

CHEATC2023|中国科学技術大学、Chen Xiaoping: 大型モデルからソフトロボットまで

今年の初め以来、ChatGPT の継続的な人気に伴い、大型モデルも急速な発展期に入り、多くの国内外の有名テクノロジー企業が独自に開発した大型モデル製品を次々と発売しています。では、大型モデルの技術原理は何でしょうか?
5 月 18 日、2023 年中国家電技術会議 (CHEATC2023) への参加に招待された中国科学技術大学ロボット工学研究室所長の陳小平教授が研究と見解を共有しました。中国人工知能学会の人工知能倫理部門の責任者でもある陳小平教授は、この会議でガバナンス委員会の委員長とともに「人工知能の新展開:大型モデルからソフトロボットまで」と題した基調講演を行った。 、大規模な人工知能モデルの技術原理と人工知能の応用における新しい展開を紹介します。

中国科学技術大学の陳小平教授
「ビッグ モデルの基本原理は、予測を行うことです。」と陳小平氏は述べました。人工知能の開発は現在、第 4 の波のプロセスを開始しており、データ モデルもビッグ データ駆動型からビッグ トレーニングに移行しています。運転される。これまでの 3 つの波とは異なり、人工知能の新しい段階では、トレーニング データの質、量、取得方法に関する新しい要件があり、最終的に大規模な実際のシーンに適用できるサンプル モデルが形成されます。同氏は、大規模モデルとは、単一または少数のテクノロジーの単純な組み合わせではなく、複数のテクノロジーによって統合されたインテリジェントなシステムであることを強調しました。 「
大型モデルの台頭は生成型人工知能によるもの 現在、生成型人工知能は単に言語や画像などのコンテンツを生成するだけでなく、人間の自然言語の正確な処理に基づいた知能を完成させます。交流。陳小平氏は、「現段階で我々が機械言語処理に期待しているのは、人間の言葉を話し、人間の言葉を理解し、たとえ答えが正しくないとしても質問に答えることができることだ。その中で基本的な要件は、音声が理解できることである」と語った。 「人間の言語習慣には科学的な基準はないが、経験的な基準は存在するので、機械はどのようにして人間の言語習慣を習得し、活用できるのでしょうか?」陳小平氏はこう述べた「基本的な研究のアイデアと大規模モデルの成功の秘訣」 「大規模な人間のコーパスから言語を抽出します。トレースして、人間とコンピューターの自然言語対話に使用されます。」
大規模モデルは、元の人間のコーパスから文字、単語、句読点などの意味要素を抽出し、前後の意味要素間の相関関係に基づいて意味レビューを実行し、最終的に行動予測を実現します。原則として、遡及される意味要素の数が多いほど、予測の精度は高くなります。大規模なモデルでは少なくとも 4,000 トークンをレビューでき、一部のモデルでは最大 100,000 トークンをレビューできます。 「陳小平氏はこう述べた。大規模モデル技術システムは、事前にトレーニングされたモデルに基づいており、その後、特別にトレーニングされた特別なモデルを使用してユーザーガイダンスモデルと連携し、ユーザーの質問を正確に理解して回答します。3つの主要モデルはそれぞれ連携します。」その他、人工知能の回答の品質は大幅な向上を達成できます。
大規模モデルの出現は人工知能に新たな革新的な方向性をもたらしましたが、それは現実世界のシナリオのすべての側面に適用できるわけではありません。陳小平氏によると、現在中国が征服する必要がある人工知能の 3 つの主要分野は、インテリジェント製造、インテリジェント農業、包括的な高齢者ケアです。 「この3つの大きな戦いを乗り越えれば、世界の風景は一変するでしょう。」 一方、大型モデルは大きな変化をもたらすと同時に、新たな課題ももたらします。大きなモデルが人間の機能の模倣に基づいている場合、それらは感情や意識を持っていると考えられる可能性があります。これは、人は習慣的に概念の理解をその概念を含む構造全体に当てはめて、その構造が表現する情報も同じ意味を持つと考えているためですが、実際にはそうではありません。 「陳小平氏は、大規模モデルの適用は公共の安全、雇用、長期的な影響を与える可能性があると述べた。
