

Microsoft AR/VR 特許は、マルチカメラ画像の位置合わせに角度と線の特徴を使用することを提案しています

MR システムは複数のカメラを使用できますが、レンダリング時に画像を位置合わせする必要があります。ただし、画像の位置合わせは難しい問題です。そこで、Microsoft は「コーナーとラインの特徴を使用した画像位置合わせ方法」というタイトルの特許出願で、解決策を提案しました
もちろん、業界では画像の位置合わせにコーナー機能を使用する方法がすでにあります。ただし、画像内の角を識別し、識別された角に基づいて画像を位置合わせすることは、時間がかかり、計算量が多い操作です。
Microsoft が提案しているのは、より優れた特徴マッチングを実現できる、より効果的な改善テクノロジです。本発明は主に、角特徴と線特徴を使用して視覚的位置合わせを実行するハイブリッド方法を導入し、この解決策により位置合わせプロセスに必要な制約が少なくなり、それによって計算効率と特徴マッチングが向上する。
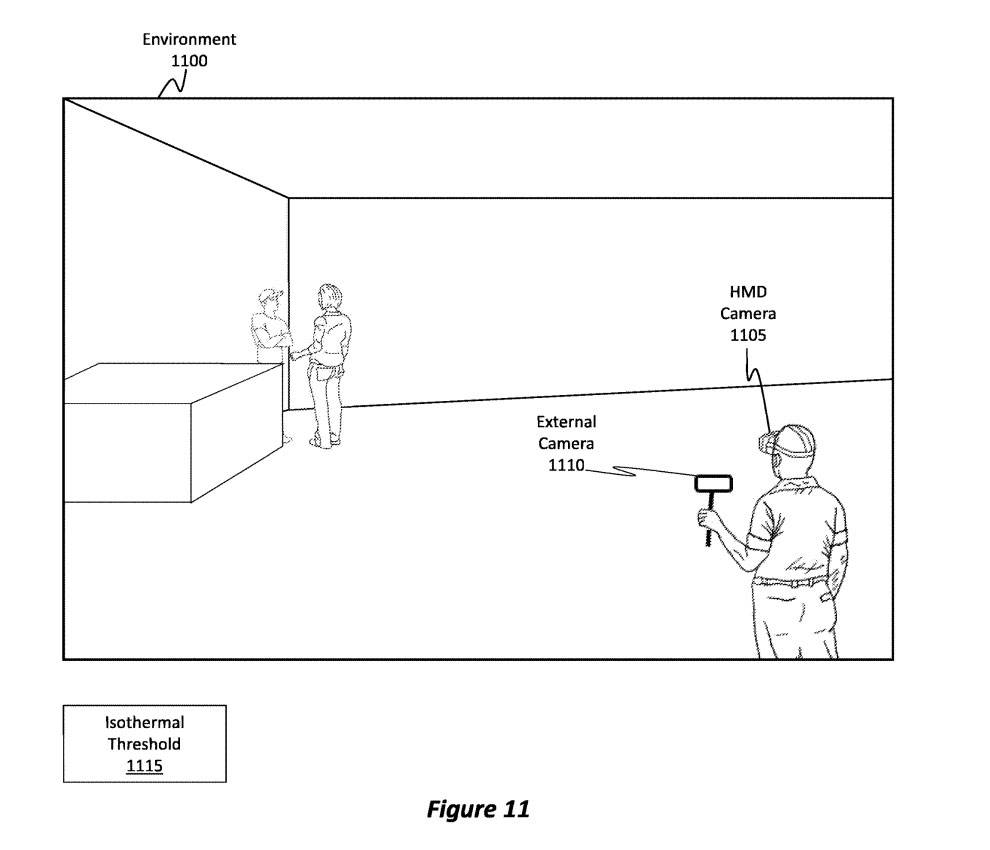
たとえば、深夜に物体が冷えた後、環境の温度勾配は通常均一になる可能性があります。この場合、環境の温度プロファイルまたは温度勾配は、特定の等温閾値1115を下回る可能性がある。この場合、コンテンツを調整するための従来の手法は失敗する可能性があります。マイクロソフトによって説明された実施形態は、そのようなシナリオに対する解決策を提供する。
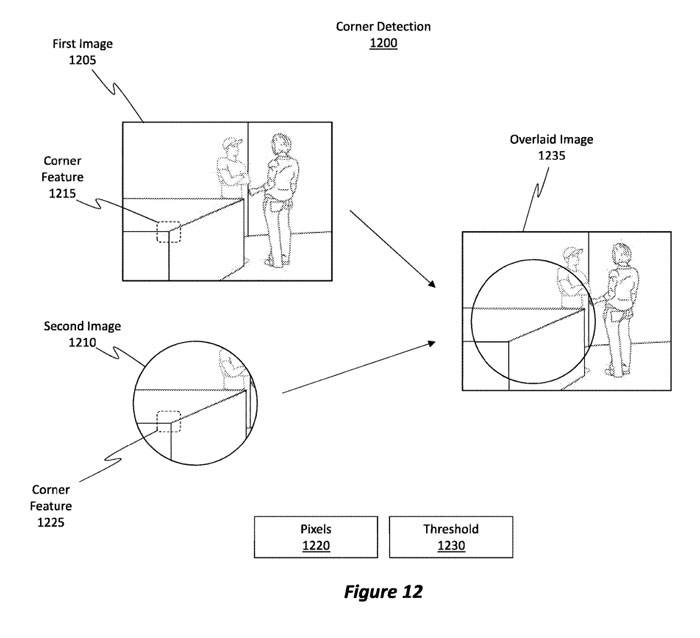
コーナー検出操作を実行して、画像内に存在する「コーナー」を識別します。例えば、実施形態は、第1の画像内の隅の特徴を識別するために使用され得る。言い換えれば、画像内でピクセルのセットを識別し、角度に対応するものと判断できます。
「コーナー」とは、不均一な強度の1つまたは複数のピクセルを指し、その1つまたは複数のピクセルに対して水平に配置され、第2の隣接ピクセルブロックの1つまたは複数のピクセルに対して垂直に配置された第1の近隣ピクセルブロックを有する。 。言い換えれば、コーナーは、ピクセルのセットに対して X および Y 方向で隣接するコーナーと対照をなす 1 つ以上のピクセルのセットとして定義されます。
第1の画像1205内のコーナー特徴1215を特定し、また、第2の画像1210内のコーナー特徴も特定する。したがって、コーナー特徴1225は首尾よく識別される。角度特徴 1225 と角度特徴 1215 は対応していることに注意してください。 ####画像コンテンツを位置合わせするために、この実施形態は、1230隅の閾値を識別するという任務を負っている。コーナーの閾値数は互いに対応している必要があります。換言すれば、第1の画像1205で識別された複数の角が識別されなければならず、第2の画像1210###で識別された複数の角に対応しなければならない。 #### これらの閾値が満たされる場合、実施形態は、画像位置合わせ動作を実行して、第2の画像1210からのコンテンツが位置合わせされ、その後、第1の画像1205からの対応するコンテンツとオーバーレイされる画像であるオーバーレイ画像1235を生成することができる。
コーナーの検出と位置合わせの実行は計算負荷の高い操作であり、検出されたコーナーと画像の一致が十分でない場合、プロセス全体が失敗する可能性があります。たとえば、コーナー ポイントのみを使用する方法では、1 つの画像から少なくとも 5 つのコーナー ポイントを特定し、それらを 2 番目の画像内の対応するコーナー ポイントと照合する必要があります。低コントラストの条件下では、対応する 5 つのコーナー ポイントを特定することさえ困難になる可能性があります
