

自動運転の主要な技術的困難を説明する記事

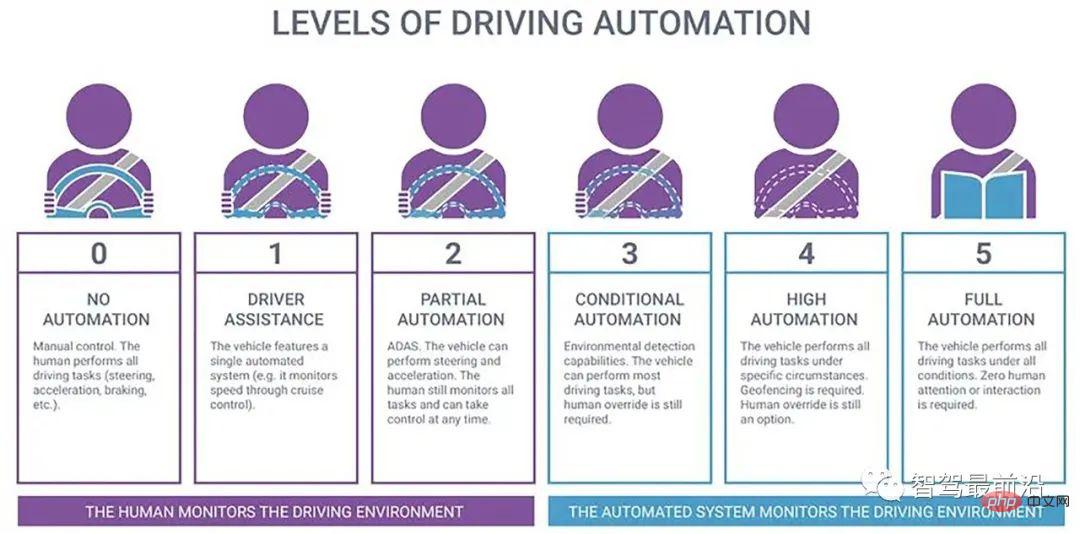
自動車技術者協会は、車両の知能の程度に基づいて自動運転を L0 ~ L5 の 6 つのレベルに分類しています。
-
L0 は自動化なし、 NA)、つまり従来の自動車では、ドライバーがステアリング、ブレーキ、加速、減速、駐車などのすべての操作タスクを実行します;
-
L1ドライビング・アシスタント (DA) は、ハンドルや加減速の 1 つの操作をサポートし、残りの操作はドライバーが行うなど、ドライバーに運転警告や運転支援を提供できます。
L2 は部分自動化 (PA) であり、ハンドル操作や加減速など複数の操作を車両が運転し、その他の運転操作はドライバーが担当します。 -
##L3 は条件付き自動化 (CA)、つまり、自動運転システムがほとんどの運転操作を完了し、ドライバーは緊急時に集中する必要があります;
-
L4 は高度自動化 (HA) です。すべての運転操作は車両によって完了します。ドライバーは集中する必要はありませんが、道路と環境条件は限られています。
-
L5 はフルオートメーション (FA) で、いかなる道路状況や環境条件下でも自動運転システムがすべての運転操作を完了し、ドライバーは集中する必要がありません。
#自動運転技術には多くのキー技術が含まれますが、本稿では主に環境認識技術、高精度測位技術、高精度測位技術について紹介します。意思決定と計画の技術と制御と実行の技術。
 01 環境認識技術
01 環境認識技術
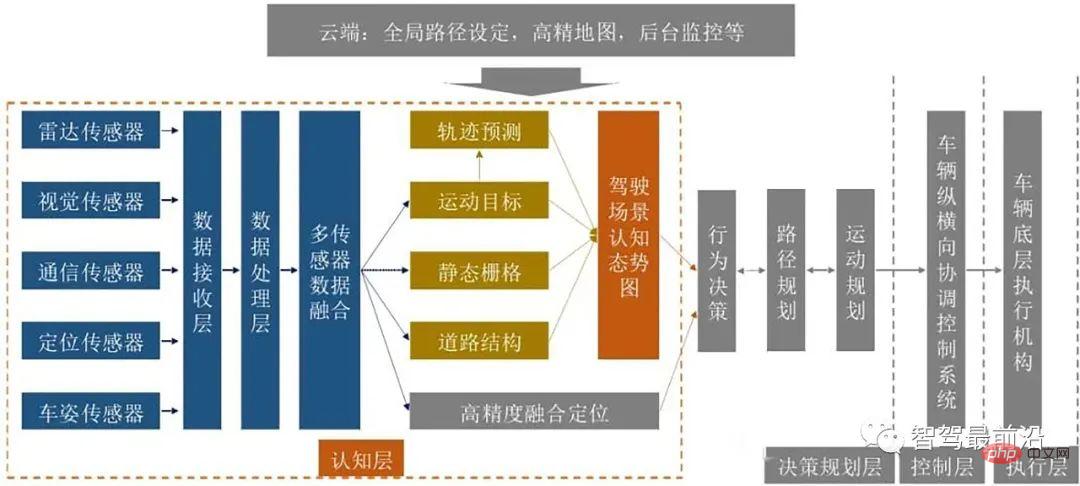
環境認識とは、障害物の種類、道路標識、標識などの環境を理解する能力を指します。走行車両の検知、交通情報の言語分類など。測位は認識結果の後処理であり、測位機能を通じて車両が環境に対する相対的な位置を理解するのに役立ちます。環境認識では、車両の周囲環境を正確に理解し、これに基づいて対応する計画と決定を行うために、センサーを通じて大量の周囲環境情報を取得する必要があります。
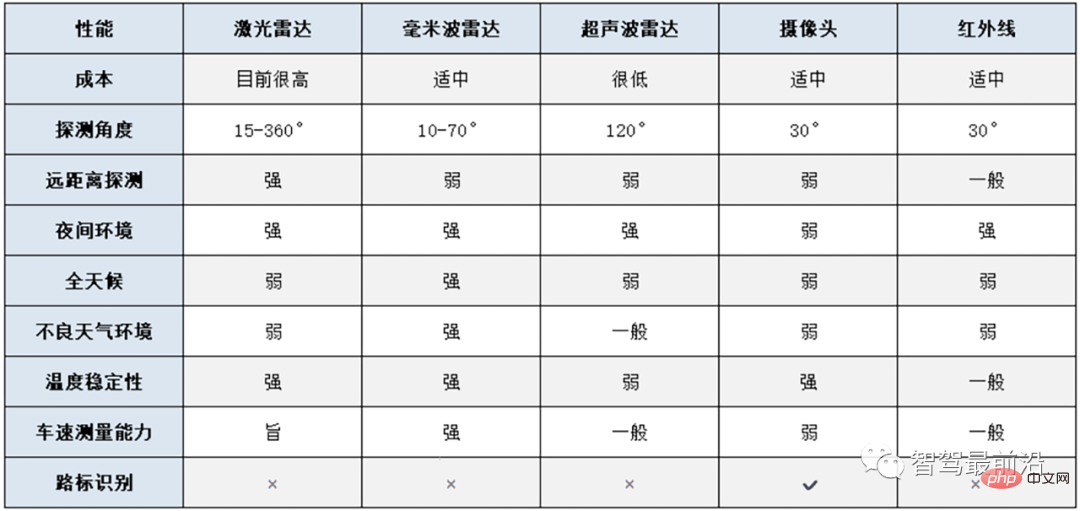
