

Python では、OpenCV ライブラリのメソッドを使用して画像をセグメント化して抽出できます。

画像の分割と抽出
画像内の前景オブジェクトをターゲット画像として分割または抽出します。背景自体には興味がなく、分水界アルゴリズムと GrabCut アルゴリズムによって画像がセグメント化されて抽出されます。
ウォーターシェッド アルゴリズムを使用して画像のセグメンテーションと抽出を実現する
ウォーターシェッド アルゴリズムは、画像を地理的地形の表面と鮮明に比較して画像のセグメンテーションを実現します。このアルゴリズムは非常に効果的です。
アルゴリズム原理
任意のグレースケール画像を地理的地形表面とみなすことができます。グレースケール値が高い領域は山頂とみなすことができます。グレースケール値が低い領域は、谷として考えられています。
左の画像は元の画像、右の画像はそれに対応する「地形面」です。
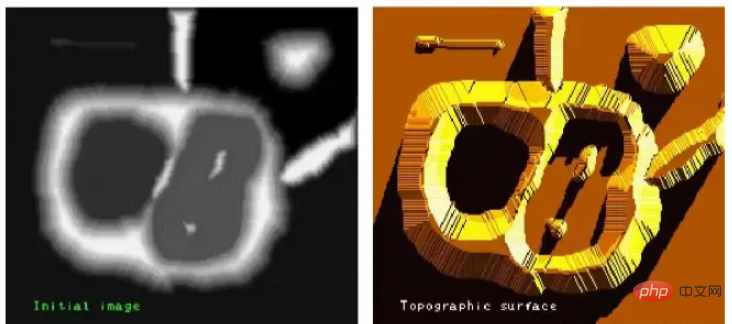
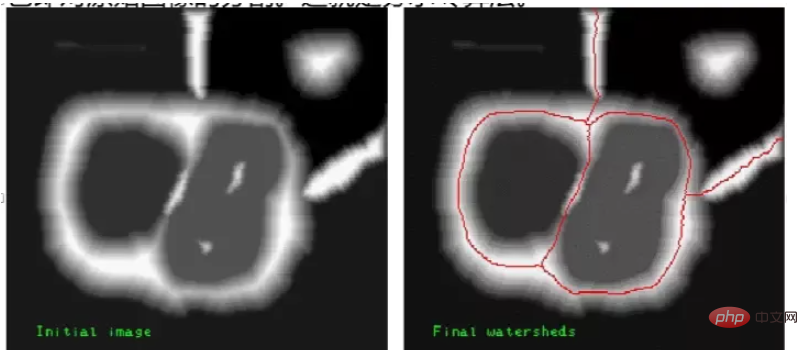
このプロセスでは、画像が集水域と流域線という 2 つの異なるセットに分割されます。私たちが建設したダムは分水嶺であり、元の画像を分割したものです。これが分水界アルゴリズムです。
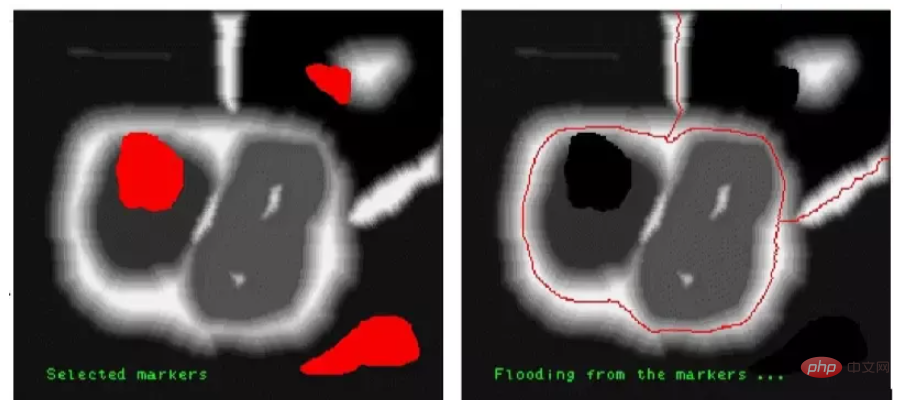
ノイズやその他の要因の影響により、上記の基本的な分水界アルゴリズムではオーバーセグメンテーションが発生することがよくあります。過度にセグメンテーションすると、画像が密な独立した小さなブロックに分割され、セグメンテーションが無意味になってしまいます。画像セグメンテーション効果を改善するために、改良されたマスクベースの流域アルゴリズムが提案されました。改良された分水界アルゴリズムにより、ユーザーは同じセグメント化された領域であると思われる部分にラベルを付けることができます (ラベル付けされた部分はマスクと呼ばれます)。流域アルゴリズムが処理されると、マークされた部分は同じセグメント化された領域に処理されます。
例:
元の画像がマークされて処理され、暗い色としてマークされた 3 つの小さなカラー ブロックが表示されます。マスク ウォーターシェッド アルゴリズム を使用する場合、色はこれらの部分に含まれる要素は同じ領域に分割されます。
関連関数の紹介
OpenCV では、関数 cv2.watershed() を使用してウォーターシェッド アルゴリズムを実装できます。
特定の実装プロセスでは、形態学的関数、距離変換関数 cv2. distanceTransform()、および cv2.connectedComponents() を使用して画像のセグメンテーションを完了する必要があります。
形態学的関数
分水嶺アルゴリズムを使用して画像をセグメント化する前に、画像に単純な形態学的処理を施す必要があります。
オープニング操作
オープニング操作は、腐食してから膨張する操作です。オープニング操作により画像のノイズを除去できます。
で処理中Watershed アルゴリズム 画像処理の前に、画像セグメンテーションに対するノイズによって引き起こされる可能性のある干渉を避けるために、オープニング操作を使用して画像内のノイズを除去する必要があります。画像の境界を取得する
画像の境界は、形態演算と減算演算によって取得できます。
モルフォロジー変換を使用して画像の境界情報を取得します
import cv2
import numpy as np
import matplotlib.pyplot as plt
o=cv2.imread("my.bmp", cv2.IMREAD_UNCHANGED)
k=np.ones((5,5), np.uint8)
e=cv2.erode(o, k)
b=cv2.subtract(o, e)
plt.subplot(131)
plt.imshow(o)
plt.axis('off')
plt.subplot(132)
plt.imshow(e)
plt.axis('off')
plt.subplot(133)
plt.imshow(b)
plt.axis('off')
plt.show()モルフォロジー演算と減算演算を使用して画像の境界情報を取得します。ただし、形態学的操作は比較的単純な画像にのみ適しています。画像の前景オブジェクトが接続されている場合、形態学的演算を使用して各サブ画像の境界を正確に取得することはできません。
距離変換関数 distanceTransform
画像内のサブ画像が接続されていない場合、形態侵食操作を直接使用して前景オブジェクトを決定できますが、サブ画像が接続されていない場合、画像内の画像がつながっている 複数の画像が一緒にあると、前景のオブジェクトを特定するのが難しくなります。
このとき、距離変換関数 cv2. distanceTransform() を使用すると、前景のオブジェクトを簡単に抽出できます。
関数 cv2. distanceTransform() は、バイナリ イメージ内の任意の点から最も近い背景点までの距離を計算します。
一般に、この関数は、イメージ内の非ゼロ値ピクセルから最も近いゼロ値ピクセルまでの距離を計算します。つまり、バイナリ イメージ内のすべてのピクセルと、次の値を持つ最も近いピクセルの間の距離を計算します。 0. .
ピクセル自体の値が 0 の場合、距離も 0 になります。