#### 十分な数の角を特定した後、実施形態は、5つの角を互いに位置合わせするために様々な回転および変換を実行することによって第1または第2の画像からの画像内容を適応させるために、運動モデルを使用して3D回転を特定する。画像。このような調整を実行すると、大量の計算が必要になります。したがって、角度メソッドのみを使用する場合に存在する制約を減らす必要があります。図 13 はそのようなテクニックを示しています。
図13は、コーナー点およびライン点検出1300のプロセスを示す。このプロセスには、図12のコーナー点検出1200動作とライン点検出動作の組み合わせが含まれる。コーナー検出動作とライン検出動作は同時に実行されることに注意してください。
通常、画像内の角を識別するよりも対応する「線」を識別する方が簡単なので、通常、線検出プロセスは角検出プロセスよりも高速です。 2 つのプロセスは並行して実行でき、ライン検出プロセスの方が高速であるため、ライン検出プロセスを追加しても、位置合わせプロセス全体の速度に悪影響はありません
ラインを組み合わせて画像を位置合わせすると、位置合わせプロセス中に使用する角の数が減り、制約が緩和され、全体的に位置合わせが容易になります。特に低温条件では、コーナーを見つけて一致させるのが難しいため、使用するコーナーの数を減らすことは非常に有益です。
「ライン」は、1 つ以上のピクセルのセットとして定義されます。これらのピクセルは、ピクセルのセットの水平方向に位置する最初の近くのピクセル ブロックに対して均一な強度を持ち、また、1 つのピクセルのセットに対して均一な強度を持ちます。ピクセル セットの垂直方向に位置する 2 番目に近いピクセル ブロックの強度が不均一です。あるいは、それらは、1つまたは複数のピクセルのセットの水平方向に位置する第1の近傍ピクセルブロックに関しては不均一な強度を有し、1つまたは複数のピクセルのセットに関して垂直方向に位置する第2の近傍ピクセルブロックに関しては均一な強度を有する。 # #### 図13には、図12の画像を表す第1の画像1305および第2の画像1310が示されている。図13は、第1の画像1305内のコーナー特徴1315##を検出できる実装方法も示している。最初の画像 1305 上でコーナー特徴を検出すると、線特徴 1320 および 1325 に示すように、線特徴も同時に検出されます。一般的に言えば、検出できる角の数に比べて、より多くの線を検出できます
2 番目の画像 1310 で角度と線の操作を実行します。例示の目的で、実施形態はコーナー特徴1330を特定する。コーナー検出動作と並行して、実施形態は、線特徴1335および線特徴1340など、第2の画像1310内の線を同時に検出する。
コーナー フィーチャ 1330 はコーナー フィーチャ 1315 に対応し、ライン フィーチャ 1335 はライン フィーチャ 1320 に対応することに注意してください。ライン フィーチャ 1340 はライン フィーチャ 1325 に対応します。実施形態は、これらの対応関係を識別し、次に、これらの特徴点を互いに位置合わせするのに適した運動モデルを生成または使用することができる###
