

ツールフォーマーの解釈

大規模言語モデル (LLM) は、限られたテキスト データを使用して新しいタスクを解決する際に驚くべき利点を示しています。しかし、それにもかかわらず、次のような他の点で制限があります。
- 最新情報へのアクセスの欠如
- 事実について空想する傾向
- 低リソース言語の問題点
- 正確な計算のための数学的スキルの欠如
- 時間プロセスの理解の欠如
大規模なモデルを使用してより多くの問題を解決する方法?記事「TaskMatrix.AIの解釈」では、TaskMatrix.AIはToolformerとchatGPTを組み合わせたもので、基本モデルを何百万ものAPIと接続してタスクを完了します。では、ツールフォーマーとは何でしょうか?
Toolformer は、電卓、Wikipedia 検索、辞書検索など、API の使用を必要とする問題を解決できる Meta の新しいオープンソース モデルです。 Toolformer は、ツールを使用する必要があることを認識し、使用するツールとツールの使用方法を決定します。 Toolformers の使用例は、あらゆる質問に対する即時検索結果の提供から、町の最高のレストランなどのコンテキスト情報の提供まで、無限に広がる可能性があります。
1.Toolformer とは何ですか?
ツールフォーマーとは何ですか?つまり、Toolformer は、ツールの使用方法を自ら学習できる言語モデルです。
Toolformer は、自己教師あり学習手法を使用してトレーニングされた、67 億個のパラメーターを備えた事前トレーニング済み GPT-J モデルに基づいています。このアプローチには、既存のテキスト データセットを拡張するための API 呼び出しのサンプリングとフィルタリングが含まれます。
Toolformer は、次の 2 つの要件を通じて、ツールの使用方法を自己学習する LLM のタスクを完了したいと考えています。
- ツールの使用方法は、指導者を必要とせずに自己監視を通じて学習する必要があります。多くの肉体労働に注意してください。
- LM は汎用性を失わず、どのツールをいつどのように使用するかを自分で決定できる必要があります。
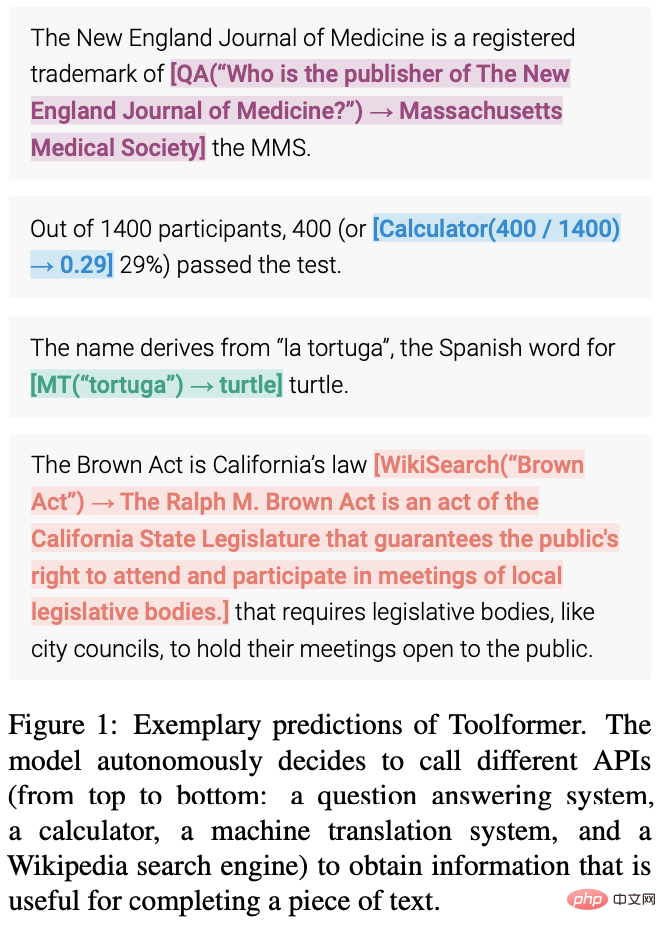
次の図は、Toolformer の予測 (データ サンプルに埋め込まれた API 呼び出しなど) を示しています。
2. Toolformer のアーキテクチャと実装方法
ChatGPT の中核機能の 1 つは、コンテキストベースの学習 (インコンテキスト学習) です。これは、モデルが特定のコンテキストまたは環境から提示される機械学習方法を指します。例から。コンテキスト学習の目標は、特定のコンテキストや状況に適した言語を理解し、生成するモデルの能力を向上させることです。自然言語処理 (NLP) タスクでは、特定のプロンプトや質問に対する応答を生成するように言語モデルをトレーニングできます。では、Toolformer はどのように In-Context Learning を活用しているのでしょうか?
