

本物の人があなたに心からのハグをしてくれないとき、ロボットが行動を起こします

エモい瞬間は誰にでもありますが、誰もがハグしてくれる人を見つけられるわけではありません。
この問題点は科学者のアレクシス・ブロック氏(以下、ブロック)も指摘していました。 2017年から、彼女はロボットにハグを教える方法を研究している。彼女はその後、37人のノーベル賞受賞者を輩出してきたドイツの有名な「マックス・プランク学校」の会員となった。
このプロジェクトはそれほど簡単ではありません。彼らはこのロボットを 6 年間作っているので、寒くないし、 は非常に人間的です:
- 人が近づくと腕を上げて「ハグしてもいいですか?」と熱心に尋ねます;
- 相手の身長に合わせて最適なハグを調整します。また、さまざまな「握る」強さを調整して、より愛情深いハグを行うこともできます。 さまざまな抱きしめ姿勢にも対応できます。たとえば、人々がしばらくつかまりたい場合、それを理解して事前にロボット アームを放しません...
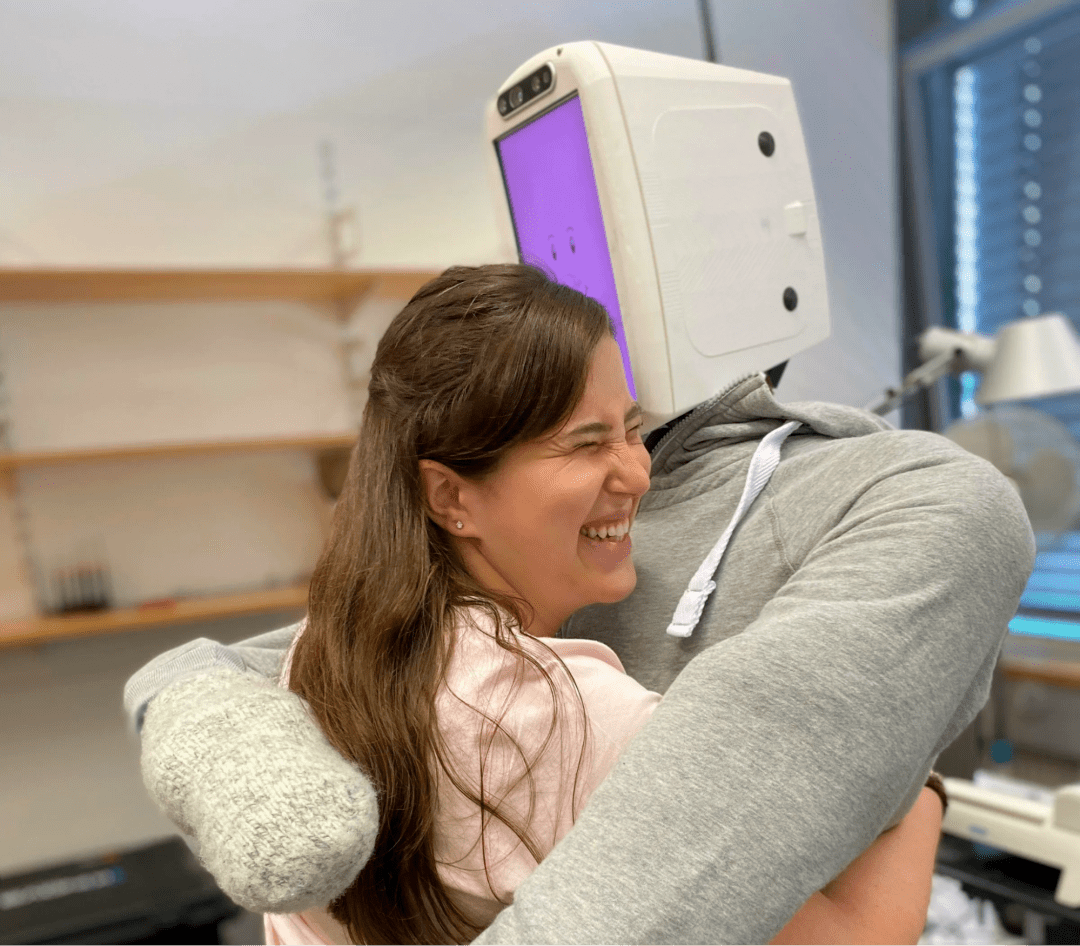
それは、予備実験に参加した人々がそれを「それ」と呼ぶことさえしたくないほどに現実的です。
さらにすごいのは、ロボットに抱きしめられたときの感触について全員が話すと、「恋人に抱きしめられた」「母親に抱きしめられて安心した」など、具体的な答えが返ってきました。 「葬儀に出席する」「遠い親戚」「サッカーの試合で会った友人」、さらには「元恋人を抱きしめるようなもの」とさえ言う人もいました。この感情的な対応の違いは、その時の人々の心理状態や、各試行におけるロボットのハグの動作や程度に関係しています。

なぜマックス・プランク研究所はロボットにハグを教えるのでしょうか?
