

インテリジェント運転開発における主要な技術要素の概要

01 統合ポジショニング: 未来志向のインテリジェント運転のための重要な設計要素
インテリジェント運転の時代、自動車は新たな未来を変革します。自動車のソフトウェアとハードウェア、内部アーキテクチャ、業界の競争パターン、産業チェーンにおける価値の分配も大きく変化するでしょう。この変化の波の下で、インテリジェント運転は、運転支援の利用拡大、成熟した自動運転ソリューション、自動運転エコロジーの改善という 3 つの段階を連続的に経て、ハードウェア、ソフトウェア システム、商用化の 3 つのチャンスがもたらされると考えています。それぞれの操作。
その中で、ナビゲーションや測位の重要な要素となるHDマップ(高精細地図)も大幅な設計変更が行われます。これは主に次の重要な側面に反映されています:
- 高精度地図とナビゲーション マップ
ナビゲーション マップには、車線の長さと、関連する走行のおおよその道路状況が表示されます。高精度地図は非常に詳細な道路状況を提供します。道路標識、坂道、車線、車線の位置など。これらは HD マップ上でマークされます。高精度地図では、特定の信号機の位置も高精度のGPSデータでマークされています。したがって、無人車両が道路を走行する場合、グローバル経路計画で作成された経路が存在し、これらの経路が車線レベルの経路に変換される限り、無人車両は高架道路にマークされた各経路をたどることができます。 -定義地図 各車線のセンターラインを走行します。
- 高精度地図と他のモジュールの接続
高精度地図位置決め、予測、知覚、計画、安全性、シミュレーション、制御、人間とコンピューターの対話など、自動車の他のモジュールが接続されており、これらのすべてに高精度マップの助けが必要です。高精度の地図がなければこれらの機能を実装できないモジュールもありますが、高精度の地図があれば、より正確な情報を取得し、その時の交通状況により適した判断を下すことができます。ここでは、より詳細な技術的な内容については詳しく説明しません。一般的なアイデアを説明するだけです。
- 高精度地図と測位
測位における高精度マップの主な役割は、測位のために決定された静的オブジェクトに関する情報を提供することです。次に、無人車両は、これらの静的オブジェクトの情報に基づいて、マップ全体における相対位置を見つけることができます。これらの静止物体が独自の高精度緯度経度座標を持っていれば、無人車両はその緯度経度座標を基に自らの緯度経度座標を逆に求めることができ、高精度地図とライダーカメラによるセンサーフュージョンを実現します。方法。これにより、GPS データへの依存をなくすことができます。データがブロックされている場合、GPS データには非常に強いノイズが含まれるためです。もちろん、現段階では、レーダーとビジョンのセンサーフュージョンに基づく測位方法は、ディファレンシャル GPS によって提供されるデータほど正確ではありませんが、それでも測位方法です。結局のところ、GPS 信号が存在しない場合、車両は独自の位置情報なしでは走行できず、現時点では他の測位方法に頼るしかありません。