cv2. distanceTransform() の計算結果は、各ピクセルと背景 (値 0 のピクセル点) との間の距離関係を反映します。
通常:
前景オブジェクトの中心 (重心) が 0 ピクセルの距離にある場合、遠くに行くほど、値は大きくなります。
前景オブジェクトのエッジが値 0 のピクセルに近い場合、より小さな値が取得されます。
上記の計算結果を閾値処理すると、画像内のサブ画像の中心や骨格などの情報が得られます。距離変換関数 cv2. distanceTransform() を使用すると、オブジェクトの中心を計算でき、輪郭を調整したり、画像の前景を取得したりすることもできます。
関数 cv2 の構文形式. distanceTransform() は次のとおりです。
dst=cv2.distanceTransform(src, distanceType, maskSize[, dstType]])
src は 8 ビットのシングル チャネル バイナリ イメージです。
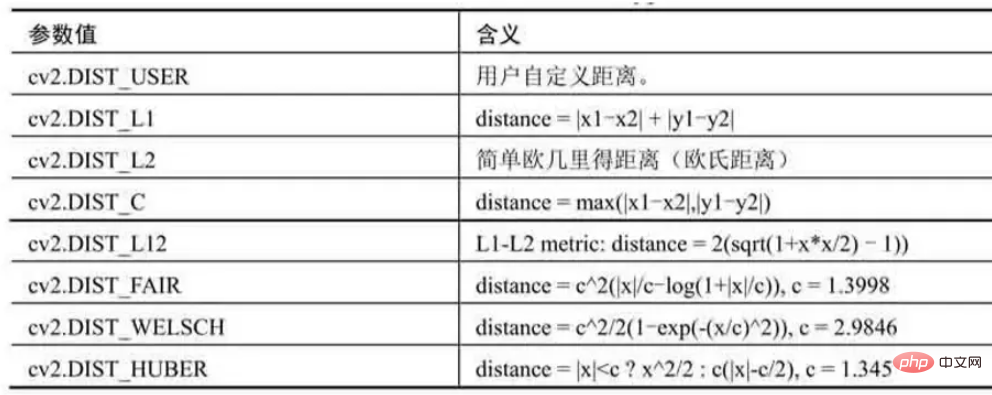
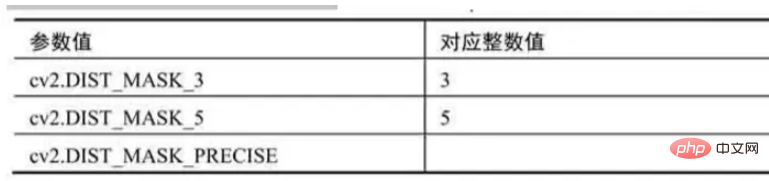
distanceType は距離タイプのパラメータです。
maskSize为掩模的尺寸
distanceType=cv2.DIST_L1或cv2.DIST_C时,maskSize强制为3(因为设置为3和设置为5及更大值没有什么区别)。
dstType为目标图像的类型,默认值为CV_32F。
dst表示计算得到的目标图像,可以是8位或32位浮点数,尺寸和src相同。
使用距离变换函数cv2.distanceTransform(),计算一幅图像的确定前景
import numpy as np import cv2 import matplotlib.pyplot as plt img = cv2.imread('water_coins.jpg') gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) img=cv2.cvtColor(img, cv2.COLOR_BGR2RGB) ishow=img.copy() ret, thresh = cv2.threshold(gray,0,255,cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU) kernel = np.ones((3,3), np.uint8) opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations = 2) # 进行开运算 dist_transform = cv2.distanceTransform(opening, cv2.DIST_L2,5) ret, fore = cv2.threshold(dist_transform,0.7*dist_transform.max(),255,0) plt.subplot(131) plt.imshow(ishow) plt.axis('off') plt.subplot(132) plt.imshow(dist_transform) plt.axis('off') plt.subplot(133) plt.imshow(fore) plt.axis('off') plt.show()
fore图像中: 比较准确地显示出左图内的“确定前景”。确定前景,通常是指前景对象的中心。之所以认为这些点是确定前景,是因为它们距离背景点的距离足够远,都是距离大于足够大的固定阈值(0.7*dist_transform.max())的点。
确定未知区域
使用形态学的膨胀操作能够将图像内的前景“膨胀放大”。
当图像内的前景被放大后,背景就会被“压缩”,所以此时得到的背景信息一定小于实际背景的,不包含前景的“确定背景”。
为了方便说明将确定背景称为B。
距离变换函数cv2.distanceTransform()能够获取图像的“中心”,得到“确定前景”。
图像中有了确定前景F和确定背景B,剩下区域的就是未知区域UN了。这部分区域正是分水岭算法要进一步明确的区域。
针对一幅图像O,通过以下关系能够得到未知区域UN:未知区域UN=图像O-确定背景B-确定前景F
未知区域UN=(图像O-确定背景B)- 确定前景F
“图像O-确定背景B”,可以通过对图像进行形态学的膨胀操作得到。
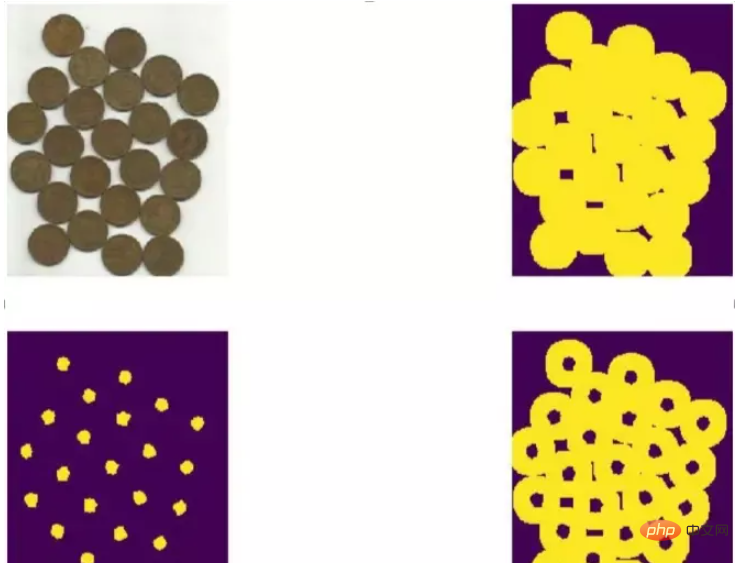
标注一幅图像的确定前景、确定背景及未知区域。
import numpy as np import cv2 import matplotlib.pyplot as plt img = cv2.imread('water_coins.jpg') gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) img=cv2.cvtColor(img, cv2.COLOR_BGR2RGB) ishow=img.copy() ret, thresh = cv2.threshold(gray,0,255,cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU) kernel = np.ones((3,3), np.uint8) opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations = 2) bg = cv2.dilate(opening, kernel, iterations=3) dist = cv2.distanceTransform(opening, cv2.DIST_L2,5) ret, fore = cv2.threshold(dist,0.7*dist.max(),255,0) fore = np.uint8(fore) un = cv2.subtract(bg, fore) plt.subplot(221) plt.imshow(ishow) plt.axis('off') plt.subplot(222) plt.imshow(bg) plt.axis('off') plt.subplot(223) plt.imshow(fore) plt.axis('off') plt.subplot(224) plt.imshow(un) plt.axis('off') plt.show()
函数connectedComponents
明确了确定前景后,就可以对确定前景图像进行标注了。
在OpenCV中,可以使用函数cv2.connectedComponents()进行标注。该函数会将背景标注为0,将其他的对象使用从1开始的正整数标注。
函数cv2.connectedComponents()的语法格式为:
retval, labels = cv2.connectedComponents( image )
image为8位单通道的待标注图像。
retval为返回的标注的数量。
labels为标注的结果图像。
使用函数cv2.connectedComponents()标注一幅图像
import numpy as np import cv2 import matplotlib.pyplot as plt img = cv2.imread('water_coins.jpg') gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) img=cv2.cvtColor(img, cv2.COLOR_BGR2RGB) ishow=img.copy() ret, thresh = cv2.threshold(gray,0,255,cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU) kernel = np.ones((3,3), np.uint8) opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations = 2) sure_bg = cv2.dilate(opening, kernel, iterations=3) dist_transform = cv2.distanceTransform(opening, cv2.DIST_L2,5) ret, fore = cv2.threshold(dist_transform,0.7*dist_transform.max(),255,0) fore = np.uint8(fore) ret, markers = cv2.connectedComponents(fore) print(ret) plt.subplot(131) plt.imshow(ishow) plt.axis('off') plt.subplot(132) plt.imshow(fore) plt.axis('off') plt.subplot(133) plt.imshow(markers) plt.axis('off') plt.show()
前景图像的中心点被做了不同的标注(用不同颜色区分)
函数cv2.connectedComponents()在标注图像时,会将背景标注为0,将其他的对象用从1开始的正整数标注。具体的对应关系为:
数值0代表背景区域。
从数值1开始的值,代表不同的前景区域。
在分水岭算法中,标注值0代表未知区域。所以,我们要对函数cv2.connectedComponents()标注的结果进行调整:将标注的结果都加上数值1。经过上述处理后,在标注结果中:
数值1代表背景区域。
从数值2开始的值,代表不同的前景区域。
为了能够使用分水岭算法,还需要对原始图像内的未知区域进行标注,将已经计算出来的未知区域标注为0即可。
关键代码:
ret, markers = cv2.connectedComponents(fore) markers = markers+1 markers[未知区域] = 0
使用函数cv2.connectedComponents()标注一幅图像,并对其进行修正,使未知区域被标注为0
