
 テクノロジー周辺機器
AI
生産および組立における人間と機械のコラボレーションの実現: WIMI ホログラフィック開発組立とブレイン コンピュータ インターフェイスに基づくハンドガイド制御技術
テクノロジー周辺機器
AI
生産および組立における人間と機械のコラボレーションの実現: WIMI ホログラフィック開発組立とブレイン コンピュータ インターフェイスに基づくハンドガイド制御技術
生産および組立における人間と機械のコラボレーションの実現: WIMI ホログラフィック開発組立とブレイン コンピュータ インターフェイスに基づくハンドガイド制御技術

現代の製造業では、技術の継続的な革新と開発により、生産プロセスに新たな可能性がもたらされています。近年、小型機械の一種である協働ロボット(コボット)は、さまざまな作業を行うだけでなく、人間と協働して生産効率を効果的に向上させることができます。生産バッチ数が少なく、作業が多く複雑である中小企業の特性を考慮して、WIMIは生産に新たな展望をもたらす「ブレイン・コンピュータ・インターフェースに基づく組立および手動制御技術」という画期的なソリューションを開発しました。分野。 ###
従来の生産プロセスでは、特に複雑なタスクと高い再現性を伴う環境では、オペレーターに多大な体力とエネルギーの投資が必要となることが多く、オペレーターの疲労やエラーの増加につながりやすいです。協働ロボットの導入は、企業に新たな機会をもたらしました。協働ロボットは、コンパクトなサイズとプログラム可能な機能により、さまざまな作業を実行でき、オペレーターの作業負荷を軽減し、生産効率を向上させることができます。特に中小企業にとって、この技術の導入は重要な競争上の優位性となります。人間と協働ロボットの間で効率的なコミュニケーションと協力を実現するためには、適切なタスクと対話戦略をどのように設計するかが重要な問題となります。この問題を解決するために、WIMIは、ブレイン・コンピュータ・インタフェース技術を通じて協働ロボットに対するオペレータのコマンド制御を実現する、ブレイン・コンピュータ・インタフェースに基づく戦略を提案した。
WIMIのホログラフィック技術は、ブレイン・コンピュータ・インターフェースに基づく組み立てとハンドガイド制御を実現し、ブレイン・コンピュータ・インターフェース技術において重要な役割を果たしています。ブレイン コンピューター インターフェイス (BCI) は、脳の活動を検出し、コンピューターが理解できる命令に変換するテクノロジーです。この技術では、オペレータは定常状態視覚誘発電位(SSVEP)法を通じて協働ロボットにコマンドを送信することができます。このアプローチにより、オペレーターは手を使わずにミッション モードを切り替えることができます。また、本技術では手動誘導制御も導入しており、協働ロボットの手首に六分力センサを搭載することで、協働ロボットの手誘導制御を実現します。
生産組立の全プロセスにおいて、タスクの切り替えとフェーズの同期が重要です。 WIMI のブレイン コンピューター インターフェイス ベースのアセンブリおよびハンドガイド制御テクノロジーは、コラボレーション プロセスを独立したステージとサポート ステージに分割します。独立フェーズでは、ロボットとオペレーターは共通のシナリオで作業し、さまざまなタスクを完了します。オペレーターがロボットの助けを必要とすると、サポート段階に切り替えて人間と機械の協調操作を実現できます。この切り替えは、オペレーターがブレイン・コンピューター・インターフェース・インターフェースでコマンド・メッセージを送信することによって実現され、それによってロボットに切り替えの意図を事前に通知します。