- 高精度地図と意思決定
高精度地図と意思決定の関係マップと意思決定モジュール さらにシンプルです。なぜなら、車両が将来進みたいルートと、その進みたいルートに関連する道路標識や信号機、道路情報を知っていれば、意思決定モジュールは現在の道路状況によりよく適合する決定を下すことができるからです。それは、将来何が起こるかを知っていれば、将来起こることに対処するために現在の行動を調整できるのと同じです。
- 高精度地図とシミュレーションモジュール
高精度地図の関係シミュレーションモジュールは、高精度の地図標準を備えた地図上で車両の位置を測ったり、他のアルゴリズムを検証したりする限り、実際のアプリケーションで車両が取得する情報はシミュレーションで取得する情報と同じであるため、理解しやすくなります。言い換えれば、シミュレーション環境で構築したコードは、実際の環境でもかなりの程度まで使用できるということです。
- #高精度地図と認識モジュール
- ##制御の具体的な内容が非常に詳しくてよくわかりません。しかし、舵角を制御するには高精度地図による車線中心線のデータが必須となります。車線はカメラに基づいて特定されますが、センターラインの位置はこの車線に基づいて特定されるためです。しかし、これらは依然として高精度地図によって提供されるデータほど正確ではありません。結局のところ、カメラベースの車線認識はリアルタイムであり、間違いなく時々間違いを犯します。また、長期間整備されておらず車線境界線が不鮮明になった場合、カメラが車線境界線情報を認識できなくなるため、高精度な地図が必要となります。車線は人間の運転において非常に重要なデータであるため、現在のカメラベースの自動運転は高速道路でしか実現できません。高速道路の車線だけが整備状態が良いからです。比較的簡単に特定できます。対照的に、都市環境の車線境界線は十分に維持されていません。したがって、都市部の道路でのカメラベースの自動運転はまだお勧めできません。
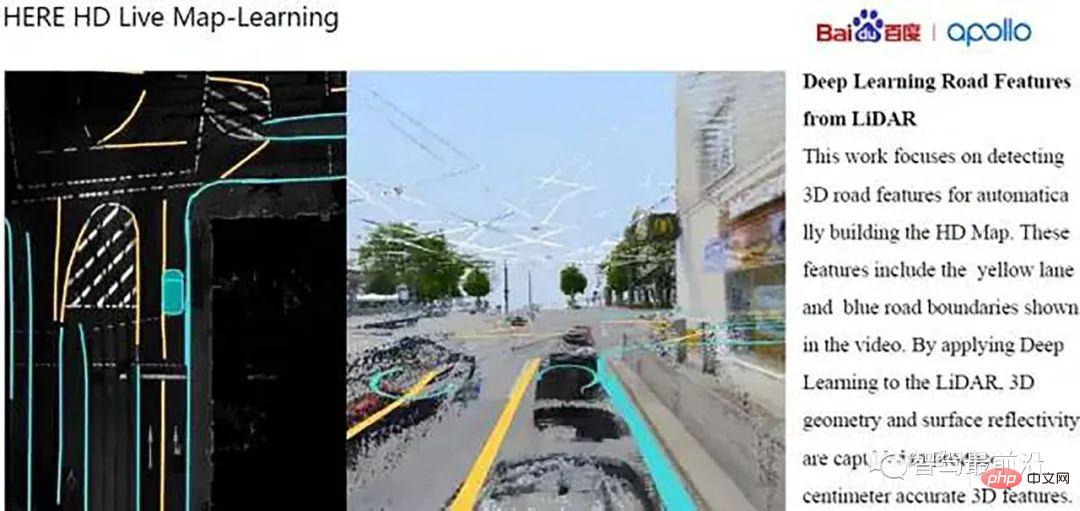
高精度地図の制作プロセス