Toolformer は、API 呼び出しを通じてさまざまなツールの使用を可能にする大規模な言語モデルです。各 API 呼び出しの入力と出力は、セッション内で自然に流れるように、一連のテキスト/会話としてフォーマットする必要があります。

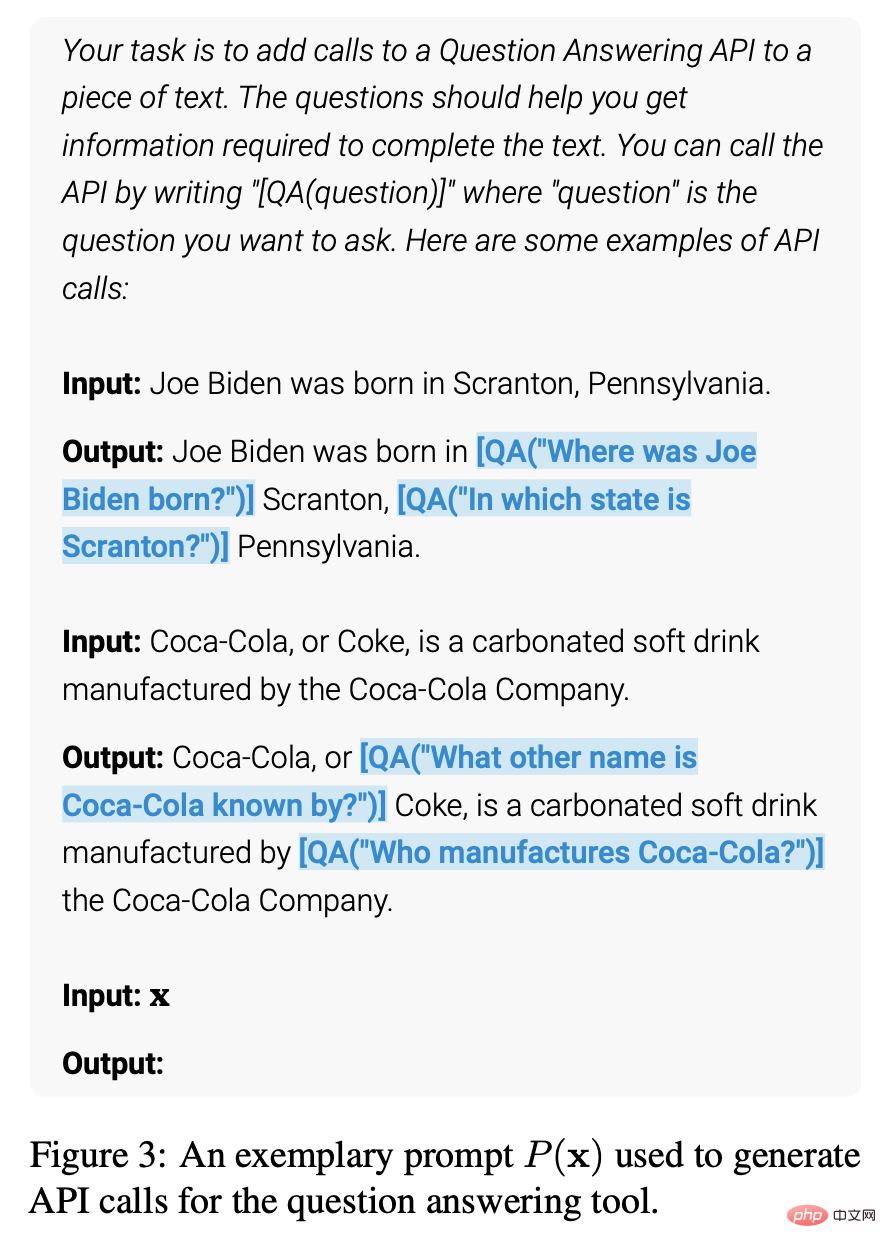
上の画像からわかるように、Toolformer はまずモデルのコンテキスト学習機能を活用して、潜在的な多数の API 呼び出しをサンプリングします。
これらの API 呼び出しを実行し、取得した応答が将来のトークンの予測に役立ち、フィルター基準として使用できるかどうかを確認します。フィルタリング後、さまざまなツールへの API 呼び出しが生データ サンプルに埋め込まれ、その結果、モデルが微調整された強化されたデータセットが生成されます。
具体的には、上の図は、質問と回答ツールを使用してこのタスクを実行するモデルを示しています:
- LM データセットにはサンプル テキストが含まれています: 「ピッツバーグ」の場合はプロンプト「ピッツバーグ」と入力してくださいとしても知られています。」は「鋼鉄都市」としても知られています。
- 正しい答えを見つけるには、モデルが API 呼び出しを行って正しく行う必要があります。
- いくつかの API 呼び出し、特に「ピッツバーグは他にどのような名前で知られていますか?」および「ピッツバーグはどの国にありますか?」がサンプリングされました。
- 対応する答えは「Steel City」と「United States」です。最初の答えの方が優れているため、API 呼び出し「ピッツバーグは [QA("ピッツバーグの他の名前は何によって知られていますか?") -> Steel City] the Steel City とも呼ばれる、新しい LM データセットに組み込まれます。 。
- これには、予期される API 呼び出しと応答が含まれています。この手順を繰り返して、さまざまなツール (API 呼び出しなど) を使用して新しい LM データセットを生成します。
したがって、LM はテキストに埋め込まれた API 呼び出しを使用して大量のデータに注釈を付け、次にこれらの API 呼び出しを使用して LM を微調整して有用な API 呼び出しを実行します。これが自己教師ありトレーニングの仕組みであり、このアプローチの利点は次のとおりです。
- 手動の注釈の必要性が少なくなります。
- API 呼び出しをテキストに埋め込むことで、LM は複数の外部ツールを使用してコンテンツを追加できるようになります。
Toolformer は、各タスクにどのツールが使用されるかを予測することを学習します。
2.1 API 呼び出しのサンプリング
次の図は、Toolformer がユーザー入力に応じて API 呼び出しの開始と終了を表すために と を使用することを示しています。 API ごとにプロンプトを記述すると、Toolformer がサンプルに関連する API 呼び出しの注釈を付けることが促進されます。
Toolformer は、指定されたシーケンスの継続の可能性として各トークンに確率を割り当てます。このメソッドは、シーケンス内の各位置で API 呼び出しを開始するために ToolFormer によって割り当てられた確率を計算することにより、API 呼び出しの候補位置を最大 k 個サンプリングします。指定されたしきい値よりも確率が高い位置が保持されます。各位置について、API 呼び出しの接頭辞とシーケンス終了マーカーの接尾辞が付いたシーケンスを使用して Toolformer からサンプリングすることによって、最大 m 個の API 呼び出しが取得されます。
