

ハルビン工業大学のこの車輪脚ロボットがバージョン 3.0 をリリースしました。設計、制御、性能テストをわかりやすく解説

DARPA (米国国防高等研究計画局) ロボット チャレンジ (DRC) 米国国防総省が後援し、2 年ごとに開催されるこのコンテストは、人間にはできないタスクを実行できるロボットを選出することを目的としています。福島原子力発電所で、危険が迫った際に現場で応急処置を行うロボット。
2015 年の DRC DARPA ロボット チャレンジでは、韓国のロボット DRC-HUBO がその「ユニークなスキル」に頼って、5 か国の他のトップ ロボット 22 台を破り、 優勝しました。当時ボストンダイナミクス社が開発したアトラスや日本のHRPなどの多くのスターロボット。
ロボット工学の分野では、
歩行バランスは常に克服できないギャップでした。これは HUBO の最終勝利の鍵でもあります。膝と足首に取り付けられた車輪により、ロボットは歩行モードから車輪移動に切り替えることができます。 これを開発した「KAIST」チームも、当時200万ドルの大賞を獲得しました。
危険な環境での探索と救助は、ロボットの脚動作の重要な用途です。災害救助や現場探索に使用されるロボットは、多くの場合、平坦な道路で迅速に移動し、複雑な地形に適応する能力が求められます。この問題に基づいて、ハルビン工業大学機械電気工学院ロボット工学システム国家重点研究所のチームは、機動性と適応性の高い油圧駆動の自律車輪脚ロボット システムである WLR-3P ロボットを開発しました。このロボットは、平坦な道路では迅速かつ効率的に移動でき、険しい地形環境でも優れた適応性を備えています。この研究は、中国科学技術ジャーナルの新刊「Cyborg and Bionic Systems」に論文 (WLR-3P の設計と制御: 油圧車輪脚ロボットの設計と制御) というタイトルで掲載されました。 Excellence Action Plan High startingポイント。
 紙の住所スタンプ→https://spj.science.org/doi/10.34133/cbsystems.0025
紙の住所スタンプ→https://spj.science.org/doi/10.34133/cbsystems.0025
まず、WLR-3P がどのようなものかを見てみましょう:
 WLR-3P
WLR-3P
新型ホースレス油圧車輪脚ロボットとして、自律力でジャンプして素早く移動することができます。 それでは、研究者はどのようにしてロボットの 操縦性と環境適応性を向上させているのでしょうか?
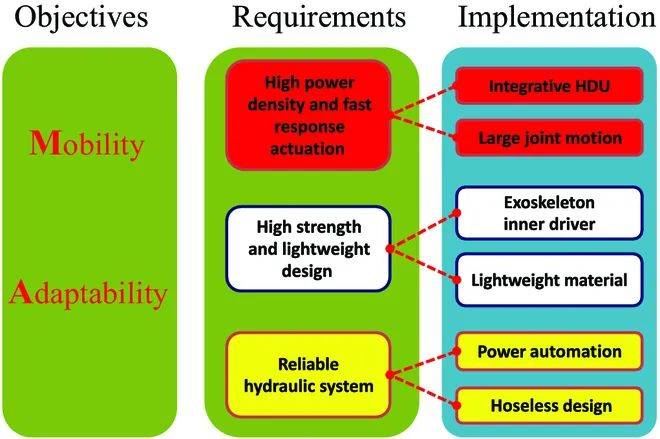
(a) 高出力密度と高速応答駆動、(b) 軽量、大慣性、高強度、(c) 信頼性の高い油圧システム。WLR-3Pの機構設計手法を書き換えることが可能
WLR-3Pの部品構成と寸法
上に示すように、WLR-3P には 7 自由度 (DOF) があります。各脚に 3 DOF、腰に 1 DOF です。脚の 3 自由度はそれぞれ股関節、膝関節、駆動輪にあり、股関節と膝関節は HDU、駆動輪は DC モーターで駆動されます。 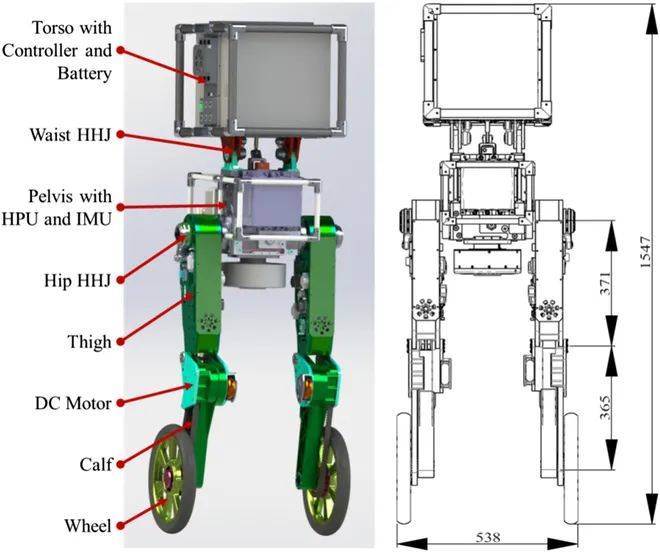
