

トップ号を発行しました!山東大学の李宜斌教授のチームは、シンプルで機動性の高い車輪脚複合ロボットを開発した

人類は古来より、さまざまな荒野に適応できる移動機構の開発を夢見てきました。 車輪付き移動プラットフォームは、優れた動作安定性と動作効率を備えていますが、険しい地形での移動が困難です。脚式ロボットは、優れた地形適応性と動作柔軟性を備えていますが、動作の安定性とエネルギー効率が必要です。改善されるべきです。
車輪の動きと脚と足の動きの利点を組み合わせるために、車輪と脚の複合運動機構が誕生しました。 一般的な車輪と脚の複合機構には、主に特殊な形状の車輪 (RHex など)、スポーク車輪 (Wheg など)、変形車輪 (OmniWheg など)、一連の車輪脚 (Wheeled-ANYmal など) などが含まれます。 . 図 X に示すように。
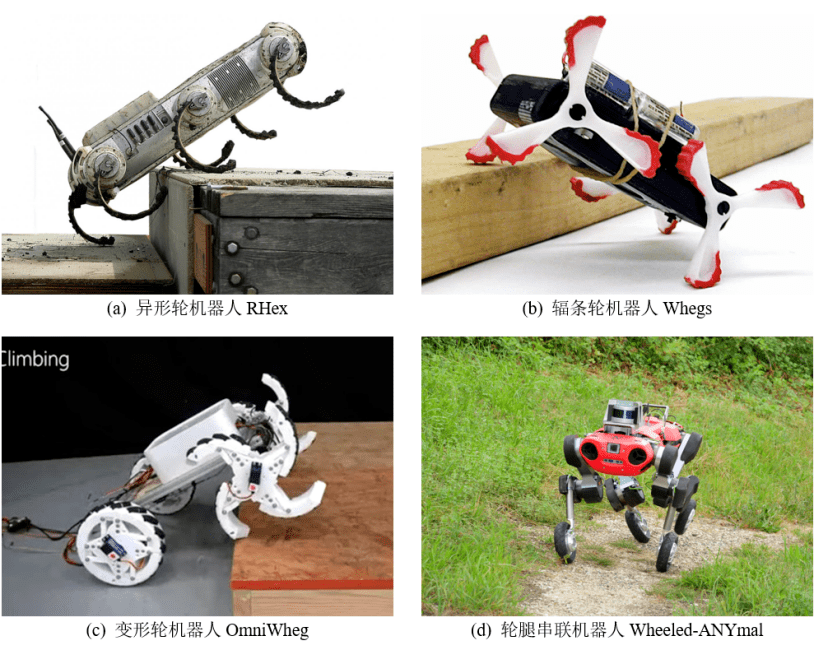
図1 一般的な車輪脚複合ロボット
最近、山東大学の李宜斌教授、日本の立命館大学の馬秀根教授、中国科学院瀋陽オートメーション研究所の劉金國教授、そして志江研究所の孔玲宇准研究員のチームが、 Q-Whex と名付けられた新しいタイプの車輪脚複合ロボットを開発しました。 を図 2 に示します。
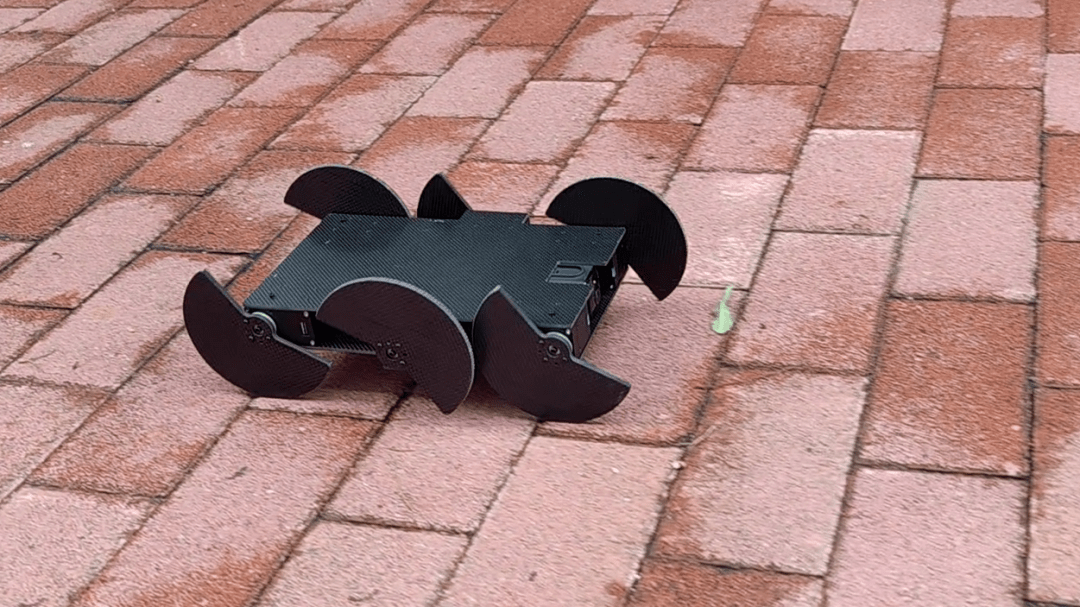
図 2 Q-Whex ロボット
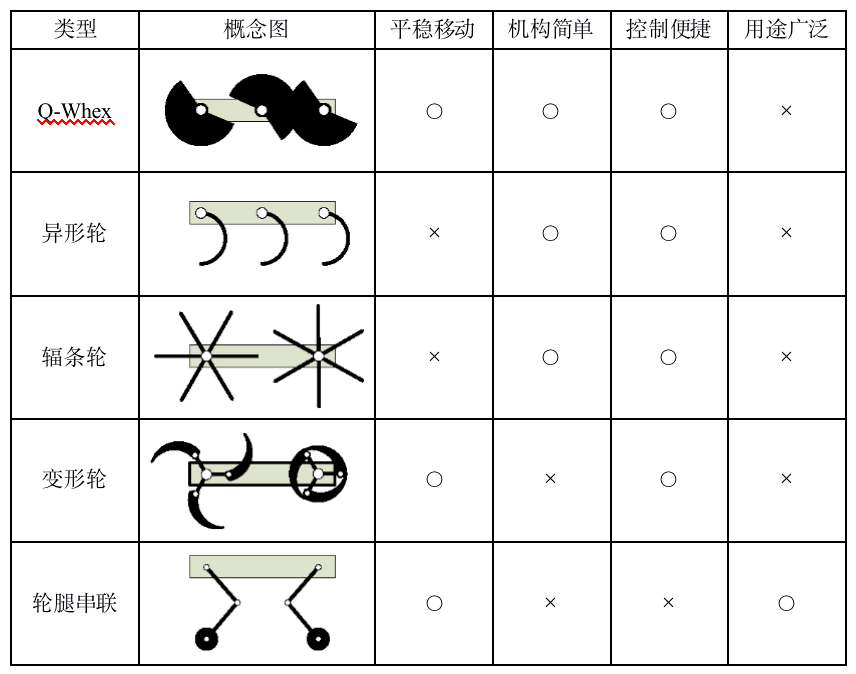
Q-Whex は、車輪付き移動プラットフォームのように平らな地面をスムーズに移動でき、足付きロボットのようにシャーシの高さよりも高い障害物を乗り越えることができます。表 1 に示すように、Q-Whex は他の車輪脚複合移動ロボットと比較して、動作の滑らかさ、機構の複雑さ、制御の難易度の点で優れています。
表1 Q-Whexと他の車輪脚複合移動ロボットの比較
▍シンプルな機構と便利な制御
論文に示されている Q-Whex ロボットは長さ 277.5 mm、幅 204.8 mm、高さ 39.5 mm、自重は 2.4 kg、荷重 2.65 kg で前進速度 0.44 m/s に達します。 。 Q-Whex は、本体と 6 つの同型扇形半輪駆動システムで構成されています。制御回路、IMU、バッテリー、カメラを胴体内部に集積、車輪脚構造の駆動モーターも胴体内部に配置、各半輪は210°の扇形構造とし、モーターの出力軸を配置扇形の中心に接続して回転を実現 扇形の場合 円弧のエッジが地面に接触すると車輪移動となり、扇形のエッジが地面に接触すると脚型の障害物を乗り越える効果が得られます。Q-Whex の製造と組み立ては、図 3 に示すように非常に簡単です。モーターと胴体の内部のコンポーネントは 2 枚のカーボンファイバー プレートの間に取り付けられ、扇形の各半ホイールもカーボンファイバー プレートで作られています。 。

Q-Whex のモーションコントロールも非常に簡単で、それぞれの扇形半輪が連続的に回転し、左扇形半輪と右扇形半輪の速度差を制御することでステアリングを実現します。ロボットの各扇形半輪の回転角度を制御することで、それらの位相差により異なる歩容を生成することができます。図 4 は、Q-Whex の 4 つの典型的な歩行を示しています。