人間は肌と肌の触れ合いを求めます。
私たちは幼いころから両親に迎えられて以来、人々は他人との密接な接触を持ち始めました。愛撫され、ハグされ、マッサージされるとホルモンが放出され、ストレスや不安が大幅に軽減され、心拍数や心拍数が減少します。血圧。
特に3秒以上続く密着ハグは、「ディーププレッシャータッチ」とも呼ばれ、スキンシップの快感を高めます。
人は「生き残るためには1日4回ハグする必要があり、心身の健康のためには少なくとも8回ハグする必要がある。」 アメリカの著名な心理療法士、ヴァージニア・サティアは「4回のハグ」理論を提唱しました。
でも、いつも付き添ってくれる人がいるとは限らないので、キルトにくるまって自分で「深い圧タッチ」を実現することもできます。
人々は、テクノロジーが仲間との絆や快適さの空白を埋めることができると期待しています。
たとえば、あるチームは触覚情報を受信できる電子リストバンドを作成しました。携帯電話の Bluetooth に接続すると、1 人がクリックして情報を送信すると、もう 1 人の手のリストバンドが絞られて振動します。

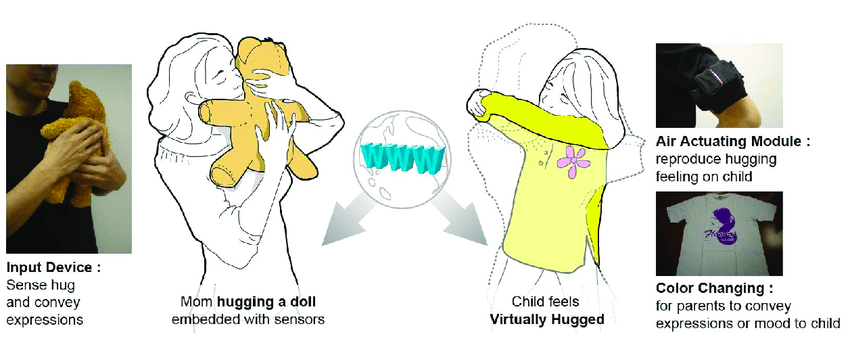
HuggieBot の開発者は、人はハグに対して、特に「タッチ位置」と「接触強度」の点で特に敏感であることを発見しました。
二人の感情が近ければ近いほど、より多くの領域に触れることを許可されますが、親密でない人にとって、間違った姿勢でハグすると「攻撃的」になるだけでなく、ハグの強さも不十分で、おざなりなようで、力を入れすぎると相手を傷つけてしまいます。そして、この激しさの感覚は人によって異なる必要があります。
つまり、ハグシャツなどの発明はまだ、十分に暖かく本物のハグを取り戻すことができていないのです。
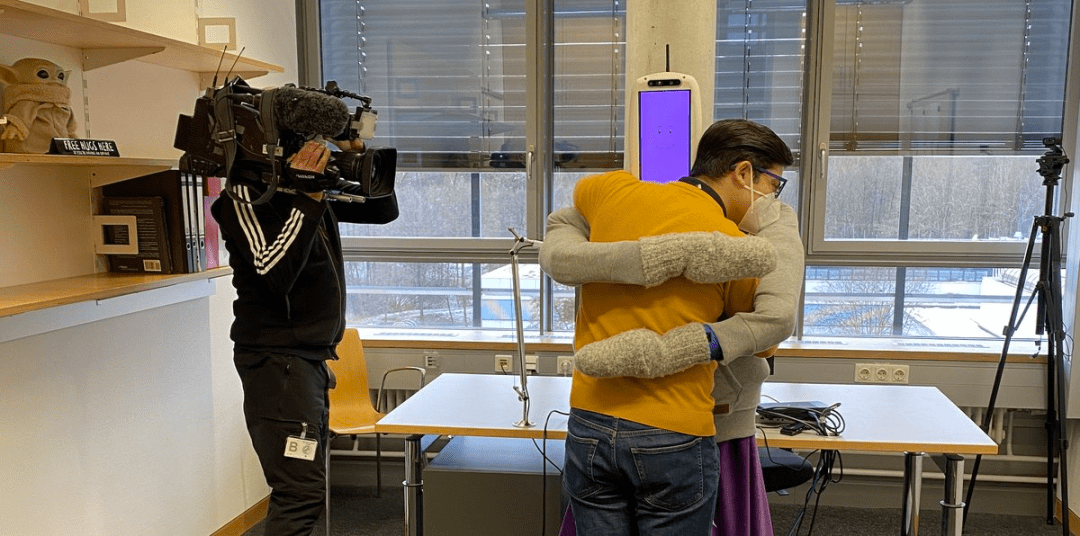
特に感染症の流行を経験した後、人々の感情的なつながりは距離や障害の中でより脆弱になり、より強く抱き合いたいと願うようになりました。 HuggieBot の主要な創設メンバーである Block 氏は、
このロボットを開発する目的は、特に感染症の影響で社会的に距離を置かれている人々を慰めるために、高度に擬人化された温かいハグを送信するためにロボットを使用することであると述べました。
「完璧なハグ」をするのは簡単ではありません