自動運転車で一般的に使用される環境認識センサーには、カメラ、ライダー、ミリ波レーダー、赤外線および超音波レーダーなどが含まれます。カメラは、自動運転車用の環境認識センサーとして最も一般的に使用され、最も単純で人間の目の撮像原理に最も近いものです。車両周囲の環境をリアルタイムに撮影し、撮影した画像をCV技術で解析することで、車両周囲の車両や歩行者の検知、標識認識などの機能を実現します。
このカメラの主な利点は、高解像度と低コストです。ただし、夜間、雨、雪、霧などの悪天候ではカメラの性能が急激に低下します。また、カメラの視距離は限られており、遠距離の観察は苦手です。
ミリ波レーダーは自動運転車にもよく使われるセンサーで、ミリ波レーダーとはミリ波帯(波長1~10mm、周波数領域30~300GHz)で動作するレーダーのことを指します。目標物体を検出する ToF テクノロジー (Time of Flight)。ミリ波レーダーは、ミリ波の信号を外部に送信し続け、物標から戻ってくる信号を受信し、信号の送信と受信の時間差から物標と車両との距離を測定します。したがって、ミリ波レーダーは主に、死角検出、障害物回避支援、駐車支援、アダプティブクルーズなど、車と周囲の物体との衝突を回避するために使用されます。ミリ波レーダーは強力な抗干渉能力を備えており、雨、砂、塵、煙、プラズマを透過する能力はレーザーや赤外線よりもはるかに強力で、全天候で動作します。しかし、信号の減衰が大きい、建物や人体などに遮られやすい、伝送距離が短い、解像度が低い、撮像が難しいなどの欠点もあります。
Lidar は、ToF テクノロジーを使用してターゲットの位置と距離を特定します。 LiDARは、レーザー光を照射して対象物を検出するため、検出精度や感度が高く、検出範囲も広いですが、空気中の雨、雪、霧などの影響を受けやすく、また、コストが高いため制限も受けます。その応用の主な理由。車載ライダーは、照射されるレーザー光の数に応じて、シングルライン、4ライン、8ライン、16ライン、64ラインライダーに分類できます。次の表 (表 1) を使用して、主流のセンサーの長所と短所を比較できます。