なぜ油圧式を選ぶのですか?簡単かつ乱暴に言うと、統合油圧駆動装置を使用した
ロボットは、出力密度が高く、駆動応答が速いということです。 ▍WLR-3Pの高度な設計と制御戦略研究者らは、次の要素を考慮しました: (a) 高い出力対重量比、(b) 優れた耐衝撃性、(c) 力/位置制御のための高周波応答、および (d) 動物に匹敵する生物学的特性人間。
WLR-3P の膝関節油圧駆動ユニット (HDU) の最大出力密度は約 7kW/kg に達する可能性があり、これは従来のモーターよりもはるかに高くなります。 書き換え内容: WLR-3P の膝油圧ドライブユニット (HDU) の最大出力密度は約 7 kW/kg で、従来のモーターを大幅に上回ります
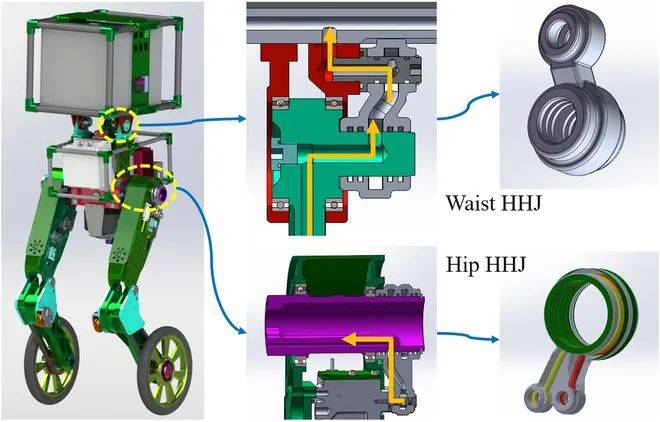
WLR-3PのヒップとウエストHHJ
油圧パワーユニット(HPU)の小型化と統合は、油圧ロボット研究分野における主な困難であり、主にポンプとエンジンの小型化、およびシステムの加熱が原因です。 WLR-3P には大きな HPU 設置スペースがありません。研究開発担当者は、HPU の小型化と統合を実現するための革新的な設計アイデアを提案しました。
まず、ギアポンプは、マイクロカップリングを介して特注のアウターローターモーターによって駆動されます。ポンプからの高圧オイルはマイクロ アキュムレータとフィルターを通過し、システムに必要な油圧力を供給します。次に、システムの発熱問題を解決するために、放熱、濾過、電圧安定化を統合した多機能燃料タンクを設計しました。最後に、HPU は最大圧力 21 MPa、流量 20 l/min の油圧を出力できます。
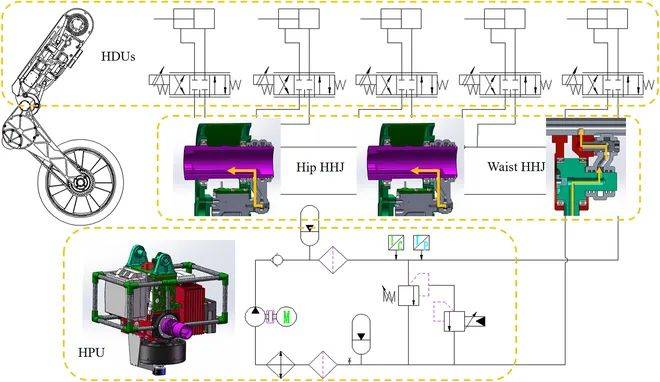
油圧システムの油圧回路図を完成させる必要があります
次の図は、HPU の構造と構成を示しています。 HPUの小型化と一体化により、ロボットはゴムホースの制約から解放され、ロボットの動きがより「滑らか」になります。
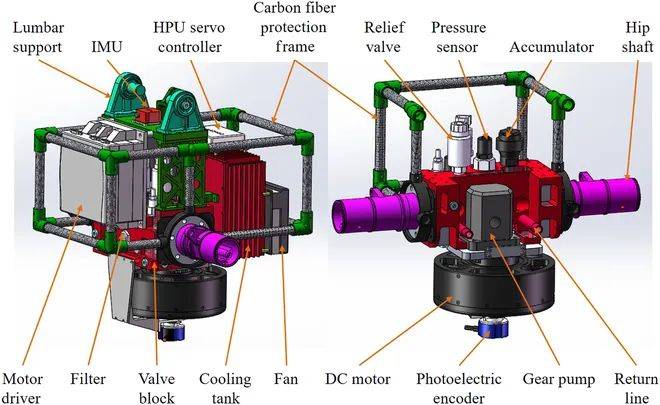
HPUの構造と構成はWLR-3Pの骨盤でもあります
さらに、研究開発チームは、階層型分散型電気システムと制御戦略を含む制御システム も提案しました:
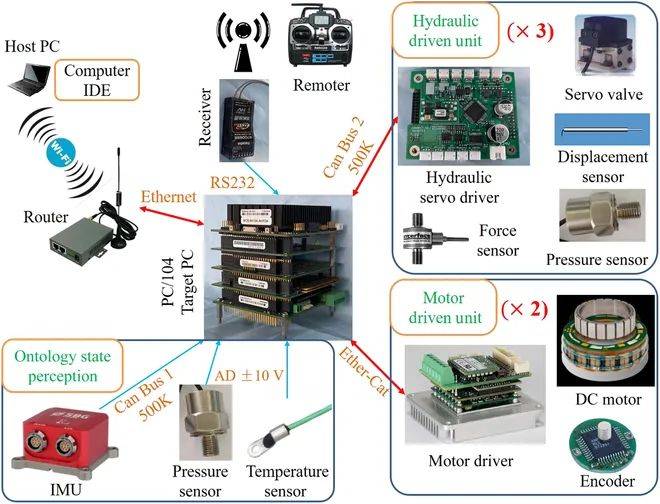
書き換えが必要な内容はWLR-3Pの電子システムです
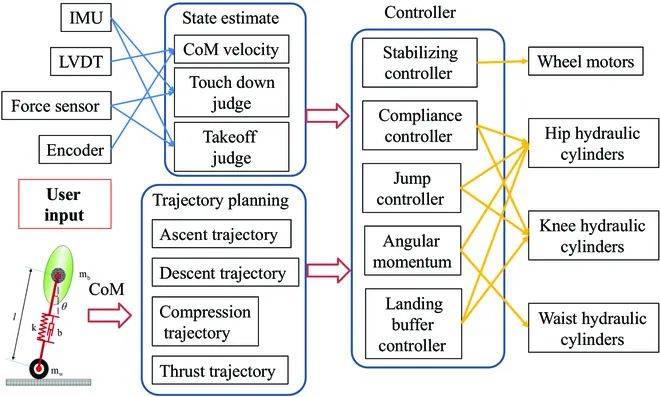
WLR-3P 制御フレームワーク
書き換えが必要な内容は、 ▍WLR-3Pのバランスと爆発力のテスト
です。研究者らは、バランスのとれたパフォーマンスと爆発力を中心にテストを実施しました。 素早い動きとしゃがむは、車輪脚ロボットのバランス性能を検証するための最も基本的な動作です。素早く移動すると、ロボットの重心 (COM) は水平方向に急速に変化し、しゃがむと COM は垂直方向に急速に変化します。
