

PHP で自動運転と車両のインターネットを開発するにはどうすればよいですか?

PHP は人気のある Web 開発言語として、効率的でスケーラブルな自動運転および車両のインターネット アプリケーションの構築に役立ちます。自動運転技術はますます広く使用されるようになっており、自動車のインターネットは自動車業界の新しいトレンドとなっているため、自動運転と車両のインターネットの開発に PHP を使用する方法を理解することが非常に重要です。
自動運転技術
自動運転技術とは、ドライバーの介入なしに車が自動運転できることを意味します。自動運転技術では、車両はさまざまなセンサー (レーダー、カメラ、ライダーなど) を使用して環境情報を収集し、高度なアルゴリズムを使用して衝突の回避、減速や車線変更、運転方向などの問題を解決します。ここで、PHP は、次のようないくつかの基本機能を含む、自動運転機能をサポートする Web アプリケーションの構築に役立ちます。
- データ管理
自動運転技術カンファレンスセンサーデータ、車両運行データ、交通情報などのデータが生成されます。このデータの管理は非常に重要であるため、多くの自動運転アプリケーションの中心となっています。
- コミュニケーションとコラボレーション
自動運転車は、さまざまな道路状況で情報を交換したり、行動を調整したりするために、他の車両やインフラと相互運用できなければなりません。 PHP は、さまざまなセンサーやデバイス用の通信システムを構築し、車両の連携を支援して自動運転を実現するのに役立ちます。
- 統合とテスト
自動運転技術では、ハードウェアとソフトウェアがうまく連携して自動運転を実現する必要があります。 PHP は、ソフトウェアと統合ハードウェアのテスト、およびシミュレーターベースのテスト ツールの開発に役立ちます。
車両のインターネット技術
車両のインターネット技術とは、車両、人間、インフラを接続し、インタラクティブなシステムを形成できる、スマート カーとコネクテッド ビークルで構成されるネットワークを指します。したがって、車両のインターネットの開発において、PHP は次の側面でアプリケーションの構築に役立ちます。
- インテリジェントな制御
車両のインターネット テクノロジは、車両のインテリジェントな制御を支援します。自動ナビゲーション、自動駐車、自動緊急ブレーキなどの自分自身の運転。 PHP は、車両がこれらの操作を安全に実行できるように、車両のインターネットと通信する Web アプリケーションを構築するのに役立ちます。
- 交通情報
車両のインターネット技術は、交通の流れ、車の速度、道路工事などの運転状況を収集して分析し、ドライバーがより適切な計画を立てるのに役立ちます。運転ルート。 PHP は、交通の流れを予測および分析し、運転に関する推奨事項を提供する車両のインターネット アプリケーションの構築に役立ちます。
- カーシェアリング
車両のインターネット技術をさまざまな車両間で共有して、1 台の車両の使用量と排出量を削減できます。 PHP は、カーシェアリング用の Web アプリケーションの開発に役立ち、車の所有者がカーシェアリング プランや配送サービスをオンラインで管理できるようになります。
- 運転行動監視
車両のインターネット アプリケーションは、ドライバーの運転データを収集し、高度なアルゴリズムを使用してこのデータを分析し、ドライバーが安全に運転できるようにガイドします。 PHP は、車両のインターネットと通信してドライバーの行動と車両の操作を監視し、すべての車両が安全に運転されるようにするアプリケーションの構築と管理に役立ちます。
概要
この記事では、PHP を使用して自動運転およびカー ネットワーキング テクノロジを実装する方法を学びました。 PHP は、効率的でスケーラブルなアプリケーションの構築に役立つ人気の Web プログラミング言語です。自動運転技術と車両のインターネット技術は自動車業界の新しいトレンドであり、これらの技術のアプリケーションを開発するために PHP を使用する方法を学ぶことは、将来の発展に大きな可能性をもたらします。
以上がPHP で自動運転と車両のインターネットを開発するにはどうすればよいですか?の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7552
7552
 15
1382
52
83
11
22
95
15
1382
52
83
11
22
95

 PHP は行を CSV にフォーマットし、ファイル ポインターを書き込みます
Mar 22, 2024 am 09:00 AM
PHP は行を CSV にフォーマットし、ファイル ポインターを書き込みます
Mar 22, 2024 am 09:00 AM
この記事では、PHP が行を CSV にフォーマットし、ファイル ポインタを書き込む方法について詳しく説明します。非常に実践的だと思いますので、参考として共有します。この記事を読んで何かを得ることができれば幸いです。行を CSV にフォーマットし、ファイル ポインターに書き込む ステップ 1: ファイル ポインターを開く $file=fopen("path/to/file.csv","w"); ステップ 2: fputcsv( ) 関数を使用して行を CSV 文字列に変換するCSV文字列に変換します。この関数は次のパラメータを受け入れます。 $file: ファイル ポインタ $fields: 配列としての CSV フィールド $delimiter: フィールド区切り文字 (オプション) $enclosure: フィールド引用符 (
 自動運転シナリオにおけるロングテール問題を解決するにはどうすればよいでしょうか?
