

Swift ドローンは AI テクノロジーを使用して FPV イベントで人間のトッププレイヤーを破りました

人工知能が、今度はドローンレースで人間の世界チャンピオンを再び破りました。
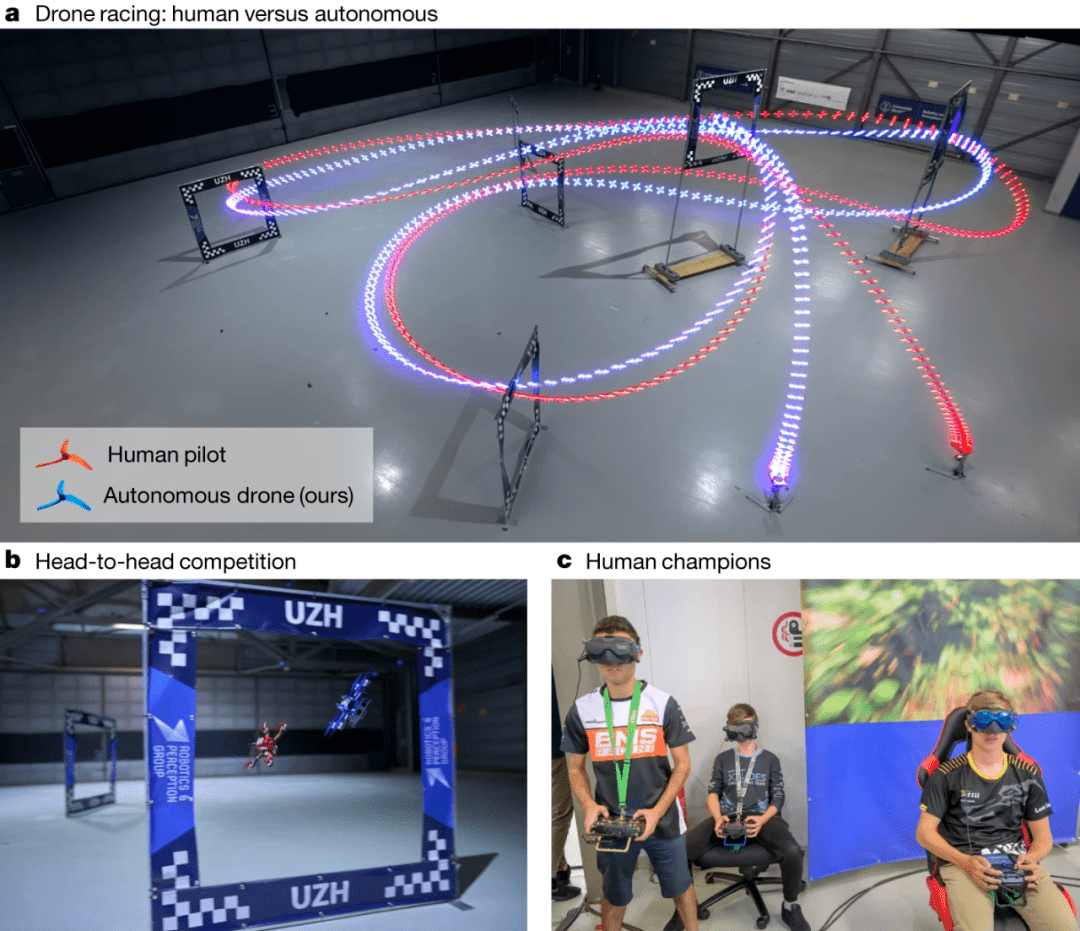
この主要な成果は、スイスのチューリッヒ大学のエンジニアのチームによって雑誌「Nature」と「Science Robotics」に掲載されました。 2011 年に AI ドローンと初めて対戦した後、スウィフトが登場するまで、自律型ドローンは人間のパイロットに勝つことはできませんでした。スウィフトは、2019年ドローンレーシングリーグ世界チャンピオンのアレックス・ヴァノーバー、2度のMultiGPインターナショナルオープンチャンピオンのトーマス・ビットマッタ、3度のスイスナショナルチャンピオンのマービン・シェイパーなど、世界チャンピオンの人間プレイヤーを破りました。
仮想領域では、人工知能がチェス、チェッカー、囲碁、スタークラフトなどのゲームで人間に勝利しました。そして今、初めて物理的な挑戦で人間を倒すことに成功しました
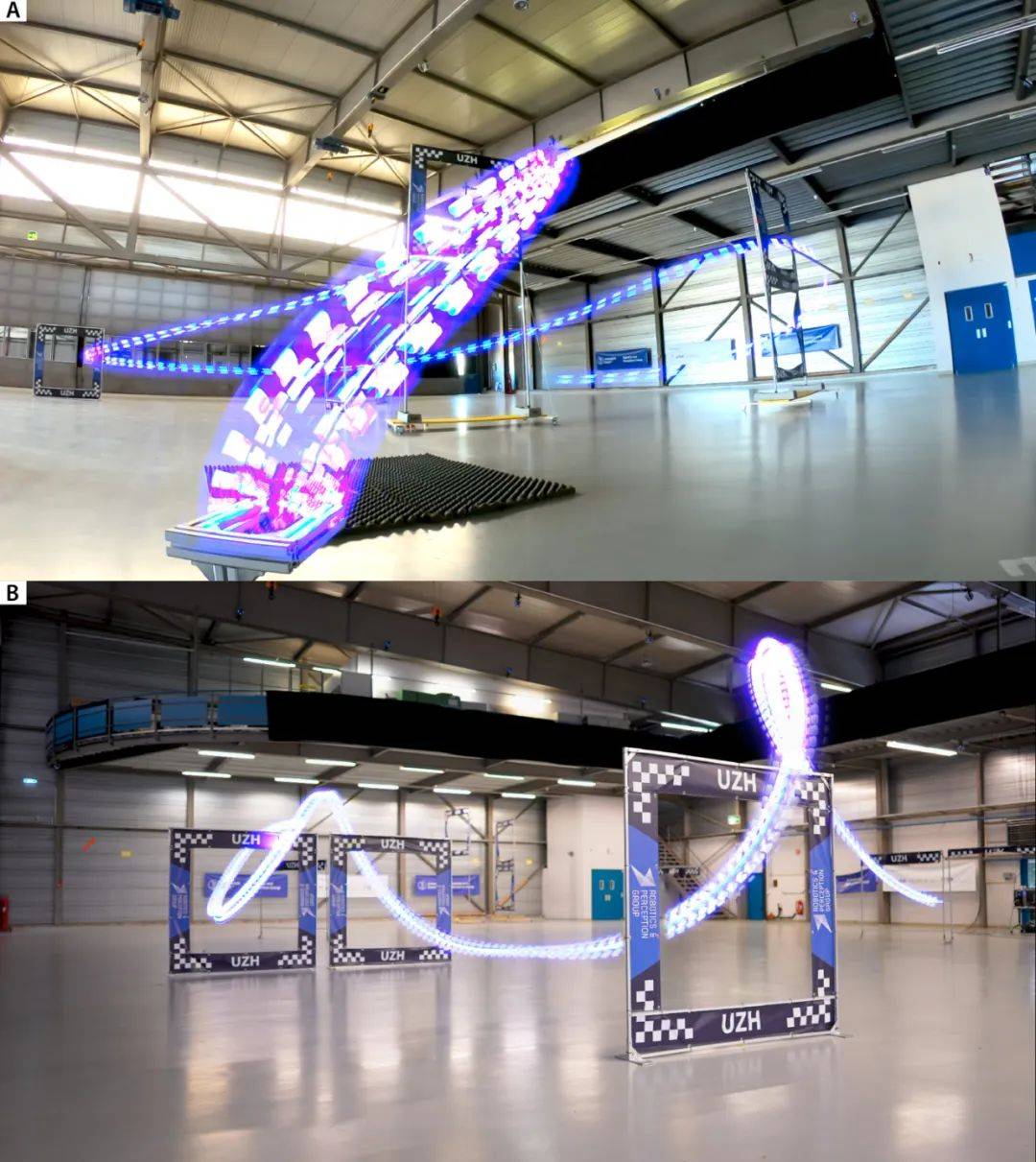
 「Swift」ドローンの成功の秘密は、ドローンのルートと速度を最適化できる強力な人工ニューラル ネットワークにあります。搭載カメラを通じて環境の詳細をリアルタイムで収集し、ドローンに正確な誘導を提供する一方、人間のパイロットはヘッドフォンに送信されるビデオ信号に依存して「一人称視点」を体験します。
「Swift」ドローンの成功の秘密は、ドローンのルートと速度を最適化できる強力な人工ニューラル ネットワークにあります。搭載カメラを通じて環境の詳細をリアルタイムで収集し、ドローンに正確な誘導を提供する一方、人間のパイロットはヘッドフォンに送信されるビデオ信号に依存して「一人称視点」を体験します。