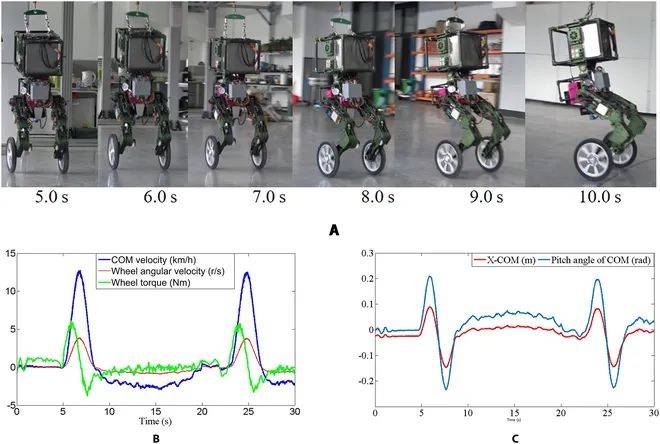
クイックモバイルテスト
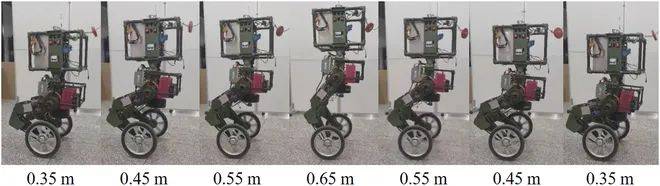
COM 高さ 0.35 ~ 0.65 m の範囲でのスクワットのスナップショット
このテストでは、WLR-3P の水平および垂直バランス機能に問題がないことが示され、ロボット ハードウェア システムの信頼性も検証されます。
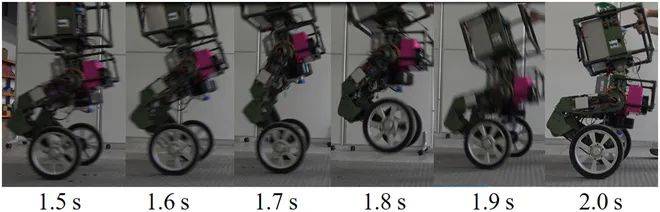
WLR-3P は離陸、飛行、着陸のプロセスを 0.5 秒で完了できます
実験結果は、ロボット WLR-3P が時速 13.6 km、ジャンプ高さ 0.2 m に達することができることを示しています。油圧ドライブとロボットの構造設定は完全に認定されています。

研究者らは実験経験を要約し、ロボットの重量が軽く、駆動システムの爆発力が強いほど、ロボットはより高くジャンプできることがわかりました。特に、体重に対する脚の重量の割合が小さいほど、膝関節の瞬間的な出力と速度が大きくなり、ロボットのジャンプ性能に大きな影響を与えます。
書き直す必要がある内容は次のとおりです: ▍WLR-3P の 2 人の「兄弟」
チームは、実際のパフォーマンスと理論上の設計パフォーマンスの間にはまだ一定のギャップがあるものの、これは今後の研究の方向性も示していると述べています。
2017 年、チームは初の油圧車輪脚ロボット WLR-I を開発し、その統合設計と複合運動機能の検証に成功しました。そして2018年、初のホースレス化を実現し、予想外の地形適応力を発揮した第2世代車輪脚ロボットWLR-Ⅱが登場しました。
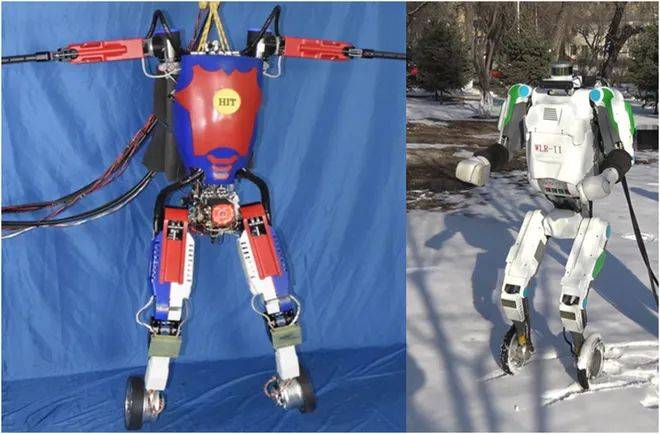
上の写真に示されているように、最初の 2 世代のロボットは、地上での複雑な地形への適応性と操縦性を実際に検証しましたが、それらはすべて外部のポンプ場によって動力を供給されています。今回のWLR-3Pは、最初の2世代の車輪脚ロボットの設計に基づいて大幅な改良を加えました。運動能力を向上させるだけでなく、パワーの自律性も実現します。
次に、チームは、HPU の出力電力と HDU に必要な電力を一致させる方法も検討する必要があります。駆動力やロボットの動作に対する要求については、放熱や騒音などの工学的な問題も考慮する必要があります。さらに重要なことに、油圧コンポーネントの小型化とカスタマイズも将来の研究方向の 1 つです。
効率が高すぎると言わざるを得ません。それなら、くだらない話をやめて、4番目の兄弟のWLRを待ちます。
以上がハルビン工業大学のこの車輪脚ロボットがバージョン 3.0 をリリースしました。設計、制御、性能テストをわかりやすく解説の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7510
7510
 15
1378
52
78
11
19
64
15
1378
52
78
11
19
64

