

トランスフォーマーよりも 40% 高速です。 Meta、計算能力損失の問題を解決する新しいメガバイトモデルをリリース

Transformer は、間違いなく過去数年間で機械学習の分野で最も人気のあるモデルです。
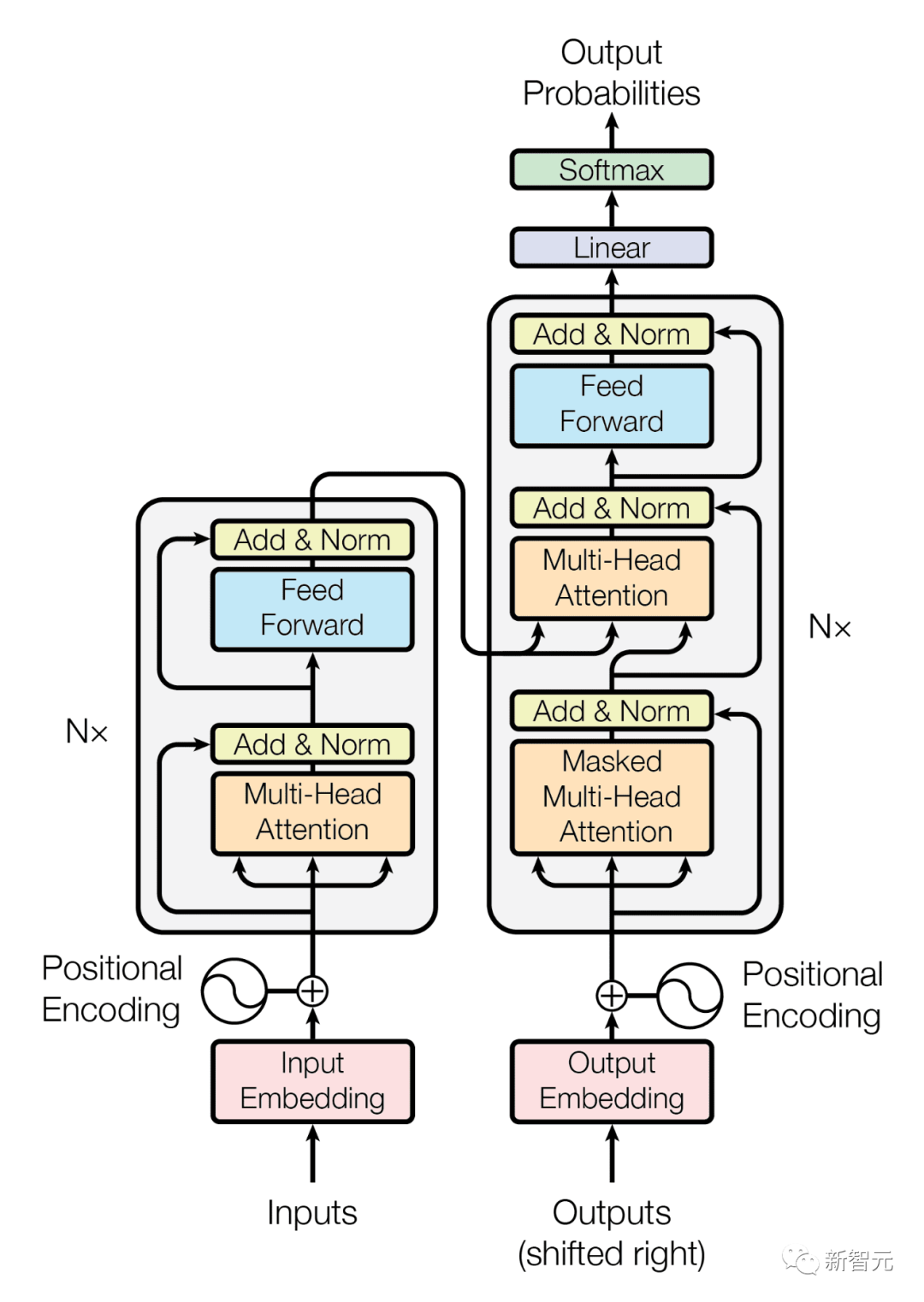
2017 年に論文「Attending is All You Need」で提案されて以来、この新しいネットワーク構造はすべての主要な翻訳タスクを超え、多くの新しい記録を生み出しました。
しかし、Transformer には長いバイト シーケンスを処理するときに欠陥があります。つまり、計算能力が大幅に失われ、Meta の研究者の最新の結果は、この欠点をうまく解決することができます。
彼らは、複数の形式にわたって 100 万を超えるトークンを生成でき、GPT-4 などのモデルの背後にある既存の Transformer アーキテクチャの機能を超える新しいモデル アーキテクチャを立ち上げました。
このモデルは「メガバイト」と呼ばれ、100 万バイト以上を処理できるマルチスケール デコーダ アーキテクチャであり、シーケンスはエンドツーエンドの微分可能なモデリングです。
紙のリンク: https://arxiv.org/abs/2305.07185
Megabyte が Transformer よりも優れている理由については、まず Transformer の欠点を確認する必要があります。
Transformer の欠点これまでのところ、OpenAI の GPT-4 や Google の Bard など、数種類の高性能生成 AI モデルはすべて Transformer に基づいています。アーキテクチャ、モデル。
しかし、Meta の研究チームは、主に Transformer 設計に内在する 2 つの重要な欠陥が原因で、人気の Transformer アーキテクチャが限界に達しつつあるのではないかと考えています。 ##- 入力バイト長と出力バイト長が増加するにつれて、セルフアテンションのコストも急速に増加します。たとえば、入力音楽、画像、またはビデオ ファイルには、通常、数メガバイトが含まれます。ただし、ラージ デコーダ (LLM) は、多くの場合、数千メガバイトしか使用しません。コンテキスト トークン
- フィードフォワード ネットワークは、言語モデルが一連の数学的演算と変換を通じて単語を理解して処理するのに役立ちますが、位置ごとに拡張するのは性質上困難です。文字グループまたは位置を個別に操作するため、大量の計算オーバーヘッドが発生します。
メガバイトの強みは何ですか。Transformer と比較して、メガバイト モデルは独特の A を示します。入力シーケンスと出力シーケンスを個々のトークンではなくパッチに分割する異なるアーキテクチャ。
以下に示すように、各パッチでは、ローカル AI モデルが結果を生成し、グローバル モデルがすべてのパッチの最終出力を管理および調整します。