このドローン レースでは、人間のオペレーターがオンボード カメラを介して 3D トラックでドローンを制御します。 Swift システムの革新的な点は、ドローンのステータスをコマンドにマッピングして、推力と回転速度を調整できることです。この成果は、モバイルロボット工学とマシンインテリジェンスの分野における画期的な成果です。

Swift は、搭載センサーとコンピューティングのみを使用して自律制御されるクアッドコプターです。航空機は 2 つの主要なモジュールで構成されています:
知覚システムは、高次元の視覚情報と慣性情報を低次元の表現に変換します;
- 制御戦略。知覚システムによって生成された低次元表現を取り込み、制御コマンドを生成します。
- そのうち、制御戦略はフィードフォワード ニューラル ネットワークによって表され、モデルフリーのオンポリシー深層強化学習 (RL) を使用してトレーニングされます。
研究結果は、これらの経験的ノイズ モデルが、制御戦略をシミュレーションから現実にうまく移す上で積極的な役割を果たすことを示しています
具体的には、Swift は航空機のセンサー読み取り値を制御コマンドに変換します。この変換プロセスには 2 つの部分が含まれます:
(1) 高次元の視覚情報と慣性情報をタスク固有の低次元エンコードに洗練するための観察戦略;
(2) 制御戦略、エンコーディングをドローン コマンドに変換します。
スウィフトが記録した 10 件の損失のうち、40% は対戦相手との衝突によるもの、40% は競技ゲートとの衝突によるもの、20% は人間が制御するドローンよりも遅いことが原因でした。全体として、スウィフトは人間が制御するドローンとのレースで最も多くの勝利を収め、また人間が制御するドローンのベストタイム(A. Vanover)を 6 秒上回り、最速のレース記録も樹立しました。