発明の原理に従って、最初のしきい値を 1345 と定義しました。最初のしきい値は、2 つの画像を位置合わせするためにこれらの画像内で識別する必要がある、対応する角度特徴の数を指します。同時に、2 番目のしきい値 1350 も定義します。 2 番目のしきい値は、2 つの画像を揃えるために 2 つの画像内で識別する必要がある、対応する行特徴の数を指します。 ###第1の閾値1345および第2の閾値1350が満たされると、実施形態は第1の画像1305および第2の画像1310からのコンテンツを位置合わせしてオーバーレイ画像1355を生成することができる。通常、しきい値は、認識する必要があるコーナーとラインの合計数を指すことに注意してください。###ライン特徴検出を実行する利便性と速度を理解した後、なぜ実施形態がライン検出動作のみに依存し、コーナー検出動作の実行を回避するのか疑問に思うかもしれない。その理由は、画像内の線を検出すると絞りの問題が発生するためです。
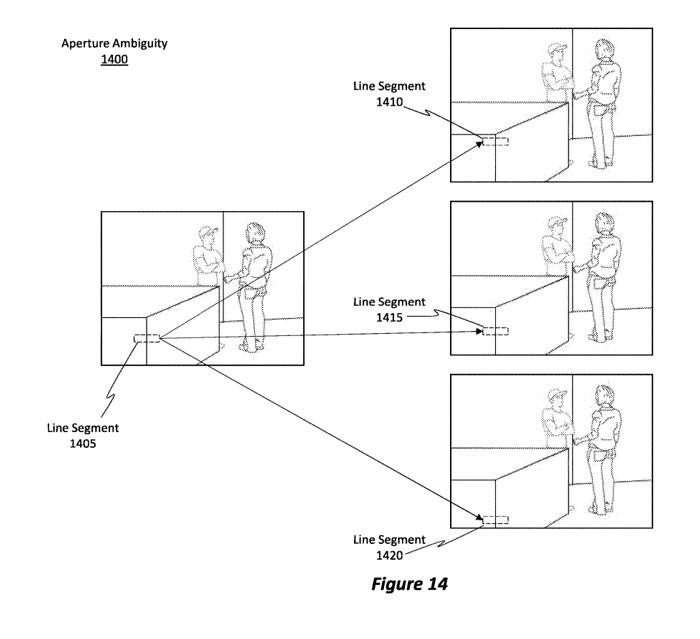
書き換えられた内容は次のとおりです。 図 14 によれば、アパーチャの問題、つまりアパーチャの曖昧性が 1400 であることがわかります。図14では、線分1405は線全体の一部である。開口曖昧性 1400 は、線の複数の異なる部分が (ただし不正確に) 識別された線分 1405
に関連している可能性があるという事実を指します。 ###たとえば、線分1410は、実際には間違った位置または場所にあるにもかかわらず、線分1405と一致するピクセルのブロックである可能性がある。同様に、線分1415または線分1420は、線分1405内のピクセルをマッピングまたは一致させるピクセルのブロックを含むことができる。このようなシナリオでは、調整プロセスに曖昧さが生じます。
したがって、線検出プロセス自体に依存するだけでは十分な技術ではありません。換言すれば、線と角度の組み合わせに依存することにより、実施形態は緩和された制約を使用することができ、それによって計算効率が向上する。
プロセスフロー例1500を図15に示す。最初に、頭部装着カメラ画像1505および外部カメラ画像1510などの画像のセットが取得される。これらの画像は熱画像である可能性があります。画像内の温度勾配またはコントラスト1520は、特定のコントラスト閾値1525を下回る可能性がある。したがって、画像内の十分な数のコーナーを識別することは非常に困難な場合があります。この場合、ハイブリッド アプローチを利用して角と線の組み合わせを検出し、位置合わせを行うことができます
ヘッドマウントカメラ画像1505と外部カメラ画像1510を角度検出器1530とライン検出器1535に送信する。これら2つの検出器は同時に動作し、相互に依存しない
### ライン検出器1535は一般に、角度の検出においてコーナー検出器1530よりもラインの検出が速いことに留意されたい。つまり、ライン検出器1535の遅延時間は、角度検出器1530の遅延時間よりも短い。
コーナー検出器1530は、2つの画像を分析し、画像内のコーナー点1545を識別する。同様に、線検出器1535は2つの画像を分析し、画像内の線1550を識別する。次に、実施形態は、2つの画像内の対応する角および線を識別することによって位置合わせ1555を実行する。位置合わせを実行するには、ラインとコーナーのしきい値を決定する必要があります。一致するしきい値は、コーナーまたはラインの数を識別するためのしきい値よりも関連性があります。次に、実施形態は、識別された角および線を運動モデルなどの3Dモデル1560に適合させる。次いで、モデルフィッティング1565操作がモデル1560に対して実行され、一方の画像を回転、平行移動、および/または変換して、他方の画像内の対応する角および線を一致または整列させる。
言い換えれば、再投影操作を実行するとき、実施形態は、特定された角および線を使用して、ある画像のコンテンツを別の画像のコンテンツと位置合わせする
関連特許: Microsoft 特許 | コーナーおよびライン機能を使用した画像の位置合わせ「コーナーとラインの特徴を使用した画像の位置合わせ」というタイトルの Microsoft 特許出願は、2022 年 2 月に最初に提出され、最近米国特許商標庁によって公開されました。