 小紅書、AIチャットボット「ダヴィンチ」のテストを開始
Jan 15, 2024 pm 12:42 PM
小紅書、AIチャットボット「ダヴィンチ」のテストを開始
Jan 15, 2024 pm 12:42 PM
小紅書は人工知能機能を追加することで製品の充実に取り組んでおり、国内メディアの報道によると、小紅書はメインアプリで「Davinci」と呼ばれるAIアプリケーションを社内でテストしているという。このアプリケーションは、旅行ガイド、グルメガイド、地理的および文化的知識、ライフスキル、個人の成長、心理的構築などを含む、インテリジェントな質疑応答などの AI チャット サービスをユーザーに提供できると報告されています。はトレーニングに Meta A 製品の LLAMA モデルを使用しており、この製品は今年 9 月からテストされています。小紅書もAIのグループ会話機能の社内テストを行っていたという噂がある。この機能では、ユーザーはグループチャットでAIキャラクターを作成または紹介し、会話やインタラクションを行うことができます 画像出典:T
 C++ コードの「エラー: ')' トークンの前に主式が必要です」問題を解決する
Aug 27, 2023 pm 12:28 PM
C++ コードの「エラー: ')' トークンの前に主式が必要です」問題を解決する
Aug 27, 2023 pm 12:28 PM
C++ コードの「error:expectedprimary-expressionbefore')'token」問題を解決する C++ プログラミングでは、「expectedprimary-expressionbefore')'token」などのエラー プロンプトが表示されることがあります。このエラーは通常、コード内で使用されている構文または式が間違っており、コンパイラーがコードの意味を理解できないことが原因で発生します。この記事では、
 win11のネットワーク接続が空白になるのはなぜですか?
Jan 11, 2024 pm 06:21 PM
win11のネットワーク接続が空白になるのはなぜですか?
Jan 11, 2024 pm 06:21 PM
ネットワーク接続方法を変更しようとしたときに、一部のユーザーが、切り替えプロセス中に開いたネットワーク アダプタが空であることを誤って発見し、切り替え操作を正常に完了できなくなりました。このようなジレンマに直面して、この問題をどのように解決すればよいでしょうか? win11 で空のネットワーク接続に何が起こっていますか? 1. ドライバーの問題: コンピューターに搭載されているネットワーク アダプター ドライバーは、現在の環境またはバージョンと互換性がないか、または互換性がないように見えます。解決策: 対応するネットワーク アダプター ドライバーをアップグレードまたは再インストールします。 2. ハードウェアの問題: ネットワーク アダプターのハードウェアに物理的な損傷があるか、完全な障害が発生している場合もあります。解決策: 元のネットワーク アダプター ハードウェアを交換します。 3. システム設定の問題: コンピューター上の Win11 システム設定エラーの解決策:
