

自動運転車の障害物回避・経路計画・制御技術について詳しく解説

1 はじめに
インテリジェント交通システムは、複雑な環境における困難な自律性と安全性の問題に対処するため、研究者から特別な注目を集めています。自動運転車のコンセプトの主なモジュールは、認識、計画、制御です。
実際、知覚は環境モデリングとローカリゼーションで構成されます。それぞれ外部センサーと身体センサーに依存します。次に計画では、センシング結果から得られる情報をもとに、目的地に到達するための最適な軌道を生成します。最後に、制御モジュールは、車両のアクチュエーターに命令することによって生成された軌道を追跡することに専念します。
#この記事では、障害物を回避する特定の状況に応じたプロセスの各モジュールを紹介します。これらのタスクをグローバル アーキテクチャに統合することが、この文書の主な貢献です。認識モジュールは、環境が正確なグリッド表現に基づいて記述されることを保証します。占有グリッド マップ (OGM) の使用は、走行可能なスペースを識別し、シーン内の静的および動的オブジェクトの位置を特定できるため、障害物の回避に特に便利です。次に、回避すべきオブジェクトの姿勢が経路計画レベルで使用され、[1] に示されているシグモイドのパラメータ化関数とローリング ホライズンに基づいて軌道と速度プロファイルが生成されます。取得された曲率プロファイルは、制御モジュールをガイドするための基準経路として考慮されます。このレベルでは、従来の重心の代わりに衝突中心 (CoP) を使用する横方向誘導コントローラーに基づいて、車両に適切なステアリング角度が提供されます。提案されたコントローラーは、横方向誤差に対する外乱の影響を軽減し、横方向の安定性を確保するために、フィードフォワードおよびロバストな状態フィードバック動作に基づいています [2]。
この文書は次のように構成されています。パート II では、障害物回避のために実装されるさまざまなモジュールを含むグローバルなアプローチを示します。 3 番目の部分では、信頼グリッド占有に基づく動的物体検出方法を紹介します。セクション 4 では、パラメータ化されたシグモイド関数とローリング ホライズンに基づく障害物回避アルゴリズムについて説明します。セクション 5 では、ロバストな状態フィードバックへのフィードフォワード結合に基づいたコントローラーの設計について詳しく説明します。セクション 6 では、実験プラットフォームとこの実験方法の結果について説明します。最後に、セクション 7 でこの論文を締めくくります。
2 障害物回避戦略
#このセクションでは、図 1 に示す 3 つのモジュールに基づくグローバルな障害物回避戦略のタイトルを紹介します。 。このセクションでは各レベルを簡単に紹介します。
#写真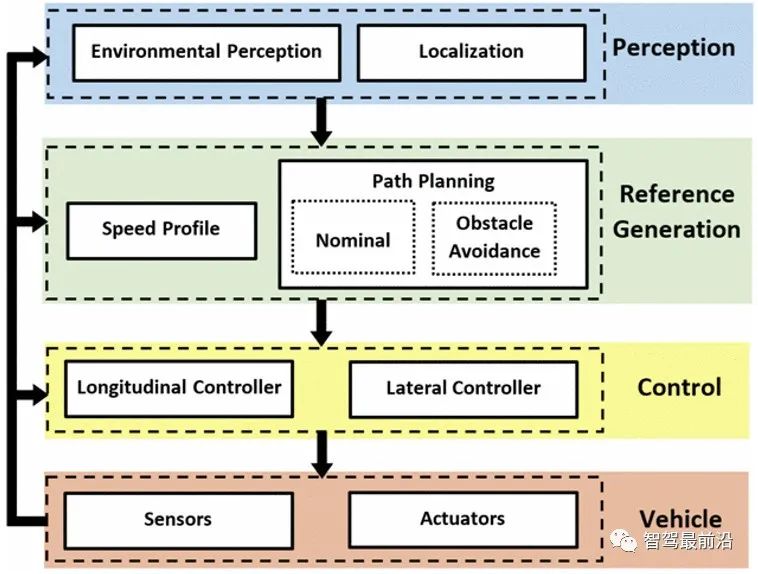
A.知覚モジュール##環境を正確かつ効果的に認識することは、自動運転車にとって必須です。この研究は主に、外部感知センサーに基づいて静的/動的物体の位置と走行可能な経路を抽出する環境認識に焦点を当てています。測位部分で考慮されない車両の位置は、既知で信頼できるものとみなされます。道路や周囲の物体に関する情報を抽出する最も一般的な方法の 1 つは、「占有グリッド」(OG) です。これは、衝突回避、センサー フュージョン、ターゲット追跡、同時位置特定とマッピング (SLAM) などのさまざまなアプリケーションで使用できます [3]。 OG の基本的な考え方は、環境グラフをバイナリ確率変数の等間隔フィールドとして表現し、各変数が環境内のその位置に障害物があるかどうかを表すことです [4]。既知の車両姿勢を考慮して、ノイズが多く不確実なセンサー測定値を処理するために、さまざまな形式から生成できます。この論文では、OG は、不確実性、不正確さ、未知の部分をモデル化し、データ融合における競合の管理も可能にするため、Dempster と Shafer によって提案された信念理論 [5][6] によって定義されます。パート 3 ではさらに詳しく説明します。
