

タイトル変更: Byte、ロボット操作の成功率と効果を向上させるための Vi-PRoM ビジュアル事前トレーニング プログラムを開始

近年、大規模な実世界データに対する視覚的な事前トレーニングが大幅に進歩し、ピクセル観察に基づくロボット学習に大きな可能性が示されています。ただし、これらの研究は、トレーニング前のデータ、方法、モデルの点で異なります。したがって、どのタイプのデータ、事前トレーニング方法、モデルがロボット制御をより効果的に支援できるかはまだ未解決の問題です。
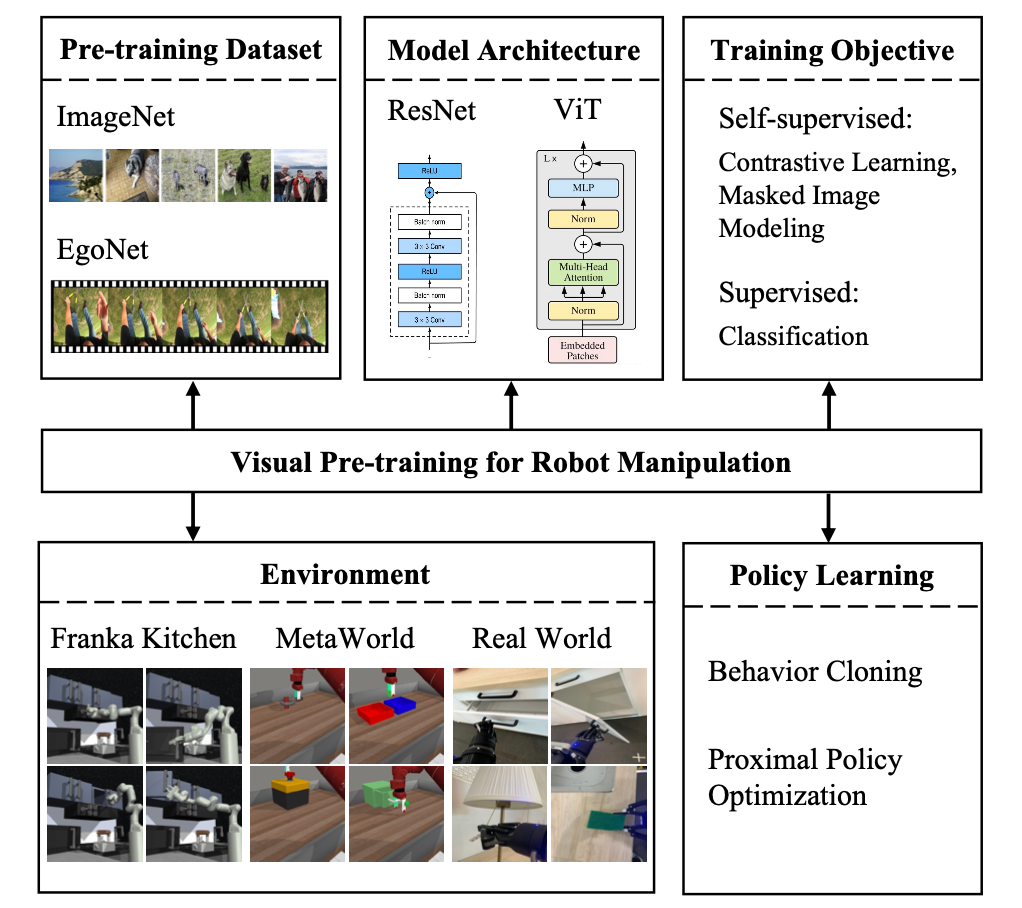
これに基づいて、ByteDance 研究チームの研究者は次のことから始めました事前トレーニング データセット、モデル アーキテクチャ、トレーニング方法の 3 つの基本的な視点 視覚的な事前トレーニング戦略がロボット操作タスクに与える影響を包括的に研究し、ロボット学習に有益ないくつかの重要な実験結果を提供しました。さらに、自己教師あり学習と教師あり学習を組み合わせた、 Vi-PRoMと呼ばれるロボット操作のための視覚事前学習スキームを提案しました。 前者は対照学習を使用して大規模なラベルなしデータから潜在的なパターンを取得し、後者は視覚的な意味論と時間的な動的変化を学習することを目的としています。さまざまなシミュレーション環境や実際のロボットで行われた多数のロボット動作実験により、このソリューションの優位性が証明されています。
- 論文アドレス: https://arxiv.org/pdf/2308.03620.pdf
- #プロジェクト アドレス: https://explore-pretrain-robot.github.io/
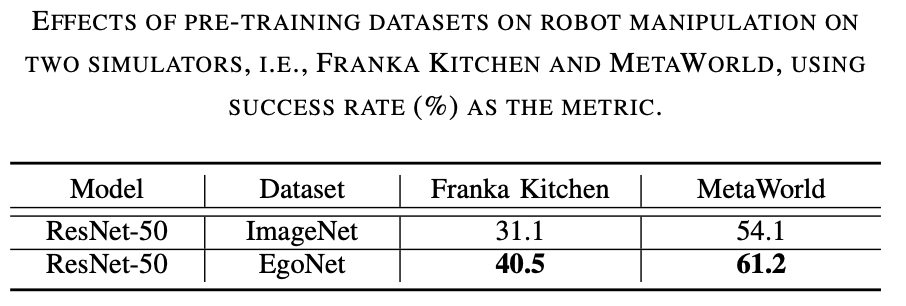