自動運転環境認識には、通常、「弱い知覚と超知能」と「強い知覚と強い知能」の 2 つの技術が使用されます。 「ルート。 「弱い知覚、超知能」技術は、主にカメラとディープラーニング技術に依存して環境知覚を実現し、ライダーには依存しません。この技術は、人間は両目で運転でき、車もカメラを利用して周囲の環境をはっきりと見ることができると考えています。超知能の実現が一時的に困難な場合、無人運転を実現するには知覚能力を高める必要があり、これがいわゆる「強い知覚と強い知能」の技術ルートとなります。
「弱い知覚と超知能」技術ルートと比較して、「強い知覚と強い知能」技術ルートの最大の特徴は、センサーとしてライダーを追加することで、知覚能力の向上。テスラは「弱い知能と超知能」の技術路線を採用しているが、グーグルウェイモ、百度アポロ、ウーバー、フォードモーターなどの人工知能企業、旅行会社、伝統的な自動車会社はいずれも「強い知覚と強い知能」の技術路線を採用している。
02 高精度測位技術
測位の目的は、外部環境に対する自動運転車の正確な位置を取得することです。自動運転車には必須の準備の基礎です。複雑な都市道路を走行する場合、測位精度は 10 cm 以内の誤差が必要です。たとえば、車両と交差点の間の距離を正確に把握することによってのみ、より正確な予測と準備を行うことができ、車両の位置を正確に把握することによってのみ、車両が位置する車線を決定することができます。測位誤差が大きいと、完全な交通事故につながる可能性があります。
GPS は現在最も広く使用されている測位方法であり、GPS の精度が高くなるほど、GPS センサーは高価になります。しかし、現在の商用 GPS 技術の測位精度は十分とは言えず、その精度はメートルレベルにすぎず、トンネルの障害物や信号遅延などの要因によって簡単に干渉されます。この問題を解決するために、クアルコムは、GNSS グローバル ナビゲーション、カメラ、IMU 慣性ナビゲーション、車輪速度センサーなどの複数の自動車コンポーネントからの情報を統合するビジョン強化高精度測位 (VEPP) テクノロジーを開発しました。車線まで正確なグローバルリアルタイム測位を実現するための融合。
03 意思決定および計画技術
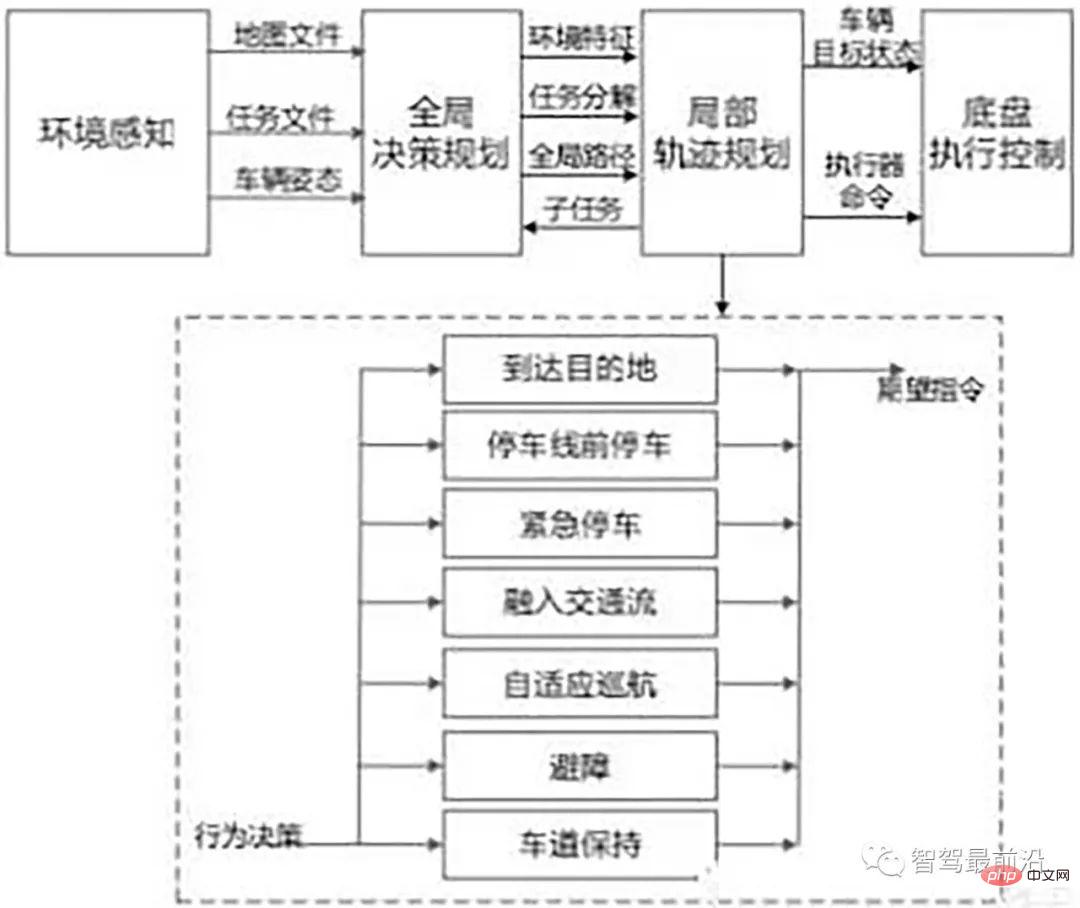