Swift は全体的に人間が制御するすべてのドローンよりも速かったものの、トラックのすべてのセグメントで速かったわけではありません。
研究チームによる慎重な分析により、スウィフトは離陸時の反応時間が短く、人間のパイロットよりも平均して 120 ミリ秒早く離陸し、またスウィフトはより速く加速し、より高い速度で最初の競技ゲートに入ることが判明しました。タイトなターンでは、スイフトの動きがよりタイトになります。
研究チームはまた、Swift は人間のオペレーターよりも長い時間スケールで軌道を最適化するという仮説を提案しました。モデルフリーの強化学習は、長期的な報酬を最適化することで実現できることが知られています。対照的に、人間のオペレーターは動きを計画するための時間スケールが短く、将来の競争ゲートはせいぜい 1 つしか予測できません。
以上がSwift ドローンは AI テクノロジーを使用して FPV イベントで人間のトッププレイヤーを破りましたの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7791
7791
 15
1644
14
1401
52
1298
25
1234
29
15
1644
14
1401
52
1298
25
1234
29

 2024年DJIドローンランキング:各モデル5万台以上の販売実績あり、あなたはどれを使ったことがありますか?
Dec 16, 2023 pm 05:33 PM
2024年DJIドローンランキング:各モデル5万台以上の販売実績あり、あなたはどれを使ったことがありますか?