ハグの快適さを改善するにはどうすればよいですか? この種のことを受け入れるには謎が多すぎますが、科学者は依然としてそれを定量化したいと考えています。
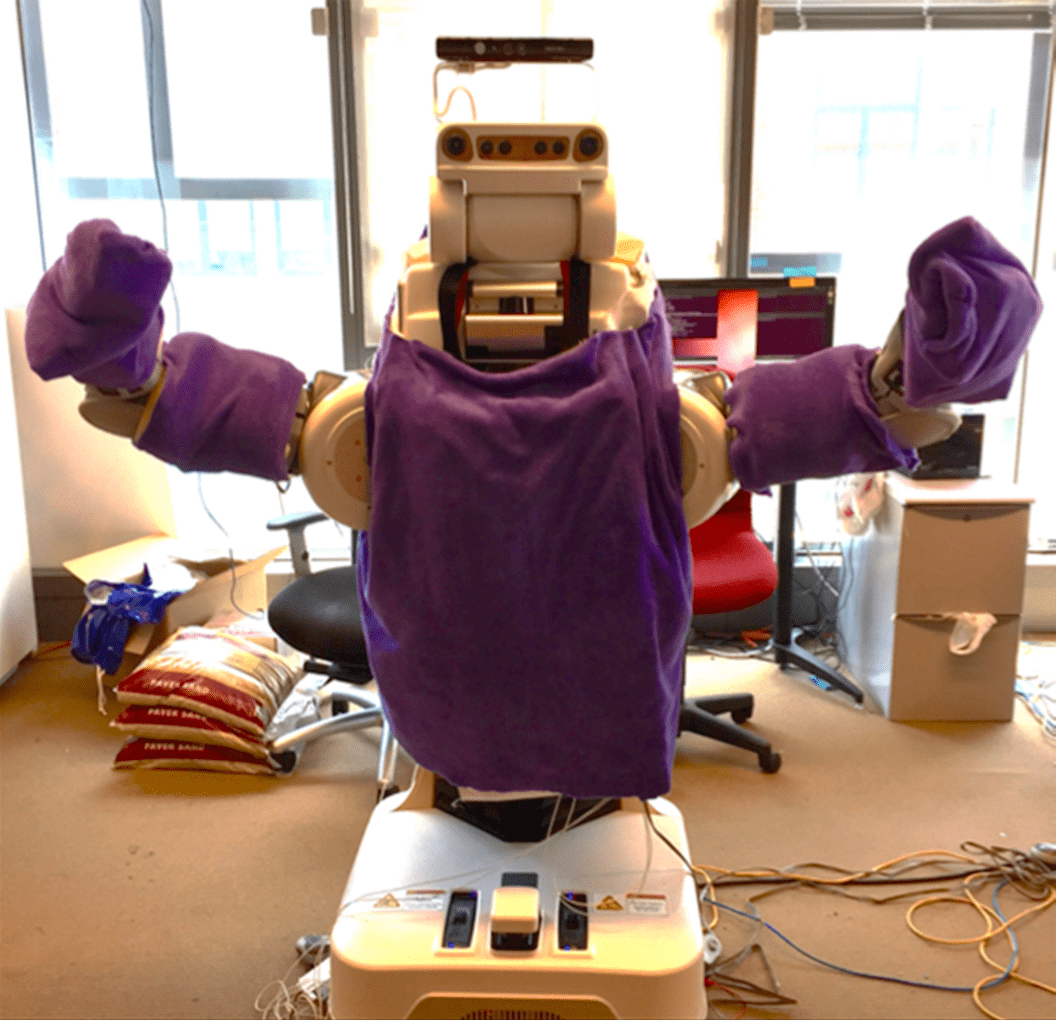
2017 年、チームは最初の試みを開始し、非常に粗末な外観のロボットを作成し、合計 12 種類の異なるハグをデザインしました。
試作ロボットの 2 本の腕と胴体は厚いフォームと綿で包まれています
次に、彼らは 30 人のボランティアを見つけ、各人に 12 回のハグをするようロボットに依頼しました。ハグの持続時間は長くなったり短くなったり、姿勢も異なりました。
予想外なことに、ロボットの重さは 450 ポンド、身長は人間とほぼ同じであったにもかかわらず、誰も抑圧されず、恐怖のために逃げる人もいませんでした。
それどころか、多くの人が「ロボットを抱きしめるのがとても楽しいです。その経験は斬新で驚くべきことではないからです。」これらの肯定的なフィードバックは、ブロックと彼女のチームを勇気づけました。ロボットは本物の人間よりも上手にハグをしてくれますか?」
そこで彼らはまず、最初期 (1992 年) で最も有名な Temple Grandin 押出機から始めて、市場にあるいくつかのロボットを調査しました。
その後、これに基づいて動物を模した製品が派生しましたが、これは単に「ユーザーフレンドリー」になっただけです。
これに基づいて、Bullock たちは初代 HuggieBot を作成しました。ロボットを紫色の厚い綿で包むことに加えて、HuggieBot を柔らかく十分に暖かくするためにさまざまな発熱体も使用しました。
彼らはまた、ロボットをより自律的にするという、もう一歩前進したいと考えています。
そこで、彼らはロボットの背中に触覚センサーを追加しました。これらのセンサーは伸ばすことができ、ユーザーがいつ接触を開始するのか、いつハグを終了したいのかを検出することができ、それによってロボットがハグをどれだけ長く与えるべきかを予測することができます。 user.「ぎゅっと」ハグ。
人はハグの始まりと終わりに特に敏感です。 特に、ユーザーがリリースの準備ができていることを示したら、すぐにリリースしてください。リリースが早すぎても遅すぎても、ユーザーは不満を抱きます。
つまり、現状ではこの触覚センサーだけでは十分ではありません。そこで彼らは、視覚と触覚を同時に使用してハグを提供する業界初のスマート デバイスである HuggieBot 2.0 の開発を開始しました。