B. 基準軌道生成モジュール
このモジュールは、軌道とそれに対応する速度曲線の定義に特化しています。車両はそれに従う必要があります。プランナーは、認識モジュールから走行可能エリアと障害物の位置を受け取ります。この情報に基づいて、幾何学的軌道と速度曲線を生成できます。この記事では、パス計画戦略に焦点を当てます。このセクションは、認識された運転可能領域に基づいて、開始点から終了点までの公称軌道を提供することを目的としています。
障害物が検出されると、自動運転車の乗員の安全と快適性を確保するために 2 番目の軌道 (障害物回避軌道) が計算され、回避後に通常の軌道が追加されます。この回避軌道は、公称軌道のごく一部のみを含むため、局所計画によって取得できます。軌道生成アルゴリズムの計算コストを削減するために、[1] で説明されているローリング ホライズン法が採用されています。この手法はこの論文で拡張されています (セクション IV を参照)。これらの軌道 (公称および障害物回避) は、制御モジュール (主に横方向コントローラー) の基準として考慮できます。
C. 制御モジュール
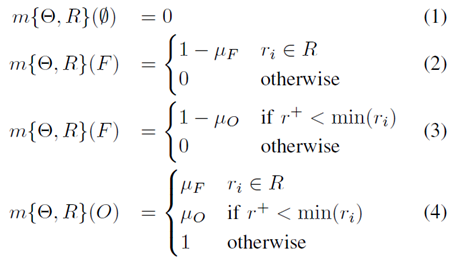
制御モジュールは、自動運転制御を確実にする縦方向コントローラーと横方向コントローラーの 2 つの主要部分で構成されます。ここでの主な焦点は、障害物回避を処理する横方向のコントローラーにあります。実際、基準生成モジュールによって与えられた望ましい経路をたどるために、横方向コントローラーによって適切なステアリング角度が提供されます。所望の経路の追跡は、横方向誤差と方位誤差という 2 つの追跡誤差を減らすことによって実現できます。文献 [7] にある幾何学的かつ動的横方向誘導戦略のうち、ここでは衝突中心 (CoP) に基づく動的アプローチが採用されています [8]。選択は、この制御方法のパフォーマンスによって決まります。 CoP は、車両の重心 (CoG) の前に位置する幾何学的な点であり、横方向の位置誤差を予測します。そうすれば、より良い軌道追跡が期待できます。一方、セクション V に示すように、CoP の動きはリアタイヤの横力から切り離されているため [9]、横力学方程式はそれほど複雑ではありません。 OG は、多次元空間をユニットに細分化した表現であり、各ユニットには知識が格納されます。占有状況の詳細[4]。現在、OG は、計算の複雑さを処理するためのより強力なリソースが利用できるため、頻繁に使用されています。メッシュの構築は多次元 (2D、2.5D、および 3D) [10] に適用されており、各セルの状態は選択された形式に従って記述されます。最も一般的なのはベイジアン フレームワークで、Elfes [4] によって最初に採用され、その後多くの拡張が行われて有名なベイジアン占有フィルター (BOF) [11] になりました。他の研究では、後述する証拠理論としても知られるデンプスター・シェーファー理論に基づく形式主義を提案しています。 #A. 信念理論の使用 #確率理論の要約、信念理論はデータとソースを十分にカバーします欠陥を表現するため、ITS での認識に適しています。