EgoNet は ImageNet よりも強力です。対照的な学習方法を通じてさまざまなデータセット (つまり、ImageNet と EgoNet) でビジュアル エンコーダーを事前トレーニングし、ロボット操作タスクでのパフォーマンスを観察します。以下の表 1 からわかるように、EgoNet で事前トレーニングされたモデルは、ロボット操作タスクで優れたパフォーマンスを達成しました。明らかに、ロボットは操作タスクに関してビデオに含まれるインタラクティブな知識と時間的関係を好みます。さらに、EgoNet の自己中心的な自然画像には世界に関するよりグローバルなコンテキストがあり、より豊富な視覚的特徴を学習できることを意味します
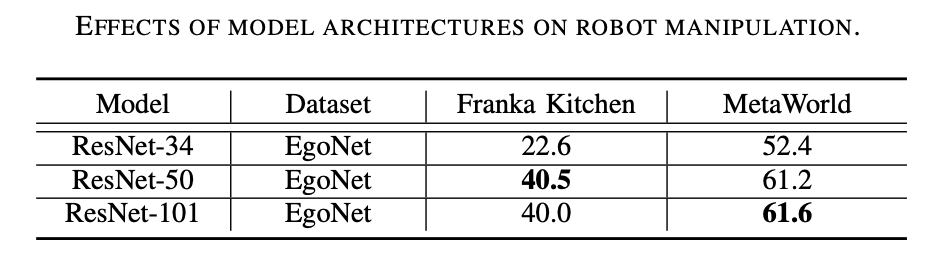
ResNet-50 のパフォーマンスが向上します。以下の表 2 からわかるように、ResNet-50 と ResNet-101 はロボット操作タスクにおいて ResNet-34 よりも優れたパフォーマンスを発揮します。さらに、モデルが ResNet-50 から ResNet-101 に増加してもパフォーマンスは向上しません。
 #事前トレーニング方法
#事前トレーニング方法
に従って書き直す必要があります。原文の意味 内容は「事前学習法には対照学習が好ましい。以下の表3に示すように、MoCo-v3はImageNetとEgoNetデータセットの両方でMAEを上回っており、マスクと比較して対照学習の方が効果的であることが証明されている」さらに、ロボットの動作には、マスク画像モデリングを通じて学習した構造情報よりも、対照学習を通じて得られた視覚的意味論の方が重要です。」 書き直された内容: 対照学習は、推奨される事前トレーニング方法です。表 3 からわかるように、MoCo-v3 は ImageNet と EgoNet データセットの両方で MAE よりも優れたパフォーマンスを示し、対照学習がマスク画像モデリングよりも効果的であることを示しています。さらに、マスク画像モデリングによって学習された構造情報よりも、対照学習によって得られた視覚的意味論の方がロボットの動作にとって重要です。
アルゴリズムの紹介 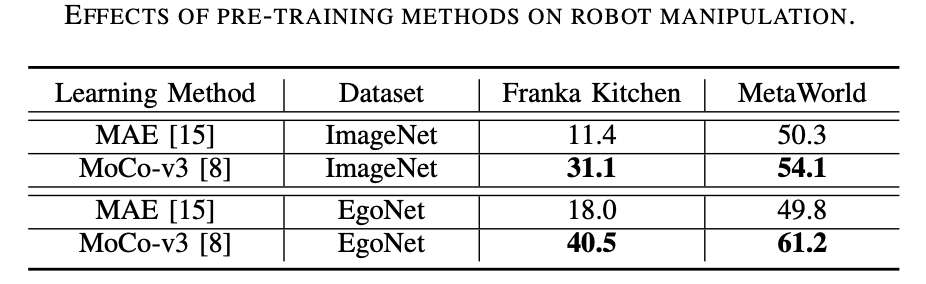
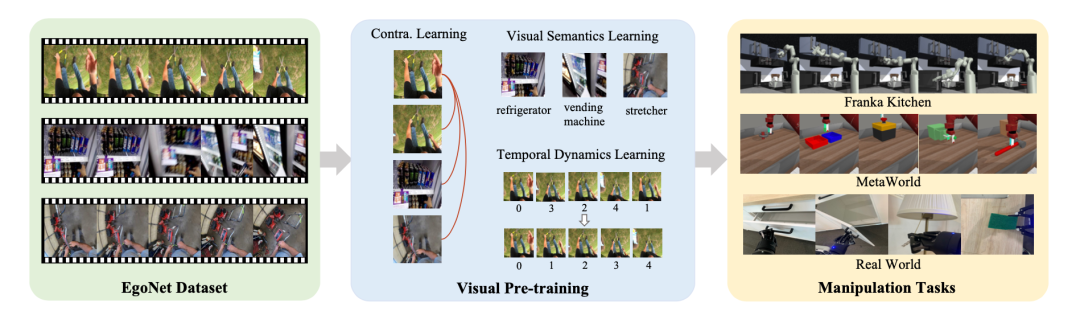