Jun 02, 2024 pm 02:44 PM
自動運転シナリオにおけるロングテール問題を解決するにはどうすればよいでしょうか?
Jun 02, 2024 pm 02:44 PM
昨日の面接で、ロングテール関連の質問をしたかと聞かれたので、簡単にまとめてみようと思いました。自動運転のロングテール問題とは、自動運転車におけるエッジケース、つまり発生確率が低い考えられるシナリオを指します。認識されているロングテール問題は、現在、単一車両のインテリジェント自動運転車の運用設計領域を制限している主な理由の 1 つです。自動運転の基礎となるアーキテクチャとほとんどの技術的問題は解決されており、残りの 5% のロングテール問題が徐々に自動運転の開発を制限する鍵となってきています。これらの問題には、さまざまな断片的なシナリオ、極端な状況、予測不可能な人間の行動が含まれます。自動運転におけるエッジ シナリオの「ロング テール」とは、自動運転車 (AV) におけるエッジ ケースを指します。エッジ ケースは、発生確率が低い可能性のあるシナリオです。これらの珍しい出来事
 PHP は現在の umask を変更します
Mar 22, 2024 am 08:41 AM
PHP は現在の umask を変更します
Mar 22, 2024 am 08:41 AM
この記事では、PHP での現在の umask の変更について詳しく説明します。編集者が非常に実用的であると考えたので、参考として共有します。この記事を読んで何かを得ることができれば幸いです。現在の umask を変更する PHP の概要 umask は、新しく作成されたファイルとディレクトリのデフォルトのファイル権限を設定するために使用される PHP 関数です。引数を 1 つ受け取ります。これは、ブロックの許可を表す 8 進数です。たとえば、新しく作成されたファイルへの書き込み権限を禁止するには、002 を使用します。 umask を変更する方法 PHP で現在の umask を変更するには 2 つの方法があります。 umask() 関数を使用する: umask() 関数は現在の umask を直接変更します。その構文は次のとおりです。
 PHP は一意のファイル名でファイルを作成します
Mar 21, 2024 am 11:22 AM
PHP は一意のファイル名でファイルを作成します
Mar 21, 2024 am 11:22 AM
この記事では、PHP で独自のファイル名を付けたファイルを作成する方法を詳しく解説します。編集者が非常に実践的だと考えたので、参考として共有します。この記事を読んで何かを得ることができれば幸いです。 PHP で一意のファイル名を持つファイルを作成する はじめに PHP で一意のファイル名を持つファイルを作成することは、ファイル システムを編成および管理するために不可欠です。一意のファイル名により、既存のファイルが上書きされず、特定のファイルの検索と取得が容易になります。このガイドでは、PHP で一意のファイル名を生成するいくつかの方法について説明します。方法 1: uniqid() 関数を使用する uniqid() 関数は、現在の時刻とマイクロ秒に基づいて一意の文字列を生成します。この文字列はファイル名の基礎として使用できます。
 エンドツーエンドおよび次世代の自動運転システムと、エンドツーエンドの自動運転に関する誤解について話しましょう。
Apr 15, 2024 pm 04:13 PM
エンドツーエンドおよび次世代の自動運転システムと、エンドツーエンドの自動運転に関する誤解について話しましょう。
Apr 15, 2024 pm 04:13 PM
この 1 か月間、いくつかのよく知られた理由により、私は業界のさまざまな教師やクラスメートと非常に集中的な交流をしてきました。この交換で避けられない話題は当然、エンドツーエンドと人気の Tesla FSDV12 です。この機会に、現時点での私の考えや意見を整理し、皆様のご参考とご議論に役立てたいと思います。エンドツーエンドの自動運転システムをどのように定義するか、またエンドツーエンドで解決することが期待される問題は何でしょうか?最も伝統的な定義によれば、エンドツーエンド システムとは、センサーから生の情報を入力し、関心のある変数をタスクに直接出力するシステムを指します。たとえば、画像認識では、従来の特徴抽出 + 分類子方式と比較して、CNN はエンドツーエンドと言えます。自動運転タスクでは、各種センサー(カメラ/LiDAR)からのデータを入力