- 正直に言うと、ここでも取り上げていませんが、先生から聞きました。高解像度の地図は、さまざまなセンサーを搭載した車両による道路の清掃に初めて使用されました。この種の車両は各道路をスキャンした後、関連する点群情報、カメラ情報、その他の高精度の経度および緯度情報を取得できます。スタッフはこの情報に基づいてオフラインでさらに編集します。ここで関係するのは、点群のスプライシング、車線、横断歩道、信号機などのカメラで認識された道路情報です。これらの静的なオブジェクトは、スタッフによってさらに確認され、マークされる必要があります。ただし、取得車両のカメラは、これらの道路関連の特徴を抽出するために予備的な特徴認識を実行します。しかし、結局のところ、それはコンピュータ ビジョンに基づいており、抽出された情報は 100% 正しいわけではなく、間違っていたり、注釈が適切にマークされていない可能性があります。したがって、最後のステップでは依然としてスタッフが最終確認と採点を行う必要があります。
#エッジコンピューティングを支える高精度地図作成プロセス V2X 高精度地図サービス
- #将来の自動運転の開発は、主にインテリジェンスとネットワークという 2 つの大きな方向に向かって進むでしょう。焦点は、車両エンドのインテリジェンスからロードエンド、さらにはクラウドエンドのインテリジェンスへの段階的な移行にあります。高精度地図の展開において最も重要なポイントは、クラウド、道路側、車両側で行われる一連のアップグレードと変更です。その中で、クラウドの変化には主に高精度地図サービス、シャーディングされたデータ集約、データエッジ、データシャーディングが含まれます。ロードサイドエンドには主に、シャードマップのクラウドソーシング更新、マップのバージョン管理、マップの下請け、ロードサイドの動的情報の最適化、マップメッセージサービスなどのいくつかの側面が含まれます。自動車に適用する場合は、下請けのデータフュージョン、V2Xシーン復元、それに応じて更新される高精度マップエンジンが必要となる。
上記のマップの反復更新プロセスは、L4/L5 レベルの無人機能を実現し、関連するロボット制御モードを生成するために適用できます。また、商用車の実現にも使用して、最終的に無人運転や遠隔運転を実現することもできます。運転、ドライブ。
02 量産向け高精度統合位置決めソリューション
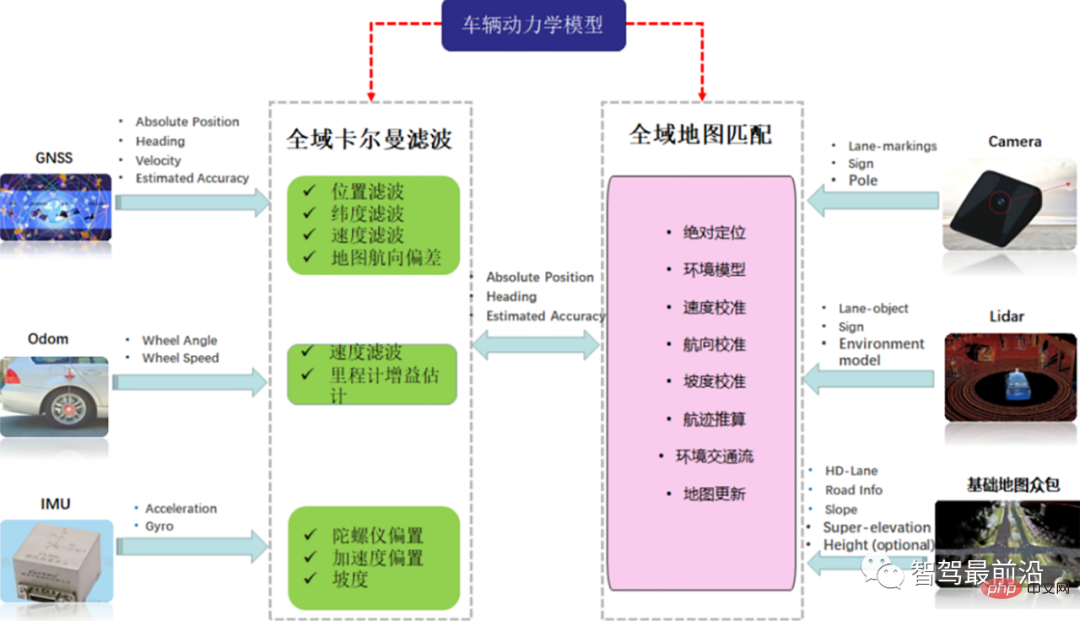
正確な位置決めを実現し、継続的に前進して機能性能を向上させるためには、高精度マップが必要であることは明らかです。独自の統合測位ソリューションを継続的に最適化することによって取得されます。このプロセスには 2 つの主要なソフトウェア アルゴリズムが含まれます。 1 つ目は、フルステート拡張カルマン フィルタリングを通じて車両姿勢の動的最適推定を実行すること、2 つ目は、視覚センサーを使用して道路環境の意味情報を取得し、正確なマップ マッチング アルゴリズムを通じて正確な位置を取得することです。さらに、経済性、フィット感、全体的なパフォーマンスを向上させる必要もあります。産業グレードの車載端末 RTK の構成を選択することにより、高性能産業グレード 32 ビット プロセッサ、内蔵高精度 RTK ボードを使用し、3G/4G/5G を介して Qianxun プラットフォームとのチャネルを確立し、GGA 情報を送信します差分サーバーに送信し、同時に差動信号を受信します。情報を受信後、正確な位置情報が RS232 経由で出力されます。