上記の調査に基づいて、本研究ではロボット操作のための視覚的事前訓練ソリューション (Vi-PRoM) を提案します。このソリューションは、EgoNet データセット上で ResNet-50 を事前トレーニングすることにより、ロボット動作の包括的な視覚表現を抽出します。具体的には、まず対照学習を使用して、自己監視を通じて EgoNet データセットから人と物体の相互作用パターンを取得します。次に、エンコーダの表現をさらに強化するために、2 つの追加の学習目標、つまり視覚的意味予測と時間的動的予測が提案されています。以下の図は、Vi-PRoM の基本的なプロセスを示しています。注目すべきことに、この研究では視覚的な意味論と時間的ダイナミクスを学ぶために手動のラベル付けを必要としません。
実験結果
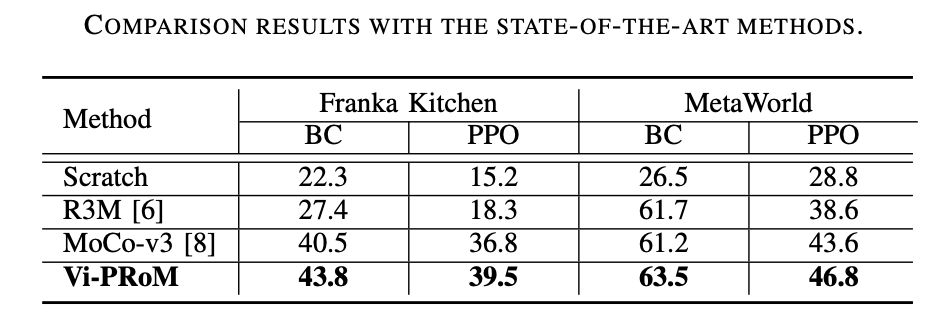
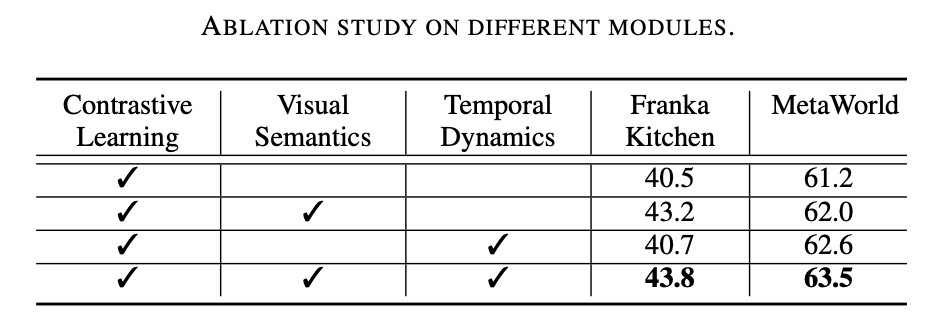
この研究作業では、2 つのシミュレーション環境 (Franka Kitchen と MetaWorld) で広範な実験が行われました。実験結果は、提案された事前トレーニングスキームがロボット操作においてこれまでの最先端の方法よりも優れていることを示しています。アブレーション実験の結果は以下の表に示されており、ロボット操作における視覚的意味学習と時間的動的学習の重要性を証明できます。さらに、両方の学習ターゲットが存在しない場合、Vi-PRoM の成功率は大幅に低下し、視覚的意味学習と時間的動的学習の連携の有効性が実証されました。
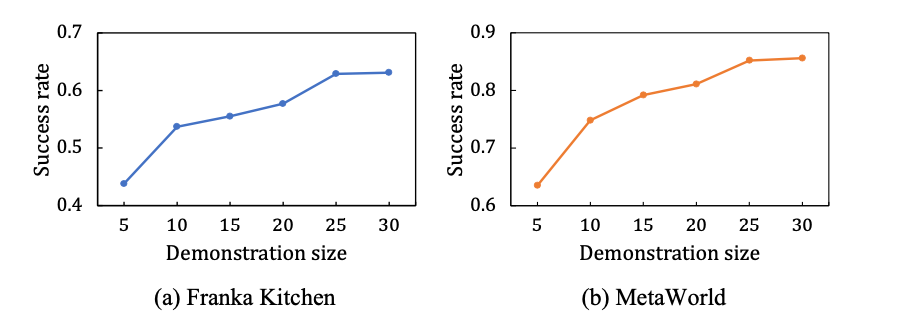
この研究では、Vi-PRoM のスケーラビリティも調査します。以下の左図に示すように、Franka Kitchen および MetaWorld のシミュレーション環境では、デモ データのサイズが大きくなるにつれて Vi-PRoM の成功率が着実に向上しています。大規模なエキスパートのデモンストレーション データセットでトレーニングした後、Vi-PRoM モデルはロボット操作タスクでのスケーラビリティを示します。