 Lenovo Win10 ファイアウォールをオフにする方法. Lenovo Win10 ファイアウォールをオフにする方法を紹介します。
Jul 13, 2023 pm 01:33 PM
Lenovo Win10 ファイアウォールをオフにする方法. Lenovo Win10 ファイアウォールをオフにする方法を紹介します。
Jul 13, 2023 pm 01:33 PM
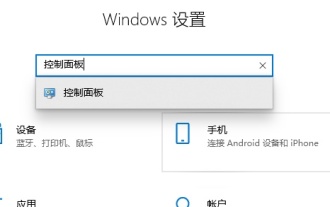
Lenovo Win10 ファイアウォールをオフにするにはどうすればよいですか?ファイアウォールは、ユーザーにより良い、より安全なコンピューター ネットワーク エクスペリエンスを提供します。最近、一部のユーザーから、Lenovo Win10 コンピューターでファイアウォールをオフにする方法について質問がありました。実際、その方法は非常に簡単です。エディターで操作方法を見てみましょう! Lenovo Win10 ファイアウォールをオフにする方法の紹介 1. [設定] をクリックし、[コントロール パネル] に入り、[コントロール パネル] を開きます。 2. 「Windows ファイアウォール」を見つけます。 3. 「Windows Defender ファイアウォールをオンまたはオフにする」をクリックします。 4. [閉じる] を選択して確認します。
 組み込みシステム開発における C++ マルチタスクおよびスケジューリング機能の実装スキル
Aug 27, 2023 pm 03:42 PM
組み込みシステム開発における C++ マルチタスクおよびスケジューリング機能の実装スキル
Aug 27, 2023 pm 03:42 PM
組み込みシステム開発における C++ マルチタスクおよびスケジューリング機能の実装スキル 組み込みシステムとは、他の機器に組み込まれて特定の機能として機能するコンピューター システムを指します。これらのシステムは通常、複数のタスクを同時に処理し、タスクの柔軟なスケジュールを実行する必要があります。組み込みシステム開発において、C++ は広く使用されているプログラミング言語であり、マルチタスクやスケジューリングのニーズを満たす多くの強力な機能を提供します。この記事では、組み込みシステムでマルチタスクとスケジューリングを実装するための C++ のテクニックをいくつか紹介し、コード例を通して説明します。
 コンピューターのCドライブがいっぱいのときにWin7システムをクリーンアップする方法
Jul 09, 2023 pm 04:05 PM
コンピューターのCドライブがいっぱいのときにWin7システムをクリーンアップする方法
Jul 09, 2023 pm 04:05 PM