#03 マップの配布とマップの垂直パッケージ化
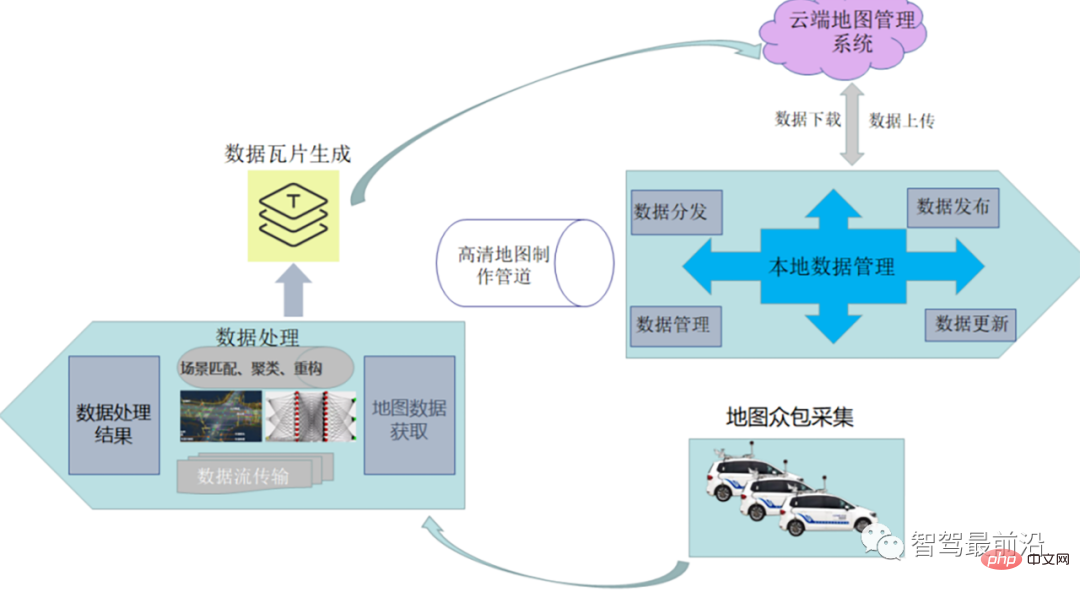
高品質の最も重要なプロセス精密地図 クラウドソーシングによる地図の収集と配布が含まれます。クラウドソーシングによる地図データの収集については、実際には、自動運転車自身のセンサーや他の低コストのセンサーハードウェアを通じてユーザーが収集した道路データをクラウドに送信してデータ融合し、データを改善することによってデータを改善することができます。データの集約精度を高め、高精度の地図の作成を完了します。実際、クラウドソーシングのプロセス全体には、物理センサーのレポート、マップ シーンのマッチング、シーンのクラスタリング、変更の検出と更新が含まれます。
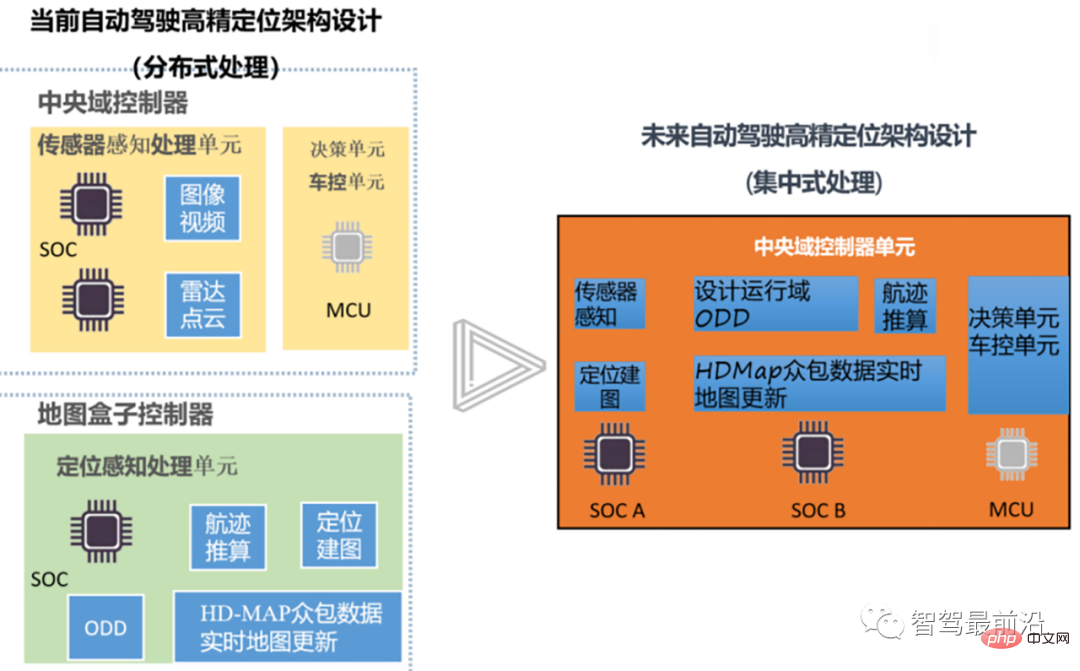
現在の自動運転システムの高精度地図アーキテクチャは依然として分散型アプローチを指向しており、その主な関心事には、地図クラウドソーシングによる収集、高精度地図の元情報の分析が含まれます。マップ ボックス、マップが他のセンサーとどのように相互作用するか、フュージョン用の入力データなど。ここで、将来の自動運転システムのアーキテクチャは、分散開発手法から集中開発手法へと進化し続けることに注意してください。集中型アプローチは、3 つまたは 2 つのステップで見ることができます。
ステップ 1: インテリジェント運転ドメインの完全集中型制御スキームつまり、インテリジェント運転 ADS とインテリジェント運転を統合します。 AVPシステムは完全集中管理を行い、両システムで処理される情報の処理方法を中央前処理装置により統合、予測、計画等の処理を行います。これに応じて、スマート運転とスマートパーキングに関連するすべてのセンシングおよびデータユニット(高精度地図、LIDAR、完全分散型カメラ、ミリ波レーダーなど)の処理方法が中央ドメイン制御ユニットに統合されます。
ステップ 2: インテリジェント ドライビング ドメインとインテリジェント コックピット ドメインの完全集中制御スキームこの方法は、完全集中分散方式、つまりインテリジェント コックピット ドメインを実現するための第 2 段階です。運転領域 コントローラーがカバーする全機能開発(自動運転、自動駐車など)とスマートコックピット領域がカバーする全機能開発(ドライバーモニタリングDMS、オーディオビジュアルエンターテインメントシステムiHU、計器表示システムIPなど)を統合し、覆われています。