まず、バイト シーケンスはトークンとほぼ同様の固定サイズのパッチに分割されます。このモデルは 3 つの要素で構成されます。パーツの構成: 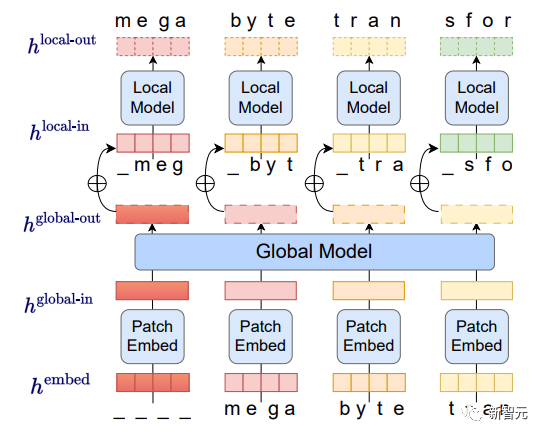
##(1) パッチエンベッダー: 各バイトのエンベディングをロスレスで連結することにより、単純にパッチ
## をエンコードします #(2 ) グローバル モデル: 入力および出力パッチで表される大規模な自己回帰トランスフォーマー(3) ローカル モデル: パッチ内のバイトを予測する小規模な自己回帰モデル
研究者らは、ほとんどのタスク (最初の数文字が与えられた単語を完成させるなど) ではバイト予測が比較的簡単であることを観察しました。つまり、各単語は、大きな結び目のネットワークは不要で、より小さいモデルになります。内部予測に使用できます。
このアプローチは、今日の AI モデルに蔓延するスケーラビリティの課題を解決します。メガバイト モデルのパッチ システムにより、単一のフィードフォワード ネットワークが複数のトークンを含むパッチ上で実行できるようになり、セルフ アテンションの問題が効果的に解決されます。スケーリングの問題。
その中で、メガバイト アーキテクチャでは、長いシーケンス モデリングのための Transformer に 3 つの大きな改善が加えられました。
- 二次自己注意 (サブ) -二次自己注意)
長いシーケンス モデルに関するほとんどの研究は、自己注意の二次コストを軽減することに重点を置いていますが、Megabyte は長いシーケンスを 2 つの短いシーケンスに分割しますが、それでも簡単です長いシーケンスでも処理できます。
- パッチ フィードフォワード レイヤー (パッチごとのフィードフォワード レイヤー)
GPT-3 サイズのモデルで 98% 以上の FLOPS 位置フィードフォワード レイヤーの計算用, Megabyte は、パッチごとに大規模なフィードフォワード レイヤーを使用して、同じコストでより大規模でよりパフォーマンスの高いモデルを実現します。パッチ サイズが P の場合、ベースライン コンバーターは m パラメーターを持つ同じフィードフォワード レイヤーを P 回使用し、Megabyte は同じコストで mP パラメーターを持つレイヤーを 1 回使用できます。
-デコードの並列処理
トランスフォーマーは、ステップへの入力が前のステップの出力になるため、生成中にすべての計算を逐次的に実行する必要があります。 Megabyte では、タイム ステップを調整し、パッチ表現を並行して生成することにより、生成プロセスの並列性を高めることができます。
たとえば、1.5B パラメーターを持つメガバイト モデルは、標準の 350MTransformer よりも 40% 高速にシーケンスを生成すると同時に、トレーニングに同じ量の計算を使用した場合の複雑さも改善します。
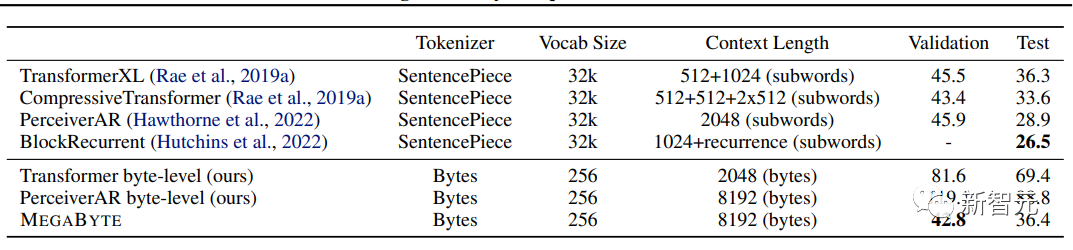
#メガバイトは他のモデルをはるかに上回り、サブワードでトレーニングされた sota モデルと競合する結果を提供します