アプリケーションに応じてこれらのプロパティを処理できる幅広い融合演算子が提供されます。信念フレームワークを使用して OG を構築することに関するいくつかの研究は、[12]、[13] にあります。この研究は [13] の研究に由来しており、結果として生じる衝突に基づいて移動物体の検出と走行可能空間を決定する方法を提案しました。この目的のために、識別フレームは、空き (F) または占有 (O) とみなされるセルのステータスを含むように定義されます。認識ボックスは Ω={F, O} です。基準電力セットのフレームワークには、2Ω= {∅,F,O,{F,O}} という仮定のすべての可能な組み合わせが含まれています。各状態の信念を表現するために、質量関数 m(.) は衝突 m(∅)、自由状態 m(F)、占有状態 m(O)、未知の状態 m({F,O) を表します。 }) それぞれ。 #B. センサー モデル
Picture
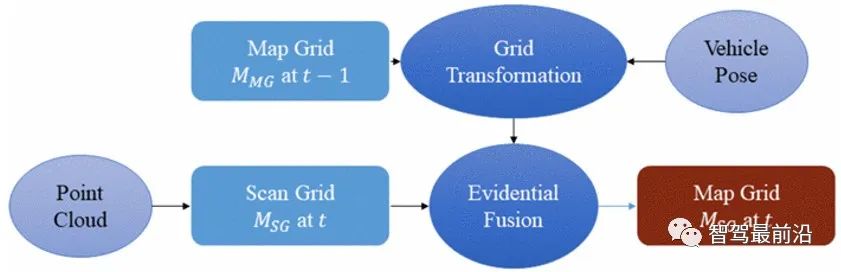
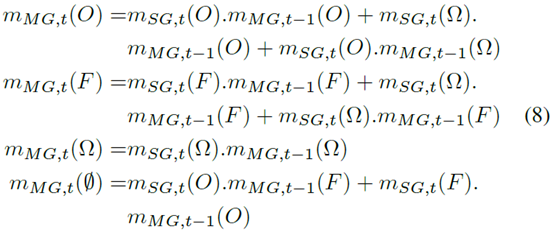
写真 図 2は、時刻 t で提供されたセンサー点群を使用して MG を構築および更新するプロセスを示しています。この更新は、マルチグリッド証拠の融合に基づいて行われます。これは、マップ グリッドを更新し、ユニットのステータスを評価する時間を確保できるため、プロセスの最も興味深い部分です。信念理論のさまざまな演算子の中で、Dempster-Shafer 組み合わせ規則が使用されます。
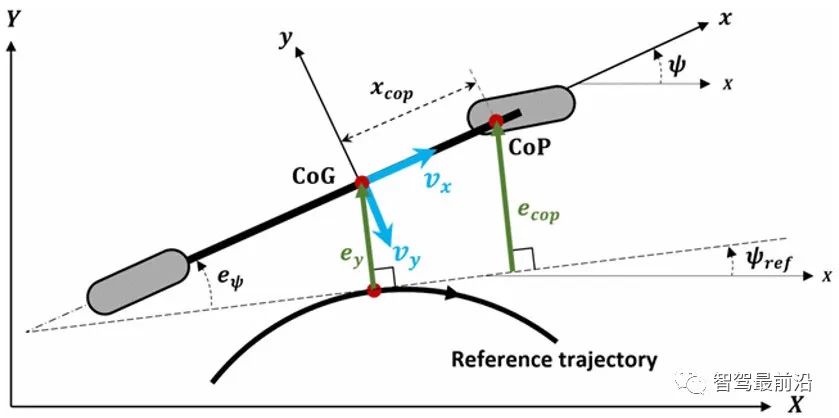
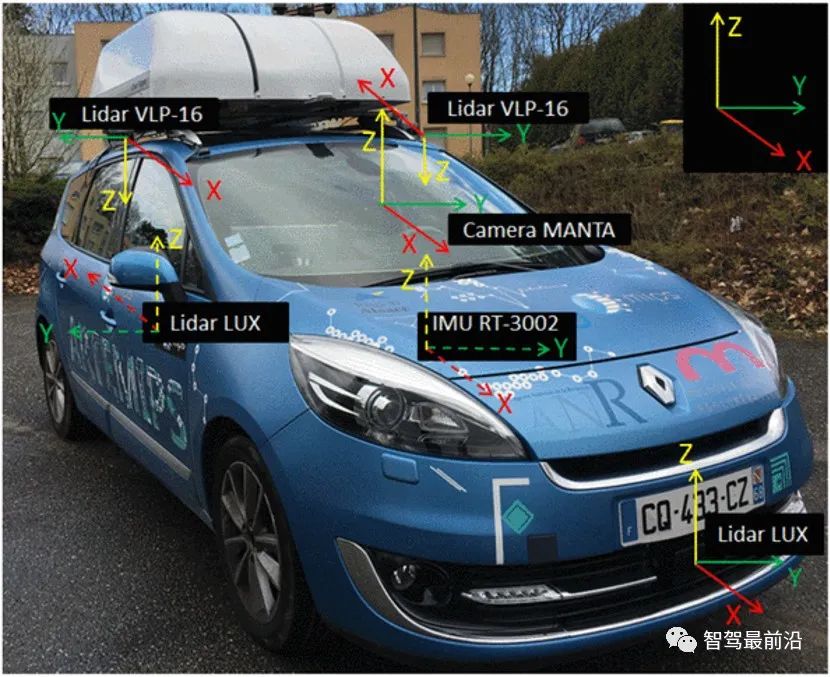
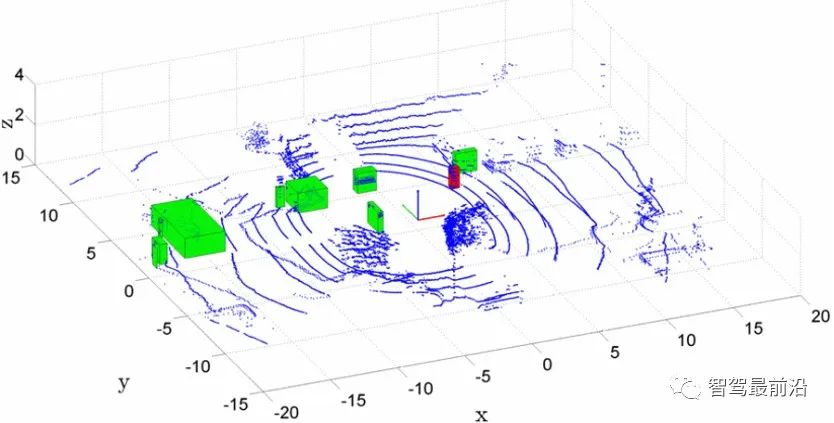
基本的に、このプロパティは t-1 と t の間の不協和音を示します。ユニットが空き状態から占有状態に、またはその逆に変化すると、不一致が発生します。したがって、競合の検出は動的セルの評価につながる可能性があります。競合では、次の 2 つの競合タイプに基づいてステータスを変更する占有セルにマークを付けることができます: where、 融合プロセスは、全体的な衝突によって状態の品質を正規化しますが、この情報を使用して、動的オブジェクトを定義するモバイル ユニットをマークすることを検討します。検出された各ポーズは、次のセクションで軌道を生成するための入力として使用されます。 このセクションは、経路計画、つまり幾何学的な軌道 (座標点に従う) Ai(xi) の作成に特化しています。 、イ)。この論文は、提案された回避アーキテクチャの実現可能性を検証することを目的としているため、速度曲線とそれに関連する縦方向の制御は考慮されていません。セクション 2 で述べたように、経路計画モジュールには 2 つの目標があります。1 つは起点と到着点に基づいてグローバル公称軌道を生成すること、もう 1 つは障害物の検出を回避するためのローカル軌道を生成することです。ここでは、回避軌道の生成に焦点を当てます。この回避軌道は、安全基準、特に障害物までの縦方向および横方向の距離に準拠する必要があります。最近 [1] で提案されているように、これらの距離は等しく、障害物の周囲に円形の安全ゾーンを作成することができます。本稿では、水平方向と垂直方向のセキュリティ基準が異なる全体的な状況を考慮して、この方法の一般化を提案します。 軌道の幾何学的形状を取得するには、クロソイド曲線、ベジェ曲線、スプラインなどの関数に基づくいくつかの数学的手法があります [14]、[15]。