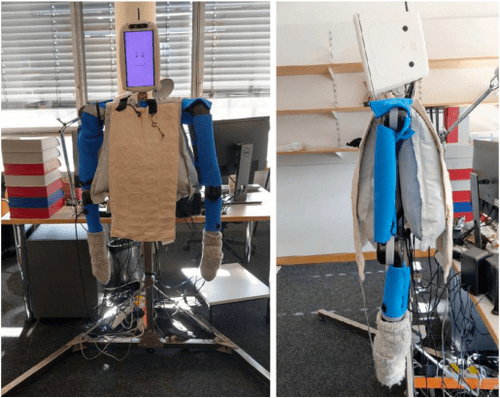 上の写真にある四角くてかわいい頭は、実はたくさんの知識を持っています。これはカスタムメイドの 3D プリント ボックスで、ロボット全体を制御する Dell OptiPlex 7050 マイクロコンピューター、Intel RealSense 深度センシング カメラ、ロボットの顔、スクリーン、小さなスピーカー、そしてたくさんのケーブル。
上の写真にある四角くてかわいい頭は、実はたくさんの知識を持っています。これはカスタムメイドの 3D プリント ボックスで、ロボット全体を制御する Dell OptiPlex 7050 マイクロコンピューター、Intel RealSense 深度センシング カメラ、ロボットの顔、スクリーン、小さなスピーカー、そしてたくさんのケーブル。
下部にV字型の台座があり、近づいて抱きつきやすくなっています。本体には、空気圧センサーとマイクアンプを備えた HiggieChest と呼ばれるカスタムメイドのセンシングシステムも搭載されています。
簡単に言えば、
これにより、ユーザーのハグタッチがロボットの全身に素早く伝わり、素早い反応がしやすくなります。同時に、ロボットがさまざまな人の体型に合わせて動きを調整できるようにし、抱きつきに来るユーザーによる金属製のアームの損傷を防ぐために、
ロボットアームは次のように設定されています。とても敏感で興味深くなります。
 まず第一に、ロボット アームの各関節トルクには最大しきい値があり、それを超えると動きを停止します。これらのアームは非常に柔軟で敏感なので、ユーザーは簡単に切り離すことができます。ハグを終了して切り離すだけで、ハグをやめて「もう十分です」という信号をロボットに直接送信します。
まず第一に、ロボット アームの各関節トルクには最大しきい値があり、それを超えると動きを停止します。これらのアームは非常に柔軟で敏感なので、ユーザーは簡単に切り離すことができます。ハグを終了して切り離すだけで、ハグをやめて「もう十分です」という信号をロボットに直接送信します。
人々はハグ以上のものをロボットに期待し始めています
ブロック氏は実験で32人のユーザーから合計512件のハグデータを収集し、興味深い現象を発見した。
データ収集の正確性を確保するために、研究チームは被験者に対し、1 回の抱擁で撫でる、握るなどの 1 つの動作のみを実行するように具体的に指示しました。