2.2 API 呼び出しの実行
API 呼び出しの実行は、呼び出しを実行しているクライアントに完全に依存します。クライアントは、別のニューラル ネットワークから Python スクリプト、大規模なコーパスを検索する検索システムまで、さまざまな種類のアプリケーションにすることができます。クライアントが呼び出しを行うと、API は単一のテキスト シーケンス応答を返すことに注意することが重要です。この応答には、呼び出しの成功または失敗のステータス、実行時間など、呼び出しに関する詳細情報が含まれています。
したがって、正確な結果を得るために、クライアントは正しい入力パラメータが提供されていることを確認する必要があります。入力パラメータが正しくない場合、API は間違った結果を返す可能性があり、それはユーザーにとって受け入れられない可能性があります。さらに、クライアントは、通話中の接続の中断やその他のネットワークの問題を回避するために、API への接続が安定していることを確認する必要があります。
2.3 API 呼び出しのフィルタリング
フィルタリング プロセス中、Toolformer は、API 呼び出し後のトークンを介して Toolformer の加重クロスエントロピー損失を計算します。
次に、2 つの異なる損失計算を比較します。
(i) 1 つは、Toolformer への入力として結果を含む API 呼び出しです。
(ii) 1 つは API 呼び出しなし、またはAPI 呼び出しが行われましたが、結果が返されませんでした。
API 呼び出しに提供される入力と出力により、Toolformer が将来のトークンを予測しやすくなる場合、API 呼び出しは有用であるとみなされます。フィルタリングしきい値を適用して、2 つの損失の差がしきい値以上である API 呼び出しのみを保持します。
2.4 モデルの微調整
最後に、Toolformer は残りの API 呼び出しを元の入力とマージし、新しい API 呼び出しを作成してデータセットを強化します。つまり、拡張されたデータセットには、元のデータセットと同じテキストが含まれており、API 呼び出しのみが挿入されています。
次に、新しいデータ セットを使用して、標準言語モデリングの目標を使用して ToolFormer を微調整します。これにより、拡張されたデータセットでのモデルの微調整が、元のデータセットでの微調整と同じコンテンツに公開されるようになります。 API 呼び出しを正確な位置に挿入し、ヘルプ モデルを使用して将来のトークンの入力を予測することで、拡張データを微調整することで、言語モデルが独自のフィードバックに基づいて API 呼び出しをいつどのように使用するかを理解できるようになります。
2.5 推論
推論中、言語モデルが API 呼び出しに対して次に期待される応答を示す「→」トークンを生成すると、デコード プロセスは中断されます。次に、適切な API を呼び出して応答を取得し、応答とトークンを挿入した後デコードを続行します。
この時点で、取得した応答が前のトークンから期待される応答と一致することを確認する必要があります。一致しない場合は、正しい応答を取得するように API 呼び出しを調整する必要があります。デコードに進む前に、推論プロセスの次のステップに備えていくつかのデータ処理を実行する必要もあります。これらのデータプロセスには、応答の分析、コンテキストの理解、推論パスの選択が含まれます。したがって、推論プロセス中に、API を呼び出して応答を取得するだけでなく、推論プロセスの正確さと一貫性を確保するために一連のデータ処理と分析を実行する必要があります。