これらすべての幾何学的手法の徹底的なレビューは [16] に記載されています。これらの方法には興味深い特性 (滑らかさ、一連の候補の中から最適な軌道を選択するなど) がありますが、計算コストが高くなる可能性があります。その中でも、シグモイド関数は、滑らかさと計算コストの間の公平なトレードオフを表します。検討したアプローチでは、計算コストを削減するために、この数学的手法をネイティブ Horizon スケジューラと組み合わせて使用することを推奨しています。この計画アプローチの利点については、[1] で詳しく説明されています。このローカル プランナーは、占有グリッドから検出された障害物に関する情報を考慮して、適切なスムーズな回避操作を定義し、通常の軌道に戻ります。 A. 幾何学的回避# ## 図 3 は、公称軌道、安全ゾーン、および最終的なスムーズな回避のさまざまな軌道を示しています。軌跡。安全ゾーンの定義 R は、障害物を検出した後の最初のステップです。このエリアは障害物が接近しているため、衝突を避けるために航行できません。 Lx 楕円と Ly 楕円のそれぞれ長半径と短半径は、領域を定義する安全基準です。定義したら、回避軌道を設計できます。乗客の快適性を確保するために、S 字型に基づいた機能が選択されました。図 3 では、A は開始点 (自車両の重心)、B は S 字曲線の座屈点、WP は到達すべき開始点を示します。平滑度 C() は、水平ベクトル サンプルごとにプロセス全体 (安全領域の決定とシグモイド関数ベースのウェイポイントの計算) を繰り返すことで回避軌道を定義できるように調整できます。 図 3 軌道計画 アルゴリズムの計算コストを削減するために、ローカル プランナーが使用されます。障害物回避軌道全体をたどるのではなく、いくつかの部分に分割されます。ローカル軌道はこの離散レベルでサンプルごとに計算されるため、計算コストが削減され、動的障害に対してアルゴリズムが堅牢になります。サンプル サイズと水平方向の長さの 2 つのパラメータをパラメータ化できます。最後のものは、装備されている知覚センサー (ハードウェア制約) と車両速度 (ローリング ホライズン) によって異なります。サンプル ステップは、軌道をローカル セグメントに細分したものを表します。全体の原理を図 4 にまとめます。 写真 図 4 ホライズン計画 車両が次のサンプリング ステップに到達すると、ローカル水平線が再度計算されます。見てわかるように、2 つの反復の間には、アルゴリズムが動的な障害物を処理できるようにする共通部分があります。離散時間領域の場合と同様、サンプル サイズの選択には精度と計算コストの間のトレードオフが必要です。このアルゴリズムは、水平ベクトルが完全な軌道の終端に到達するまで、つまり知覚センサーが軌道のすべての部分をカバーするまで反復されます。この幾何学的な軌道は、誘導制御ステージへの入力となります。 このセクションでは、図 1 に示す制御モジュールで使用されるラテラル コントローラーの設計について説明します。横方向誘導は、図 5 に示すように、横方向誤差 (車両の重心と基準軌道の間の距離) と機首方位誤差 (車両の縦軸と基準軌道の間の距離) の 2 種類の誤差を削減することを目的としています。 図 5 横方向および機首方位のエラー ここでは、従来の CoG の代わりに横方向誤差 ey、CoP が [9] として定義されている場合は、横方向誤差を使用することをお勧めします。 CoP と CoG の間の距離 xcop ここで、m と Iz は車両の質量とヨー慣性、lf は CoG と車両間の距離です。