In比較すると、OpenAI の GPT-4 には 32,000 トークンの制限があり、Anthropic の Claude には 100,000 トークンの制限があります。
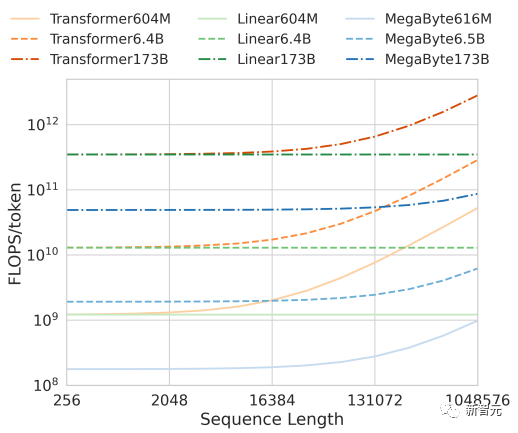
さらに、計算効率の観点から、固定モデル サイズとシーケンス長の範囲内で、メガバイトは同じサイズのトランスフォーマーや線形トランスフォーマーよりも使用するトークンの数が少なく、同じ計算コストが可能です。 . より大きなモデルを使用してください。
これらの改善により、同じ計算予算の下でトレーニングできるようになります。 、非常に長いシーケンスに拡張し、デプロイメント中のビルド速度を向上させる、よりパフォーマンスの高いモデル。
未来はどのようなものになるでしょうかAIの軍拡競争が本格化する中、モデルのパフォーマンスはますます強化され、パラメータはますます高くなっています。
GPT-3.5 は 175B のパラメーターでトレーニングされましたが、より強力な GPT-4 は 1 兆のパラメーターでトレーニングされたと推測する人もいます。
OpenAI CEO のサム アルトマン氏も最近、戦略の変更を示唆しており、同社は大規模なモデルのトレーニングを放棄し、他のパフォーマンスの最適化に注力することを検討していると述べました。
彼は AI モデルの将来を iPhone チップに例えますが、ほとんどの消費者は元の技術仕様について何も知りません。
メタ研究者は、革新的なアーキテクチャが適切なタイミングで登場すると信じていますが、他の最適化方法があることも認めています。
たとえば、パッチ技術を使用したより効率的なエンコーダ モデル、シーケンスをより小さなブロックに分解し、シーケンスを圧縮トークンに前処理するデコード モデルなど、拡張することができます。既存の Transformer Architectural 機能を利用して次世代モデルを構築します。
元 Tesla AI ディレクターの Andrej Karpathy 氏もこの論文について意見を表明し、Twitter で次のように書いています。
これは非常に有望であり、大規模モデルでのトークン化を廃止し、長いバイト シーケンスの必要性を排除できることを誰もが期待しているはずです。
以上がトランスフォーマーよりも 40% 高速です。 Meta、計算能力損失の問題を解決する新しいメガバイトモデルをリリースの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7469
7469
 15
1376
52
77
11
19
29
15
1376
52
77
11
19
29

 世界で最も強力なオープンソース MoE モデルが登場。GPT-4 に匹敵する中国語機能を備え、価格は GPT-4-Turbo のわずか 1% 近くです
May 07, 2024 pm 04:13 PM
世界で最も強力なオープンソース MoE モデルが登場。GPT-4 に匹敵する中国語機能を備え、価格は GPT-4-Turbo のわずか 1% 近くです