import numpy as np import cv2 import matplotlib.pyplot as plt img = cv2.imread('water_coins.jpg') gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) img=cv2.cvtColor(img, cv2.COLOR_BGR2RGB) ishow=img.copy() ret, thresh = cv2.threshold(gray,0,255,cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU) kernel = np.ones((3,3), np.uint8) opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations = 2) sure_bg = cv2.dilate(opening, kernel, iterations=3) dist_transform = cv2.distanceTransform(opening, cv2.DIST_L2,5) ret, fore = cv2.threshold(dist_transform,0.7*dist_transform.max(),255,0) fore = np.uint8(fore) ret, markers1 = cv2.connectedComponents(fore) foreAdv=fore.copy() unknown = cv2.subtract(sure_bg, foreAdv) ret, markers2 = cv2.connectedComponents(foreAdv) markers2 = markers2+1 markers2[unknown==255] = 0 plt.subplot(121) plt.imshow(markers1) plt.axis('off') plt.subplot(122) plt.imshow(markers2) plt.axis('off') plt.show()
前景都有一个黑色的边缘,这个边缘是被标注的未知区域。
函数cv2.watershed()
完成上述处理后,就可以使用分水岭算法对预处理结果图像进行分割了。
在OpenCV中,实现分水岭算法的函数是cv2.watershed(),其语法格式为:
markers = cv2.watershed( image, markers )
image是输入图像,必须是8位三通道的图像。在对图像使用
cv2.watershed()函数处理之前,必须先用正数大致勾画出图像中的期望分割区域。每一个分割的区域会被标注为1、2、3等。对于尚未确定的区域,需要将它们标注为0。我们可以将标注区域理解为进行分水岭算法分割的“种子”区域。
markers是32位单通道的标注结果,它应该和image具有相等大小。在markers中,每一个像素要么被设置为初期的“种子值”,要么被设置为**“-1”表示边界**。
分水岭算法图像分割实例
使用分水岭算法进行图像分割时,基本的步骤为:
通过形态学开运算对原始图像O去噪。
通过腐蚀操作获取“确定背景B”。
需要注意,这里得到“原始图像-确定背景”即可。利用距离变换函数cv2.distanceTransform()对原始图像进行运算,并对其进行阈值处理,得到“确定前景F”。
计算未知区域UN(UN=O -B - F)
利用函数cv2.connectedComponents()对原始图像O进行标注。
对函数cv2.connectedComponents()的标注结果进行修正。
使用分水岭函数完成对图像的分割。
使用分水岭算法对一幅图像进行分割:
import numpy as np import cv2 import matplotlib.pyplot as plt img = cv2.imread('water_coins.jpg') gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) img=cv2.cvtColor(img, cv2.COLOR_BGR2RGB) ishow=img.copy() ret, thresh = cv2.threshold(gray,0,255,cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU) kernel = np.ones((3,3), np.uint8) opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations = 2) sure_bg = cv2.dilate(opening, kernel, iterations=3) dist_transform = cv2.distanceTransform(opening, cv2.DIST_L2,5) ret, sure_fg = cv2.threshold(dist_transform,0.7*dist_transform.max(),255,0) sure_fg = np.uint8(sure_fg) unknown = cv2.subtract(sure_bg, sure_fg) ret, markers = cv2.connectedComponents(sure_fg) markers = markers+1 markers[unknown==255] = 0 markers = cv2.watershed(img, markers) img[markers == -1] = [0,255,0] # 边界 plt.subplot(121) plt.imshow(ishow) plt.axis('off') plt.subplot(122) plt.imshow(img) plt.axis('off') plt.show()
交互式前景提取
经典的前景提取技术主要使用纹理(颜色)信息,如魔术棒工具,或根据边缘(对比度)信息,如智能剪刀等。在开始提取前景时,先用一个矩形框指定前景区域所在的大致位置范围,然后不断迭代地分割,直到达到最好的效果。经过上述处理后,提取前景的效果可能并不理想,存在前景没有提取出来,或者将背景提取为前景的情况,此时需要用户干预提取过程。