しかし、研究室のビデオを通じて、参加者 32 人のうち 7 人がさまざまなジェスチャーを無意識のうちに組み合わせていることがわかりました。こすることとたたくことを組み合わせる人もいれば、ロボットをしっかりと抱きしめた後、少し手を離してロボットの肩を軽くたたく人もいます。
単純なハグに加えて、人々は徐々にロボットに対してより感情的な期待を投影しているようです。
ユーザーからのフィードバックの中で、Bullock 氏は を見つけてさらに驚きました。プログラムが設定した「完璧なハグ角度とプロセス」と比較して、ユーザーは実際にはロボットが自分の動きに基づいて「即興」反応を行うことを好みます。
78.13% の参加者は、このような反応をするとロボットがより元気で本物であると感じ、相手に理解されていると感じると回答しました。現在のモーションフィードバックは完成していますが、あまりにも機械的であり、人間がロボットと人間に同じような感情的投資を感じることはありません。
そこで、最新バージョンである HuggieBot 3.0 では、チームはロボットが「受動的な応答」と「能動的な応答」を提供できるように設定しました。
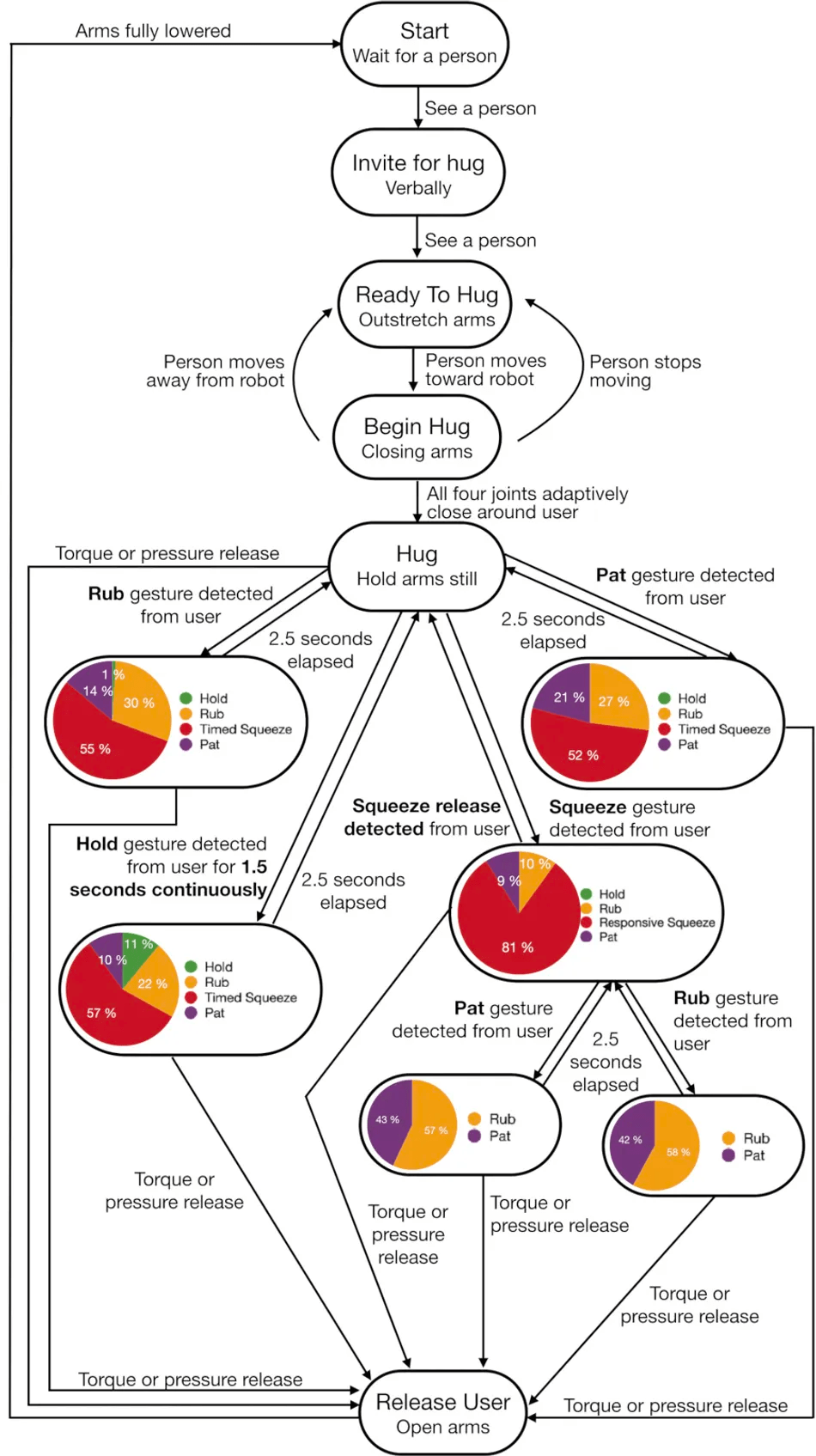
簡単に言えば、ロボットは、ユーザーがハグの姿勢を維持するだけでなく、撫でたり、絞ったり、撫でたりしていることを検出すると、確率に基づいて異なる反応を示し、フィードバックを返します。
ロボットは、これらのジェスチャを一度にまたは連続して複数回、辛抱強く繰り返すことができます。これは多くの現実の人々よりもはるかに優れているのではないでしょうか?
しかし、人々が他の行動をとらずにただ長時間抱き合っていると、ロボットは約 1.5 秒の間隔で「能動的な反応」を引き起こします。
つまり、ハグは簡単なようですが、手放すのは難しいのです。インタラクションも適切に制御する必要があります。
これまでのところ、Bullock チームは、長年にわたる定量的調査を通じて、一連の「ゴールドスタンダードの採用」を要約してきました。
-
###柔らかい;###
- 温度付き;
- 体の大きさは大人と同じくらいです;
- 近づいてくる人を敏感に察知して誘う動作をする必要があり、ハグ動作もその人と同期する必要がある;