意思決定計画は自動運転の重要な部分の 1 つであり、まず複数のセンサー情報を融合します。そして、運転ニーズに基づいてタスクを決定し、既存の障害物を回避しながら、特定の制約に従って 2 点間の複数の安全な経路を計画し、これらの経路の中から最適なものを選択することができます。を計画中です。分割レベルにより、取得した地図情報を基に特定の条件下で衝突のない最適な経路を計画するグローバルプランニングとローカルプランニングの2種類に分けられます。例えば、上海から北京まではたくさんの道路がありますが、その一つをドライブルートとして計画することが全体の計画になります。
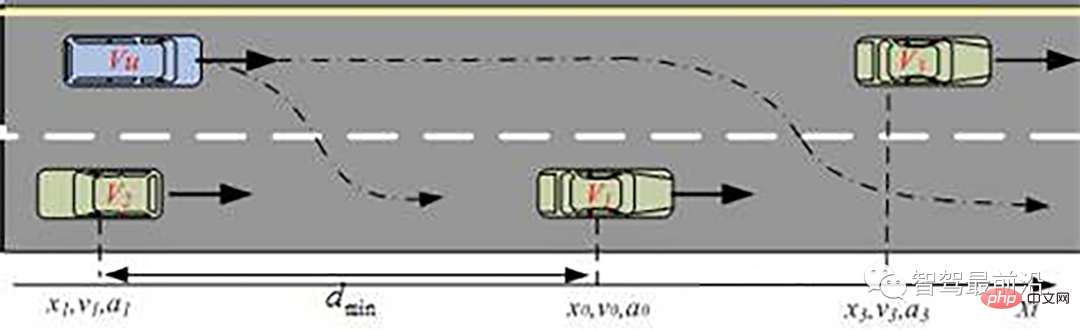
グリッド法、ビジュアルダイアグラム法、トポロジー法、自由空間法、ニューラルネットワーク法などの静的パス計画アルゴリズムローカルプランニングはグローバルプランニングに基づいており、ローカル環境情報に基づいて、未知の障害物との衝突を回避し、最終的に目標地点に到達するプロセスです。たとえば、グローバルに計画されている上海から北京までのルートには、他の車両や障害物が存在します。これらの障害物や車両を避けたい場合は、方向転換して車線を調整する必要があります。これがローカル パス プランニングです。ローカル パス プランニング方法には、人工ポテンシャル フィールド法、ベクトル ドメイン ヒストグラム法、仮想力場法、遺伝的アルゴリズム、およびその他の動的パス プランニング アルゴリズムが含まれます。
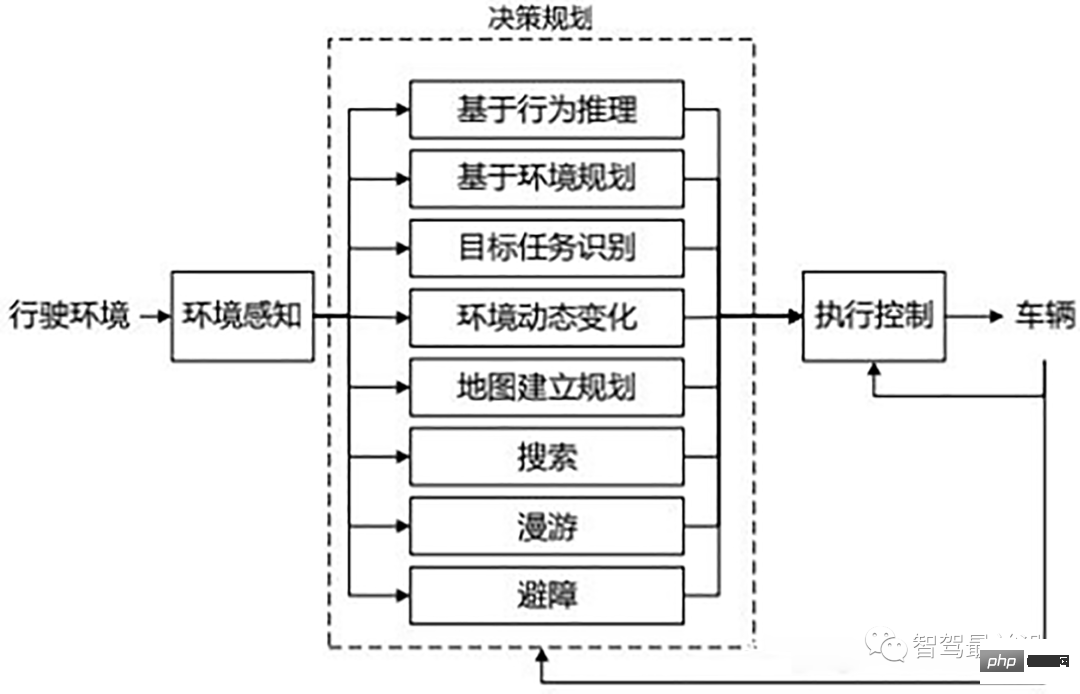
意思決定と計画の層は自動運転システムであり、インテリジェンスを直接反映し、車両と車両全体の運転の安全性において決定的な役割を果たします。意思決定と計画のシステム構造は、プログレッシブ層、リアクティブ層、およびその 2 つの混合層に分かれています。
階層型プログレッシブ アーキテクチャは直列システムの構造です。このシステムでは、インテリジェント ドライビング システムのモジュールは明確な順序で配置され、前のモジュールの出力は入力になります。したがって、次のモジュールへのモジュールは、知覚計画アクション構造とも呼ばれます。しかし、この構造の信頼性は高くなく、ひとたび特定のモジュールでソフトウェアやハードウェアの障害が発生すると、情報の流れ全体に影響を及ぼし、システム全体が崩壊したり機能不全に陥ったりする可能性があります。