win7 システムをしばらく実行した後、C ドライブのスペースがどんどん小さくなっていることがわかりました。C ドライブのスペースのサイズはシステムの速度に関係しています。 win7 システムの C ドライブが突然いっぱいになる状況に遭遇した場合、一部のユーザーはどうすればよいでしょうか? Windows 7コンピュータのCドライブをクリーンアップする方法を教えましょう。 1. Cドライブを右クリックし、「プロパティ」を選択すると以下の画面が表示されますので、「ディスク クリーンアップ」をクリックします。 2. 以下の画面が表示されたら、すべてを確認し、「OK」をクリックして、直接クリーニングします。 3. コンピュータを右クリックし、[プロパティ] - [システムの保護] の順にクリックし、[構成] をクリックして、[削除] を選択します。 4. タブを「詳細」に切り替えて、「設定」をクリックします。 5. 仮想メモリを設定し、「変更」をクリックします。 6. [すべてのドライブのページング ファイル サイズを自動的に管理する] チェック ボックスをオフにして、ドライブ C を選択し、[ページング ファイルなし] を選択して、仮想メモリ設定を次のように設定します。
 Windows 7 コントロール パネルを開く場所 Windows 7 コントロール パネルの開始部分の詳細な紹介
Jul 09, 2023 pm 12:45 PM
Windows 7 コントロール パネルを開く場所 Windows 7 コントロール パネルの開始部分の詳細な紹介
Jul 09, 2023 pm 12:45 PM
多くのユーザーは、Windows 7 コントロール パネルをどこで開くのか知りません。実際、Windows 7 コンピュータのコントロール パネルを開くのは非常に簡単です。まず、マウスを右クリックしてコンピュータのプロパティ ページを開きます。 Windows 7 のコントロール パネルを開くと、コンピューターの操作をより快適で便利にするための一連の設定を行うことができます。 Windows 7 コントロール パネルの開き方の詳細 1. コンピューターのデスクトップ アイコンを右クリックします。 2. [プロパティ] をクリックします。 3. コンピューターのプロパティが属するディレクトリで [コントロール パネル] をクリックします。 4. コントロール パネルの設定ページを開くことができます。
 JavaScript 関数テンプレート エンジン: HTML を動的に生成するための強力なツール
Nov 18, 2023 pm 12:41 PM
JavaScript 関数テンプレート エンジン: HTML を動的に生成するための強力なツール
Nov 18, 2023 pm 12:41 PM
JavaScript 関数テンプレート エンジン: HTML を動的に生成する強力なツール。フロントエンド開発では、HTML を動的に生成することが一般的な要件です。たとえば、ユーザーが入力した情報に基づいて検索結果を表示したり、Web サイトから受信したデータに基づいてページを動的にレンダリングしたりすることができます。背景など従来のフロントエンド開発では、通常、文字列の連結を使用して動的な HTML コードを生成します。ただし、この方法には、可読性が低い、エラーが発生しやすい、メンテナンスが難しいなど、多くの制限があります。 JavaScript 関数テンプレート エンジンは非常に優れています