大規模モデルに加えて、陳小平教授は「物理世界における人工知能」に関する新たな科学研究成果も達成しました。現在、私たちが応用している人工知能の物理的形態は、主に剛体ロボットです。この種のロボットは再現性は高いですが、器用さと安全性が低く、構造化された環境には適していますが、非構造化環境で実行する必要があります。測定、モデリング、計算には高度な技術要件が必要ですが、現在ほとんどの業界には適していません。剛体ロボットのこれらの欠点に対応して、陳小平は、知能ロボットの動作対象の正確な測定が不可能であること、作業環境と動作対象の正確なモデリングが不可能であるという 3 つの基本的な前提の下で、融合の原理を提案しました。正確な意思決定は不可能であるため、空気圧ハニカム ネットワーク ソフトウェア アームを開発しました。この種のアームは柔軟性と耐荷重の点で優れた性能を備えており、外部干渉や物体の不規則な動きがある場合でも正確な制御を実現できます。この技術は、ホームサービス、感情インタラクション、自動運転などの分野で幅広い応用が期待されています。一方、陳小平氏のチームは、柔軟なアームと硬い機械を組み合わせた結果、「硬い爪と柔らかい爪が一つになった」という実験結果が得られ、プログラムやハードウェアのパラメータを変更したり、力を加えたりすることなくロボットの制御を実現できるようになった。フィードバックセンサーにより、複数の形状の物体を正確にグリップします。
以上がCHEATC2023|中国科学技術大学、Chen Xiaoping: 大型モデルからソフトロボットまでの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7478
7478
 15
1377
52
77
11
19
33
15
1377
52
77
11
19
33

 ビッグモデルアプリ Tencent Yuanbao がオンラインになりました! Hunyuan がアップグレードされ、どこにでも持ち運べるオールラウンドな AI アシスタントが作成されました
Jun 09, 2024 pm 10:38 PM
ビッグモデルアプリ Tencent Yuanbao がオンラインになりました! Hunyuan がアップグレードされ、どこにでも持ち運べるオールラウンドな AI アシスタントが作成されました
Jun 09, 2024 pm 10:38 PM
5月30日、TencentはHunyuanモデルの包括的なアップグレードを発表し、Hunyuanモデルに基づくアプリ「Tencent Yuanbao」が正式にリリースされ、AppleおよびAndroidアプリストアからダウンロードできるようになりました。前のテスト段階のフンユアン アプレット バージョンと比較して、Tencent Yuanbao は、日常生活シナリオ向けの AI 検索、AI サマリー、AI ライティングなどのコア機能を提供し、Yuanbao のゲームプレイもより豊富で、複数の機能を提供します。 、パーソナルエージェントの作成などの新しいゲームプレイ方法が追加されます。 Tencent Cloud 副社長で Tencent Hunyuan 大型モデルの責任者である Liu Yuhong 氏は、「テンセントは、最初に大型モデルを開発しようとはしません。」と述べました。 Tencent Hunyuan の大型モデルは、ビジネス シナリオにおける豊富で大規模なポーランド テクノロジーを活用しながら、ユーザーの真のニーズを洞察します。
 Bytedance Beanbao 大型モデルがリリース、Volcano Engine フルスタック AI サービスが企業のインテリジェントな変革を支援
Jun 05, 2024 pm 07:59 PM
Bytedance Beanbao 大型モデルがリリース、Volcano Engine フルスタック AI サービスが企業のインテリジェントな変革を支援
Jun 05, 2024 pm 07:59 PM