#リアクティブ アーキテクチャは並列構造を採用しており、制御層はセンサー入力に基づいて直接決定できるため、生成されたアクションは感覚データの直接の結果であり、知覚されたアクションの特徴を強調することができ、まったく馴染みのない環境に適しています。リアクティブ アーキテクチャの多くの動作は主に単純な特別なタスクに関係するため、計画と制御を密接に統合でき、占有されるストレージ容量が大きくないため、高速な応答と強力なリアルタイム パフォーマンスを生み出すことができます。各層は、システムの特定の動作のみを担当する必要があります。システム全体は、低レベルから高レベルへの移行を便利かつ柔軟に実現できます。さらに、モジュールの 1 つに予期しない障害が発生した場合、残りの層は、意味のある結果を生み出すことは依然として可能です。アクション、システムの堅牢性は大幅に向上しました。問題は、アクションを実行するシステムの柔軟性により、さまざまな制御ループ間の競合を解決し、合意するために特定の調整メカニズムが必要になることです。有意義な結果を得るアクチュエータ。
自動運転の制御コア技術前後方向制御、横方向制御、車両の前後方向制御と車両の駆動・制動制御、横方向制御とはハンドル角の調整とタイヤ力の制御であり、前後方向と横方向の自動制御を実現することで、与えられた目標に従って車両を制御し、自動制御車両の動作を制限することができます。
 #車両の前後方向の制御は、走行速度、つまり車両の速度の方向です。車両と前後の車両や障害物との関係や物体距離を自動制御。クルーズコントロールと緊急ブレーキ制御は、どちらも自動運転における前後方向制御の代表的な例です。このような制御の問題は、モータードライブ、エンジン、トランスミッション、ブレーキシステムの制御に起因している可能性があります。さまざまなモーター、エンジン、トランスミッション モデル、車両動作モデル、ブレーキ プロセス モデルがさまざまなコントローラー アルゴリズムと組み合わされて、さまざまな縦方向の制御モードが形成されます。
#車両の前後方向の制御は、走行速度、つまり車両の速度の方向です。車両と前後の車両や障害物との関係や物体距離を自動制御。クルーズコントロールと緊急ブレーキ制御は、どちらも自動運転における前後方向制御の代表的な例です。このような制御の問題は、モータードライブ、エンジン、トランスミッション、ブレーキシステムの制御に起因している可能性があります。さまざまなモーター、エンジン、トランスミッション モデル、車両動作モデル、ブレーキ プロセス モデルがさまざまなコントローラー アルゴリズムと組み合わされて、さまざまな縦方向の制御モードが形成されます。
