

カリフォルニア州民は深く後悔:自動運転の信頼性は本当に不安であり、無人タクシーの拷問は非常に苦痛である

8月11日、米国で最も保守的な地域であるカリフォルニア州で、無人タクシーが合法的に道路を走行できるかどうかを議論する公聴会が開催された。 6時間の討論の末、自動運転支持者は3対1の投票で地滑り的な勝利を収めた
クルーズCEOのカイル・フォークト(カイル・フォークト)は、L4自動運転技術をサポートする数千台のタクシーが発売されるとサンフランシスコで発表した。今後 6 か月以内に地元住民に全天候型サービスを提供します

ただし、1 週間カリフォルニア州陸運局は無人タクシーの禁止を解除した後、その決定を遺憾に思い、ただちに厳格な規制措置を発動した。驚くべきことに、カリフォルニア州陸運局をこれほど怒らせるほど、自動運転タクシーはわずか 1 週間で何をしたのでしょうか?
1週間以内に、自動運転がカリフォルニア住民を狂わせている
カリフォルニア州政府に道路での無人タクシーの走行を許可するよう説得するために、クルーズ 無人運転の安全性を証明するために大量のデータが提供されましたが、その結果は...
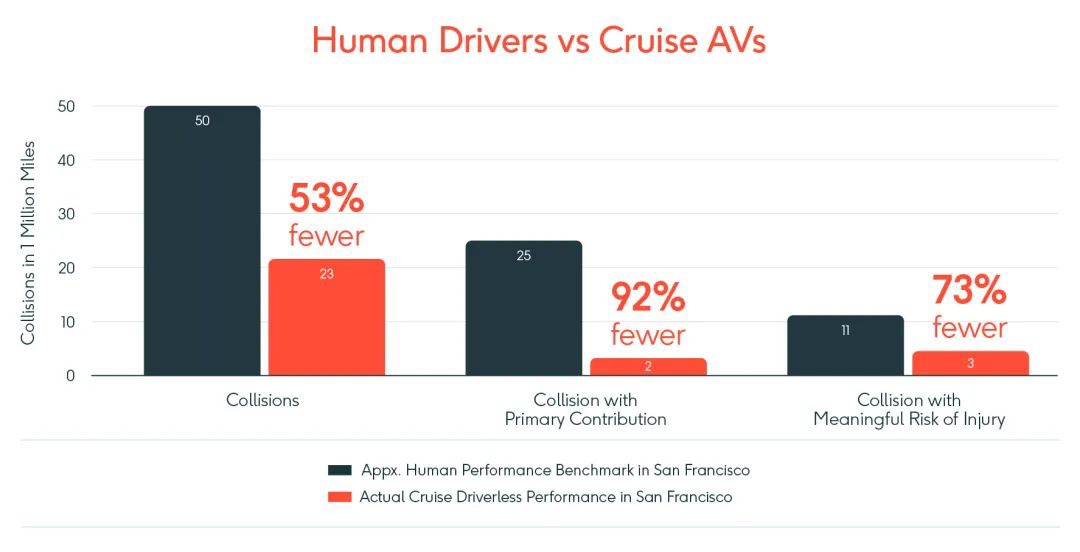
1 週間の走行後の結果でした。カリフォルニア州、クルーズ無人レンタル車の事故が多発していますが、代表的な事例をいくつかご紹介します
まず、先週木曜日午後10時、交差点で無人タクシーと消防車が衝突しました。 。 「幸いなことに、事故は深刻なものではなかった。乗客はエアバッグの保護により重傷を負わず、時間通りに病院に送られた。この点に関して、クルーズ氏は、車が消防車を感知して特定したと説明した。また、ブレーキ措置も取られた」と説明した。撮影しましたが、交差点だったので事故は避けられませんでした

同日、クルーズの無人タクシーが誤って工事中の道路に衝突し、セメントにしっかりと閉じ込められました。 AIは生身の人間ではないので、セメントが乾燥したかどうかを判断することはできませんが、タクシー会社が関与していることに変わりはありません。
もちろん、主な責任は道路管理者と管理者が負うべきです。道路建設会社は道路建設現場に隔離施設を設置していないため。タクシー会社の地図には道路建設のデータが含まれていなかったため、責任はタクシー会社にある。ご存知のとおり、中国のほぼすべてのオンライン地図プラットフォームは、リアルタイムの携帯電話データを提供できます。公式の測量および地図作成担当者に加えて、ユーザーは道路情報をアップロードすることもできます。
自動運転を開発すると決めたので、あなたはこの点を無視すべきではありません
先週の金曜日、クルーズ社に最大の問題が発生しました。交差点で突然 10 台の車が失速し、通り全体が 20 分以上通行止めになりました。クルーズ氏の説明では、地元で音楽フェスティバルが開催されていたため、無人タクシーの信号が乱れ、車両のデータが失われたというものです。