May 07, 2024 pm 04:13 PM
従来のコンピューティングを超える能力を備えているだけでなく、より低コストでより効率的なパフォーマンスを実現する人工知能モデルを想像してみてください。これは SF ではありません。世界で最も強力なオープンソース MoE モデルである DeepSeek-V2[1] が登場しました。 DeepSeek-V2 は、経済的なトレーニングと効率的な推論の特徴を備えた強力な専門家混合 (MoE) 言語モデルです。これは 236B のパラメータで構成されており、そのうち 21B は各マーカーをアクティブにするために使用されます。 DeepSeek67B と比較して、DeepSeek-V2 はパフォーマンスが優れていると同時に、トレーニング コストを 42.5% 節約し、KV キャッシュを 93.3% 削減し、最大生成スループットを 5.76 倍に高めます。 DeepSeek は一般的な人工知能を研究する会社です
 AI が数学研究を破壊する!フィールズ賞受賞者で中国系アメリカ人の数学者が上位 11 件の論文を主導 | テレンス・タオが「いいね!」しました
Apr 09, 2024 am 11:52 AM
AI が数学研究を破壊する!フィールズ賞受賞者で中国系アメリカ人の数学者が上位 11 件の論文を主導 | テレンス・タオが「いいね!」しました
Apr 09, 2024 am 11:52 AM
AI は確かに数学を変えつつあります。最近、この問題に細心の注意を払っている陶哲軒氏が『米国数学協会会報』(米国数学協会会報)の最新号を送ってくれた。 「機械は数学を変えるのか?」というテーマを中心に、多くの数学者が意見を述べ、そのプロセス全体は火花に満ち、ハードコアで刺激的でした。著者には、フィールズ賞受賞者のアクシャイ・ベンカテシュ氏、中国の数学者鄭楽軍氏、ニューヨーク大学のコンピューター科学者アーネスト・デイビス氏、その他業界で著名な学者を含む強力な顔ぶれが揃っている。 AI の世界は劇的に変化しています。これらの記事の多くは 1 年前に投稿されたものです。
 MLP に代わる KAN は、オープンソース プロジェクトによって畳み込みまで拡張されました
Jun 01, 2024 pm 10:03 PM
MLP に代わる KAN は、オープンソース プロジェクトによって畳み込みまで拡張されました
Jun 01, 2024 pm 10:03 PM
今月初め、MIT やその他の機関の研究者らは、MLP に代わる非常に有望な代替案である KAN を提案しました。 KAN は、精度と解釈可能性の点で MLP よりも優れています。また、非常に少数のパラメーターを使用して、多数のパラメーターを使用して実行する MLP よりも優れたパフォーマンスを発揮できます。たとえば、著者らは、KAN を使用して、より小規模なネットワークと高度な自動化で DeepMind の結果を再現したと述べています。具体的には、DeepMind の MLP には約 300,000 個のパラメーターがありますが、KAN には約 200 個のパラメーターしかありません。 KAN は、MLP が普遍近似定理に基づいているのに対し、KAN はコルモゴロフ-アーノルド表現定理に基づいているのと同様に、強力な数学的基礎を持っています。以下の図に示すように、KAN は