用户在原始图像的副本中(也可以是与原始图像大小相等的任意一幅图像),用白色标注要提取为前景的区域,用黑色标注要作为背景的区域。然后,将标注后的图像作为掩模,让算法继续迭代提取前景从而得到最终结果。
GrabCut算法的具体实施过程。
将前景所在的大致位置使用矩形框标注出来。
此时矩形框框出的仅仅是前景的大致位置,其中既包含前景又包含背景,所以该区域实际上是未确定区域。但是,该区域以外的区域被认为是“确定背景”。
根据矩形框外部的“确定背景”数据来区分矩形框区域内的前景和背景。
用高斯混合模型(Gaussians Mixture Model, GMM)对前景和背景建模。
GMM会根据用户的输入 学习并创建新的像素分布。对未分类的像素(可能是背景也可能是前景),根据其与已知分类像素(前景和背景)的关系进行分类。
根据像素分布情况生成一幅图,图中的节点就是各个像素点。
除了像素点之外,还有两个节点:前景节点和背景节点。所有的前景像素都和前景节点相连,所有的背景像素都和背景节点相连。每个像素连接到前景节点或背景节点的边的权重由像素是前景或背景的概率来决定。
图中的每个像素除了与前景节点或背景节点相连外,彼此之间还存在着连接。两个像素连接的边的权重值由它们的相似性决定,两个像素的颜色越接近,边的权重值越大。
完成节点连接后,需要解决的问题变成了一幅连通的图。在该图上根据各自边的权重关系进行切割,将不同的点划分为前景节点和背景节点。
不断重复上述过程,直至分类收敛为止。
在OpenCV中,实现交互式前景提取的函数是cv2.grabCut(),其语法格式为:
mask, bgdModel, fgdModel =cv2.grabCut(img, mask, rect, bgdModel, fgdModel, iterCount[, mode] )
img为输入图像,要求是8位3通道的。
mask为掩模图像,要求是8位单通道的。该参数用于确定前景区域、背景区域和不确定区域,可以设置为4种形式。
cv2.GC_BGD:表示确定背景,也可以用数值0表示。
cv2.GC_FGD:表示确定前景,也可以用数值1表示。
cv2.GC_PR_BGD:表示可能的背景,也可以用数值2表示。
cv2.GC_PR_FGD:表示可能的前景,也可以用数值3表示。
在最后使用模板提取前景时,会将参数值0和2合并为背景(均当作0处理),将参数值1和3合并为前景(均当作1处理)。
在通常情况下,我们可以使用白色笔刷和黑色笔刷在掩模图像上做标记,再通过转换将其中的白色像素设置为0,黑色像素设置为1。
rect指包含前景对象的区域,该区域外的部分被认为是“确定背景”。因此,在选取时务必确保让前景包含在rect指定的范围内;否则,rect外的前景部分是不会被提取出来的。
只有当参数mode的值被设置为矩形模式cv2.GC_INIT_WITH_RECT时,参数rect才有意义。
其格式为(x, y, w, h),分别表示区域左上角像素的x轴和y轴坐标以及区域的宽度和高度。
如果前景位于右下方,又不想判断原始图像的大小,对于w 和h可以直接用一个很大的值。
使用掩模模式时,将该值设置为none即可。
bgdModel为算法内部使用的数组,只需要创建大小为(1, 65)的numpy.float64数组。
fgdModel为算法内部使用的数组,只需要创建大小为(1, 65)的numpy.float64数组。
iterCount表示迭代的次数。
mode表示迭代模式。其可能的值与含义如下:
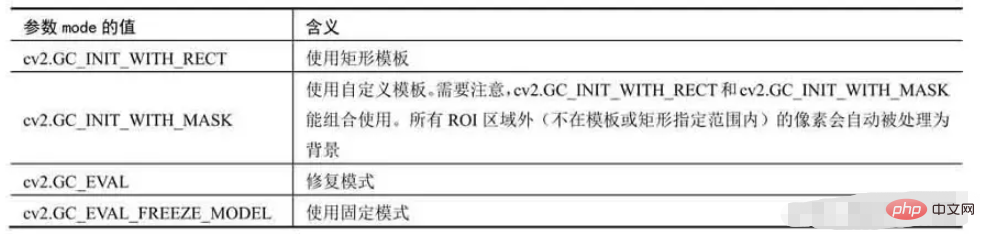
RECT 和MASK可以组合使用( 并的关系 )
使用GrabCut算法提取图像的前景
import numpy as np import cv2 import matplotlib.pyplot as plt o = cv2.imread('lenacolor.png') orgb=cv2.cvtColor(o, cv2.COLOR_BGR2RGB) mask = np.zeros(o.shape[:2], np.uint8) bgdModel = np.zeros((1,65), np.float64) fgdModel = np.zeros((1,65), np.float64) rect = (50,50,400,500) cv2.grabCut(o, mask, rect, bgdModel, fgdModel,5, cv2.GC_INIT_WITH_RECT) mask2 = np.where((mask==2)|(mask==0),0,1).astype('uint8') ogc = o*mask2[:, :, np.newaxis] ogc=cv2.cvtColor(ogc, cv2.COLOR_BGR2RGB) plt.subplot(121) plt.imshow(orgb) plt.axis('off') plt.subplot(122) plt.imshow(ogc) plt.axis('off') plt.show()
为了得到完整的前景对象,需要做一些改进。
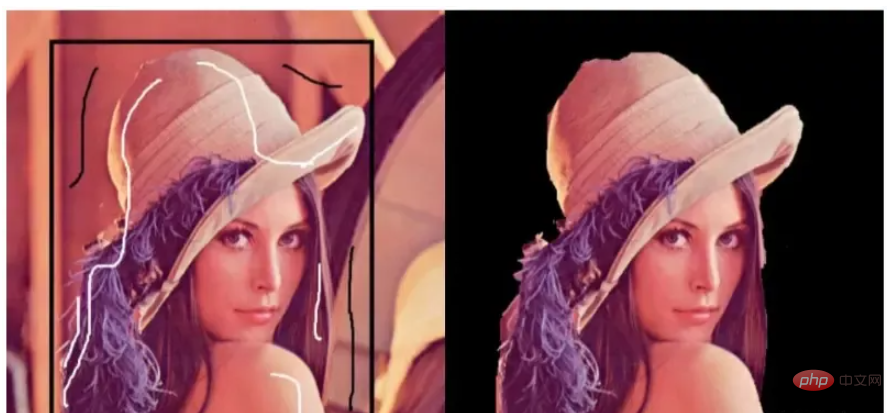
这里对原始图像进行标注,将需要保留的部分设置为白色,将需要删除的背景设置为黑色。以标记好的图像作为模板,使用函数cv2.grabCut()完成前景的提取。