書き直しました: これは本当に信じられないことです。車はすべて接続されたままにしなければなりませんか時間は??では、トンネルを通過するときはどうすればよいでしょうか? 4G 基地局であろうと 5G 基地局であろうと、中国は 60% 以上のカバー率を持っていますが、中国は信号がどこにでもあることを保証することはできません。それに比べてアメリカの基地局カバー率は中国に比べてかなり低く、電波が不安定なだけでなく、他の信号源からの干渉も心配されています。クルーズは何を考えているのか全く分かりません。

別のタクシー会社であるウェイモも、今回はそれほど多くの事故を摘発しなかったものの、多くの問題も経験している。 2018年には自動運転車が人に衝突する初の死亡事故が発生し、消防車と数十件の衝突事故が発生した。 書き換えられた内容: Waymo タクシー会社は今回、あまり多くの事故を摘発しませんでしたが、2018 年に自動運転車が人にはねる初の死亡事故が発生したり、消防車との事故が発生したりするなど、これまでにも多くの問題が発生しています。
## この 1 週間で、自動運転技術は多くの問題を明らかにしましたが、その多くは安全性に関連しています。近年、世界各国で商用自動運転技術の推進が始まっていますが、多くの課題がある中、どうすれば安心して自動運転を利用できるのでしょうか?
自動運転は未来に向かって進んでいます。まだまだ克服すべき困難はたくさんあります。
道路上を車が数十台、数百台のスピードで走り抜けています。注意しないと、交通事故を起こし、死傷者が出る可能性があります。そのため、当然のことながら安全性についてもより注意を払います。
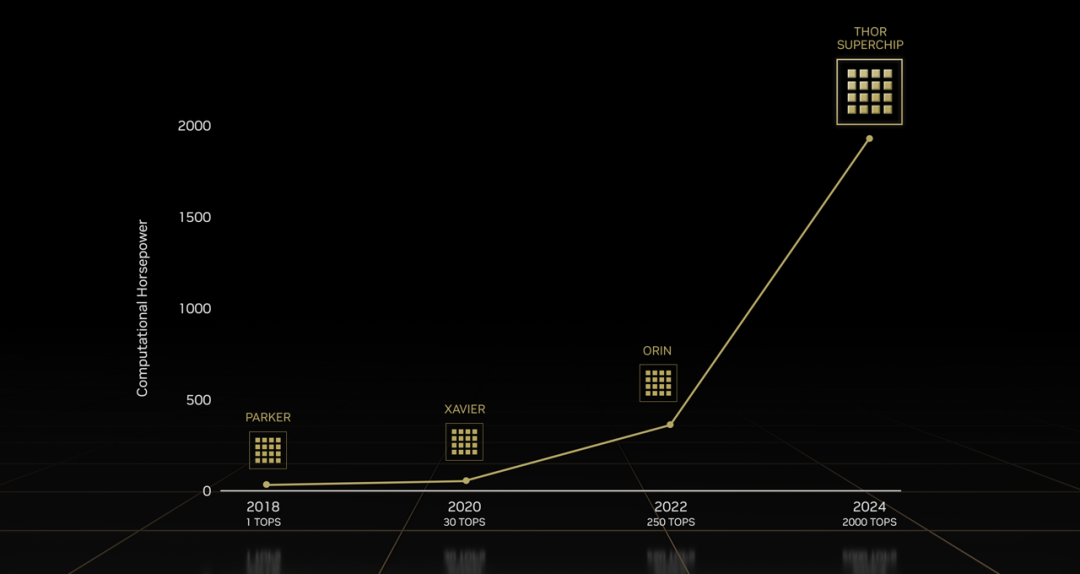
自動運転を実現するには、まずセンサーを通じてデータを収集し、次にチップとプロセッサーを組み合わせて命令を発行する必要があります。セキュリティの観点から見ると、センサーの数は多いほど優れており、収集されるデータの精度も高くなります。しかし、高精度のセンサーを多数搭載するとコストの問題はもちろん、チップへの負担も大きくなるため、インテル、エヌビディア、クアルコムが自動車業界に参入して以来、高性能チップの開発が進められている。中でも、NVIDIA が発売した Thor チップの計算能力は 1 秒あたり 2000 兆演算 (2000TOPS) に達しました
一部の自動車会社は、レーダーやその他のセンサーは冗長であると考えている。そして彼らは、ビジョン ソリューションのみに頼れば自動運転を実現できると信じています。たとえば、テスラの次期新型モデル 3 では、すべてのレーダーがキャンセルされました。しかし、人体の複雑さはあらゆる機械や人工知能の複雑さをはるかに上回り、脳の想像力はコンピューターの比ではありません。さらに、私たちが環境情報を収集する手段は目だけではなく、聴覚、触覚などの情報を収集する多くの器官があります。 (出典: Tesla)
純粋なレーダー ソリューション (純粋なビジョンまたはカメラ レーダーの融合ビジョン) を使用している自動車会社はありません。ピュア ビジョン ソリューションには、アルゴリズムに対する非常に高い要件があり、ピュア ビジョン アルゴリズムはおろか、レーダーを備えた自動運転ソリューションであっても安全性を確保することはできません。テスラの自動操縦事故はよくある