フロントアクスル。 (12) から、CoP 横方向誤差 ecop が図 5 の横方向誤差 ey よりも大きいことがわかります。このようにして、横方向の位置誤差が予測され、より良い軌道追跡が期待できます。 CoG (重心) に基づく従来のコントローラーとは対照的に、ここでは衝撃中心 (CoP) が車両上の幾何学的な点として使用されます。 CoP の主な利点は、リアタイヤの横力が CoP の動きに影響を与えないため、横力学方程式の複雑さが軽減されることです [9]。 平面自転車モデル [17] に基づき、追跡誤差 (11) および (12) を使用して、CoP 横方向ナビゲーション コントローラーの設計に使用される追跡誤差モデルは次のとおりです。 、δf は前輪角度、 ラテラル コントローラーは、状態ベクトル誤差が確実にゼロに近づくように適切な δf を計算します。さらに、トラッキング エラー モデルのダイナミクスは wref の影響を受けるため、コントローラーはその影響の減衰レベルも保証する必要があります。これらの目標を達成するために、ロバストな状態フィードバックへのフィードフォワード結合で構成されるラテラル コントローラーが提案されています [2]。 LFF と KFB はそれぞれフィードフォワード ゲインとロバスト フィードバック ゲインです。フィードフォワード アクションは、ベクトル wref の影響を部分的に排除することを目的としています。 CoP の利点は、得られるフィードフォワードに Cr の知識が必要ないことです。状態フィードバック アクションにより、エラー ベクトルがゼロに向かって指数関数的に収束し、ベクトル wref の影響が軽減されます。このロバストな制御問題は、[2] に示すように線形行列不等式 (LMI) を使用して表現できます。 #6 実験結果 #A. 実験設定 実験プラットフォーム ARTEMIPS は、DGPS 技術を使用した高精度 IMU (慣性測定ユニット) RT-3002、2 つの IBEO LUX 2D 4 層レーザー スキャナー、2 つの VLP -16 という複数のセンサーを備えた自動試験車両です。 Velodyne3D レーザー スキャナーおよび高距離カメラ MANTA-G125 (図 6 を参照))。 RT-3002 は、位置、速度、加速度、方向測定の基準センサーとして使用されます。 LUX スキャナは、車の前部と後部のリモート検出 (4 層の点群の形式) を提供するために使用されます。 VLP-16 は、車の両側の環境の検出を完了するために使用されます (16 層の点群を提供し、360° のサラウンド ビューを備えています)。 ARTEMIPS には、ステアリングホイールとブレーキペダルを制御するための 3 つのアクチュエーターと 2 つの統合サーボモーター MAC-141、および車のエンジンを制御するための多機能 NI-daq システムも装備されています。すべてのセンサーとアクチュエーターは、Intempora の RTMaps ソフトウェア ソリューションを実行する組み込みコンピューターにリンクされています。これは、マルチセンサーおよびマルチアクチュエーター システム専用のプラットフォームです。 図 6 実験プラットフォーム ARTEMIPS とその参照フレーム # #B. 実験結果 読みやすくするために、提案されたアーキテクチャのパフォーマンスは、障害物回避状況を考慮した 1 つの実験シナリオのみを通じて評価されます。このテストは一定速度 vx=10km/h で実行されます。 