# Vi-PRoM の強力なビジュアル表現機能により、本物のロボット引き出しやキャビネットのドアを開けることができます
フランカ キッチンでの実験結果では、Vi-PRoM の成功率が高く、5 つのタスクにおいて R3M よりも効率的であることが示されています。 。
R3M:
##Vi-PRoM:
##Vi-PRoM のビジュアルにより、MetaWorld 上で表現は、アクションの予測に効果的に使用できる優れたセマンティックおよび動的特徴を学習するため、R3M と比較して、Vi-PRoM は操作を完了するために必要なステップが少なくなります。
R3M:
#Vi-PRoM:

 ##Vi-PRoM のビジュアルにより、MetaWorld 上で表現は、アクションの予測に効果的に使用できる優れたセマンティックおよび動的特徴を学習するため、R3M と比較して、Vi-PRoM は操作を完了するために必要なステップが少なくなります。
##Vi-PRoM のビジュアルにより、MetaWorld 上で表現は、アクションの予測に効果的に使用できる優れたセマンティックおよび動的特徴を学習するため、R3M と比較して、Vi-PRoM は操作を完了するために必要なステップが少なくなります。 


以上がタイトル変更: Byte、ロボット操作の成功率と効果を向上させるための Vi-PRoM ビジュアル事前トレーニング プログラムを開始の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 1654
1654
 14
1413
52
1306
25
1252
29
1225
24
14
1413
52
1306
25
1252
29
1225
24

 オープンソース!ゾーイデプスを超えて! DepthFM: 高速かつ正確な単眼深度推定!
Apr 03, 2024 pm 12:04 PM
オープンソース!ゾーイデプスを超えて! DepthFM: 高速かつ正確な単眼深度推定!