以上がMicrosoft AR/VR 特許は、マルチカメラ画像の位置合わせに角度と線の特徴を使用することを提案していますの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7562
7562
 15
1384
52
84
11
28
99
15
1384
52
84
11
28
99

 Microsoft bing国際版入口アドレス(bing検索エンジン入口)
Mar 14, 2024 pm 01:37 PM
Microsoft bing国際版入口アドレス(bing検索エンジン入口)
Mar 14, 2024 pm 01:37 PM
Bing は Microsoft が提供するオンライン検索エンジンで、検索機能が非常に強力で、国内版と海外版の 2 つの入り口があります。これら 2 つのバージョンへの入り口はどこですか?国際版にアクセスするにはどうすればよいですか?以下で詳細を見てみましょう。 Bing 中国語版 Web サイトの入り口: https://cn.bing.com/ Bing 国際版 Web サイトの入り口: https://global.bing.com/ Bing 国際版にアクセスするにはどうすればよいですか? 1. まず URL を入力して Bing を開きます: https://www.bing.com/ 2. 国内バージョンと国際バージョンのオプションがあることがわかりますので、国際バージョンを選択してキーワードを入力するだけです。
 Microsoft、Win11 8月累積アップデートをリリース:セキュリティの向上、ロック画面の最適化など。
Aug 14, 2024 am 10:39 AM
Microsoft、Win11 8月累積アップデートをリリース:セキュリティの向上、ロック画面の最適化など。
Aug 14, 2024 am 10:39 AM
8 月 14 日のこのサイトのニュースによると、今日の 8 月のパッチ火曜日イベント日に、Microsoft は 22H2 および 23H2 用の KB5041585 更新プログラム、および 21H2 用の KB5041592 更新プログラムを含む、Windows 11 システム用の累積的な更新プログラムをリリースしました。 8 月の累積更新プログラムで上記の機器がインストールされた後、このサイトに添付されるバージョン番号の変更は次のとおりです。 21H2 機器のインストール後、機器のインストール後、バージョン番号は Build22000.314722H2 に増加しました。バージョン番号は Build22621.403723H2 に増加しました。 装置のインストール後、バージョン番号は Build22631.4037 に増加しました。 Windows 1121H2 の更新プログラムの主な内容は次のとおりです。 改善: 改善されました。
 Microsoft Edgeアップグレード:自動パスワード保存機能が禁止? !ユーザーはショックを受けました!
Apr 19, 2024 am 08:13 AM
Microsoft Edgeアップグレード:自動パスワード保存機能が禁止? !ユーザーはショックを受けました!
Apr 19, 2024 am 08:13 AM