这个过程主要包含以下步骤:
利用函数cv2.grabCut()在cv2.GC_INIT_WITH_RECT 模式下对图像进行初步的前景提取,得到初步提取的结果图像og。
使用Windows系统自带的笔刷工具,打开要提取前景的图像,比如lena。
使用白色笔刷在希望提取的前景区域做标记。
使用黑色笔刷在希望删除的背景区域做标记。
将当前设置好的lena图像另存为模板图像m0。
将模板图像m0中的白色值和黑色值映射到模板m中。将模板图像m0中的白色值(像素值为255)映射为模板图像m中的确定前景(像素值为1),将模板图像m0中的黑色值(像素值为0)映射为模板图像m中的确定背景(像素值为0)。
以模板图像m作为函数cv2.grabCut()的模板参数(mask),对图像og完成前景提取。
使用画笔标记的模板图像m0不能直接作为模板(即参数mask)使用
函数cv2.grabCut()要求,参数mask的值必须是cv2.GC_BGD(确定背景)、cv2.GC_FGD(确定前景)、cv2.GC_PR_BGD(可能的背景)、cv2.GC_PR_FGD(可能的前景),或者是0、1、2、3之中的值。
必须先将模板图像m0中的白色值和黑色值映射到模板m上,再将模板图像m作为函数cv2.grabCut()的模板参数。
在GrabCut算法中使用模板提取图像的前景:
import numpy as np import cv2 import matplotlib.pyplot as plt o= cv2.imread('lenacolor.png') orgb=cv2.cvtColor(o, cv2.COLOR_BGR2RGB) mask = np.zeros(o.shape[:2], np.uint8) bgd = np.zeros((1,65), np.float64) fgd = np.zeros((1,65), np.float64) rect = (50,50,400,500) cv2.grabCut(o, mask, rect, bgd, fgd,5, cv2.GC_INIT_WITH_RECT) mask2 = cv2.imread('mask.png',0) mask2Show = cv2.imread('mask.png', -1) m2rgb=cv2.cvtColor(mask2Show, cv2.COLOR_BGR2RGB) mask[mask2 == 0] = 0 mask[mask2 == 255] = 1 mask, bgd, fgd = cv2.grabCut(o, mask, None, bgd, fgd,5, cv2.GC_INIT_WITH_MASK) mask = np.where((mask==2)|(mask==0),0,1).astype('uint8') ogc = o*mask[:, :, np.newaxis] ogc=cv2.cvtColor(ogc, cv2.COLOR_BGR2RGB) plt.subplot(121) plt.imshow(m2rgb) plt.axis('off') plt.subplot(122) plt.imshow(ogc) plt.axis('off') plt.show()
在函数cv2.grabCut()的实际使用中,也可以不使用矩形初始化,直接使用模板模式。构造一个模板图像,其中:
使用像素值0标注确定背景。
使用像素值1标注确定前景。
使用像素值2标注可能的背景。
使用像素值3标注可能的前景。
构造完模板后,直接将该模板用于函数cv2.grabCut()处理原始图像,即可完成前景的提取。
一般情况下,自定义模板的步骤为:
先使用numpy.zeros构造一个内部像素值都是0(表示确定背景)的图像mask,以便在后续步骤中逐步对该模板图像进行细化。
.使用mask[30:512, 50:400]=3,将模板图像中第30行到第512行,第50列到400列的区域划分为可能的前景(像素值为3,对应参数mask的含义为“可能的前景”)。
使用mask[50:300, 150:200]=1,将模板图像中第50行到第300行,第150列到第200列的区域划分为确定前景(像素值为1,对应参数mask的含义为“确定前景”)。
在GrabCut算法中直接使用自定义模板提取图像的前景
import numpy as np import cv2 import matplotlib.pyplot as plt o= cv2.imread('lenacolor.png') orgb=cv2.cvtColor(o, cv2.COLOR_BGR2RGB) bgd = np.zeros((1,65), np.float64) fgd = np.zeros((1,65), np.float64) mask2 = np.zeros(o.shape[:2], np.uint8) #先将掩模的值全部构造为0(确定背景),在后续步骤中,再根据需要修改其中的部分值 mask2[30:512,50:400]=3 #lena头像的可能区域 mask2[50:300,150:200]=1 #lena头像的确定区域,如果不设置这个区域,头像的提取不完整 cv2.grabCut(o, mask2, None, bgd, fgd,5, cv2.GC_INIT_WITH_MASK) mask2 = np.where((mask2==2)|(mask2==0),0,1).astype('uint8') ogc = o*mask2[:, :, np.newaxis] ogc=cv2.cvtColor(ogc, cv2.COLOR_BGR2RGB) plt.subplot(121) plt.imshow(orgb) plt.axis('off') plt.subplot(122) plt.imshow(ogc) plt.axis('off') plt.show()