2.6 API ツール
Toolformer で使用できるすべての API ツールは、次の 2 つの条件を満たす必要があります:
- 入力/出力はテキストとして表現される必要があります。順序 。
- これらのツールの使用方法を示すデモが用意されています。
Toolformer の初期実装では、次の 5 つの API ツールがサポートされています。
- Q&A: これは、簡単な事実に関する質問に答える別の LM です。
- 電卓: 現在、基本的な四則演算と小数点第 2 位への四捨五入のみをサポートしています。
- Wiki 検索: Wikipedia から切り取った短いテキストを返す検索エンジン。
- 機械翻訳システム: あらゆる言語のフレーズを英語に翻訳できる LM。
- Calendar: 入力を受け付けずに現在の日付を返すカレンダーへの API 呼び出し。
次の図は、使用されるすべての API の入力例と出力例を示しています:

3. アプリケーション例
Toolformer は、LAMA、数学データセット、質問応答、時間データセットなどのタスクではベースライン モデルや GPT-3 よりも優れていますが、多言語質問応答では他のモデルよりもパフォーマンスが劣ります。 Toolformer は、LAMA API、電卓 API、Wikipedia 検索ツール API などの API 呼び出しを使用してタスクを完了します。
3.1 LAMA
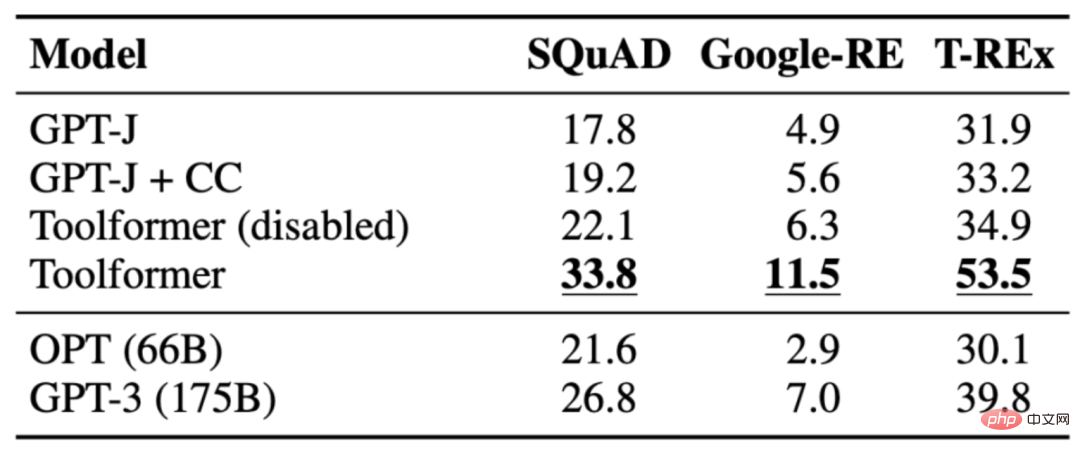
課題は、事実が欠けている陳述を完成させることです。 Toolformer は、ベースライン モデルだけでなく、GPT-3 などのより大きなモデルよりも優れたパフォーマンスを発揮します。次の表は、LAMA API 呼び出しを通じて取得された結果を示しています。
3.2 数学的データセット
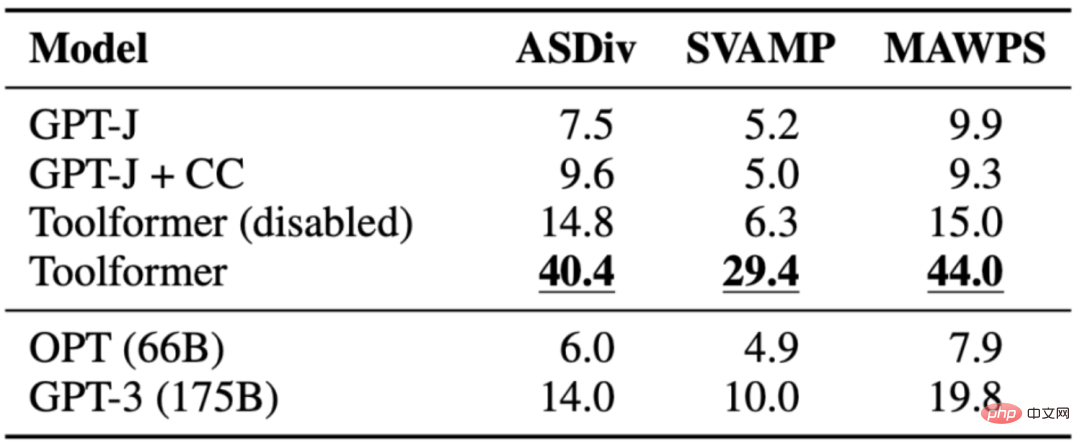
タスクは、数学的推論を評価することです。 Toolformer のさまざまなベースライン モデルを比較する機能。 Toolformer は、おそらく API 呼び出しの例が微調整されているため、他のモデルよりもパフォーマンスが優れています。モデルに API 呼び出しを許可すると、すべてのタスクのパフォーマンスが大幅に向上し、OPT や GPT-3 などのより大きなモデルよりも優れたパフォーマンスを発揮します。ほとんどの場合、モデルは計算ツールに助けを求めることにしました。
次の表は、電卓 API 呼び出しを通じて取得された結果を示しています。
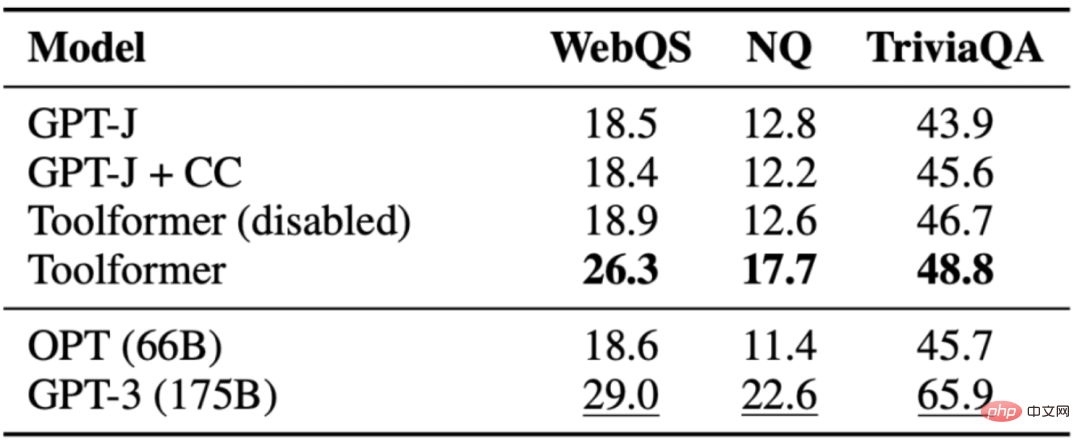
3.3 質問の回答
課題は、質問に答えることです。Toolformer は、同じサイズのベースライン モデルよりも優れていますが、GPT-3(175B) よりも優れています。 Toolformer は、このタスクのほとんどの例で Wikipedia の検索ツールを利用します。次の表は、Wikipedia 検索ツール API 呼び出しを通じて取得された結果を示しています。
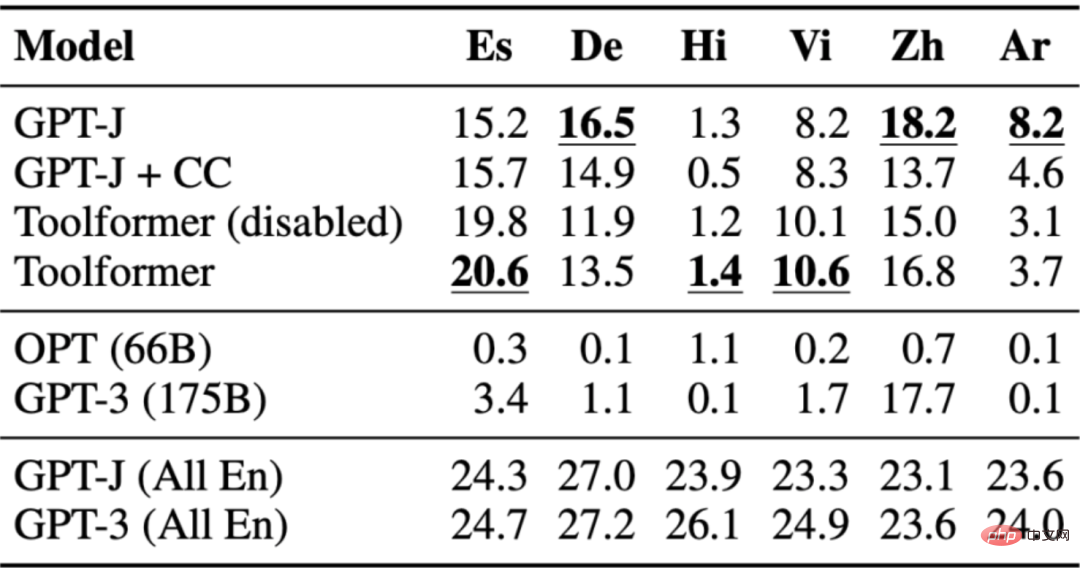
3.4 多言語の質問と回答
質問と回答データセットは、多言語質問応答ベンチマーク MLQA で使用されます。このベンチマークには、英語のコンテキスト文と、アラビア語、ドイツ語、スペイン語、ヒンディー語、ベトナム語、または簡体字中国語の質問が含まれています。 Toolformer は、おそらく CCNet がすべての言語にわたって調整されていないため、ここでは最も優れたパフォーマンスを発揮するわけではありません。