ステップ 3: インテリジェント車両ドメイン全体の完全集中制御ソリューションこれは、インテリジェント ドライビング、インテリジェント コックピット、インテリジェント シャーシ ドメインを含む完全に統合された制御方法です。つまり、3 つの主要な機能が車両の中央制御ユニットに統合されており、このデータの後の処理により、ドメイン コントローラーのパフォーマンス (計算能力、帯域幅、ストレージなど) の要件がさらに高くなります。
ここで私たちが懸念している高精度地図測位の開発は、将来的にはより集中的な設計手法を指向することになります。これについて詳しく説明します。
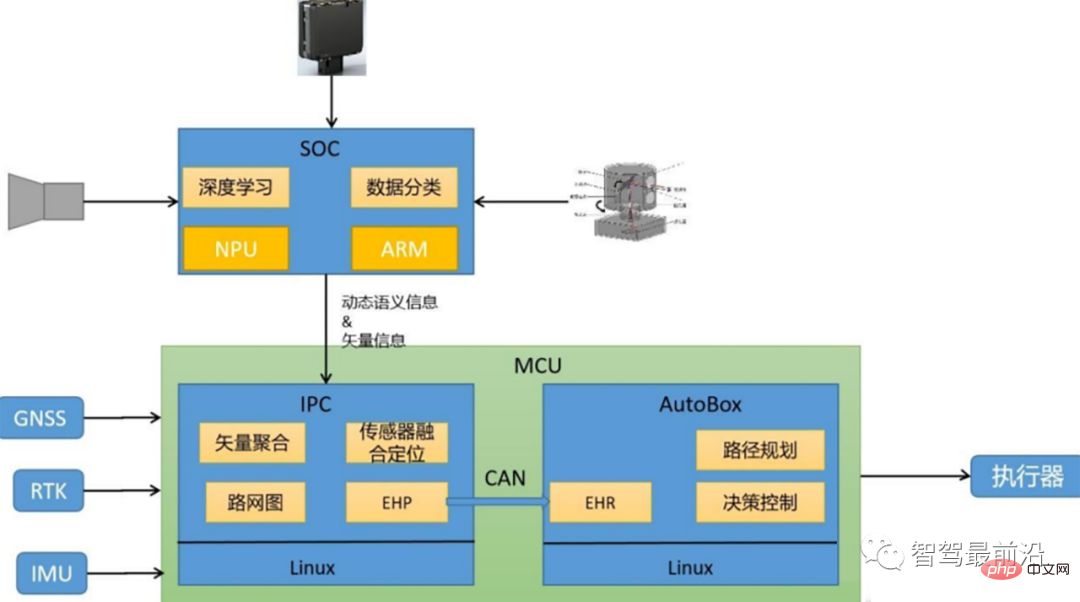
上図は、全体をクラウド制御した高精度地図センサーのデータ収集、データ学習、AI学習、高精度地図サービス、シミュレーションなどのサービスを対応させたものです。同時に、車両の移動および検証プロセス中に、物理センシング、動的データセンシング、地図ターゲットセンシング、測位、経路計画およびその他のコンテンツを通じて地図データが継続的に更新され、OTA がアップロードされます。クラウドに転送して、クラウドソース データ全体を更新します。 前回の記事では、高精度地図データが自動運転コントローラーで処理できる関連データを生成するプロセスについて説明しましたが、元のデータは高精度地図によって処理されることがわかっています。 EHPデータです。データには実際に次の主要なデータ サポートが含まれています: 1: 受信した外部 GPS 位置情報; 2: 地図と一致した位置情報; 3: 道路ネットワーク トポロジ情報を確立する; 4: CAN 経由でデータを送信する; 5: 部分航法データの融合; データは通常、HDMap センシング側からギガビット イーサネット経由で直接処理され、高精度地図中央処理装置に入力されます。このユニットを「高精度マップボックス」と呼びます。マップボックスを介してデータをさらに処理することにより(この実際の処理プロセスについては次の記事で詳しく説明します)、自動運転コントローラで処理できる EHR (実際には CanFD) データに変換できます。 次世代の自動運転システムに向けて、私たちは高精度の地図情報を自動運転ドメイン コントローラーに統合して全体の処理を行うことに取り組んでいます。マップ ボックスによって実行されるすべてのデータ解析作業を引き継ぐため、次の点に焦点を当てる必要があります: 1) 自動運転ドメイン コントローラーの AI チップかどうか高速に処理できる 洗練された地図に必要なすべてのセンサー データ? 2) 高精度測位地図の論理演算部は、センサーデータ情報の融合を行うのに十分な演算能力を持っていますか? 