さらに、WIMI ホログラフィック ブレイン コンピュータ インターフェイスのアセンブリとハンドガイド制御技術は、実用的なアプリケーションにおける完全なフレームワークを提供します。オペレーターはインターフェースを通じて協働ロボットと対話できます。ブレイン・コンピュータ・インターフェース関連の活動では、オペレータが画像を観察することによってロボットのコマンド制御を実現し、そのコマンドは電極によって収集・処理された後、ロボットコントローラに参照されます。一方、手動誘導制御では、オペレータはロボットの手首にあるセンサーを介してロボットを誘導できます。組み立てプロセス全体の流れは、事前にプログラムされたロボットのサブタスクと、オペレーターが発行するリアルタイムのコマンドによって決まります。オペレータの意図から協働ロボットが実際に動作するまでの全プロセス。このプロセスには、オペレーターの意図をロボットの動作に正確に変換するための複数のリンクとテクノロジーが含まれており、それによって効率的な人間と機械の協調動作が実現されます。
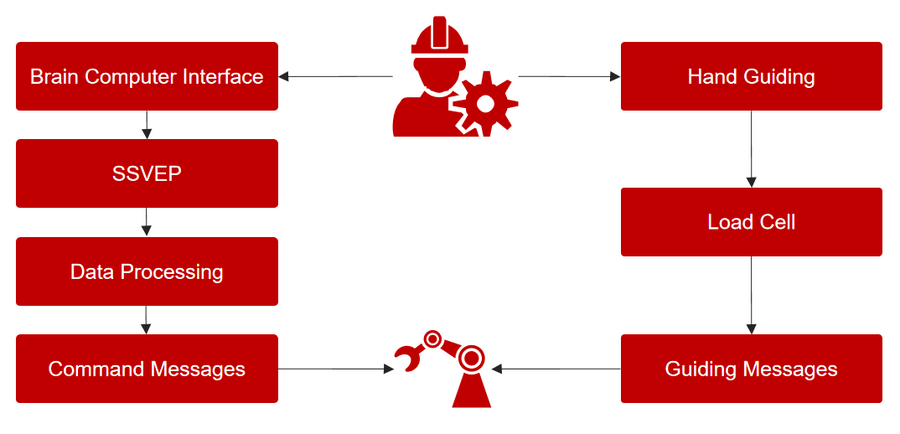 ブレイン・コンピュータ・インターフェース技術 (BCI) の応用: ブレイン・コンピュータ・インターフェース技術は技術パスの中核です。この技術では、オペレータの脳活動を捉え、コンピュータが理解できる命令に変換することで協働ロボットの制御を実現します。 WIMI のブレイン コンピューター インターフェイス ベースのアセンブリおよびハンドガイド制御技術では、ブレイン コンピューター インターフェイス技術の応用により、定常状態視覚誘発電位 (SSVEP) 法を通じてさまざまなタスク モードの意図の切り替えが実現されます。
ブレイン・コンピュータ・インターフェース技術 (BCI) の応用: ブレイン・コンピュータ・インターフェース技術は技術パスの中核です。この技術では、オペレータの脳活動を捉え、コンピュータが理解できる命令に変換することで協働ロボットの制御を実現します。 WIMI のブレイン コンピューター インターフェイス ベースのアセンブリおよびハンドガイド制御技術では、ブレイン コンピューター インターフェイス技術の応用により、定常状態視覚誘発電位 (SSVEP) 法を通じてさまざまなタスク モードの意図の切り替えが実現されます。
コマンドの生成と配信: オペレーターの脳によって生成された電気信号を分析することにより、コンピューターは対応するコマンドを生成できます。これらのコマンドは、ミッション モードを切り替えるというオペレーターの意図を表します。ロボットの動作を制御するには、これらのコマンドを協働ロボットの制御システムに渡す必要があります。
手動誘導制御技術の応用: この技術分野の別の分野では、より正確な制御を実現するために手動誘導制御技術が使用されます。協働ロボットは 6 分力センサーを使用して実装されています。センサーはオペレーターの手の誘導力を感知し、この情報をロボット制御システムに送信できます
制御と実行: ブレイン・コンピュータ・インターフェース技術によって生成されたコマンドと手動誘導制御技術によって送信された情報は、最終的にロボットの制御システムによって実行されます。ロボットはオペレータの意図に応じて異なるタスクモードを切り替え、異なる段階で協調して動作します。
書き直された内容: フィードバックと同期: 技術表示パスの最後のステップには、フィードバックと同期が含まれます。ロボットが対応するアクションを実行すると、フィードバック情報がオペレーターに渡され、オペレーターがロボットの動作とステータスを確実に理解できるようになります。これにより、オペレーターは意図のコミュニケーションをさらに微調整することができ、人間と機械のより良いコラボレーションが可能になります。
WIMI ホログラフィック テクノロジのあらゆる側面では、人間とマシンの効率的かつ正確な共同操作を確保するために分業の定義と実装が必要です。この革新的な技術の開発の成功は、現代の製造業に新たな可能性をもたらし、生産効率を向上させ、オペレーターの負担を軽減し、中小企業で活躍するでしょうWIMI ホログラムの「ブレイン コンピューター インターフェイス ベースのアセンブリおよびハンドガイド制御技術」は、中小企業に前例のない機会をもたらしたことは明らかです。ブレイン コンピューター インターフェイス技術とハンドガイド制御技術を組み合わせることで、オペレーターは次のことが可能になります。手を使わずにロボットを正確に制御、誘導できるため、生産工程の効率化と品質の大幅な向上、オペレータの負担軽減、ミス率の低減など、現代の新時代を切り開きます。製造段階.