 こんにちは、電気アトラスです!ボストン・ダイナミクスのロボットが復活、180度の奇妙な動きにマスク氏も恐怖
Apr 18, 2024 pm 07:58 PM
こんにちは、電気アトラスです!ボストン・ダイナミクスのロボットが復活、180度の奇妙な動きにマスク氏も恐怖
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas は正式に電動ロボットの時代に突入します!昨日、油圧式アトラスが歴史の舞台から「涙ながらに」撤退したばかりですが、今日、ボストン・ダイナミクスは電動式アトラスが稼働することを発表しました。ボストン・ダイナミクス社は商用人型ロボットの分野でテスラ社と競争する決意を持っているようだ。新しいビデオが公開されてから、わずか 10 時間ですでに 100 万人以上が視聴しました。古い人が去り、新しい役割が現れるのは歴史的な必然です。今年が人型ロボットの爆発的な年であることは間違いありません。ネットユーザーは「ロボットの進歩により、今年の開会式は人間のように見え、人間よりもはるかに自由度が高い。しかし、これは本当にホラー映画ではないのか?」とコメントした。ビデオの冒頭では、アトラスは仰向けに見えるように地面に静かに横たわっています。次に続くのは驚くべきことです
 Google は大喜び: JAX のパフォーマンスが Pytorch や TensorFlow を上回りました! GPU 推論トレーニングの最速の選択肢となる可能性があります
Apr 01, 2024 pm 07:46 PM
Google は大喜び: JAX のパフォーマンスが Pytorch や TensorFlow を上回りました! GPU 推論トレーニングの最速の選択肢となる可能性があります
Apr 01, 2024 pm 07:46 PM
Google が推進する JAX のパフォーマンスは、最近のベンチマーク テストで Pytorch や TensorFlow のパフォーマンスを上回り、7 つの指標で 1 位にランクされました。また、テストは最高の JAX パフォーマンスを備えた TPU では行われませんでした。ただし、開発者の間では、依然として Tensorflow よりも Pytorch の方が人気があります。しかし、将来的には、おそらくより大規模なモデルが JAX プラットフォームに基づいてトレーニングされ、実行されるようになるでしょう。モデル 最近、Keras チームは、ネイティブ PyTorch 実装を使用して 3 つのバックエンド (TensorFlow、JAX、PyTorch) をベンチマークし、TensorFlow を使用して Keras2 をベンチマークしました。まず、主流のセットを選択します
 テスラのロボットは工場で働く、マスク氏:手の自由度は今年22に達する!