Apr 03, 2024 pm 12:04 PM
0.この記事は何をするのですか?私たちは、多用途かつ高速な最先端の生成単眼深度推定モデルである DepthFM を提案します。従来の深度推定タスクに加えて、DepthFM は深度修復などの下流タスクでも最先端の機能を実証します。 DepthFM は効率的で、いくつかの推論ステップ内で深度マップを合成できます。この作品について一緒に読みましょう〜 1. 論文情報タイトル: DepthFM: FastMonocularDepthEstimationwithFlowMatching 著者: MingGui、JohannesS.Fischer、UlrichPrestel、PingchuanMa、Dmytr
 世界で最も強力なオープンソース MoE モデルが登場。GPT-4 に匹敵する中国語機能を備え、価格は GPT-4-Turbo のわずか 1% 近くです
May 07, 2024 pm 04:13 PM
世界で最も強力なオープンソース MoE モデルが登場。GPT-4 に匹敵する中国語機能を備え、価格は GPT-4-Turbo のわずか 1% 近くです
May 07, 2024 pm 04:13 PM
従来のコンピューティングを超える能力を備えているだけでなく、より低コストでより効率的なパフォーマンスを実現する人工知能モデルを想像してみてください。これは SF ではありません。世界で最も強力なオープンソース MoE モデルである DeepSeek-V2[1] が登場しました。 DeepSeek-V2 は、経済的なトレーニングと効率的な推論の特徴を備えた強力な専門家混合 (MoE) 言語モデルです。これは 236B のパラメータで構成されており、そのうち 21B は各マーカーをアクティブにするために使用されます。 DeepSeek67B と比較して、DeepSeek-V2 はパフォーマンスが優れていると同時に、トレーニング コストを 42.5% 節約し、KV キャッシュを 93.3% 削減し、最大生成スループットを 5.76 倍に高めます。 DeepSeek は一般的な人工知能を研究する会社です
 AI が数学研究を破壊する!フィールズ賞受賞者で中国系アメリカ人の数学者が上位 11 件の論文を主導 | テレンス・タオが「いいね!」しました
Apr 09, 2024 am 11:52 AM
AI が数学研究を破壊する!フィールズ賞受賞者で中国系アメリカ人の数学者が上位 11 件の論文を主導 | テレンス・タオが「いいね!」しました
Apr 09, 2024 am 11:52 AM
AI は確かに数学を変えつつあります。最近、この問題に細心の注意を払っている陶哲軒氏が『米国数学協会会報』(米国数学協会会報)の最新号を送ってくれた。 「機械は数学を変えるのか?」というテーマを中心に、多くの数学者が意見を述べ、そのプロセス全体は火花に満ち、ハードコアで刺激的でした。著者には、フィールズ賞受賞者のアクシャイ・ベンカテシュ氏、中国の数学者鄭楽軍氏、ニューヨーク大学のコンピューター科学者アーネスト・デイビス氏、その他業界で著名な学者を含む強力な顔ぶれが揃っている。 AI の世界は劇的に変化しています。これらの記事の多くは 1 年前に投稿されたものです。
 こんにちは、電気アトラスです!ボストン・ダイナミクスのロボットが復活、180度の奇妙な動きにマスク氏も恐怖
Apr 18, 2024 pm 07:58 PM
こんにちは、電気アトラスです!ボストン・ダイナミクスのロボットが復活、180度の奇妙な動きにマスク氏も恐怖
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas は正式に電動ロボットの時代に突入します!昨日、油圧式アトラスが歴史の舞台から「涙ながらに」撤退したばかりですが、今日、ボストン・ダイナミクスは電動式アトラスが稼働することを発表しました。ボストン・ダイナミクス社は商用人型ロボットの分野でテスラ社と競争する決意を持っているようだ。新しいビデオが公開されてから、わずか 10 時間ですでに 100 万人以上が視聴しました。古い人が去り、新しい役割が現れるのは歴史的な必然です。今年が人型ロボットの爆発的な年であることは間違いありません。ネットユーザーは「ロボットの進歩により、今年の開会式は人間のように見え、人間よりもはるかに自由度が高い。しかし、これは本当にホラー映画ではないのか?」とコメントした。ビデオの冒頭では、アトラスは仰向けに見えるように地面に静かに横たわっています。次に続くのは驚くべきことです
 MLP に代わる KAN は、オープンソース プロジェクトによって畳み込みまで拡張されました
Jun 01, 2024 pm 10:03 PM
MLP に代わる KAN は、オープンソース プロジェクトによって畳み込みまで拡張されました
Jun 01, 2024 pm 10:03 PM
今月初め、MIT やその他の機関の研究者らは、MLP に代わる非常に有望な代替案である KAN を提案しました。 KAN は、精度と解釈可能性の点で MLP よりも優れています。また、非常に少数のパラメーターを使用して、多数のパラメーターを使用して実行する MLP よりも優れたパフォーマンスを発揮できます。たとえば、著者らは、KAN を使用して、より小規模なネットワークと高度な自動化で DeepMind の結果を再現したと述べています。具体的には、DeepMind の MLP には約 300,000 個のパラメーターがありますが、KAN には約 200 個のパラメーターしかありません。 KAN は、MLP が普遍近似定理に基づいているのに対し、KAN はコルモゴロフ-アーノルド表現定理に基づいているのと同様に、強力な数学的基礎を持っています。以下の図に示すように、KAN は
 テスラのロボットは工場で働く、マスク氏:手の自由度は今年22に達する!