Dec 16, 2023 pm 05:33 PM
やあやあ!私はユアン・ハハです、注目してください、もっとエキサイティングなコンテンツがあなたを待っています。ドローン技術の絶え間ない進歩により、私たちは今、最も重要で信頼性の高い4Kカメラの1つを数千元の予算内で購入できるようになりました。これは何台ですか数年前には想像もできなかった時代。 DJI、Autel、その他の企業の継続的な努力により、この夢が現実になりました。全体的に選ばれたドローンは DJI Mavic 3 Pro です。このドローンは、超高解像度の録画を提供するだけでなく、優れたフレーム レートと長時間の録画を提供します。長持ちするバッテリーの寿命。私の個人的な経験に加えて、ウェブ上の肯定的なレビューに基づいて選択できる他のトップドローンをいくつかまとめました。それでは、これらのエキサイティングなオプションを見てみましょう。
 ドローンの群れ: 防衛用途における革新的なテクノロジー
Nov 14, 2023 pm 08:53 PM
ドローンの群れ: 防衛用途における革新的なテクノロジー
Nov 14, 2023 pm 08:53 PM
要約: スウォーミングは、複数の領域 (陸、海、空、宇宙) で複数の無人システムを共同展開する、破壊的で革新的なテクノロジーです。新しいマイクロエレクトロニクス、誘導、ナビゲーション、センサー、人工知能技術の開発により、低コストのマイクロドローンが困難なミッションを実行できるようになりました。新しい意思決定プロセス、目標追跡、通信技術およびアルゴリズムと組み合わせると、群れは戦場に大きな影響を与える可能性があります。また、巡航ミサイルの迎撃などの重要な防衛能力だけでなく、継続的かつ検出不可能な監視能力を提供するためにも使用できます。この記事では、スウォーミングの分野におけるヨーロッパの研究活動について説明し、それが防衛に与える可能性のある重要な意味を掘り下げます。キーワード: UAV、自律機能、目標追跡、
 国産最大の無人輸送機が初飛行に成功 中国航空工程集団のAEP100-Aエンジン搭載
Aug 23, 2024 am 07:32 AM
国産最大の無人輸送機が初飛行に成功 中国航空工程集団のAEP100-Aエンジン搭載
Aug 23, 2024 am 07:32 AM
8月22日の当サイトのニュースによると、中国航空動力集団有限公司は本日6時28分、中国航空工業が完全に独自に開発した900キロワットのターボプロップエンジンAEP100-Aを正式発表した。社、陝西省で大型無人輸送機SA750Uの初飛行に成功。報道によると、AEP100-Aターボプロップエンジンは中国航空宇宙工学研究院によって設計され、韓国で製造されており、3次元の空力設計とユニット設計技術を使用して高温や平地に適応する能力を備えています。燃費を向上させながら、航空機の全体的な運用効率を向上させます。 AEP100ターボプロップエンジンシリーズは、2~6トンの汎用航空機や3~10トンの無人航空機に搭載可能であり、その総合性能は現在運用されているものと同レベルの国際先進レベルに達しています。このサイトが以前に報告した
 Apple、iOS 18に導入される準同型暗号化用のオープンソースSwiftパッケージをリリース
Jul 31, 2024 pm 01:10 PM
Apple、iOS 18に導入される準同型暗号化用のオープンソースSwiftパッケージをリリース
Jul 31, 2024 pm 01:10 PM
7月31日のニュースによると、Appleは昨日(7月30日)プレスリリースを発行し、Swiftプログラミング言語で準同型暗号化を可能にする新しいオープンソースSwiftパッケージ(swift-homomorphic-encryption)のリリースを発表した。注: 準同型暗号 (HE) とは、暗号文の準同型演算特性を満たす暗号アルゴリズムを指します。つまり、データを準同型暗号化した後、暗号文に対して特定の計算を実行し、得られた暗号文の計算結果を同時に処理します。状態復号後の平文は、平文データに対して同じ計算を直接実行することと同等であり、データの「不可視性」が実現されます。準同型暗号技術は、基になる暗号化されていないデータを運用プロセスに漏らすことなく、暗号化データを計算できます。
 プログラマーに適したAI起業家アイデア
Apr 09, 2024 am 09:01 AM
プログラマーに適したAI起業家アイデア