May 06, 2024 pm 04:13 PM
テスラのロボットは工場で働く、マスク氏:手の自由度は今年22に達する!
May 06, 2024 pm 04:13 PM
テスラのロボット「オプティマス」の最新映像が公開され、すでに工場内で稼働可能となっている。通常の速度では、バッテリー(テスラの4680バッテリー)を次のように分類します:公式は、20倍の速度でどのように見えるかも公開しました - 小さな「ワークステーション」上で、ピッキング、ピッキング、ピッキング:今回は、それがリリースされたハイライトの1つビデオの内容は、オプティマスが工場内でこの作業を完全に自律的に行い、プロセス全体を通じて人間の介入なしに完了するというものです。そして、オプティマスの観点から見ると、自動エラー修正に重点を置いて、曲がったバッテリーを拾い上げたり配置したりすることもできます。オプティマスのハンドについては、NVIDIA の科学者ジム ファン氏が高く評価しました。オプティマスのハンドは、世界の 5 本指ロボットの 1 つです。最も器用。その手は触覚だけではありません
 FisheyeDetNet: 魚眼カメラに基づいた最初のターゲット検出アルゴリズム
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: 魚眼カメラに基づいた最初のターゲット検出アルゴリズム
Apr 26, 2024 am 11:37 AM
目標検出は自動運転システムにおいて比較的成熟した問題であり、その中でも歩行者検出は最も初期に導入されたアルゴリズムの 1 つです。ほとんどの論文では非常に包括的な研究が行われています。ただし、サラウンドビューに魚眼カメラを使用した距離認識については、あまり研究されていません。放射状の歪みが大きいため、標準のバウンディング ボックス表現を魚眼カメラに実装するのは困難です。上記の説明を軽減するために、拡張バウンディング ボックス、楕円、および一般的な多角形の設計を極/角度表現に探索し、これらの表現を分析するためのインスタンス セグメンテーション mIOU メトリックを定義します。提案された多角形モデルの FisheyeDetNet は、他のモデルよりも優れたパフォーマンスを示し、同時に自動運転用の Valeo 魚眼カメラ データセットで 49.5% の mAP を達成しました。
 Llama 70B を実行するシングル カードはデュアル カードより高速、Microsoft は FP6 を A100 オープンソースに強制導入
Apr 29, 2024 pm 04:55 PM
Llama 70B を実行するシングル カードはデュアル カードより高速、Microsoft は FP6 を A100 オープンソースに強制導入
Apr 29, 2024 pm 04:55 PM
FP8 以下の浮動小数点数値化精度は、もはや H100 の「特許」ではありません。 Lao Huang は誰もが INT8/INT4 を使用できるようにしたいと考え、Microsoft DeepSpeed チームは NVIDIA からの公式サポートなしで A100 上で FP6 の実行を開始しました。テスト結果は、A100 での新しい方式 TC-FPx の FP6 量子化が INT4 に近いか、場合によってはそれよりも高速であり、後者よりも精度が高いことを示しています。これに加えて、エンドツーエンドの大規模モデルのサポートもあり、オープンソース化され、DeepSpeed などの深層学習推論フレームワークに統合されています。この結果は、大規模モデルの高速化にも即座に影響します。このフレームワークでは、シングル カードを使用して Llama を実行すると、スループットはデュアル カードのスループットの 2.65 倍になります。 1つ