- ハグされる人が快適に感じられるよう、腕の位置を積極的に調整します。 ハグ中に相手が放った願望を素早く察知する;
- ハグ中のジェスチャーを認識する;
- これらのジェスチャーにはすぐに応答してください;
- それぞれの応答は少しずつ異なる必要があります;
- ハグのプロセス中、時にはあなたが率先して身振りで気遣いを表現する必要があります。
- 自分に問いかけてください。 誰かをハグするときに、こんなことをしたことがありますか?
現在、Bullock チームは第 4 世代のハグ ロボットの開発に集中的に取り組んでいます。現時点で自分を癒すためにロボットを購入できなくても、まずは使い方を学ぶことができます。
こうしてみると、誠実さは必ず勝つものです。 私たちに必要なのは「完璧なハグ」ではありません。必要なのは「誠実なハグ」です。
イースターエッグ
一部のユーザーがあまりにも関与しすぎて力を使いすぎるのを防ぐために、科学者たちはロボットに新しい胴体も与えました:端に沿ってヒートシールし、ヒートシールの上に HH-66 ビニール セメントを使用することで、強度と耐圧性が向上します。
前に誰かが私を強く抱きしめすぎたために、ロボットから空気が漏れてしまいました。
参考文献
[2] ロボットは良いハグをできるか? | Hackaday https://hackaday.com/2022/01/24/can-robots-give-good-hugs/
[3] HuggieBot 3.0 – ロボットは科学を利用して完璧なハグを提供します https://www.odditycentral.com/technology/huggiebot-3-0-robot-uses-science-to-deliver-the-perfect-hug .html
著者: リリアン
編集者:biu
特に明記されていない限り、写真は参考文献 [1] とそれに添付されているビデオのスクリーンショットからのものです
必要に応じて、sns@guokr.comにご連絡ください
以上が本物の人があなたに心からのハグをしてくれないとき、ロボットが行動を起こしますの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7469
7469
 15
1376
52
77
11
19
29
15
1376
52
77
11
19
29

 AI はどのようにロボットをより自律的で順応性のあるものにすることができるのでしょうか?