对于不同的图像,要构造不同的模板来划分它们的确定前景、确定背景、可能的前景与可能的背景。
以上がPython では、OpenCV ライブラリのメソッドを使用して画像をセグメント化して抽出できます。の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7478
7478
 15
1377
52
77
11
19
33
15
1377
52
77
11
19
33

 mysqlは支払う必要がありますか
Apr 08, 2025 pm 05:36 PM
mysqlは支払う必要がありますか
Apr 08, 2025 pm 05:36 PM
MySQLには、無料のコミュニティバージョンと有料エンタープライズバージョンがあります。コミュニティバージョンは無料で使用および変更できますが、サポートは制限されており、安定性要件が低く、技術的な能力が強いアプリケーションに適しています。 Enterprise Editionは、安定した信頼性の高い高性能データベースを必要とするアプリケーションに対する包括的な商業サポートを提供し、サポートの支払いを喜んでいます。バージョンを選択する際に考慮される要因には、アプリケーションの重要性、予算編成、技術スキルが含まれます。完璧なオプションはなく、最も適切なオプションのみであり、特定の状況に応じて慎重に選択する必要があります。
 インストール後にMySQLの使用方法
Apr 08, 2025 am 11:48 AM
インストール後にMySQLの使用方法
Apr 08, 2025 am 11:48 AM
この記事では、MySQLデータベースの操作を紹介します。まず、MySQLWorkBenchやコマンドラインクライアントなど、MySQLクライアントをインストールする必要があります。 1. mysql-uroot-pコマンドを使用してサーバーに接続し、ルートアカウントパスワードでログインします。 2。CreatedAtaBaseを使用してデータベースを作成し、データベースを選択します。 3. createTableを使用してテーブルを作成し、フィールドとデータ型を定義します。 4. INSERTINTOを使用してデータを挿入し、データをクエリし、更新することでデータを更新し、削除してデータを削除します。これらの手順を習得することによってのみ、一般的な問題に対処することを学び、データベースのパフォーマンスを最適化することでMySQLを効率的に使用できます。
 MySQLはダウンロード後にインストールできません
Apr 08, 2025 am 11:24 AM
MySQLはダウンロード後にインストールできません
Apr 08, 2025 am 11:24 AM
MySQLのインストール障害の主な理由は次のとおりです。1。許可の問題、管理者として実行するか、SUDOコマンドを使用する必要があります。 2。依存関係が欠落しており、関連する開発パッケージをインストールする必要があります。 3.ポート競合では、ポート3306を占めるプログラムを閉じるか、構成ファイルを変更する必要があります。 4.インストールパッケージが破損しているため、整合性をダウンロードして検証する必要があります。 5.環境変数は誤って構成されており、環境変数はオペレーティングシステムに従って正しく構成する必要があります。これらの問題を解決し、各ステップを慎重に確認して、MySQLを正常にインストールします。
 MySQLダウンロードファイルが破損しており、インストールできません。修復ソリューション
Apr 08, 2025 am 11:21 AM
MySQLダウンロードファイルが破損しており、インストールできません。修復ソリューション
Apr 08, 2025 am 11:21 AM
mysqlダウンロードファイルは破損していますが、どうすればよいですか?残念ながら、MySQLをダウンロードすると、ファイルの破損に遭遇できます。最近は本当に簡単ではありません!この記事では、誰もが迂回を避けることができるように、この問題を解決する方法について説明します。それを読んだ後、損傷したMySQLインストールパッケージを修復するだけでなく、将来の行き詰まりを避けるために、ダウンロードとインストールプロセスをより深く理解することもできます。最初に、ファイルのダウンロードが破損した理由について話しましょう。これには多くの理由があります。ネットワークの問題は犯人です。ダウンロードプロセスの中断とネットワーク内の不安定性は、ファイル腐敗につながる可能性があります。ダウンロードソース自体にも問題があります。サーバーファイル自体が壊れており、もちろんダウンロードすると壊れています。さらに、いくつかのウイルス対策ソフトウェアの過度の「情熱的な」スキャンもファイルの破損を引き起こす可能性があります。診断問題:ファイルが本当に破損しているかどうかを判断します
 高負荷アプリケーションのMySQLパフォーマンスを最適化する方法は?