Volcano Engine の社長である Tan Dai 氏は、大規模モデルを実装したい企業は、モデルの有効性、推論コスト、実装の難易度という 3 つの重要な課題に直面していると述べました。複雑な問題を解決するためのサポートとして、適切な基本的な大規模モデルが必要です。また、サービスは低コストの推論を備えているため、大規模なモデルを広く使用できるようになり、企業がシナリオを実装できるようにするためには、より多くのツール、プラットフォーム、アプリケーションが必要になります。 ——Huoshan Engine 01 社長、Tan Dai 氏。大きなビーンバッグ モデルがデビューし、頻繁に使用されています。モデル効果を磨き上げることは、AI の実装における最も重要な課題です。 Tan Dai 氏は、良いモデルは大量に使用することでのみ磨かれると指摘しました。現在、Doubao モデルは毎日 1,200 億トークンのテキストを処理し、3,000 万枚の画像を生成しています。企業による大規模モデルシナリオの実装を支援するために、バイトダンスが独自に開発した豆包大規模モデルが火山を通じて打ち上げられます。
 Shengteng AI テクノロジーを使用した秦嶺・秦川交通モデルは、西安のスマート交通イノベーション センターの構築を支援します
Oct 15, 2023 am 08:17 AM
Shengteng AI テクノロジーを使用した秦嶺・秦川交通モデルは、西安のスマート交通イノベーション センターの構築を支援します
Oct 15, 2023 am 08:17 AM
「高度な複雑性、高度な断片化、およびクロスドメイン」は、輸送業界のデジタル化およびインテリジェントなアップグレードに向かう上で常に主要な問題点でした。最近、チャイナビジョン、西安雁塔区政府、西安未来人工知能コンピューティングセンターが共同で構築したパラメータースケール1000億の「秦嶺・秦川交通モデル」は、スマート交通・交通分野を指向している。西安とその周辺地域にサービスを提供しており、この地域はスマート交通イノベーションの拠点となるでしょう。 「秦嶺・秦川交通モデル」は、オープンシナリオにおける西安の膨大な地元交通生態データ、中国科学ビジョンが自社開発したオリジナルの高度なアルゴリズム、そして西安未来人工知能コンピューティングセンターのShengteng AIの強力なコンピューティング能力を組み合わせたものです。道路網の監視を提供するため、緊急指令、メンテナンス管理、公共交通機関などのスマートな交通シナリオは、デジタルでインテリジェントな変化をもたらします。交通管理には都市ごとに異なる特徴があり、道路の交通状況も異なります。
 NVIDIA の大規模モデル推論フレームワークを明らかにする: TensorRT-LLM
Feb 01, 2024 pm 05:24 PM
NVIDIA の大規模モデル推論フレームワークを明らかにする: TensorRT-LLM
Feb 01, 2024 pm 05:24 PM
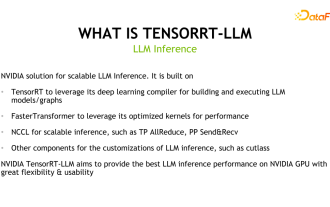
1. TensorRT-LLM の製品位置付け TensorRT-LLM は、NVIDIA が開発した大規模言語モデル (LLM) 向けのスケーラブルな推論ソリューションです。 TensorRT 深層学習コンパイル フレームワークに基づいて計算グラフを構築、コンパイル、実行し、FastTransformer の効率的なカーネル実装を利用します。さらに、デバイス間の通信には NCCL を利用します。開発者は、カットラスに基づいてカスタマイズされた GEMM を開発するなど、技術開発や需要の違いに基づいて特定のニーズを満たすためにオペレーターをカスタマイズできます。 TensorRT-LLM は、NVIDIA の公式推論ソリューションであり、高いパフォーマンスを提供し、実用性を継続的に向上させることに尽力しています。 TensorRT-LL
 GPT-4をベンチマーク!中国移動の九天大型モデルが二重登録を通過
Apr 04, 2024 am 09:31 AM
GPT-4をベンチマーク!中国移動の九天大型モデルが二重登録を通過
Apr 04, 2024 am 09:31 AM