Jun 03, 2024 pm 07:18 PM
AI はどのようにロボットをより自律的で順応性のあるものにすることができるのでしょうか?
Jun 03, 2024 pm 07:18 PM
産業オートメーション技術の分野では、人工知能 (AI) と Nvidia という無視できない 2 つの最近のホットスポットがあります。元のコンテンツの意味を変更したり、コンテンツを微調整したり、コンテンツを書き換えたり、続行しないでください。「それだけでなく、Nvidia はオリジナルのグラフィックス プロセッシング ユニット (GPU) に限定されていないため、この 2 つは密接に関連しています。」このテクノロジーはデジタル ツインの分野にまで広がり、新たな AI テクノロジーと密接に関係しています。「最近、NVIDIA は、Aveva、Rockwell Automation、Siemens などの大手産業オートメーション企業を含む多くの産業企業と提携に至りました。シュナイダーエレクトリック、Teradyne Robotics とその MiR および Universal Robots 企業も含まれます。最近、Nvidiahascoll
 正規表現を使用してPHP配列から重複した値を削除します
Apr 26, 2024 pm 04:33 PM
正規表現を使用してPHP配列から重複した値を削除します
Apr 26, 2024 pm 04:33 PM
正規表現を使用して PHP 配列から重複値を削除する方法: 正規表現 /(.*)(.+)/i を使用して、重複値を照合して置換します。配列要素を反復処理し、preg_match を使用して一致をチェックします。一致する場合は値をスキップし、一致しない場合は重複値のない新しい配列に追加します。
 Cloud Whale Xiaoyao 001 の掃除と掃き掃除ロボットには「頭脳」があります。 | 経験
Apr 26, 2024 pm 04:22 PM
Cloud Whale Xiaoyao 001 の掃除と掃き掃除ロボットには「頭脳」があります。 | 経験
Apr 26, 2024 pm 04:22 PM
掃除ロボットやモップ拭きロボットは、近年消費者の間で最も人気のあるスマート家電製品の 1 つです。操作の利便性、あるいは操作の必要がないことで、怠け者は手を解放し、消費者は日常の家事から「解放」され、好きなことにもっと時間を費やすことができるようになり、生活の質が向上します。この流行に乗って、市場に出回っているほぼすべての家電ブランドが独自の掃除ロボットや拭き掃除ロボットを製造しており、掃除ロボット市場全体が非常に活発になっています。しかし、市場の急速な拡大は必然的に隠れた危険をもたらします。多くのメーカーがより多くの市場シェアを急速に占有するために機械の海戦術を使用し、その結果、アップグレードポイントのない多くの新製品が生まれるとも言われています。まさに「マトリョーシカ」モデルです。ただし、すべての掃除ロボットやモップロボットがそうであるわけではありません。
 中国語会話にも対応!新しい NVIDIA ChatRTX が更新されました
Jun 09, 2024 am 11:25 AM
中国語会話にも対応!新しい NVIDIA ChatRTX が更新されました
Jun 09, 2024 am 11:25 AM
2 月には NVIDIA が LLM ベースのチャットボット ChatwithRTX をリリースしました。 5月にチャットボットがアップデートされ、新モデルや新機能が追加され、パッケージパッケージも35Gから11Gに削減され、ソフトウェアの名前が正式にChatRTXに変更されました。 ChatwithRTX に関する前回の記事とビデオで、ChatwithRTX には独自の中国語の返信がないことを述べました。中国語の回答を実装したい場合は、独自の環境や大規模な言語モデルなどをインストールする必要があります。しかし、このステップはユーザーにとって敷居が比較的高く、中国語の質問と回答を実現するには多くの複雑なステップを経る必要があります。紹介の前に、ChatRTX とは何かについて簡単に説明します。
 中国科学技術大学ヒューマノイドロボット研究所が公開され、長江デルタヒューマノイドロボット同盟の設立を発表
Jun 19, 2024 pm 12:59 PM
中国科学技術大学ヒューマノイドロボット研究所が公開され、長江デルタヒューマノイドロボット同盟の設立を発表
Jun 19, 2024 pm 12:59 PM
本サイトは6月18日、今朝、中国科学技術大学の人工知能・ヒューマノイドロボットフロンティアフォーラムが同校のハイテクパークで開催されたと報じた。中国科学技術大学の人工知能・データサイエンス学部とヒューマノイドロボット研究所が相次いで発表され、中国科学院院士の丁漢氏が科学・研究部長に任命された。ヒューマノイドロボット研究所の技術委員会は、長江デルタヒューマノイドロボットアライアンスの設立を発表した。 USTC のヒューマノイド ロボット研究所は、USTC の学際的な利点を活用し、インテリジェント分野における USTC の開発を促進するために、材料センシング、構造作動、運動制御、および身体化インテリジェンスの方向における技術的ブレークスルーに努めることに取り組んでいます。ロボット。当研究所は、今後も技術革新を踏まえ、サービス、医療、教育等の分野への人型ロボットの活用を積極的に推進していきます。
 プログラミングは何のためにあるのか、それを学ぶと何の役に立つのか?