Apr 08, 2025 pm 06:03 PM
高負荷アプリケーションのMySQLパフォーマンスを最適化する方法は?
Apr 08, 2025 pm 06:03 PM
MySQLデータベースパフォーマンス最適化ガイドリソース集約型アプリケーションでは、MySQLデータベースが重要な役割を果たし、大規模なトランザクションの管理を担当しています。ただし、アプリケーションのスケールが拡大すると、データベースパフォーマンスのボトルネックが制約になることがよくあります。この記事では、一連の効果的なMySQLパフォーマンス最適化戦略を検討して、アプリケーションが高負荷の下で効率的で応答性の高いままであることを保証します。実際のケースを組み合わせて、インデックス作成、クエリ最適化、データベース設計、キャッシュなどの詳細な主要なテクノロジーを説明します。 1.データベースアーキテクチャの設計と最適化されたデータベースアーキテクチャは、MySQLパフォーマンスの最適化の基礎です。いくつかのコア原則は次のとおりです。適切なデータ型を選択し、ニーズを満たす最小のデータ型を選択すると、ストレージスペースを節約するだけでなく、データ処理速度を向上させることもできます。
 mysqlはインターネットが必要ですか?
Apr 08, 2025 pm 02:18 PM
mysqlはインターネットが必要ですか?
Apr 08, 2025 pm 02:18 PM
MySQLは、基本的なデータストレージと管理のためにネットワーク接続なしで実行できます。ただし、他のシステムとのやり取り、リモートアクセス、または複製やクラスタリングなどの高度な機能を使用するには、ネットワーク接続が必要です。さらに、セキュリティ対策(ファイアウォールなど)、パフォーマンスの最適化(適切なネットワーク接続を選択)、およびデータバックアップは、インターネットに接続するために重要です。
 MySQLインストール後に開始できないサービスのソリューション
Apr 08, 2025 am 11:18 AM
MySQLインストール後に開始できないサービスのソリューション
Apr 08, 2025 am 11:18 AM
MySQLは開始を拒否しましたか?パニックにならないでください、チェックしてみましょう!多くの友人は、MySQLのインストール後にサービスを開始できないことを発見し、彼らはとても不安でした!心配しないでください、この記事はあなたがそれを落ち着いて対処し、その背後にある首謀者を見つけるためにあなたを連れて行きます!それを読んだ後、あなたはこの問題を解決するだけでなく、MySQLサービスの理解と問題のトラブルシューティングのためのあなたのアイデアを改善し、より強力なデータベース管理者になることができます! MySQLサービスは開始に失敗し、単純な構成エラーから複雑なシステムの問題に至るまで、多くの理由があります。最も一般的な側面から始めましょう。基本知識:サービススタートアッププロセスMYSQLサービススタートアップの簡単な説明。簡単に言えば、オペレーティングシステムはMySQL関連のファイルをロードし、MySQLデーモンを起動します。これには構成が含まれます
 MySQLインストール後にデータベースのパフォーマンスを最適化する方法
Apr 08, 2025 am 11:36 AM
MySQLインストール後にデータベースのパフォーマンスを最適化する方法
Apr 08, 2025 am 11:36 AM
MySQLパフォーマンスの最適化は、インストール構成、インデックス作成、クエリの最適化、監視、チューニングの3つの側面から開始する必要があります。 1。インストール後、INNODB_BUFFER_POOL_SIZEパラメーターやclose query_cache_sizeなど、サーバーの構成に従ってmy.cnfファイルを調整する必要があります。 2。過度のインデックスを回避するための適切なインデックスを作成し、説明コマンドを使用して実行計画を分析するなど、クエリステートメントを最適化します。 3. MySQL独自の監視ツール(ShowProcessList、ShowStatus)を使用して、データベースの健康を監視し、定期的にデータベースをバックアップして整理します。これらの手順を継続的に最適化することによってのみ、MySQLデータベースのパフォーマンスを改善できます。