次の表は、Wikipedia 検索ツール API 呼び出しを通じて取得された結果を示しています。
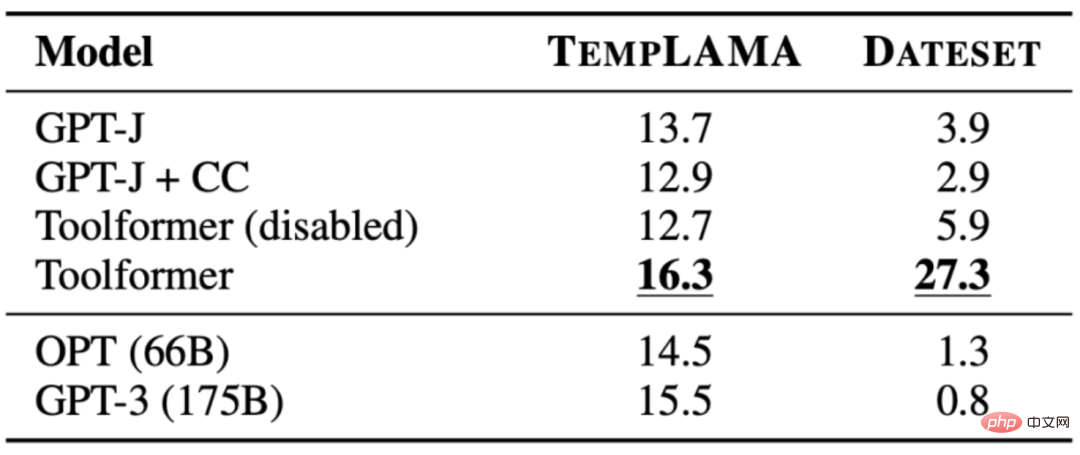
3.5 時間データセット
課題は、質問に答えるために現在の日付がどこに重要であるかを知ることです。 Toolformer はベースラインを上回るパフォーマンスを発揮できましたが、明らかにカレンダー ツールを 100% 活用していませんでした。代わりに、Wikipedia 検索を使用します。次の表は、Wikipedia 検索ツール API 呼び出しを通じて取得された結果を示しています:
4. ToolFormer の制限
Toolformer にはまだ次のような機能があります。いくつかの制限 複数のツールを同時に使用できないこと、多すぎる結果を返すツールを処理できないこと、非効率につながる入力文言への敏感さ、高い計算コストにつながる可能性のある使用コストを考慮していないことなどの制限。詳細は次のとおりです:
- 各ツールの API 呼び出しは独立して生成されるため、Toolformer は 1 つのプロセスで複数のツールを使用できません。
- 特に、何百もの異なる結果を返す可能性のあるツール (検索エンジンなど) の場合、Toolformer は対話的に使用できません。
- Toolformer を使用してトレーニングされたモデルは、入力の正確な表現に非常に敏感です。このアプローチは一部のツールでは非効率的で、少数の有用な API 呼び出しを生成するには広範なドキュメントが必要です。
- 各ツールの使用を決定する場合、その使用コストは考慮されないため、計算コストが高くなる可能性があります。
5. 概要
Toolformer は、インコンテキスト学習を使用して、特定のコンテキストや状況に適した言語を理解して生成するモデルの能力を向上させる大規模な言語モデルです。 API 呼び出しを使用して大量のデータに注釈を付け、次にこれらの API 呼び出しを使用してモデルを微調整し、有用な API 呼び出しを実行します。 Toolformer は、各タスクにどのツールが使用されるかを予測することを学習します。ただし、Toolformer には、プロセス内で複数のツールを使用できないことや、何百もの異なる結果を返す可能性のある対話型ツールを使用できないことなど、いくつかの制限があります。
#[参考資料と関連書籍]- Toolformer: Language Models Can Teach Self to Use Tools、https://arxiv.org/pdf/2302.04761.pdf
- Meta の Toolformer は API を使用してゼロショット NLP タスクで GPT-3 を上回ります。 https://www.infoq.com/news/2023/04/meta-toolformer/
- Toolformer: 言語モデルで教えられる自分自身でツールを使用する (2023)、https://kikaben.com/toolformer-2023/
- ツールフォーマーの分析、https://www.shape.ai/blog/breaking-down-toolformer
- Toolformer: Meta が Wikipedia を使用した新しいモデルで ChatGPT レースに再参入、https://thechainsaw.com/business/meta-toolformer-ai/