4 月 18 日のニュース: 最近、Canary チャネルを使用している Microsoft Edge ブラウザーの一部のユーザーが、最新バージョンにアップグレードした後、パスワードを自動的に保存するオプションが無効になっていることに気づいたと報告しました。調査の結果、これは機能のキャンセルではなく、ブラウザのアップグレード後の軽微な調整であることが判明しました。 Edge ブラウザを使用して Web サイトにアクセスする前に、Web サイトのログイン パスワードを保存するかどうかを尋ねるウィンドウがブラウザにポップアップ表示されるとユーザーが報告しました。保存を選択すると、Edge は次回ログインするときに保存されたアカウント番号とパスワードを自動的に入力するため、ユーザーは非常に便利になります。しかし、最新のアップデートはデフォルト設定を変更する微調整に似ています。ユーザーはパスワードを保存することを選択し、設定で保存されたアカウントとパスワードの自動入力を手動でオンにする必要があります。
 Microsoft の全画面ポップアップは、Windows 10 ユーザーに急いで Windows 11 にアップグレードするよう促します
Jun 06, 2024 am 11:35 AM
Microsoft の全画面ポップアップは、Windows 10 ユーザーに急いで Windows 11 にアップグレードするよう促します
Jun 06, 2024 am 11:35 AM
6 月 3 日のニュースによると、Microsoft はすべての Windows 10 ユーザーに全画面通知を積極的に送信し、Windows 11 オペレーティング システムへのアップグレードを奨励しています。この移行には、ハードウェア構成が新しいシステムをサポートしていないデバイスが含まれます。 2015 年以来、Windows 10 は市場シェアの 70% 近くを占め、Windows オペレーティング システムとしての優位性を確固たるものにしました。しかし、そのシェアは82%を大きく上回り、2021年に発売されるWindows 11のシェアを大きく上回っている。 Windows 11 は発売から 3 年近く経ちますが、市場への浸透はまだ遅いです。 Microsoft は、Windows 10 の技術サポートを 2025 年 10 月 14 日以降に終了すると発表しました。
 Microsoft Win11 の 7z および TAR ファイルを圧縮する機能は、24H2 バージョンから 23H2/22H2 バージョンにダウングレードされました
Apr 28, 2024 am 09:19 AM
Microsoft Win11 の 7z および TAR ファイルを圧縮する機能は、24H2 バージョンから 23H2/22H2 バージョンにダウングレードされました
Apr 28, 2024 am 09:19 AM
4 月 27 日のこのサイトのニュースによると、Microsoft は今月初めに Windows 11 Build 26100 プレビュー バージョン アップデートを Canary チャネルと Dev チャネルにリリースしました。これは Windows 1124H2 アップデートの RTM バージョンの候補になると予想されています。新バージョンの主な変更点は、ファイルエクスプローラー、Copilotの統合、PNGファイルメタデータの編集、TARおよび7z圧縮ファイルの作成など。 @PhantomOfEarth は、Microsoft が TAR および 7z 圧縮ファイルの作成など、24H2 バージョン (ゲルマニウム) の一部の機能を 23H2/22H2 (ニッケル) バージョンに継承していることを発見しました。図に示すように、Windows 11 は TAR のネイティブ作成をサポートします。
 Microsoft Edge ブラウザーのアップデート: ユーザー エクスペリエンスを向上させるために「画像のズームイン」機能を追加しました
Mar 21, 2024 pm 01:40 PM