一部の国内企業は、アルゴリズムがどれほど優れていても、センサーだけに頼って L5 レベルの自動操縦を実現するのは現時点では不可能であることに気づいています。そこでこれらの企業は、高精度地図や車道連携などのソリューションを立ち上げた。中でも高精度地図では、道路情報をリアルタイムに収集する必要がなく、センチメートルレベルの精度で道路データを継続的にマッピングする必要があるため、チップへの負担が軽減されます。複雑な道路状況や交通渋滞のあるエリアにカメラを追加して車載カメラやレーダーでは検出できない情報を収集し、車に送信して安全運転を向上させます。
 ただし、どのソリューションを使用しても、明らかに問題があるのは、多大なコストがかかるということです。
ただし、どのソリューションを使用しても、明らかに問題があるのは、多大なコストがかかるということです。 自動運転は、
そうあるべきです。檻に戻して
オンラインの宣伝を見る限り、自動運転は非常に成熟しており、関係部門の一言ですぐに実用化できるようです。しかし、そうではなく、現在の商用自動運転は一部の消費者を実験台として扱っているだけであり、自動運転を商用に開放すべきかどうかについては、焦りすぎず慎重に推進すべきだと暁通氏は考えている。現在、多くの自動車メーカーが Huawei ADS や Xpeng XNGP などの高度な運転支援システムを発売しており、そのパフォーマンスは非常に優れています
##自動運転と比較すると、大げさかもしれませんが、今日の消費者はハイエンドの運転支援機能にもっと注目すべきかもしれません。自動運転には大きな将来性がありますが、現時点では実験段階に限定するのが最善です。結局のところ、すべての人の命は貴重であり、自動運転会社や自動車会社のモルモットであってはなりません。中国の多くの都市は、自動運転によるオンライン配車サービスの運用を開始している。現在は狭いエリアでしか営業できませんが、価格は非常に手頃です。機会があればぜひ体験してみてくださいこれらの自動車会社が十分なデータを収集し、消費者の安全を確保するために事故の責任を負う姿勢があれば、自動運転技術は実際に何千もの家庭に導入される可能性があります
このコンテンツは WeChat パブリック アカウントからのものです: Dianchetong (ID: diancetong233)、著者は Lost Soul ying
広告文: この記事には外部ジャンプ リンク (ハイパーリンク、QR コード、パスワードなどを含むがこれらに限定されない) が含まれています。より多くの情報を提供し、検査時間を節約するために、結果は参照のみを目的としています。このサイトのすべての記事にこの記述が含まれていることにご注意ください
以上がカリフォルニア州民は深く後悔:自動運転の信頼性は本当に不安であり、無人タクシーの拷問は非常に苦痛であるの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7675
7675
 15
1393
52
1207
24
91
11
15
1393
52
1207
24
91
11

 なぜ自動運転ではガウス スプラッティングが非常に人気があるのに、NeRF は放棄され始めているのでしょうか?