- Toolformer 言語モデルは独自の外部ツールを使用します、https://the-decoder.com/toolformer- language-model-uses-external-tools-on-its-own/
以上がツールフォーマーの解釈の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7467
7467
 15
1376
52
77
11
18
20
15
1376
52
77
11
18
20

 世界で最も強力なオープンソース MoE モデルが登場。GPT-4 に匹敵する中国語機能を備え、価格は GPT-4-Turbo のわずか 1% 近くです
May 07, 2024 pm 04:13 PM
世界で最も強力なオープンソース MoE モデルが登場。GPT-4 に匹敵する中国語機能を備え、価格は GPT-4-Turbo のわずか 1% 近くです
May 07, 2024 pm 04:13 PM
従来のコンピューティングを超える能力を備えているだけでなく、より低コストでより効率的なパフォーマンスを実現する人工知能モデルを想像してみてください。これは SF ではありません。世界で最も強力なオープンソース MoE モデルである DeepSeek-V2[1] が登場しました。 DeepSeek-V2 は、経済的なトレーニングと効率的な推論の特徴を備えた強力な専門家混合 (MoE) 言語モデルです。これは 236B のパラメータで構成されており、そのうち 21B は各マーカーをアクティブにするために使用されます。 DeepSeek67B と比較して、DeepSeek-V2 はパフォーマンスが優れていると同時に、トレーニング コストを 42.5% 節約し、KV キャッシュを 93.3% 削減し、最大生成スループットを 5.76 倍に高めます。 DeepSeek は一般的な人工知能を研究する会社です
 こんにちは、電気アトラスです!ボストン・ダイナミクスのロボットが復活、180度の奇妙な動きにマスク氏も恐怖
Apr 18, 2024 pm 07:58 PM
こんにちは、電気アトラスです!ボストン・ダイナミクスのロボットが復活、180度の奇妙な動きにマスク氏も恐怖
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas は正式に電動ロボットの時代に突入します!昨日、油圧式アトラスが歴史の舞台から「涙ながらに」撤退したばかりですが、今日、ボストン・ダイナミクスは電動式アトラスが稼働することを発表しました。ボストン・ダイナミクス社は商用人型ロボットの分野でテスラ社と競争する決意を持っているようだ。新しいビデオが公開されてから、わずか 10 時間ですでに 100 万人以上が視聴しました。古い人が去り、新しい役割が現れるのは歴史的な必然です。今年が人型ロボットの爆発的な年であることは間違いありません。ネットユーザーは「ロボットの進歩により、今年の開会式は人間のように見え、人間よりもはるかに自由度が高い。しかし、これは本当にホラー映画ではないのか?」とコメントした。ビデオの冒頭では、アトラスは仰向けに見えるように地面に静かに横たわっています。次に続くのは驚くべきことです
 MLP に代わる KAN は、オープンソース プロジェクトによって畳み込みまで拡張されました
Jun 01, 2024 pm 10:03 PM
MLP に代わる KAN は、オープンソース プロジェクトによって畳み込みまで拡張されました
Jun 01, 2024 pm 10:03 PM