3) 基盤となるオペレーティング システム全体が機能安全要件を満たしていますか? 4) データ伝送の信頼性を確保するために、AI チップとロジック チップの間にどのような接続方法が使用されますか、Ethernet または CanFD ですか? 上記の質問に答えるには、次の図に示すように、コントローラーが高精度地図データを処理する方法を分析する必要があります。 は自動運転システムのAIチップで、将来の高精度化に向けたセンサーデータの基本処理を主に担います。カメラデータ、ライダーデータ、ミリ波データなどの地図データ処理基本的なデータ点群の融合とクラスタリングに加えて、応用処理方法には一般的に使用される深層学習アルゴリズムも含まれており、ARM コアは一般に中央コンピューティング処理に使用されます。 MCU は、自動運転ドメイン コントローラーの論理演算ユニットとして、元の高精度マップ ボックスに必要なすべての論理計算を実行します。フロントエンドのベクトル集約、センサーフュージョン測位、道路網マップの構築、そして最も重要なことに、EHP 情報を EHR 信号に変換するための元のマップ ボックス機能の置き換え (中央処理装置 MCU が EHP 情報を EHR 情報に効果的に変換する方法) が含まれます。詳細は後述)、Can ラインを介して効率的な信号伝送を行います。最後に、論理演算ユニットである AutoBox は、経路計画、意思決定制御などの演算に使用されます。 将来の自動運転では、元のマップ ボックスから高精度地図によって処理されたすべてのデータ情報が自動運転ドメインに統合される傾向があります。コントローラでは、統合ユニットとして車両ドメイン コントローラとの真の中央処理統合を確立することを目的としています。この方法により、より多くのコンピューティング リソースを節約できるだけでなく、AI データ処理アルゴリズムを高精度測位により適切に適用できるようになり、両者の環境理解の一貫性が保証されます。将来的には、高精度センサーデータ統合という重要な方向にさらに注意を払い、チップのコンピューティング能力、インターフェイス設計、帯域幅設計、機能安全設計にさらに力を入れる必要があります。 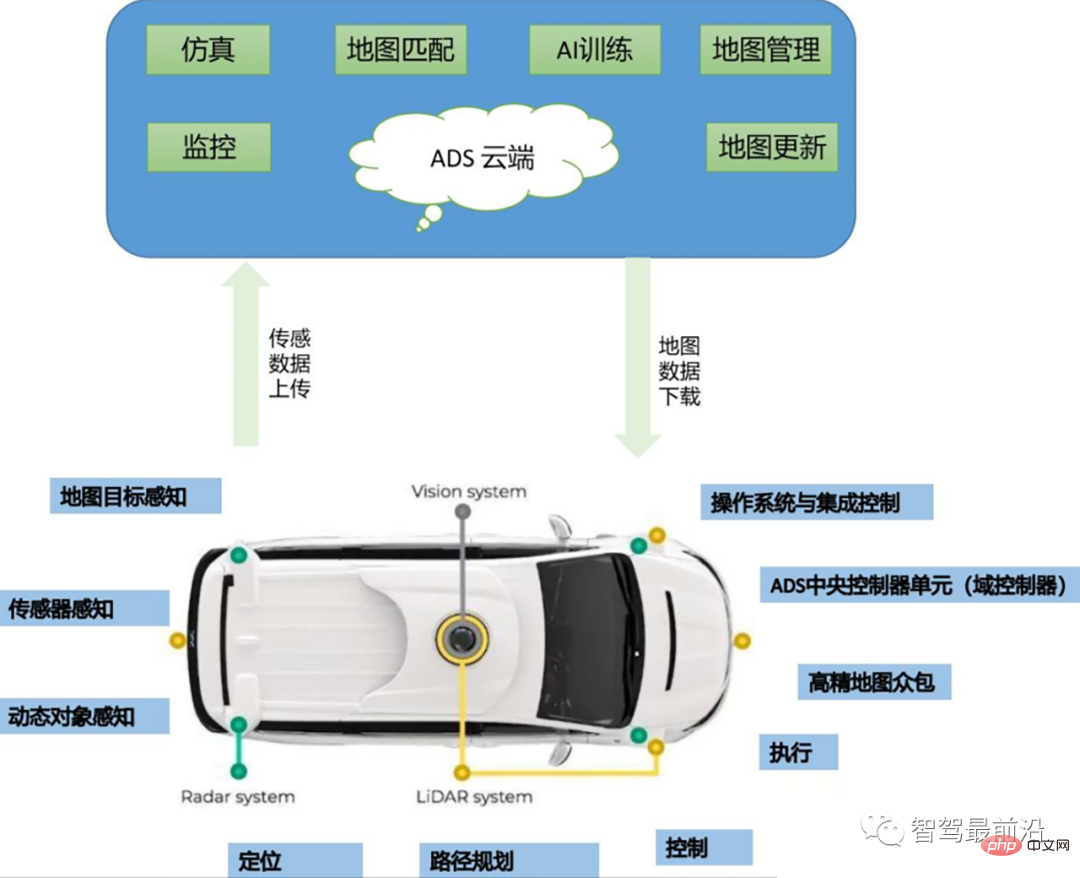
05 概要
以上がインテリジェント運転開発における主要な技術要素の概要の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7798
7798
 15
1644
14
1402
52
1299
25
1234
29
15
1644
14
1402
52
1299
25
1234
29

 なぜ自動運転ではガウス スプラッティングが非常に人気があるのに、NeRF は放棄され始めているのでしょうか?