以上が生産および組立における人間と機械のコラボレーションの実現: WIMI ホログラフィック開発組立とブレイン コンピュータ インターフェイスに基づくハンドガイド制御技術の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 1672
1672
 14
1428
52
1332
25
1277
29
1257
24
14
1428
52
1332
25
1277
29
1257
24

 ブレイン・コンピュータ・インターフェースが現実に光る!工業情報化省は今後、その育成に注力していく予定だが、工業化への道はどこまで進んでいるのか。
Jun 02, 2023 pm 11:34 PM
ブレイン・コンピュータ・インターフェースが現実に光る!工業情報化省は今後、その育成に注力していく予定だが、工業化への道はどこまで進んでいるのか。
Jun 02, 2023 pm 11:34 PM
ブレイン・コンピュータ・インターフェースが現実に光る!工業情報化省は今後、その育成に注力していく予定だが、工業化への道はどこまで進んでいるのか。チャイナ・タイムズ(www.chinatimes.net.cn)の記者チー・メンと張志は、14年前に映画「アバター」が公開され、ファンタジーで魔法のような脳とコンピュータのインターフェースが全編を貫いたと深センから報告した。ブレイン コンピューター インターフェイスは、多くの SF 映画の重要な要素の一部になりました。今、ブレイン・コンピュータ・インターフェースが現実のものになりました。 5月29日、「ブレイン・コンピュータ・インターフェース革新開発フォーラム」で、工業情報化部の主任技術者である趙志国氏は、業界の共同努力により、我が国は完全な産業チェーンを形成したと紹介した。基本層、技術層、応用層をカバーするブレイン・コンピュータ・インターフェースであり、医療、教育、産業、エンターテイメントなどの分野で応用されています。同氏は、工業情報化省はブレイン・コンピューター・インターフェースを将来の開発ツールとして使用すると述べた。
 マスク、ブレイン・コンピューター・インターフェース、最初のツール
Jun 04, 2023 am 09:49 AM
マスク、ブレイン・コンピューター・インターフェース、最初のツール
Jun 04, 2023 am 09:49 AM
「シリコンバレーのアイアンマン」から「リアルなアイアンマン」へ、マスクは「人間トニー・スターク」となり、徐々に現実味を帯びてきている。ほんの数日前、マスク氏のブレイン・コンピューター・インターフェース会社ニューラリンクは大きな進展を発表した。同社は米国食品医薬品局(FDA)から承認を得て、初の人体臨床研究を開始する予定だ。つまり、同社のデバイスは体内に埋め込まれることになる。人間の脳。人間の視力を回復することと、筋肉を動かすことができない人々がスマートフォンなどのデバイスを制御できるようにすることの2つの用途に焦点を当てると報告されている。昨年11月、マスク氏は大胆な声明を発表し、ニューラリンクの最初の人体実験まではまだ約6か月あると述べた。しかしその後、高い安全上のリスク、動物の権利の侵害、危険な病原体の違法輸送の疑いにより...