今月初め、MIT やその他の機関の研究者らは、MLP に代わる非常に有望な代替案である KAN を提案しました。 KAN は、精度と解釈可能性の点で MLP よりも優れています。また、非常に少数のパラメーターを使用して、多数のパラメーターを使用して実行する MLP よりも優れたパフォーマンスを発揮できます。たとえば、著者らは、KAN を使用して、より小規模なネットワークと高度な自動化で DeepMind の結果を再現したと述べています。具体的には、DeepMind の MLP には約 300,000 個のパラメーターがありますが、KAN には約 200 個のパラメーターしかありません。 KAN は、MLP が普遍近似定理に基づいているのに対し、KAN はコルモゴロフ-アーノルド表現定理に基づいているのと同様に、強力な数学的基礎を持っています。以下の図に示すように、KAN は
 AI が数学研究を破壊する!フィールズ賞受賞者で中国系アメリカ人の数学者が上位 11 件の論文を主導 | テレンス・タオが「いいね!」しました
Apr 09, 2024 am 11:52 AM
AI が数学研究を破壊する!フィールズ賞受賞者で中国系アメリカ人の数学者が上位 11 件の論文を主導 | テレンス・タオが「いいね!」しました
Apr 09, 2024 am 11:52 AM
AI は確かに数学を変えつつあります。最近、この問題に細心の注意を払っている陶哲軒氏が『米国数学協会会報』(米国数学協会会報)の最新号を送ってくれた。 「機械は数学を変えるのか?」というテーマを中心に、多くの数学者が意見を述べ、そのプロセス全体は火花に満ち、ハードコアで刺激的でした。著者には、フィールズ賞受賞者のアクシャイ・ベンカテシュ氏、中国の数学者鄭楽軍氏、ニューヨーク大学のコンピューター科学者アーネスト・デイビス氏、その他業界で著名な学者を含む強力な顔ぶれが揃っている。 AI の世界は劇的に変化しています。これらの記事の多くは 1 年前に投稿されたものです。
 Google は大喜び: JAX のパフォーマンスが Pytorch や TensorFlow を上回りました! GPU 推論トレーニングの最速の選択肢となる可能性があります
Apr 01, 2024 pm 07:46 PM
Google は大喜び: JAX のパフォーマンスが Pytorch や TensorFlow を上回りました! GPU 推論トレーニングの最速の選択肢となる可能性があります
Apr 01, 2024 pm 07:46 PM
Google が推進する JAX のパフォーマンスは、最近のベンチマーク テストで Pytorch や TensorFlow のパフォーマンスを上回り、7 つの指標で 1 位にランクされました。また、テストは最高の JAX パフォーマンスを備えた TPU では行われませんでした。ただし、開発者の間では、依然として Tensorflow よりも Pytorch の方が人気があります。しかし、将来的には、おそらくより大規模なモデルが JAX プラットフォームに基づいてトレーニングされ、実行されるようになるでしょう。モデル 最近、Keras チームは、ネイティブ PyTorch 実装を使用して 3 つのバックエンド (TensorFlow、JAX、PyTorch) をベンチマークし、TensorFlow を使用して Keras2 をベンチマークしました。まず、主流のセットを選択します
 テスラのロボットは工場で働く、マスク氏:手の自由度は今年22に達する!
May 06, 2024 pm 04:13 PM
テスラのロボットは工場で働く、マスク氏:手の自由度は今年22に達する!