Jan 17, 2024 pm 02:57 PM
なぜ自動運転ではガウス スプラッティングが非常に人気があるのに、NeRF は放棄され始めているのでしょうか?
Jan 17, 2024 pm 02:57 PM
上記と著者の個人的な理解 3 次元ガウシアンプラッティング (3DGS) は、近年、明示的な放射線フィールドとコンピューター グラフィックスの分野で出現した革新的なテクノロジーです。この革新的な方法は、数百万の 3D ガウスを使用することを特徴とし、主に暗黙的な座標ベースのモデルを使用して空間座標をピクセル値にマッピングする神経放射線場 (NeRF) 方法とは大きく異なります。明示的なシーン表現と微分可能なレンダリング アルゴリズムにより、3DGS はリアルタイム レンダリング機能を保証するだけでなく、前例のないレベルの制御とシーン編集も導入します。これにより、3DGS は、次世代の 3D 再構築と表現にとって大きな変革をもたらす可能性のあるものとして位置付けられます。この目的を達成するために、私たちは 3DGS 分野における最新の開発と懸念について初めて体系的な概要を提供します。
 自動運転シナリオにおけるロングテール問題を解決するにはどうすればよいでしょうか?
Jun 02, 2024 pm 02:44 PM
自動運転シナリオにおけるロングテール問題を解決するにはどうすればよいでしょうか?
Jun 02, 2024 pm 02:44 PM
昨日の面接で、ロングテール関連の質問をしたかと聞かれたので、簡単にまとめてみようと思いました。自動運転のロングテール問題とは、自動運転車におけるエッジケース、つまり発生確率が低い考えられるシナリオを指します。認識されているロングテール問題は、現在、単一車両のインテリジェント自動運転車の運用設計領域を制限している主な理由の 1 つです。自動運転の基礎となるアーキテクチャとほとんどの技術的問題は解決されており、残りの 5% のロングテール問題が徐々に自動運転の開発を制限する鍵となってきています。これらの問題には、さまざまな断片的なシナリオ、極端な状況、予測不可能な人間の行動が含まれます。自動運転におけるエッジ シナリオの「ロング テール」とは、自動運転車 (AV) におけるエッジ ケースを指します。エッジ ケースは、発生確率が低い可能性のあるシナリオです。これらの珍しい出来事
 カメラかライダーを選択しますか?堅牢な 3D オブジェクト検出の実現に関する最近のレビュー
Jan 26, 2024 am 11:18 AM
カメラかライダーを選択しますか?堅牢な 3D オブジェクト検出の実現に関する最近のレビュー
Jan 26, 2024 am 11:18 AM
0.前面に書かれています&& 自動運転システムは、さまざまなセンサー (カメラ、ライダー、レーダーなど) を使用して周囲の環境を認識し、アルゴリズムとモデルを使用することにより、高度な知覚、意思決定、および制御テクノロジーに依存しているという個人的な理解リアルタイムの分析と意思決定に。これにより、車両は道路標識の認識、他の車両の検出と追跡、歩行者の行動の予測などを行うことで、安全な運行と複雑な交通環境への適応が可能となり、現在広く注目を集めており、将来の交通分野における重要な開発分野と考えられています。 。 1つ。しかし、自動運転を難しくしているのは、周囲で何が起こっているかを車に理解させる方法を見つけることです。これには、自動運転システムの 3 次元物体検出アルゴリズムが、周囲環境にある物体 (位置を含む) を正確に認識し、記述することができる必要があります。
 座標系の変換を本当にマスターしましたか?自動運転と切り離せないマルチセンサーの問題
Oct 12, 2023 am 11:21 AM
座標系の変換を本当にマスターしましたか?自動運転と切り離せないマルチセンサーの問題
Oct 12, 2023 am 11:21 AM
最初のパイロットおよび重要な記事では、主に自動運転技術で一般的に使用されるいくつかの座標系と、それらの間の相関と変換を完了し、最終的に統合環境モデルを構築する方法を紹介します。ここでの焦点は、車両からカメラの剛体への変換 (外部パラメータ)、カメラから画像への変換 (内部パラメータ)、および画像からピクセル単位への変換を理解することです。 3D から 2D への変換には、対応する歪み、変換などが発生します。要点:車両座標系とカメラ本体座標系を平面座標系とピクセル座標系に書き換える必要がある 難易度:画像の歪みを考慮する必要がある 歪み補正と歪み付加の両方を画面上で補正する2. はじめに ビジョンシステムには、ピクセル平面座標系 (u, v)、画像座標系 (x, y)、カメラ座標系 ()、世界座標系 () の合計 4 つの座標系があります。それぞれの座標系には関係性があり、
 自動運転と軌道予測についてはこの記事を読めば十分です!