車両の横方向制御とは、車両の進行方向に対して垂直な方向の制御を指し、車両が異なる速度や荷重の下でも、希望する走行ルートを自動的に維持し、良好な乗り心地と安定性を実現するように車両を制御することを目的としています。 、耐風性、道路状況。車両の横方向制御には 2 つの基本的な設計方法があり、1 つはドライバー シミュレーションに基づいています (1 つは、より単純なダイナミクス モデルとドライバーの操作ルールを使用してコントローラーを設計する方法であり、もう 1 つはドライバーの操作プロセスを使用する方法です。データ トレーニング コントローラーは、制御アルゴリズム)、もう1つは車の横運動力学モデルを与える制御手法(正確な車の横運動モデルを確立する必要がある。代表的なモデルとしては、左右の特性を考慮した単線モデルなど)
05 概要
環境認識、正確な位置決め、意思決定計画、および制御の実行に加えて、上で紹介したように、自動運転車には、高精度地図、V2X、自動運転車テストなどの高度な主要テクノロジーも必要となります。自動運転技術は、人工知能、高性能チップ、通信技術、センサー技術、車両制御技術、ビッグデータ技術など多分野の技術を組み合わせたものであり、実現は困難です。また、自動運転技術の実現には、自動運転の要件を満たす基幹交通機関の整備や自動運転に関する法規制の検討が必要です。
以上が自動運転の主要な技術的困難を説明する記事の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7549
7549
 15
1382
52
83
11
22
90
15
1382
52
83
11
22
90

 なぜ自動運転ではガウス スプラッティングが非常に人気があるのに、NeRF は放棄され始めているのでしょうか?
Jan 17, 2024 pm 02:57 PM
なぜ自動運転ではガウス スプラッティングが非常に人気があるのに、NeRF は放棄され始めているのでしょうか?