▍車輪と脚の組み合わせ、障害物を登って乗り越える
Q-Whex は、図 5 に示すように、三角形の歩行を採用しており、車輪付き移動プラットフォームのように平坦な地面をスムーズに移動できます。

Q-Whex は、図 6 に示すように、雪、氷、砂利、その他の表面も簡単に処理できます。

図 7 に示すように、対称的な歩行を使用すると、32 度の坂道を上り下りできます。

図 7 32 度の斜面上の Q-Whex
図 8 に示すように、連続した段差を登ることができます。
図 8 Q-Whex が連続する階段を登る
図 9 に示すように、さまざまな起伏の多い地形は問題になりません。
図 9 険しい地形を走行する Q-Whex
▍左右対称の構成で転倒の心配なし
Q-Whex ロボットの構造設計は、前後・左右・上下の 3 方向に対称な構成を採用しているため、動作中に前後・前後の区別がありません。 。走行中にロボットが誤って横転しても、「バックサイドアップ」構成で前進を続けることができるため、複雑な環境の動きにおけるリスクや事故に対する優れた保険と耐障害性を備えています。図 10 は、ロボットが上昇プロセス中に転倒し、その後「バックアップ」姿勢で上昇を完了したことを示しています。
図 10 Q-Whex は横転後も走行を続けることができます
▍空中カメラ、遠隔検出
Q-Whex ロボットには小型カメラ装置が取り付けられており、収集した画像を WiFi または 4G ネットワーク経由で遠隔オペレーターにリアルタイムで送信できます。したがって、図 11 に示すように、Q-Whex は無人検出タスクを実行できます。
図 11 Q-Whex は遠隔検出に航空機搭載カメラを使用できます
図 12 に示すように、リモートで猫をからかうこともできます。
写真 12 Q-Whex と猫
Q-Whex は本質的に新しい車輪と脚の複合モビリティのコンセプトであり、その高い操縦性と強力な通過性は、独立して駆動される 6 つの扇形の半車輪の連続回転と相互位相調整によって得られます。 この概念は、産業検査、物流輸送、現場検出などに必要なモバイル プラットフォームに適用できます。実際のアプリケーション要件に応じて、適切な構成とサイズを選択する必要があります。 ロボットは複雑な認識や制御戦略を採用する必要がなく、構造と制御が単純であるためシステムの堅牢性と信頼性が向上します。
論文の筆頭著者は山東大学の准研究員 Zhang Guoteng です。電子メール:
guoteng@email.sdu.edu.cn。
論文リンク:
https://doi.org/10.1002/rob.22186
以上がトップ号を発行しました!山東大学の李宜斌教授のチームは、シンプルで機動性の高い車輪脚複合ロボットを開発したの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7748
7748
 15
1643
14
1397
52
1291
25
1234
29
15
1643
14
1397
52
1291
25
1234
29