 Samsung XR の特許取得済みの共有ブレイン コンピューター インターフェイスは、匂い、味などの完全な感覚フィードバック刺激を提供します。
Nov 27, 2023 pm 12:58 PM
Samsung XR の特許取得済みの共有ブレイン コンピューター インターフェイスは、匂い、味などの完全な感覚フィードバック刺激を提供します。
Nov 27, 2023 pm 12:58 PM
(Nweon 2023 年 11 月 27 日) 以前の情報によると、Samsung は完全なメタバース戦略を策定し、Samsung 中心の XR エコシステムの構築を目指しており、人材を積極的に採用しています。特許出願によると、同社は実際に究極のブレイン・コンピューター・インターフェースを検討しているという。以前は、ブレイン コンピューター インターフェイスの研究は、Meta、Valve、その他の新興企業の間でより一般的でした。もちろん、マイクロソフトのような企業もそれを検討しています。現在、XR 分野に積極的に展開している企業は、より高度なブレイン コンピューター インターフェイスを模索し始めています。 Samsung は、「情報生成方法および装置」というタイトルの特許出願の中で、ブレイン コンピューター インターフェイスを XR 感覚フィードバック刺激の分野に適用することを提案しました。
 投資界隈で人気!ブレイン・コンピュータ・インターフェースは勝てるトラックですか?
Jun 03, 2023 am 10:14 AM
投資界隈で人気!ブレイン・コンピュータ・インターフェースは勝てるトラックですか?
Jun 03, 2023 am 10:14 AM
『星空の下の焼きまんじゅう』『ほうれん草の星空写植』『星空の下のネギ』著者・編集者 「ブレイン・コンピュータ・インターフェース」というSF風味の用語が、最近投資家の間で最もよく使われるホットワードの一つになっています。このようなことができるセクターはありません。指数が 1 日で 8.2% 上昇することはあり得ます。簡単に言えば、ブレイン コンピューター インターフェイスは人間の脳と外部デバイスとの間に直接接続を確立し、人間の脳が機械と「対話」できるようにします。この経路は、中枢神経系の活動を測定および収集し、それを外界が認識できる信号に変換します。最近、中関村フォーラムの「ブレイン・コンピュータ・インターフェース革新開発フォーラム」で、同省の指導者も、我が国は基礎層、技術層、応用層をカバーするブレイン・コンピュータ・インターフェースの完全な産業チェーンを形成したと提案した。医療にも応用されており、
 ブレイン・コンピュータ・インターフェース産業連合は「ブレイン・コンピュータ・インターフェース+うつ病」に関する学術交流セミナーを成功裡に開催
Sep 20, 2023 pm 09:53 PM
ブレイン・コンピュータ・インターフェース産業連合は「ブレイン・コンピュータ・インターフェース+うつ病」に関する学術交流セミナーを成功裡に開催
Sep 20, 2023 pm 09:53 PM
技術開発の動向を徹底的に調査し、産業発展の方向性を探り、学際的な協力モデルを議論するために、ブレイン・コンピュータ・インターフェース産業同盟は2023年9月11日、「脳」をテーマとした「Bright Stars」の第2期を開催した。 「コンピュータインターフェース+うつ病」イベント学術交流セミナーを開催します。このセミナーは、需要と供給の結びつきと知識の共有を促進し、ブレイン・コンピューター・インターフェース産業の発展をさらに促進することを目的としています。このセミナーは、アライアンスシステムおよび産業アプリケーショングループの会長である周潔氏が主催しました。このセミナーは、ブレイン・コンピュータ・インターフェース産業同盟のメンバーから広く注目を集め、300名近い参加者があり、オンラインでのディスカッションの雰囲気も活発でした。瑞金病院神経調節センターは、「うつ病の神経調節への応用」と題して、「うつ病におけるブレイン・コンピューター・インターフェース」について講演し、脳におけるうつ病の治療について臨床例を通して詳細に紹介した。