Jan 17, 2024 pm 02:57 PM
なぜ自動運転ではガウス スプラッティングが非常に人気があるのに、NeRF は放棄され始めているのでしょうか?
Jan 17, 2024 pm 02:57 PM
上記と著者の個人的な理解 3 次元ガウシアンプラッティング (3DGS) は、近年、明示的な放射線フィールドとコンピューター グラフィックスの分野で出現した革新的なテクノロジーです。この革新的な方法は、数百万の 3D ガウスを使用することを特徴とし、主に暗黙的な座標ベースのモデルを使用して空間座標をピクセル値にマッピングする神経放射線場 (NeRF) 方法とは大きく異なります。明示的なシーン表現と微分可能なレンダリング アルゴリズムにより、3DGS はリアルタイム レンダリング機能を保証するだけでなく、前例のないレベルの制御とシーン編集も導入します。これにより、3DGS は、次世代の 3D 再構築と表現にとって大きな変革をもたらす可能性のあるものとして位置付けられます。この目的を達成するために、私たちは 3DGS 分野における最新の開発と懸念について初めて体系的な概要を提供します。
 自動運転シナリオにおけるロングテール問題を解決するにはどうすればよいでしょうか?
Jun 02, 2024 pm 02:44 PM
自動運転シナリオにおけるロングテール問題を解決するにはどうすればよいでしょうか?
Jun 02, 2024 pm 02:44 PM
昨日の面接で、ロングテール関連の質問をしたかと聞かれたので、簡単にまとめてみようと思いました。自動運転のロングテール問題とは、自動運転車におけるエッジケース、つまり発生確率が低い考えられるシナリオを指します。認識されているロングテール問題は、現在、単一車両のインテリジェント自動運転車の運用設計領域を制限している主な理由の 1 つです。自動運転の基礎となるアーキテクチャとほとんどの技術的問題は解決されており、残りの 5% のロングテール問題が徐々に自動運転の開発を制限する鍵となってきています。これらの問題には、さまざまな断片的なシナリオ、極端な状況、予測不可能な人間の行動が含まれます。自動運転におけるエッジ シナリオの「ロング テール」とは、自動運転車 (AV) におけるエッジ ケースを指します。エッジ ケースは、発生確率が低い可能性のあるシナリオです。これらの珍しい出来事
 カメラかライダーを選択しますか?堅牢な 3D オブジェクト検出の実現に関する最近のレビュー
Jan 26, 2024 am 11:18 AM
カメラかライダーを選択しますか?堅牢な 3D オブジェクト検出の実現に関する最近のレビュー
Jan 26, 2024 am 11:18 AM
0.前面に書かれています&& 自動運転システムは、さまざまなセンサー (カメラ、ライダー、レーダーなど) を使用して周囲の環境を認識し、アルゴリズムとモデルを使用することにより、高度な知覚、意思決定、および制御テクノロジーに依存しているという個人的な理解リアルタイムの分析と意思決定に。これにより、車両は道路標識の認識、他の車両の検出と追跡、歩行者の行動の予測などを行うことで、安全な運行と複雑な交通環境への適応が可能となり、現在広く注目を集めており、将来の交通分野における重要な開発分野と考えられています。 。 1つ。しかし、自動運転を難しくしているのは、周囲で何が起こっているかを車に理解させる方法を見つけることです。これには、自動運転システムの 3 次元物体検出アルゴリズムが、周囲環境にある物体 (位置を含む) を正確に認識し、記述することができる必要があります。
 座標系の変換を本当にマスターしましたか?自動運転と切り離せないマルチセンサーの問題
Oct 12, 2023 am 11:21 AM
座標系の変換を本当にマスターしましたか?自動運転と切り離せないマルチセンサーの問題
Oct 12, 2023 am 11:21 AM
最初のパイロットおよび重要な記事では、主に自動運転技術で一般的に使用されるいくつかの座標系と、それらの間の相関と変換を完了し、最終的に統合環境モデルを構築する方法を紹介します。ここでの焦点は、車両からカメラの剛体への変換 (外部パラメータ)、カメラから画像への変換 (内部パラメータ)、および画像からピクセル単位への変換を理解することです。 3D から 2D への変換には、対応する歪み、変換などが発生します。要点:車両座標系とカメラ本体座標系を平面座標系とピクセル座標系に書き換える必要がある 難易度:画像の歪みを考慮する必要がある 歪み補正と歪み付加の両方を画面上で補正する2. はじめに ビジョンシステムには、ピクセル平面座標系 (u, v)、画像座標系 (x, y)、カメラ座標系 ()、世界座標系 () の合計 4 つの座標系があります。それぞれの座標系には関係性があり、
 自動運転と軌道予測についてはこの記事を読めば十分です!