Jan 17, 2024 pm 02:57 PM
上記と著者の個人的な理解 3 次元ガウシアンプラッティング (3DGS) は、近年、明示的な放射線フィールドとコンピューター グラフィックスの分野で出現した革新的なテクノロジーです。この革新的な方法は、数百万の 3D ガウスを使用することを特徴とし、主に暗黙的な座標ベースのモデルを使用して空間座標をピクセル値にマッピングする神経放射線場 (NeRF) 方法とは大きく異なります。明示的なシーン表現と微分可能なレンダリング アルゴリズムにより、3DGS はリアルタイム レンダリング機能を保証するだけでなく、前例のないレベルの制御とシーン編集も導入します。これにより、3DGS は、次世代の 3D 再構築と表現にとって大きな変革をもたらす可能性のあるものとして位置付けられます。この目的を達成するために、私たちは 3DGS 分野における最新の開発と懸念について初めて体系的な概要を提供します。
 自動運転シナリオにおけるロングテール問題を解決するにはどうすればよいでしょうか?
Jun 02, 2024 pm 02:44 PM
自動運転シナリオにおけるロングテール問題を解決するにはどうすればよいでしょうか?
Jun 02, 2024 pm 02:44 PM
昨日の面接で、ロングテール関連の質問をしたかと聞かれたので、簡単にまとめてみようと思いました。自動運転のロングテール問題とは、自動運転車におけるエッジケース、つまり発生確率が低い考えられるシナリオを指します。認識されているロングテール問題は、現在、単一車両のインテリジェント自動運転車の運用設計領域を制限している主な理由の 1 つです。自動運転の基礎となるアーキテクチャとほとんどの技術的問題は解決されており、残りの 5% のロングテール問題が徐々に自動運転の開発を制限する鍵となってきています。これらの問題には、さまざまな断片的なシナリオ、極端な状況、予測不可能な人間の行動が含まれます。自動運転におけるエッジ シナリオの「ロング テール」とは、自動運転車 (AV) におけるエッジ ケースを指します。エッジ ケースは、発生確率が低い可能性のあるシナリオです。これらの珍しい出来事
 カメラかライダーを選択しますか?堅牢な 3D オブジェクト検出の実現に関する最近のレビュー
Jan 26, 2024 am 11:18 AM
カメラかライダーを選択しますか?堅牢な 3D オブジェクト検出の実現に関する最近のレビュー
Jan 26, 2024 am 11:18 AM
0.前面に書かれています&& 自動運転システムは、さまざまなセンサー (カメラ、ライダー、レーダーなど) を使用して周囲の環境を認識し、アルゴリズムとモデルを使用することにより、高度な知覚、意思決定、および制御テクノロジーに依存しているという個人的な理解リアルタイムの分析と意思決定に。これにより、車両は道路標識の認識、他の車両の検出と追跡、歩行者の行動の予測などを行うことで、安全な運行と複雑な交通環境への適応が可能となり、現在広く注目を集めており、将来の交通分野における重要な開発分野と考えられています。 。 1つ。しかし、自動運転を難しくしているのは、周囲で何が起こっているかを車に理解させる方法を見つけることです。これには、自動運転システムの 3 次元物体検出アルゴリズムが、周囲環境にある物体 (位置を含む) を正確に認識し、記述することができる必要があります。
 Stable Diffusion 3 の論文がついに公開され、アーキテクチャの詳細が明らかになりましたが、Sora の再現に役立つでしょうか?
Mar 06, 2024 pm 05:34 PM
Stable Diffusion 3 の論文がついに公開され、アーキテクチャの詳細が明らかになりましたが、Sora の再現に役立つでしょうか?
Mar 06, 2024 pm 05:34 PM
StableDiffusion3 の論文がついに登場しました!このモデルは2週間前にリリースされ、Soraと同じDiT(DiffusionTransformer)アーキテクチャを採用しており、リリースされると大きな話題を呼びました。前バージョンと比較して、StableDiffusion3で生成される画像の品質が大幅に向上し、マルチテーマプロンプトに対応したほか、テキスト書き込み効果も向上し、文字化けが発生しなくなりました。 StabilityAI は、StableDiffusion3 はパラメータ サイズが 800M から 8B までの一連のモデルであると指摘しました。このパラメーター範囲は、モデルを多くのポータブル デバイス上で直接実行できることを意味し、AI の使用を大幅に削減します。
 自動運転と軌道予測についてはこの記事を読めば十分です!