 二代目アメカ登場!彼は観客と流暢にコミュニケーションをとることができ、表情はよりリアルで、数十の言語を話すことができます。
Mar 04, 2024 am 09:10 AM
二代目アメカ登場!彼は観客と流暢にコミュニケーションをとることができ、表情はよりリアルで、数十の言語を話すことができます。
Mar 04, 2024 am 09:10 AM
人型ロボット「アメカ」が第二世代にバージョンアップ!最近、世界移動通信会議 MWC2024 に、世界最先端のロボット Ameca が再び登場しました。会場周辺ではアメカに多くの観客が集まった。 GPT-4 の恩恵により、Ameca はさまざまな問題にリアルタイムで対応できます。 「ダンスをしましょう。」感情があるかどうか尋ねると、アメカさんは非常に本物そっくりの一連の表情で答えました。ほんの数日前、Ameca を支援する英国のロボット企業である EngineeredArts は、チームの最新の開発結果をデモンストレーションしたばかりです。ビデオでは、ロボット Ameca は視覚機能を備えており、部屋全体と特定のオブジェクトを見て説明することができます。最も驚くべきことは、彼女は次のこともできるということです。
 2か月後、人型ロボットWalker Sが服をたたむことができるようになった
Apr 03, 2024 am 08:01 AM
2か月後、人型ロボットWalker Sが服をたたむことができるようになった
Apr 03, 2024 am 08:01 AM
Machine Power Report 編集者: Wu Xin 国内版の人型ロボット + 大型模型チームは、衣服を折りたたむなどの複雑で柔軟な素材の操作タスクを初めて完了しました。 OpenAIのマルチモーダル大規模モデルを統合したFigure01の公開により、国内同業者の関連動向が注目を集めている。つい昨日、中国の「ヒューマノイドロボットのナンバーワン株」であるUBTECHは、Baidu Wenxinの大型モデルと深く統合されたヒューマノイドロボットWalkerSの最初のデモを公開し、いくつかの興味深い新機能を示した。 Baidu Wenxin の大規模モデル機能の恩恵を受けた WalkerS は次のようになります。 Figure01 と同様に、WalkerS は動き回るのではなく、机の後ろに立って一連のタスクを完了します。人間の命令に従って服をたたむことができる
 AI はどのようにロボットをより自律的で順応性のあるものにすることができるのでしょうか?
Jun 03, 2024 pm 07:18 PM
AI はどのようにロボットをより自律的で順応性のあるものにすることができるのでしょうか?
Jun 03, 2024 pm 07:18 PM
産業オートメーション技術の分野では、人工知能 (AI) と Nvidia という無視できない 2 つの最近のホットスポットがあります。元のコンテンツの意味を変更したり、コンテンツを微調整したり、コンテンツを書き換えたり、続行しないでください。「それだけでなく、Nvidia はオリジナルのグラフィックス プロセッシング ユニット (GPU) に限定されていないため、この 2 つは密接に関連しています。」このテクノロジーはデジタル ツインの分野にまで広がり、新たな AI テクノロジーと密接に関係しています。「最近、NVIDIA は、Aveva、Rockwell Automation、Siemens などの大手産業オートメーション企業を含む多くの産業企業と提携に至りました。シュナイダーエレクトリック、Teradyne Robotics とその MiR および Universal Robots 企業も含まれます。最近、Nvidiahascoll