Feb 28, 2024 pm 07:20 PM
自動運転と軌道予測についてはこの記事を読めば十分です!
Feb 28, 2024 pm 07:20 PM
自動運転では軌道予測が重要な役割を果たしており、自動運転軌道予測とは、車両の走行過程におけるさまざまなデータを分析し、将来の車両の走行軌跡を予測することを指します。自動運転のコアモジュールとして、軌道予測の品質は下流の計画制御にとって非常に重要です。軌道予測タスクには豊富な技術スタックがあり、自動運転の動的/静的知覚、高精度地図、車線境界線、ニューラル ネットワーク アーキテクチャ (CNN&GNN&Transformer) スキルなどに精通している必要があります。始めるのは非常に困難です。多くのファンは、できるだけ早く軌道予測を始めて、落とし穴を避けたいと考えています。今日は、軌道予測に関するよくある問題と入門的な学習方法を取り上げます。関連知識の紹介 1. プレビュー用紙は整っていますか? A: まずアンケートを見てください。
 エンドツーエンドおよび次世代の自動運転システムと、エンドツーエンドの自動運転に関する誤解について話しましょう。
Apr 15, 2024 pm 04:13 PM
エンドツーエンドおよび次世代の自動運転システムと、エンドツーエンドの自動運転に関する誤解について話しましょう。
Apr 15, 2024 pm 04:13 PM
この 1 か月間、いくつかのよく知られた理由により、私は業界のさまざまな教師やクラスメートと非常に集中的な交流をしてきました。この交換で避けられない話題は当然、エンドツーエンドと人気の Tesla FSDV12 です。この機会に、現時点での私の考えや意見を整理し、皆様のご参考とご議論に役立てたいと思います。エンドツーエンドの自動運転システムをどのように定義するか、またエンドツーエンドで解決することが期待される問題は何でしょうか?最も伝統的な定義によれば、エンドツーエンド システムとは、センサーから生の情報を入力し、関心のある変数をタスクに直接出力するシステムを指します。たとえば、画像認識では、従来の特徴抽出 + 分類子方式と比較して、CNN はエンドツーエンドと言えます。自動運転タスクでは、各種センサー(カメラ/LiDAR)からのデータを入力
 SIMPL: 自動運転向けのシンプルで効率的なマルチエージェント動作予測ベンチマーク
Feb 20, 2024 am 11:48 AM
SIMPL: 自動運転向けのシンプルで効率的なマルチエージェント動作予測ベンチマーク
Feb 20, 2024 am 11:48 AM
原題: SIMPL: ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving 論文リンク: https://arxiv.org/pdf/2402.02519.pdf コードリンク: https://github.com/HKUST-Aerial-Robotics/SIMPL 著者単位: 香港科学大学DJI 論文のアイデア: この論文は、自動運転車向けのシンプルで効率的な動作予測ベースライン (SIMPL) を提案しています。従来のエージェントセントとの比較
 FisheyeDetNet: 魚眼カメラに基づいた最初のターゲット検出アルゴリズム
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: 魚眼カメラに基づいた最初のターゲット検出アルゴリズム
Apr 26, 2024 am 11:37 AM
目標検出は自動運転システムにおいて比較的成熟した問題であり、その中でも歩行者検出は最も初期に導入されたアルゴリズムの 1 つです。ほとんどの論文では非常に包括的な研究が行われています。ただし、サラウンドビューに魚眼カメラを使用した距離認識については、あまり研究されていません。放射状の歪みが大きいため、標準のバウンディング ボックス表現を魚眼カメラに実装するのは困難です。上記の説明を軽減するために、拡張バウンディング ボックス、楕円、および一般的な多角形の設計を極/角度表現に探索し、これらの表現を分析するためのインスタンス セグメンテーション mIOU メトリックを定義します。提案された多角形モデルの FisheyeDetNet は、他のモデルよりも優れたパフォーマンスを示し、同時に自動運転用の Valeo 魚眼カメラ データセットで 49.5% の mAP を達成しました。