Apr 09, 2024 am 09:01 AM
皆さんこんにちは、カソンです。プログラマーの友人の多くは、独自の AI 製品の開発に参加したいと考えています。 「プロセスの自動化度」と「AIの適用度」に基づいて、製品形態を4つの象限に分けることができます。その中には、プロセス自動化の度合いは「製品のサービスプロセスのうち、どれだけ手動介入が必要か」を測定し、AI 適用の度合いは「製品における AI アプリケーションの割合」を測定します。まず、AI がサービスを処理する能力を制限します。 AI 画像アプリケーション、およびユーザーはアプリケーションを介してそれを渡します。完全なサービス プロセスは UI と対話することで完了できるため、高度な自動化が実現します。一方で、「AI画像処理」はAIの能力に大きく依存するため、AIの活用度は高い。第 2 象限は、知識管理アプリケーション、時間管理アプリケーション、高度なプロセス自動化などの従来のアプリケーション開発分野です。
 我が国初の積載量3トンを超える大型無人輸送機「SA750U」が国産システムと資材で初飛行に成功
Aug 23, 2024 am 07:31 AM
我が国初の積載量3トンを超える大型無人輸送機「SA750U」が国産システムと資材で初飛行に成功
Aug 23, 2024 am 07:31 AM
8月22日の当サイトのニュースによると、「山和華宇」の公式公式アカウントによると、本日6時28分、サンワード華宇航空技術が独自に開発し、サンワードスターの戦略調整により完成した大型無人輸送機SA750Uが完成した。航空会社は西安市京辺から飛行し、実験用ドローン試験センターが初飛行に成功した。 ▲写真出典「山河華宇」公式公式アカウント、以下同 報道によると、40分間の飛行試験中、機体のすべてのシステム機器は正常に動作し、機体の姿勢は安定していたという。性能は設計仕様を満たし、予定された飛行課題を完了した後、飛行機は順調に帰還し、最初の飛行は完全に成功した。 SA750Uは、荷重3トンを超える我が国初の大型無人輸送機であり、山和華宇会社はコンセプト設計から初号機の初飛行成功までの全過程をわずか2年8か月で完了した。
 国産の Wing Loong シリーズ ドローン: 気象学、緊急事態、セキュリティなどの多くの分野をカバーする、多分野のアプリケーションに新たな章を書き込む
Dec 01, 2023 pm 05:47 PM
国産の Wing Loong シリーズ ドローン: 気象学、緊急事態、セキュリティなどの多くの分野をカバーする、多分野のアプリケーションに新たな章を書き込む
Dec 01, 2023 pm 05:47 PM
科技日報によると、11月28日、四川省自貢市のAVIC UAV拠点で、中国航空工業総公司は「大国の翼ある龍が世界を旅する」をテーマとした一般公開イベントを開催した。国産大型ドローンを展示 ハイエンドドローン開発や産業建設における開発実績。 10年以上の開発期間を経て、AVIC UAVが独自に開発した国産UAV製品「翼竜」シリーズは血統を形成しました。ウィングロン2号は国有企業の一般公開日に登場し、飛行デモンストレーションを行った。ウィングロン 2 は、航空業界によって開発された中高高度、長期耐久性の多目的 UAV システムであり、終日、全天候、全領域、および複数のシナリオのミッション実行能力を備えています。この無人航空機システムは我が国初の国産大型ターボプロップ動力無人航空機システムであり、高度な空力レイアウト、機体構造、
 Wing Loong UAV が再び空へ飛び、甘粛省の空中基地局となる
Dec 21, 2023 am 08:13 AM
Wing Loong UAV が再び空へ飛び、甘粛省の空中基地局となる
Dec 21, 2023 am 08:13 AM
ウイングロン2H無人機は再び甘粛省獅子山県へ向かい、災害偵察や緊急通信支援などの災害救援任務を遂行した。このタイプのドローンは「航空基地局」と呼ばれ、チャイナモバイル、チャイナユニコム、テレコムの公衆ネットワーク信号ネットワークを継続的に復旧し、50平方キロメートルの公衆ネットワーク通信を指向性復旧し、15,000をカバーする音声およびビデオ通信ネットワークを確立することができます。平方キロメートル。ウィングロン2Hは、2021年に河南省鄭州での大雨災害救助と2022年に四川省魯定地震救助で好成績を収め、任務を無事に完了した。出典: CCTV Military Weibo
