヴン』のおすすめサブセレクション
Jan 14, 2024 pm 08:21 PM
Legend of Tianjing は、2 次元グラフィックスを使用してプレイヤーにユニークなおとぎ話の冒険をもたらす、非常に興味深い中国風のカード モバイル ゲームです。ゲームでは、何百もの悪魔の精霊を召喚して一緒に戦うことができます。ゲームではラインナップが非常に重要ですが、レジェンド オブ スカイ レルムのサポートを選択するにはどうすればよいですか?以下、編集者がお届けする『レジェンド・オブ・ヘブン』のおすすめ副セレクションです。もっと知りたい方はお早めに! 「空の伝説」の補助選択は、補助サポート(チームサポート、チームメイトの回復)、鉄壁のサポート、流れるような出力を推奨します。風系のSP「ドラゴンプリンス」をご存知ですか?彼がいれば星5でバトルが可能で、高星には出力能力もあり、欲しいものリストに必ず入ってくるでしょう。彼の吸血オーラは治療の半分を提供でき、戦闘終了まで持続して脆弱なバフを 20 回スタックできます。1 回スタックするとダメージが 15% 増加し、ボーナスのスタンを提供します。
 ADAS システムのセンサーをどのように配置すべきかについて説明した記事
May 05, 2023 am 10:49 AM
ADAS システムのセンサーをどのように配置すべきかについて説明した記事
May 05, 2023 am 10:49 AM
この記事では、まず、先進運転支援システムにおけるセンサー配置戦略の重要性を紹介し、前方監視スマート カメラ、前方および側方ミリ波レーダー (77GHz/22GHz)、超音波レーダー、サラウンドビューなど、先進運転支援システムのセンサーの種類を提案します。各センサーの性能特性を簡単に説明します。次に、現在の量産サプライヤーのソリューションを例として、検出距離、検出範囲、外部レイアウト環境の要件など、さまざまなセンサー性能パラメーターを詳細に紹介します。本稿では、車両単体で異なるセンサーを使用することで実現できる機能と、異なる運転支援レベルや異なる機能の組み合わせによる異なるセンサーの融合戦略を紹介します。最後に、達成する必要がある性能要件と検出範囲の冗長性に基づいて、車両にさまざまなセンサーを合理的に取り付ける方法を紹介します。
 ドライバーの路上での「神聖なアシスト」! BIT、運転の安全性を向上させるハイブリッドブレインコンピューターインターフェース運転支援システムを開発
Apr 09, 2023 pm 05:41 PM
ドライバーの路上での「神聖なアシスト」! BIT、運転の安全性を向上させるハイブリッドブレインコンピューターインターフェース運転支援システムを開発
Apr 09, 2023 pm 05:41 PM
人々の生活水準の向上に伴い、自動車は何千もの世帯に普及しました。しかし、車両は移動の利便性を提供する一方で、交通事故はドライバーや歩行者の生命の安全に対する重大な脅威にもなっています。世界保健機関の不完全な 2018 年の統計によると、交通事故は死傷者と経済的損失を引き起こす重要な要因の 1 つです。交通事故は毎年約135万人が死亡し、2,000万人から5,000万人が負傷しています。毎年、GDPの3%近くが交通事故によって費やされています。中でも疲労運転は、スピード違反に次いで交通事故を引き起こす重要な要因となっています。したがって、たとえ「経験豊富なドライバー」であっても、安全運転は簡単な問題ではありません。運転安全の問題に基づいて、北京工業大学機械車両工学部のBi Luzheng教授のインテリジェント・ヒューマン・マシン・システム・チームのLuo Long氏は最近、