Feb 28, 2024 pm 07:20 PM
自動運転と軌道予測についてはこの記事を読めば十分です!
Feb 28, 2024 pm 07:20 PM
自動運転では軌道予測が重要な役割を果たしており、自動運転軌道予測とは、車両の走行過程におけるさまざまなデータを分析し、将来の車両の走行軌跡を予測することを指します。自動運転のコアモジュールとして、軌道予測の品質は下流の計画制御にとって非常に重要です。軌道予測タスクには豊富な技術スタックがあり、自動運転の動的/静的知覚、高精度地図、車線境界線、ニューラル ネットワーク アーキテクチャ (CNN&GNN&Transformer) スキルなどに精通している必要があります。始めるのは非常に困難です。多くのファンは、できるだけ早く軌道予測を始めて、落とし穴を避けたいと考えています。今日は、軌道予測に関するよくある問題と入門的な学習方法を取り上げます。関連知識の紹介 1. プレビュー用紙は整っていますか? A: まずアンケートを見てください。
 SIMPL: 自動運転向けのシンプルで効率的なマルチエージェント動作予測ベンチマーク
Feb 20, 2024 am 11:48 AM
SIMPL: 自動運転向けのシンプルで効率的なマルチエージェント動作予測ベンチマーク
Feb 20, 2024 am 11:48 AM
原題: SIMPL: ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving 論文リンク: https://arxiv.org/pdf/2402.02519.pdf コードリンク: https://github.com/HKUST-Aerial-Robotics/SIMPL 著者単位: 香港科学大学DJI 論文のアイデア: この論文は、自動運転車向けのシンプルで効率的な動作予測ベースライン (SIMPL) を提案しています。従来のエージェントセントとの比較
 エンドツーエンドおよび次世代の自動運転システムと、エンドツーエンドの自動運転に関する誤解について話しましょう。
Apr 15, 2024 pm 04:13 PM
エンドツーエンドおよび次世代の自動運転システムと、エンドツーエンドの自動運転に関する誤解について話しましょう。
Apr 15, 2024 pm 04:13 PM
この 1 か月間、いくつかのよく知られた理由により、私は業界のさまざまな教師やクラスメートと非常に集中的な交流をしてきました。この交換で避けられない話題は当然、エンドツーエンドと人気の Tesla FSDV12 です。この機会に、現時点での私の考えや意見を整理し、皆様のご参考とご議論に役立てたいと思います。エンドツーエンドの自動運転システムをどのように定義するか、またエンドツーエンドで解決することが期待される問題は何でしょうか?最も伝統的な定義によれば、エンドツーエンド システムとは、センサーから生の情報を入力し、関心のある変数をタスクに直接出力するシステムを指します。たとえば、画像認識では、従来の特徴抽出 + 分類子方式と比較して、CNN はエンドツーエンドと言えます。自動運転タスクでは、各種センサー(カメラ/LiDAR)からのデータを入力
 FisheyeDetNet: 魚眼カメラに基づいた最初のターゲット検出アルゴリズム
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: 魚眼カメラに基づいた最初のターゲット検出アルゴリズム
Apr 26, 2024 am 11:37 AM
目標検出は自動運転システムにおいて比較的成熟した問題であり、その中でも歩行者検出は最も初期に導入されたアルゴリズムの 1 つです。ほとんどの論文では非常に包括的な研究が行われています。ただし、サラウンドビューに魚眼カメラを使用した距離認識については、あまり研究されていません。放射状の歪みが大きいため、標準のバウンディング ボックス表現を魚眼カメラに実装するのは困難です。上記の説明を軽減するために、拡張バウンディング ボックス、楕円、および一般的な多角形の設計を極/角度表現に探索し、これらの表現を分析するためのインスタンス セグメンテーション mIOU メトリックを定義します。提案された多角形モデルの FisheyeDetNet は、他のモデルよりも優れたパフォーマンスを示し、同時に自動運転用の Valeo 魚眼カメラ データセットで 49.5% の mAP を達成しました。