Apr 28, 2024 pm 01:34 PM
プログラミングは何のためにあるのか、それを学ぶと何の役に立つのか?
Apr 28, 2024 pm 01:34 PM
1. プログラミングは、Web サイト、モバイル アプリケーション、ゲーム、データ分析ツールなど、さまざまなソフトウェアやアプリケーションの開発に使用できます。その応用分野は非常に幅広く、科学研究、医療、金融、教育、エンターテイメントなど、ほぼすべての業界をカバーしています。 2. プログラミングを学ぶことは、問題解決スキルと論理的思考スキルを向上させるのに役立ちます。プログラミング中、問題を分析して理解し、解決策を見つけてコードに変換する必要があります。この考え方は、分析能力と抽象能力を養い、実際的な問題を解決する能力を向上させることができます。
 現実版ウォーリー、ディズニーが新しい二足歩行ロボットを実演:坂道や段差などの複雑な地形を移動可能
Jul 20, 2024 pm 06:31 PM
現実版ウォーリー、ディズニーが新しい二足歩行ロボットを実演:坂道や段差などの複雑な地形を移動可能
Jul 20, 2024 pm 06:31 PM
このウェブサイトは7月20日、ディズニーの研究チームがテーマパーク内の坂道や段差などの非構造化された地形を横断できる新しい二足歩行ロボットを設計・製造したと報じた。このサイトに関する注記: ビデオのソースは Disney で、Turkey Brothers によって Station B にアップロードされています。Disney は、この二足歩行ロボット プロジェクトを通じて、手続き型アニメーション、モジュール式ハードウェア、強化学習を組み合わせて、これらのユニークな歩行ができるロボットを設計およびプログラムできることを望んでいます。特徴的な歩行キャラクター。この二足歩行ロボットは、2008 年の映画「ウォーリー」の主人公ウォーリーに似ていますが、平らな頭と箱状の体を持っています。画像出典: WikiMedia ディズニーは、プロジェクトの設計の焦点はキャラクター主導の機械特性にあり、堅牢に実行するための強化学習に基づく制御アーキテクチャを提案していると述べました。
 LeCun の新作: 階層化ワールド モデル、データ駆動型ヒューマノイド ロボット制御
Jun 13, 2024 am 11:37 AM
LeCun の新作: 階層化ワールド モデル、データ駆動型ヒューマノイド ロボット制御
Jun 13, 2024 am 11:37 AM
大型モデルの知性の恩恵により、人型ロボットが新たなトレンドとなっています。 SF映画に出てくる「自分が人間ではないことが分かる」ロボットが近づいてきているようだ。しかし、人間のように考え、行動することは、ロボット、特に人型ロボットにとって依然として難しい工学的問題です。単純な歩行学習を例に挙げると、強化学習を使った訓練は次のように発展する可能性があります。原理的には問題はなく(報酬メカニズムに従い)、階段を上るという目的はプロセスを除いて達成されています。比較的抽象的であり、ほとんどの人間とは行動パターンが異なる場合があります。ロボットが人間のように「自然に」行動することが難しい理由は、観察と行動の空間が高次元であることと、二足歩行の形態が本来持つ不安定性によるものです。この点に関して、LeCun は次のことに参加しました。