4 台のレーザー スキャナーから記録されたデータ セットに基づいて、セクション III で説明した方法に従って、点群を使用して OG を構築しました。図 7 は、周囲の風景と避けるべき物体を示しています。 OG の時間的融合は、動的な単位を記述する際の矛盾を強調します。階層クラスタリング アルゴリズム (MATLAB の Statistics and Machine Learning Toolbox から) を適用して、動的オブジェクトを構築しました。それらを図 8 に示します。 3D バウンディング ボックス経由。表示される座標は、GPS データに基づく車両姿勢に対応します。避けるべき物体は赤い物体です。この方法は位置決め誤差に対して敏感であるため、一部の誤った検出結果が見つかる可能性があることに注意してください。 #写真
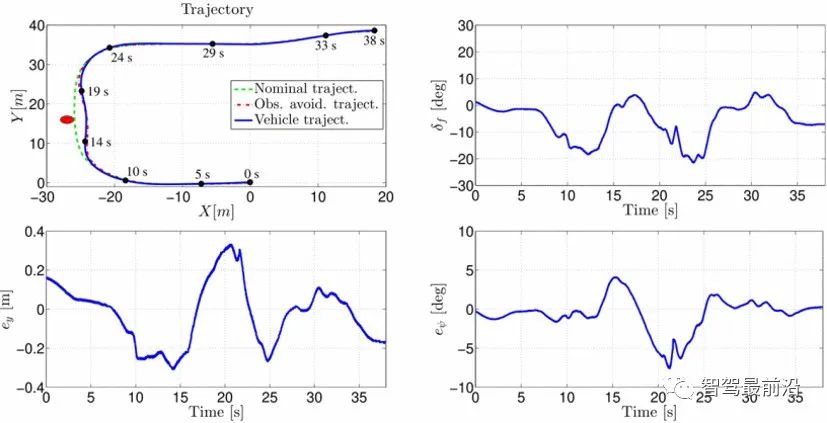
写真 実験結果を図 9 に示します。左上の画像からわかるように、公称軌道線はオブジェクトの位置と交差し、結果として生じる赤いパスは障害物を回避します。また、横方向コントローラーが良好な軌道追跡を保証し、13 秒から 20 秒の間障害物の検出を回避していることも観察できます。この時間間隔中に、コントローラーは障害物を回避し、追跡誤差の合計が小さくなるように、正の値から負の値に変化するステアリング角度を生成します。
写真
この論文では、知覚、経路計画、および制御ガイダンスの 3 つのレベルに基づく動的障害物回避スキームを提案します。動的障害物検出は、証拠占有グリッドに基づいて実行されます。経路計画はシグモイド関数に基づいて滑らかな軌道を生成し、障害物の検出を回避します。最終的に、車両は、衝突中心での横方向制御ベースの戦略を通じて、車両が生成した基準軌道に従います。当社の試験車両での実験結果から、この方法が障害物回避に有効であることがわかりました。今後の作業には、ポジショニング戦略の検討と、より複雑な状況におけるこのアプローチの評価が含まれます。 参考資料#2 動的グリッドに基づく動的障害物検出




4 軌道生成
 写真
写真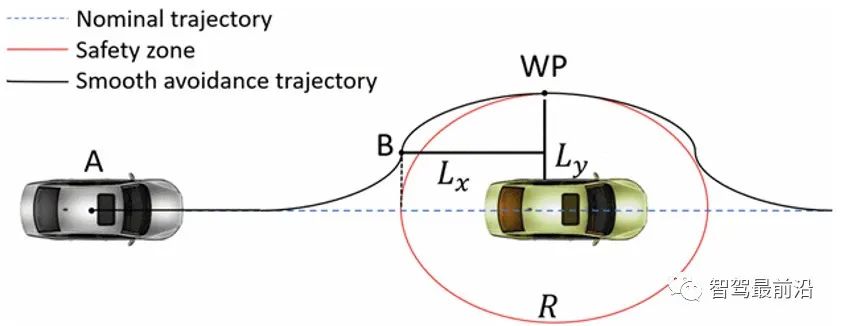 B. レベル計画
B. レベル計画5 コントローラー設計
 図
図


 には、外乱項としての期待値 ヨー角速度とヨー角加速度。
には、外乱項としての期待値 ヨー角速度とヨー角加速度。 
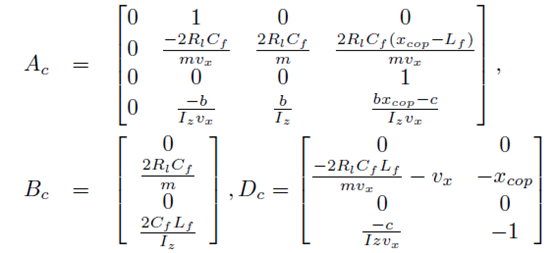

 ##Lr はCoG とリアアクスルの間の距離、Cf と Cr はフロントタイヤとリアタイヤのコーナリング剛性です。なお、Cr は Ac の 2 行目にないため、CoP を使用することで不確実なパラメータの数を減らすことができます。
##Lr はCoG とリアアクスルの間の距離、Cf と Cr はフロントタイヤとリアタイヤのコーナリング剛性です。なお、Cr は Ac の 2 行目にないため、CoP を使用することで不確実なパラメータの数を減らすことができます。 
 #
# 写真
写真
7 結論
 写真
写真 画像] [画像
画像] [画像
以上が自動運転車の障害物回避・経路計画・制御技術について詳しく解説の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7549
7549
 15
1382
52
83
11
22
90
15
1382
52
83
11
22
90

 なぜ自動運転ではガウス スプラッティングが非常に人気があるのに、NeRF は放棄され始めているのでしょうか?