 nuScenes の最新 SOTA | SparseAD: スパース クエリは効率的なエンドツーエンドの自動運転に役立ちます。
Apr 17, 2024 pm 06:22 PM
nuScenes の最新 SOTA | SparseAD: スパース クエリは効率的なエンドツーエンドの自動運転に役立ちます。
Apr 17, 2024 pm 06:22 PM
先頭と開始点に書かれている エンドツーエンドのパラダイムでは、統一されたフレームワークを使用して自動運転システムのマルチタスクを実現します。このパラダイムの単純さと明確さにも関わらず、サブタスクにおけるエンドツーエンドの自動運転手法のパフォーマンスは、依然としてシングルタスク手法に比べてはるかに遅れています。同時に、以前のエンドツーエンド手法で広く使用されていた高密度鳥瞰図 (BEV) 機能により、より多くのモダリティやタスクに拡張することが困難になります。ここでは、スパース検索中心のエンドツーエンド自動運転パラダイム (SparseAD) が提案されています。このパラダイムでは、スパース検索は、高密度の BEV 表現を使用せずに、空間、時間、タスクを含む運転シナリオ全体を完全に表します。具体的には、統合されたスパース アーキテクチャが、検出、追跡、オンライン マッピングなどのタスク認識のために設計されています。さらに、重い
 FisheyeDetNet: 魚眼カメラに基づいた最初のターゲット検出アルゴリズム
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: 魚眼カメラに基づいた最初のターゲット検出アルゴリズム
Apr 26, 2024 am 11:37 AM
目標検出は自動運転システムにおいて比較的成熟した問題であり、その中でも歩行者検出は最も初期に導入されたアルゴリズムの 1 つです。ほとんどの論文では非常に包括的な研究が行われています。ただし、サラウンドビューに魚眼カメラを使用した距離認識については、あまり研究されていません。放射状の歪みが大きいため、標準のバウンディング ボックス表現を魚眼カメラに実装するのは困難です。上記の説明を軽減するために、拡張バウンディング ボックス、楕円、および一般的な多角形の設計を極/角度表現に探索し、これらの表現を分析するためのインスタンス セグメンテーション mIOU メトリックを定義します。提案された多角形モデルの FisheyeDetNet は、他のモデルよりも優れたパフォーマンスを示し、同時に自動運転用の Valeo 魚眼カメラ データセットで 49.5% の mAP を達成しました。
 量産型キラー! P-Mapnet: 従来の低精度地図 SDMap を使用することで、マッピングのパフォーマンスが 20 ポイント近く大幅に向上しました。
Mar 28, 2024 pm 02:36 PM
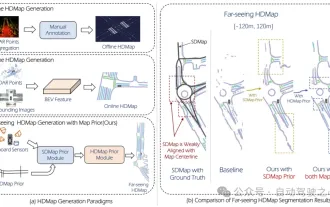
量産型キラー! P-Mapnet: 従来の低精度地図 SDMap を使用することで、マッピングのパフォーマンスが 20 ポイント近く大幅に向上しました。
Mar 28, 2024 pm 02:36 PM
上で書いたように、高精度地図への依存を取り除くために現在の自動運転システムで使用されているアルゴリズムの 1 つは、長距離領域での知覚性能が依然として低いという事実を利用するものです。この目的を達成するために、私たちは P-MapNet を提案します。「P」はモデルのパフォーマンスを向上させるためにマップ事前分布を融合することに焦点を当てています。具体的には、SDMap と HDMap の事前情報を活用します。一方で、OpenStreetMap から弱く調整された SDMap データを抽出し、入力をサポートするためにそれを独立した用語にエンコードします。厳密に変更された入力と実際の HD+Map の間には調整が弱いという問題がありますが、クロスアテンション メカニズムに基づく構造は、SDMap スケルトンに適応的に焦点を合わせ、大幅なパフォーマンスの向上をもたらします。
