

PHP SOCKET 技术研究_PHP

今天试着写一个 PHP 与 C 语言通过socket通讯的程序,看过PHP手册,发现有好几种方式可以建立socket 客户端.
1、通过 fsockopen() 建立socket连接,然后用 用fputs() 发送消息,用 fgets() 接收消息。
2、通过 socket_create() 建立 socket 连接,然后用 socket_send() or socket_write() 发送消息,用 socket_recv() or socket_read() 发送消息。
很奇怪,我在手册上看到了这样一段话"本扩展模块是实验性的。该模块的行为,包括其函数的名称以及其它任何关于此模块的文档可能会在没有通知的情况下随 PHP 以后的发布而改变。我们提醒您在使用本扩展模块的同时自担风险。" 看来 php4.0 socket通讯还不是完全稳定。
今天我写的客户端要与服务端做两次通讯,我用上面这个方法都写了一个客户端程序,发现当仅仅就一次通讯的时候,也就是PHP客户端发送一次消息,然后接收返回消息,就关闭连接。这两种方法都能正确快速的实现功能,但当做两次通讯时,却有明显的差别,第一种方法第一次通讯特别快就结束了,这个我可以通过服务端的输出看出来,但是第二次通讯要等上好几分钟才能结束,我试了好几次都这样,我不太清楚我的程序哪里出错了,还是这个方式连接就是有问题,但是第二种方法做这两次通讯却很快,正确!完成的非常的。
最后我根据 第二种情况写了一个 class
////////////////ile Description ////////////////////
//Class Name : socket
//Version: V1.0
//Functional Outline: create socket,and send message to server
//Revision history: 2004/12/15 First version created
// Current : 2004/12/15 Liu ongsheng
///////////////////////////////////////////
class socket{
var $socket; //socket 句柄
var $sendflag = ">>>";
var $recvflag = " var $response;
var $debug = 1;
function socket($hostname,$port){
$address = gethostbyname($hostname);
$this->socket = socket_create(AF_INET,SOCK_STREAM,SOL_TCP);
$result = socket_connect($this->socket,$address,$port);
if($this->debug == 1){
if ($result echo "socket_connect() failed.\nReason: ($result) " . socket_strerror($result) . "
";
} else{
echo "connect OK.
";
}
}
}
function sendmsg($msg){
socket_write($this->socket,$msg,strlen($msg));
$result = socket_read($this->socket,100);
$this->response = $result;
if($this->debug == 1){
printf("%s $msg
",$this->sendflag);
printf("%s $result
",$this->recvflag);
}
return $result;
}
function close(){
socket_close($this->socket);
}
}

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7393
7393
 15
1630
14
1358
52
1268
25
1217
29
15
1630
14
1358
52
1268
25
1217
29