Jan 17, 2024 pm 02:57 PM
なぜ自動運転ではガウス スプラッティングが非常に人気があるのに、NeRF は放棄され始めているのでしょうか?
Jan 17, 2024 pm 02:57 PM
上記と著者の個人的な理解 3 次元ガウシアンプラッティング (3DGS) は、近年、明示的な放射線フィールドとコンピューター グラフィックスの分野で出現した革新的なテクノロジーです。この革新的な方法は、数百万の 3D ガウスを使用することを特徴とし、主に暗黙的な座標ベースのモデルを使用して空間座標をピクセル値にマッピングする神経放射線場 (NeRF) 方法とは大きく異なります。明示的なシーン表現と微分可能なレンダリング アルゴリズムにより、3DGS はリアルタイム レンダリング機能を保証するだけでなく、前例のないレベルの制御とシーン編集も導入します。これにより、3DGS は、次世代の 3D 再構築と表現にとって大きな変革をもたらす可能性のあるものとして位置付けられます。この目的を達成するために、私たちは 3DGS 分野における最新の開発と懸念について初めて体系的な概要を提供します。
 自動運転シナリオにおけるロングテール問題を解決するにはどうすればよいでしょうか?
Jun 02, 2024 pm 02:44 PM
自動運転シナリオにおけるロングテール問題を解決するにはどうすればよいでしょうか?
Jun 02, 2024 pm 02:44 PM
昨日の面接で、ロングテール関連の質問をしたかと聞かれたので、簡単にまとめてみようと思いました。自動運転のロングテール問題とは、自動運転車におけるエッジケース、つまり発生確率が低い考えられるシナリオを指します。認識されているロングテール問題は、現在、単一車両のインテリジェント自動運転車の運用設計領域を制限している主な理由の 1 つです。自動運転の基礎となるアーキテクチャとほとんどの技術的問題は解決されており、残りの 5% のロングテール問題が徐々に自動運転の開発を制限する鍵となってきています。これらの問題には、さまざまな断片的なシナリオ、極端な状況、予測不可能な人間の行動が含まれます。自動運転におけるエッジ シナリオの「ロング テール」とは、自動運転車 (AV) におけるエッジ ケースを指します。エッジ ケースは、発生確率が低い可能性のあるシナリオです。これらの珍しい出来事
 カメラかライダーを選択しますか?堅牢な 3D オブジェクト検出の実現に関する最近のレビュー
Jan 26, 2024 am 11:18 AM
カメラかライダーを選択しますか?堅牢な 3D オブジェクト検出の実現に関する最近のレビュー
Jan 26, 2024 am 11:18 AM
0.前面に書かれています&& 自動運転システムは、さまざまなセンサー (カメラ、ライダー、レーダーなど) を使用して周囲の環境を認識し、アルゴリズムとモデルを使用することにより、高度な知覚、意思決定、および制御テクノロジーに依存しているという個人的な理解リアルタイムの分析と意思決定に。これにより、車両は道路標識の認識、他の車両の検出と追跡、歩行者の行動の予測などを行うことで、安全な運行と複雑な交通環境への適応が可能となり、現在広く注目を集めており、将来の交通分野における重要な開発分野と考えられています。 。 1つ。しかし、自動運転を難しくしているのは、周囲で何が起こっているかを車に理解させる方法を見つけることです。これには、自動運転システムの 3 次元物体検出アルゴリズムが、周囲環境にある物体 (位置を含む) を正確に認識し、記述することができる必要があります。
 Stable Diffusion 3 の論文がついに公開され、アーキテクチャの詳細が明らかになりましたが、Sora の再現に役立つでしょうか?
Mar 06, 2024 pm 05:34 PM
Stable Diffusion 3 の論文がついに公開され、アーキテクチャの詳細が明らかになりましたが、Sora の再現に役立つでしょうか?