 ブレイン・コンピュータ・インターフェースに関するビッグニュース、工業情報化省は産業応用を加速することを提案しました!最も有望なコンセプト株は2倍以上に上昇し、これらの株の取引活動は大幅に増加した。
Oct 12, 2023 pm 02:29 PM
ブレイン・コンピュータ・インターフェースに関するビッグニュース、工業情報化省は産業応用を加速することを提案しました!最も有望なコンセプト株は2倍以上に上昇し、これらの株の取引活動は大幅に増加した。
Oct 12, 2023 pm 02:29 PM
データは宝です。書き換えられた内容は次のとおりです。「データの宝は株式市場に投資するための重要なツールです。心配を減らすことができます。ブレイン・コンピューター・インターフェースは破壊的テクノロジーであり、医療、健康、教育、医療の分野で幅広い用途があります。」ゲームとエンターテイメント。産業情報技術省は画期的な提案をしました。ブレイン コンピューター インターフェイスの象徴的な技術製品のバッチ。10 月 11 日、ブレイン コンピューター インターフェイス産業同盟の公式 WeChat アカウントは、「」を実装するために次のように発表しました。 「2023年における将来の産業イノベーション課題の展開・先導業務の組織化及び実施に関する通知」(以下、「展開・先導業務」という。)に基づき、ブレインコンピュータの先導・展開業務の2023年解釈を強化する。今年の将来の産業イノベーション課題におけるインターフェースの方向性について、北京市経済情報局科学技術標準局と工業情報化部科学技術局ハイテク弁公室が方針をまとめた。 10月10日に広報・実装会議を開催し、ブレイン・コンピュータ・インターフェース企業が発表と先行研究を理解し、開発を掌握できるよう支援する
 猿なら14万!脳とコンピューターのインターフェースにはサルが必要ですが、実験動物を使うのは良いことなのでしょうか?
Jun 04, 2023 pm 01:16 PM
猿なら14万!脳とコンピューターのインターフェースにはサルが必要ですが、実験動物を使うのは良いことなのでしょうか?
Jun 04, 2023 pm 01:16 PM
『星空の煮込み』『ほうれん草の星空写植』『星空の下の人参』著者/編集者 最近、脳とコンピューターのインターフェースが流行っているが、ある日、オフィスで星空仲間たちが話し合っていたところ、話題が「猿」のことになった。 。マスクマ氏が2021年に設立したブレイン・コンピューター・インターフェース会社ニューラリンクは、「すべて思考を持って」卓球をしているように見えるサルを作成した。重要なのは、この魔法の猿の背後で実験を行うために何匹の猿が使われるかということです。 2022年、ブレイン・コンピューター・インターフェースを手掛けるマー氏の会社が告発され、その実験プロジェクトには合計23匹の実験用サルが関与し、そのうち15匹が死亡した。では、ブレイン・コンピューター・インターフェースが大規模に開発されれば、サルの価値は大幅に上がるのでしょうか?今日は実験に使われるサル、専門的には実験動物と呼ばれるものについてお話します。人間の医学
 マスク氏のブレイン・コンピューター・インターフェース会社ニューラリンクが人体実験を実施
Sep 20, 2023 pm 08:33 PM
マスク氏のブレイン・コンピューター・インターフェース会社ニューラリンクが人体実験を実施
Sep 20, 2023 pm 08:33 PM
マスク氏のブレイン・コンピュータ・インターフェースの新興企業ニューラリンクは火曜日、独立審査委員会から、麻痺患者の脳に脳インプラント装置を埋め込む初の人体臨床試験を実施する承認を得たと発表した。 Neuralink のワイヤレス完全埋め込み型ブレイン コンピュータ インターフェイスの有効性により、麻痺患者が脳で外部デバイスを制御できるようになります。同社は同時に、頸髄損傷や筋萎縮性側索硬化症(ALS)による麻痺のある患者を対象とした治験患者の募集を正式に開始した。工業情報化部は9月13日、2023年の将来の産業イノベーション課題を明らかにする作業を組織する通知を発表した。リストを公開するタスクはメタバースを対象としています。