4月4日のニュースによると、中国サイバースペース局は最近、登録された大型モデルのリストを発表し、その中にチャイナモバイルの「九天自然言語インタラクション大型モデル」が含まれており、チャイナモバイルの九天AI大型モデルが生成人工言語を正式に提供できることを示した。外部世界への諜報機関。チャイナモバイルは、これは中央企業が開発した初めての大規模モデルであり、国家の「生成人工知能サービス登録」と「国内深層合成サービスアルゴリズム登録」の二重登録を通過したと述べた。報告によると、Juiutian の自然言語インタラクション大規模モデルは、強化された業界能力、セキュリティ、信頼性の特徴を持ち、フルスタック ローカリゼーションをサポートしており、90 億、139 億、570 億、1000 億などのさまざまなパラメータ バージョンを形成しており、クラウド、エッジ、エンドでは状況が異なりますが、柔軟に導入できます。
 産業ナレッジグラフの高度な実践
Jun 13, 2024 am 11:59 AM
産業ナレッジグラフの高度な実践
Jun 13, 2024 am 11:59 AM
1. 背景の紹介 まず、Yunwen Technology の開発の歴史を紹介します。 Yunwen Technology Company ...2023 年は大規模モデルが普及する時期であり、多くの企業は大規模モデルの後、グラフの重要性が大幅に低下し、以前に検討されたプリセット情報システムはもはや重要ではないと考えています。しかし、RAG の推進とデータ ガバナンスの普及により、より効率的なデータ ガバナンスと高品質のデータが民営化された大規模モデルの有効性を向上させるための重要な前提条件であることがわかり、ますます多くの企業が注目し始めています。知識構築関連コンテンツへ。これにより、知識の構築と処理がより高いレベルに促進され、探索できる技術や方法が数多く存在します。新しいテクノロジーの出現によってすべての古いテクノロジーが打ち破られるわけではなく、新旧のテクノロジーが統合される可能性があることがわかります。
 新しいテストベンチマークがリリース、最も強力なオープンソースのLlama 3が困惑
Apr 23, 2024 pm 12:13 PM
新しいテストベンチマークがリリース、最も強力なオープンソースのLlama 3が困惑
Apr 23, 2024 pm 12:13 PM
テストの問題が簡単すぎると、上位の生徒も下位の生徒も 90 点を獲得でき、その差は広がりません。Claude3、Llama3、さらには GPT-5 などのより強力なモデルが後にリリースされるため、業界はより困難で差別化されたモデルのベンチマークが緊急に必要です。大型モデルアリーナの背後にある組織 LMSYS は、次世代ベンチマーク Arena-Hard を発表し、広く注目を集めました。 Llama3 命令の 2 つの微調整されたバージョンの強度に関する最新のリファレンスもあります。全員が同様のスコアを持っていた以前の MTBench と比較すると、アリーナとハードの識別は 22.6% から 87.4% に増加し、一目で強くも弱くもなりました。 Arena-Hard は、アリーナからのリアルタイムの人間データを使用して構築されており、人間の好みとの一致率は 89.1% です。
 Xiaomi Byteが力を合わせます! Xiao Ai の Doubao へのアクセスの大規模モデル: 携帯電話と SU7 にすでにインストールされています
Jun 13, 2024 pm 05:11 PM
Xiaomi Byteが力を合わせます! Xiao Ai の Doubao へのアクセスの大規模モデル: 携帯電話と SU7 にすでにインストールされています
Jun 13, 2024 pm 05:11 PM
6月13日のニュースによると、Byteの「Volcano Engine」公開アカウントによると、Xiaomiの人工知能アシスタント「Xiao Ai」はVolcano Engineとの協力に達し、両社はbeanbao大型モデルに基づいて、よりインテリジェントなAIインタラクティブ体験を実現するとのこと。 。 ByteDance が作成した大規模な豆包モデルは、毎日最大 1,200 億のテキスト トークンを効率的に処理し、3,000 万個のコンテンツを生成できると報告されています。 Xiaomi は、Doubao 大型モデルを使用して、独自モデルの学習能力と推論能力を向上させ、ユーザーのニーズをより正確に把握するだけでなく、より速い応答速度とより包括的なコンテンツ サービスを提供する新しい「Xiao Ai Classmate」を作成しました。たとえば、ユーザーが複雑な科学的概念について質問する場合、&ldq