 柔軟かつ高速な 5 本の指を備え、人間のタスクを自律的に完了する初のロボットが登場、大型モデルが仮想空間トレーニングをサポート
Mar 11, 2024 pm 12:10 PM
柔軟かつ高速な 5 本の指を備え、人間のタスクを自律的に完了する初のロボットが登場、大型モデルが仮想空間トレーニングをサポート
Mar 11, 2024 pm 12:10 PM
今週、OpenAI、Microsoft、Bezos、Nvidiaが投資するロボット企業FigureAIは、7億ドル近くの資金調達を受け、来年中に自立歩行できる人型ロボットを開発する計画であると発表した。そしてテスラのオプティマスプライムには繰り返し良い知らせが届いている。今年が人型ロボットが爆発的に普及する年になることを疑う人はいないだろう。カナダに拠点を置くロボット企業 SanctuaryAI は、最近新しい人型ロボット Phoenix をリリースしました。当局者らは、多くのタスクを人間と同じ速度で自律的に完了できると主張している。人間のスピードでタスクを自律的に完了できる世界初のロボットである Pheonix は、各オブジェクトを優しくつかみ、動かし、左右にエレガントに配置することができます。自律的に物体を識別できる
 Cloud Whale Xiaoyao 001 の掃除と掃き掃除ロボットには「頭脳」があります。 | 経験
Apr 26, 2024 pm 04:22 PM
Cloud Whale Xiaoyao 001 の掃除と掃き掃除ロボットには「頭脳」があります。 | 経験
Apr 26, 2024 pm 04:22 PM
掃除ロボットやモップ拭きロボットは、近年消費者の間で最も人気のあるスマート家電製品の 1 つです。操作の利便性、あるいは操作の必要がないことで、怠け者は手を解放し、消費者は日常の家事から「解放」され、好きなことにもっと時間を費やすことができるようになり、生活の質が向上します。この流行に乗って、市場に出回っているほぼすべての家電ブランドが独自の掃除ロボットや拭き掃除ロボットを製造しており、掃除ロボット市場全体が非常に活発になっています。しかし、市場の急速な拡大は必然的に隠れた危険をもたらします。多くのメーカーがより多くの市場シェアを急速に占有するために機械の海戦術を使用し、その結果、アップグレードポイントのない多くの新製品が生まれるとも言われています。まさに「マトリョーシカ」モデルです。ただし、すべての掃除ロボットやモップロボットがそうであるわけではありません。
 この人型ロボットは魔法を使うことができます。春祭り祝賀プログラム チームに詳細を調べてもらいましょう
Feb 04, 2024 am 09:03 AM
この人型ロボットは魔法を使うことができます。春祭り祝賀プログラム チームに詳細を調べてもらいましょう