May 06, 2024 pm 04:13 PM
テスラのロボットは工場で働く、マスク氏:手の自由度は今年22に達する!
May 06, 2024 pm 04:13 PM
テスラのロボット「オプティマス」の最新映像が公開され、すでに工場内で稼働可能となっている。通常の速度では、バッテリー(テスラの4680バッテリー)を次のように分類します:公式は、20倍の速度でどのように見えるかも公開しました - 小さな「ワークステーション」上で、ピッキング、ピッキング、ピッキング:今回は、それがリリースされたハイライトの1つビデオの内容は、オプティマスが工場内でこの作業を完全に自律的に行い、プロセス全体を通じて人間の介入なしに完了するというものです。そして、オプティマスの観点から見ると、自動エラー修正に重点を置いて、曲がったバッテリーを拾い上げたり配置したりすることもできます。オプティマスのハンドについては、NVIDIA の科学者ジム ファン氏が高く評価しました。オプティマスのハンドは、世界の 5 本指ロボットの 1 つです。最も器用。その手は触覚だけではありません
 オックスフォード大学の最新情報!ミッキー:2D画像を3D SOTAでマッチング! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
オックスフォード大学の最新情報!ミッキー:2D画像を3D SOTAでマッチング! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
前に書かれたプロジェクトのリンク: https://nianticlabs.github.io/mickey/ 2 枚の写真が与えられた場合、それらの写真間の対応関係を確立することで、それらの間のカメラのポーズを推定できます。通常、これらの対応は 2D 対 2D であり、推定されたポーズはスケール不定です。いつでもどこでもインスタント拡張現実などの一部のアプリケーションでは、スケール メトリクスの姿勢推定が必要なため、スケールを回復するために外部深度推定器に依存します。この論文では、3D カメラ空間でのメトリックの対応を予測できるキーポイント マッチング プロセスである MicKey を提案します。画像全体の 3D 座標マッチングを学習することで、相対的なメトリックを推測できるようになります。
 Kuaishou バージョンの Sora「Ke Ling」がテスト用に公開されています。120 秒以上のビデオを生成し、物理学をより深く理解し、複雑な動きを正確にモデル化できます。
Jun 11, 2024 am 09:51 AM
Kuaishou バージョンの Sora「Ke Ling」がテスト用に公開されています。120 秒以上のビデオを生成し、物理学をより深く理解し、複雑な動きを正確にモデル化できます。
Jun 11, 2024 am 09:51 AM
何?ズートピアは国産AIによって実現するのか?ビデオとともに公開されたのは、「Keling」と呼ばれる新しい大規模な国産ビデオ生成モデルです。 Sora も同様の技術的ルートを使用し、自社開発の技術革新を多数組み合わせて、大きく合理的な動きをするだけでなく、物理世界の特性をシミュレートし、強力な概念的結合能力と想像力を備えたビデオを制作します。データによると、Keling は、最大 1080p の解像度で 30fps で最大 2 分の超長時間ビデオの生成をサポートし、複数のアスペクト比をサポートします。もう 1 つの重要な点は、Keling は研究所が公開したデモやビデオ結果のデモンストレーションではなく、ショートビデオ分野のリーダーである Kuaishou が立ち上げた製品レベルのアプリケーションであるということです。さらに、主な焦点は実用的であり、白紙小切手を書かず、リリースされたらすぐにオンラインに移行することです。Ke Ling の大型モデルは Kuaiying でリリースされました。