Feb 28, 2024 pm 07:20 PM
自動運転と軌道予測についてはこの記事を読めば十分です!
Feb 28, 2024 pm 07:20 PM
自動運転では軌道予測が重要な役割を果たしており、自動運転軌道予測とは、車両の走行過程におけるさまざまなデータを分析し、将来の車両の走行軌跡を予測することを指します。自動運転のコアモジュールとして、軌道予測の品質は下流の計画制御にとって非常に重要です。軌道予測タスクには豊富な技術スタックがあり、自動運転の動的/静的知覚、高精度地図、車線境界線、ニューラル ネットワーク アーキテクチャ (CNN&GNN&Transformer) スキルなどに精通している必要があります。始めるのは非常に困難です。多くのファンは、できるだけ早く軌道予測を始めて、落とし穴を避けたいと考えています。今日は、軌道予測に関するよくある問題と入門的な学習方法を取り上げます。関連知識の紹介 1. プレビュー用紙は整っていますか? A: まずアンケートを見てください。
 SIMPL: 自動運転向けのシンプルで効率的なマルチエージェント動作予測ベンチマーク
Feb 20, 2024 am 11:48 AM
SIMPL: 自動運転向けのシンプルで効率的なマルチエージェント動作予測ベンチマーク
Feb 20, 2024 am 11:48 AM
原題: SIMPL: ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving 論文リンク: https://arxiv.org/pdf/2402.02519.pdf コードリンク: https://github.com/HKUST-Aerial-Robotics/SIMPL 著者単位: 香港科学大学DJI 論文のアイデア: この論文は、自動運転車向けのシンプルで効率的な動作予測ベースライン (SIMPL) を提案しています。従来のエージェントセントとの比較
 エンドツーエンドおよび次世代の自動運転システムと、エンドツーエンドの自動運転に関する誤解について話しましょう。
Apr 15, 2024 pm 04:13 PM
エンドツーエンドおよび次世代の自動運転システムと、エンドツーエンドの自動運転に関する誤解について話しましょう。
Apr 15, 2024 pm 04:13 PM
この 1 か月間、いくつかのよく知られた理由により、私は業界のさまざまな教師やクラスメートと非常に集中的な交流をしてきました。この交換で避けられない話題は当然、エンドツーエンドと人気の Tesla FSDV12 です。この機会に、現時点での私の考えや意見を整理し、皆様のご参考とご議論に役立てたいと思います。エンドツーエンドの自動運転システムをどのように定義するか、またエンドツーエンドで解決することが期待される問題は何でしょうか?最も伝統的な定義によれば、エンドツーエンド システムとは、センサーから生の情報を入力し、関心のある変数をタスクに直接出力するシステムを指します。たとえば、画像認識では、従来の特徴抽出 + 分類子方式と比較して、CNN はエンドツーエンドと言えます。自動運転タスクでは、各種センサー(カメラ/LiDAR)からのデータを入力
 nuScenes の最新 SOTA | SparseAD: スパース クエリは効率的なエンドツーエンドの自動運転に役立ちます。
Apr 17, 2024 pm 06:22 PM
nuScenes の最新 SOTA | SparseAD: スパース クエリは効率的なエンドツーエンドの自動運転に役立ちます。
Apr 17, 2024 pm 06:22 PM
先頭と開始点に書かれている エンドツーエンドのパラダイムでは、統一されたフレームワークを使用して自動運転システムのマルチタスクを実現します。このパラダイムの単純さと明確さにも関わらず、サブタスクにおけるエンドツーエンドの自動運転手法のパフォーマンスは、依然としてシングルタスク手法に比べてはるかに遅れています。同時に、以前のエンドツーエンド手法で広く使用されていた高密度鳥瞰図 (BEV) 機能により、より多くのモダリティやタスクに拡張することが困難になります。ここでは、スパース検索中心のエンドツーエンド自動運転パラダイム (SparseAD) が提案されています。このパラダイムでは、スパース検索は、高密度の BEV 表現を使用せずに、空間、時間、タスクを含む運転シナリオ全体を完全に表します。具体的には、統合されたスパース アーキテクチャが、検出、追跡、オンライン マッピングなどのタスク認識のために設計されています。さらに、重い