Feb 04, 2024 am 09:03 AM
瞬く間に、ロボットは魔法を使えるようになったのでしょうか?最初にテーブルの上の水スプーンを取り上げ、中には何も入っていないことを観客に証明したのが見られました。次に、卵のような物体を手に置き、水スプーンをテーブルに戻し、が「呪文を唱え」始めました… …再び水スプーンを拾ったそのとき、奇跡が起こりました。元々入っていた卵が消えて、飛び出してきたのがバスケットボールに… もう一度連続動作を見てみましょう: △ このアニメーションは一連の動作を2倍速で表示しており、スムーズに流れています。ビデオを 0.5 倍速で繰り返し再生すると、うまくいくでしょうか? 最後に、手の速度がもっと速ければ、敵から隠すことができるかもしれないという手がかりを発見しました。一部のネチズンは、ロボットの魔法のスキルが自分たちのものよりもさらに高いと嘆いていました。マグは私たちのためにこの魔法を実行してくれたのです。
 未来を形作る 10 台の人型ロボット
Mar 22, 2024 pm 08:51 PM
未来を形作る 10 台の人型ロボット
Mar 22, 2024 pm 08:51 PM
以下の 10 種類の人型ロボットが私たちの未来を形作ります。 1. ASIMO: ホンダが開発した ASIMO は、最もよく知られている人型ロボットの 1 つです。身長 4 フィート、体重 119 ポンドの ASIMO には、高度なセンサーと人工知能機能が装備されており、複雑な環境をナビゲートし、人間と対話することができます。 ASIMO は多用途性を備えているため、障害を持つ人々の支援からイベントでのプレゼンテーションまで、さまざまなタスクに適しています。 2. Pepper: ソフトバンクロボティクスによって作成された Pepper は、人間の社会的パートナーになることを目指しています。表情豊かな顔と感情を認識する能力を備えた Pepper は、会話に参加したり、小売現場で手助けしたり、教育サポートを提供したりすることもできます。コショウ
 ロボットIoTは製造業の未来となるのか?
Mar 01, 2024 pm 06:10 PM
ロボットIoTは製造業の未来となるのか?
Mar 01, 2024 pm 06:10 PM
ロボット IoT は、産業用ロボットと IoT センサーという 2 つの貴重なテクノロジーを統合することを約束する新たな開発です。ロボット モノのインターネットは製造業の主流になるでしょうか? ロボット モノのインターネットとは何ですか? ロボット モノのインターネット (IoRT) は、ロボットをインターネットに接続するネットワークの形式です。これらのロボットは、IoT センサーを使用してデータを収集し、周囲の状況を解釈します。これらは、データ処理を高速化し、リソース使用率を最適化するために、人工知能やクラウド コンピューティングなどのさまざまなテクノロジと組み合わせられることがよくあります。 IoT の開発により、ロボットは環境の変化をよりインテリジェントに感知して対応できるようになり、さまざまな業界により効率的なソリューションがもたらされます。 IoT技術と統合することで、IoTは自律的な動作と自己学習を実現するだけでなく、