Mar 06, 2024 pm 05:34 PM
StableDiffusion3 の論文がついに登場しました!このモデルは2週間前にリリースされ、Soraと同じDiT(DiffusionTransformer)アーキテクチャを採用しており、リリースされると大きな話題を呼びました。前バージョンと比較して、StableDiffusion3で生成される画像の品質が大幅に向上し、マルチテーマプロンプトに対応したほか、テキスト書き込み効果も向上し、文字化けが発生しなくなりました。 StabilityAI は、StableDiffusion3 はパラメータ サイズが 800M から 8B までの一連のモデルであると指摘しました。このパラメーター範囲は、モデルを多くのポータブル デバイス上で直接実行できることを意味し、AI の使用を大幅に削減します。
 自動運転と軌道予測についてはこの記事を読めば十分です!
Feb 28, 2024 pm 07:20 PM
自動運転と軌道予測についてはこの記事を読めば十分です!
Feb 28, 2024 pm 07:20 PM
自動運転では軌道予測が重要な役割を果たしており、自動運転軌道予測とは、車両の走行過程におけるさまざまなデータを分析し、将来の車両の走行軌跡を予測することを指します。自動運転のコアモジュールとして、軌道予測の品質は下流の計画制御にとって非常に重要です。軌道予測タスクには豊富な技術スタックがあり、自動運転の動的/静的知覚、高精度地図、車線境界線、ニューラル ネットワーク アーキテクチャ (CNN&GNN&Transformer) スキルなどに精通している必要があります。始めるのは非常に困難です。多くのファンは、できるだけ早く軌道予測を始めて、落とし穴を避けたいと考えています。今日は、軌道予測に関するよくある問題と入門的な学習方法を取り上げます。関連知識の紹介 1. プレビュー用紙は整っていますか? A: まずアンケートを見てください。
 SIMPL: 自動運転向けのシンプルで効率的なマルチエージェント動作予測ベンチマーク
Feb 20, 2024 am 11:48 AM
SIMPL: 自動運転向けのシンプルで効率的なマルチエージェント動作予測ベンチマーク
Feb 20, 2024 am 11:48 AM
原題: SIMPL: ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving 論文リンク: https://arxiv.org/pdf/2402.02519.pdf コードリンク: https://github.com/HKUST-Aerial-Robotics/SIMPL 著者単位: 香港科学大学DJI 論文のアイデア: この論文は、自動運転車向けのシンプルで効率的な動作予測ベースライン (SIMPL) を提案しています。従来のエージェントセントとの比較
 エンドツーエンドおよび次世代の自動運転システムと、エンドツーエンドの自動運転に関する誤解について話しましょう。
Apr 15, 2024 pm 04:13 PM
エンドツーエンドおよび次世代の自動運転システムと、エンドツーエンドの自動運転に関する誤解について話しましょう。
Apr 15, 2024 pm 04:13 PM
この 1 か月間、いくつかのよく知られた理由により、私は業界のさまざまな教師やクラスメートと非常に集中的な交流をしてきました。この交換で避けられない話題は当然、エンドツーエンドと人気の Tesla FSDV12 です。この機会に、現時点での私の考えや意見を整理し、皆様のご参考とご議論に役立てたいと思います。エンドツーエンドの自動運転システムをどのように定義するか、またエンドツーエンドで解決することが期待される問題は何でしょうか?最も伝統的な定義によれば、エンドツーエンド システムとは、センサーから生の情報を入力し、関心のある変数をタスクに直接出力するシステムを指します。たとえば、画像認識では、従来の特徴抽出 + 分類子方式と比較して、CNN はエンドツーエンドと言えます。自動運転タスクでは、各種センサー(カメラ/LiDAR)からのデータを入力
 nuScenes の最新 SOTA | SparseAD: スパース クエリは効率的なエンドツーエンドの自動運転に役立ちます。
Apr 17, 2024 pm 06:22 PM
nuScenes の最新 SOTA | SparseAD: スパース クエリは効率的なエンドツーエンドの自動運転に役立ちます。
Apr 17, 2024 pm 06:22 PM
先頭と開始点に書かれている エンドツーエンドのパラダイムでは、統一されたフレームワークを使用して自動運転システムのマルチタスクを実現します。このパラダイムの単純さと明確さにも関わらず、サブタスクにおけるエンドツーエンドの自動運転手法のパフォーマンスは、依然としてシングルタスク手法に比べてはるかに遅れています。同時に、以前のエンドツーエンド手法で広く使用されていた高密度鳥瞰図 (BEV) 機能により、より多くのモダリティやタスクに拡張することが困難になります。ここでは、スパース検索中心のエンドツーエンド自動運転パラダイム (SparseAD) が提案されています。このパラダイムでは、スパース検索は、高密度の BEV 表現を使用せずに、空間、時間、タスクを含む運転シナリオ全体を完全に表します。具体的には、統合されたスパース アーキテクチャが、検出、追跡、オンライン マッピングなどのタスク認識のために設計されています。さらに、重い