 メッセージを送信したが相手に拒否された場合は何を意味するのでしょうか?
Mar 07, 2024 pm 03:59 PM
メッセージを送信したが相手に拒否された場合は何を意味するのでしょうか?
Mar 07, 2024 pm 03:59 PM
メッセージを送信しましたが、相手に拒否されました これは、送信した情報はデバイスから正常に送信されましたが、何らかの理由で相手がメッセージを受信できなかったことを意味します。具体的には、通常、相手が特定の権限を設定しているか、特定のアクションを行っているため、あなたの情報が正常に受信されないことが原因です。
 モデル、データ、フレームワークの詳細: 効率的な大規模言語モデルの 54 ページにわたる徹底的なレビュー
Jan 14, 2024 pm 07:48 PM
モデル、データ、フレームワークの詳細: 効率的な大規模言語モデルの 54 ページにわたる徹底的なレビュー
Jan 14, 2024 pm 07:48 PM
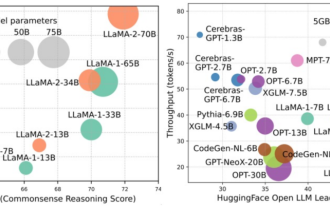
大規模言語モデル (LLM) は、自然言語理解、言語生成、複雑な推論などの多くの重要なタスクにおいて説得力のある能力を実証し、社会に大きな影響を与えてきました。ただし、これらの優れた機能には、大量のトレーニング リソース (左の図に示す) と長い推論時間 (右の図に示す) が必要です。したがって、研究者は効率の問題を解決するための効果的な技術的手段を開発する必要があります。さらに、図の右側からわかるように、Mistral-7B などのいくつかの効率的な LLM (LanguageModel) が、LLM の設計と展開にうまく使用されています。これらの効率的な LLM は、LLaMA1-33B と同様の精度を維持しながら、推論メモリを大幅に削減できます。
 Stable Diffusion 3 の論文がついに公開され、アーキテクチャの詳細が明らかになりましたが、Sora の再現に役立つでしょうか?
Mar 06, 2024 pm 05:34 PM
Stable Diffusion 3 の論文がついに公開され、アーキテクチャの詳細が明らかになりましたが、Sora の再現に役立つでしょうか?
Mar 06, 2024 pm 05:34 PM
StableDiffusion3 の論文がついに登場しました!このモデルは2週間前にリリースされ、Soraと同じDiT(DiffusionTransformer)アーキテクチャを採用しており、リリースされると大きな話題を呼びました。前バージョンと比較して、StableDiffusion3で生成される画像の品質が大幅に向上し、マルチテーマプロンプトに対応したほか、テキスト書き込み効果も向上し、文字化けが発生しなくなりました。 StabilityAI は、StableDiffusion3 はパラメータ サイズが 800M から 8B までの一連のモデルであると指摘しました。このパラメーター範囲は、モデルを多くのポータブル デバイス上で直接実行できることを意味し、AI の使用を大幅に削減します。
 自動運転と軌道予測についてはこの記事を読めば十分です!
Feb 28, 2024 pm 07:20 PM
自動運転と軌道予測についてはこの記事を読めば十分です!
Feb 28, 2024 pm 07:20 PM
自動運転では軌道予測が重要な役割を果たしており、自動運転軌道予測とは、車両の走行過程におけるさまざまなデータを分析し、将来の車両の走行軌跡を予測することを指します。自動運転のコアモジュールとして、軌道予測の品質は下流の計画制御にとって非常に重要です。軌道予測タスクには豊富な技術スタックがあり、自動運転の動的/静的知覚、高精度地図、車線境界線、ニューラル ネットワーク アーキテクチャ (CNN&GNN&Transformer) スキルなどに精通している必要があります。始めるのは非常に困難です。多くのファンは、できるだけ早く軌道予測を始めて、落とし穴を避けたいと考えています。今日は、軌道予測に関するよくある問題と入門的な学習方法を取り上げます。関連知識の紹介 1. プレビュー用紙は整っていますか? A: まずアンケートを見てください。
 DualBEV: BEVFormer および BEVDet4D を大幅に上回る、本を開いてください!
Mar 21, 2024 pm 05:21 PM
DualBEV: BEVFormer および BEVDet4D を大幅に上回る、本を開いてください!
Mar 21, 2024 pm 05:21 PM
この論文では、自動運転においてさまざまな視野角 (遠近法や鳥瞰図など) から物体を正確に検出するという問題、特に、特徴を遠近法 (PV) 空間から鳥瞰図 (BEV) 空間に効果的に変換する方法について検討します。 Visual Transformation (VT) モジュールを介して実装されます。既存の手法は、2D から 3D への変換と 3D から 2D への変換という 2 つの戦略に大別されます。 2D から 3D への手法は、深さの確率を予測することで高密度の 2D フィーチャを改善しますが、特に遠方の領域では、深さ予測に固有の不確実性により不正確さが生じる可能性があります。 3D から 2D への方法では通常、3D クエリを使用して 2D フィーチャをサンプリングし、Transformer を通じて 3D と 2D フィーチャ間の対応のアテンション ウェイトを学習します。これにより、計算時間と展開時間が増加します。
 SD コミュニティの I2V アダプター: 設定不要、プラグアンドプレイ、Tusheng ビデオ プラグインと完全に互換性あり
Jan 15, 2024 pm 07:48 PM
SD コミュニティの I2V アダプター: 設定不要、プラグアンドプレイ、Tusheng ビデオ プラグインと完全に互換性あり
Jan 15, 2024 pm 07:48 PM
画像からビデオへの生成 (I2V) タスクは、静止画像を動的なビデオに変換することを目的としたコンピューター ビジョンの分野における課題です。このタスクの難しさは、画像コンテンツの信頼性と視覚的な一貫性を維持しながら、単一の画像から時間次元で動的な情報を抽出して生成することです。既存の I2V 手法では、多くの場合、この目標を達成するために複雑なモデル アーキテクチャと大量のトレーニング データが必要になります。最近、Kuaishou が主導した新しい研究成果「I2V-Adapter: AGeneralImage-to-VideoAdapter for VideoDiffusionModels」が発表されました。この研究では、革新的な画像からビデオへの変換方法を導入し、軽量のアダプター モジュールを提案します。
 VPR 2024 満点用紙! Meta は EfficientSAM を提案しています。すべてを素早く分割します。
Mar 02, 2024 am 10:10 AM
VPR 2024 満点用紙! Meta は EfficientSAM を提案しています。すべてを素早く分割します。
Mar 02, 2024 am 10:10 AM
EfficientSAM のこの作品は、5/5/5 の満点を獲得して CVPR2024 に収録されました。下の写真に示すように、著者は結果をソーシャル メディアで共有しました。ルカン チューリング賞受賞者もこの作品を強く推薦しました。最近の研究で、メタ研究者は、SAM を使用したマスク画像事前トレーニング (SAMI) という新しい改良された方法を提案しました。この方法では、MAE 事前トレーニング テクノロジーと SAM モデルを組み合わせて、高品質の事前トレーニングされた ViT エンコーダーを実現します。 SAMI を通じて、研究者はモデルのパフォーマンスと効率を向上させ、視覚タスクにより良いソリューションを提供しようとしています。この手法の提案は、コンピューター ビジョンとディープ ラーニングの分野をさらに探索し、発展させるための新しいアイデアと機会をもたらします。異なるものを組み合わせることで
 Google AI の新星が Pika に乗り換え: ビデオ生成の Lumiere が創設科学者を務める
Feb 26, 2024 am 09:37 AM
Google AI の新星が Pika に乗り換え: ビデオ生成の Lumiere が創設科学者を務める
Feb 26, 2024 am 09:37 AM
ビデオ生成は本格的に進歩しており、Pika は偉大な将軍、Pika の創設科学者を務める Google 研究者の Omer Bar-Tal を迎えました。 1か月前、Googleが共著者としてビデオ生成モデルLumiereをリリースしましたが、その効果は素晴らしかったです。当時、ネチズンは次のように述べました。「Google がビデオ生成の戦いに参加し、また見るべき良い番組ができた。」 StabilityAI CEOやGoogleの元同僚など、業界関係者の中には祝福の声が寄せられた。 Lumiere の最初の作品である Omer Bar-Tal は、修士号を取得して卒業したばかりで、2021 年にテルアビブ大学の数学およびコンピュータ サイエンス学部を卒業し、その後ワイツマン科学大学に進学してコンピュータの修士号を取得しました。科学、主に画像とビデオの合成分野の研究に焦点を当てています。彼の論文の結果は何度も出版されています