Microsoft Edge ブラウザーのアップデート: ユーザー エクスペリエンスを向上させるために「画像のズームイン」機能を追加しました
Mar 21, 2024 pm 01:40 PM
3月21日のニュースによると、Microsoftは最近ブラウザ「Microsoft Edge」をアップデートし、実用的な「画像拡大」機能を追加した。 Edge ブラウザを使用している場合、ユーザーは画像を右クリックするだけで、ポップアップ メニューでこの新機能を簡単に見つけることができます。さらに便利なのは、ユーザーが画像の上にカーソルを置き、Ctrl キーをダブルクリックして、画像をズームインする機能をすぐに呼び出すこともできることです。編集者の理解によれば、新しくリリースされた Microsoft Edge ブラウザーは、Canary チャネルで新機能についてテストされています。安定版ブラウザでは、実用的な「画像拡大」機能も正式に開始し、より便利な画像閲覧体験をユーザーに提供しています。海外の科学技術メディアも注目
 Microsoft Z1000 SSDがオンラインに登場、謎のCNEXLabsコントローラーを搭載
Mar 11, 2024 pm 01:50 PM
Microsoft Z1000 SSDがオンラインに登場、謎のCNEXLabsコントローラーを搭載
Mar 11, 2024 pm 01:50 PM
3 月 11 日のこの Web サイトのニュースによると、情報源の Yuki Yaso-YuuKi_AnS は最近、X プラットフォーム上の Microsoft Z1000 ソリッド ステート ドライブ サンプルの一連の写真を共有しました。ラベル情報から、この Z1000 は、2020 年 5 月 18 日に製造された、容量 960GB の Engineering Sample (エンジニアリング サンプル) であることがわかりました。情報源によると、NVMe1.2プロトコルをサポートしているという。 ▲Microsoft Z1000 SSD の前面写真 (ラベルあり) ▲Microsoft Z1000 SSD の前面写真 (ラベルなし) ▲Microsoft Z1000 SSD の背面写真 ▲Microsoft Z1000 SSD の背面写真 - メイン コントロールのクローズアップ リファレンス ゆうきやすほ-YuuKi_An
 Microsoftは、2024年後半にWindows 11でNTLMを段階的に廃止し、Kerberos認証に完全に移行する予定です
Jun 09, 2024 pm 04:17 PM
Microsoftは、2024年後半にWindows 11でNTLMを段階的に廃止し、Kerberos認証に完全に移行する予定です
Jun 09, 2024 pm 04:17 PM
2024 年後半、マイクロソフトの公式セキュリティ ブログは、セキュリティ コミュニティからの呼びかけに応えてメッセージを公開しました。同社は、セキュリティを向上させるために、2024 年後半にリリースされる Windows 11 から NTLAN Manager (NTLM) 認証プロトコルを廃止する予定です。これまでの説明によれば、マイクロソフトは以前にも同様の動きを行っているという。昨年 10 月 12 日、Microsoft は公式プレス リリースで、NTLM 認証方法を段階的に廃止し、より多くの企業とユーザーに Kerberos への切り替えを促すことを目的とした移行計画を提案しました。 NTLM 認証をオフにした後にハードウェア接続されたアプリケーションやサービスで問題が発生する可能性がある企業を支援するために、Microsoft は IAKerb と