May 06, 2024 pm 04:13 PM
テスラのロボット「オプティマス」の最新映像が公開され、すでに工場内で稼働可能となっている。通常の速度では、バッテリー(テスラの4680バッテリー)を次のように分類します:公式は、20倍の速度でどのように見えるかも公開しました - 小さな「ワークステーション」上で、ピッキング、ピッキング、ピッキング:今回は、それがリリースされたハイライトの1つビデオの内容は、オプティマスが工場内でこの作業を完全に自律的に行い、プロセス全体を通じて人間の介入なしに完了するというものです。そして、オプティマスの観点から見ると、自動エラー修正に重点を置いて、曲がったバッテリーを拾い上げたり配置したりすることもできます。オプティマスのハンドについては、NVIDIA の科学者ジム ファン氏が高く評価しました。オプティマスのハンドは、世界の 5 本指ロボットの 1 つです。最も器用。その手は触覚だけではありません
 FisheyeDetNet: 魚眼カメラに基づいた最初のターゲット検出アルゴリズム
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: 魚眼カメラに基づいた最初のターゲット検出アルゴリズム
Apr 26, 2024 am 11:37 AM
目標検出は自動運転システムにおいて比較的成熟した問題であり、その中でも歩行者検出は最も初期に導入されたアルゴリズムの 1 つです。ほとんどの論文では非常に包括的な研究が行われています。ただし、サラウンドビューに魚眼カメラを使用した距離認識については、あまり研究されていません。放射状の歪みが大きいため、標準のバウンディング ボックス表現を魚眼カメラに実装するのは困難です。上記の説明を軽減するために、拡張バウンディング ボックス、楕円、および一般的な多角形の設計を極/角度表現に探索し、これらの表現を分析するためのインスタンス セグメンテーション mIOU メトリックを定義します。提案された多角形モデルの FisheyeDetNet は、他のモデルよりも優れたパフォーマンスを示し、同時に自動運転用の Valeo 魚眼カメラ データセットで 49.5% の mAP を達成しました。
 Llama 70B を実行するシングル カードはデュアル カードより高速、Microsoft は FP6 を A100 オープンソースに強制導入
Apr 29, 2024 pm 04:55 PM
Llama 70B を実行するシングル カードはデュアル カードより高速、Microsoft は FP6 を A100 オープンソースに強制導入
Apr 29, 2024 pm 04:55 PM
FP8 以下の浮動小数点数値化精度は、もはや H100 の「特許」ではありません。 Lao Huang は誰もが INT8/INT4 を使用できるようにしたいと考え、Microsoft DeepSpeed チームは NVIDIA からの公式サポートなしで A100 上で FP6 の実行を開始しました。テスト結果は、A100 での新しい方式 TC-FPx の FP6 量子化が INT4 に近いか、場合によってはそれよりも高速であり、後者よりも精度が高いことを示しています。これに加えて、エンドツーエンドの大規模モデルのサポートもあり、オープンソース化され、DeepSpeed などの深層学習推論フレームワークに統合されています。この結果は、大規模モデルの高速化にも即座に影響します。このフレームワークでは、シングル カードを使用して Llama を実行すると、スループットはデュアル カードのスループットの 2.65 倍になります。 1つ
