

米国商標特許庁が開示した技術特許文書によると、ファーウェイは最近、携帯電話の顕微鏡技術の特許を取得することに成功しました。この技術的進歩により、携帯電話のレンズと被写体との距離がわずか約0.5 mmの場合に、携帯電話のレンズは最大20~400倍の倍率を達成できるようになります。このブレークスルーにより、携帯電話の顕微鏡技術のより広範で革新的な応用分野が開かれました
ファーウェイは2021年に顕微鏡特許技術を申請したとされていますが、その時期は世界的な感染症が猛威を振るっていた時期でした。ファーウェイは特許文書の中で、この技術の多用途性を強調した。通常の撮影に加え、細菌などの微生物の種類や数を直接識別し、衛生アドバイスなどを提供する技術です。この技術の基本原理は、携帯電話に通常のカメラとマクロカメラの2つの異なるカメラを搭載することです。マクロカメラは光学分解能 2.Math.m

の平面色消しマイクロ対物レンズを使用しています。通常のカメラで撮影することで、物体のシーンを識別できます。そしてカテゴリー。次に、マクロ カメラで顕微鏡ショットを撮り、以前に撮影した写真内のオブジェクトを顕微鏡モードでズームインします。次に、携帯電話は通常のカメラとマクロカメラからの情報を組み合わせて、オブジェクトの状態を正確に判断します。最後に、音声やテキストなどを通じて対象物の衛生状態を説明し、適切な衛生上の提案を提供します
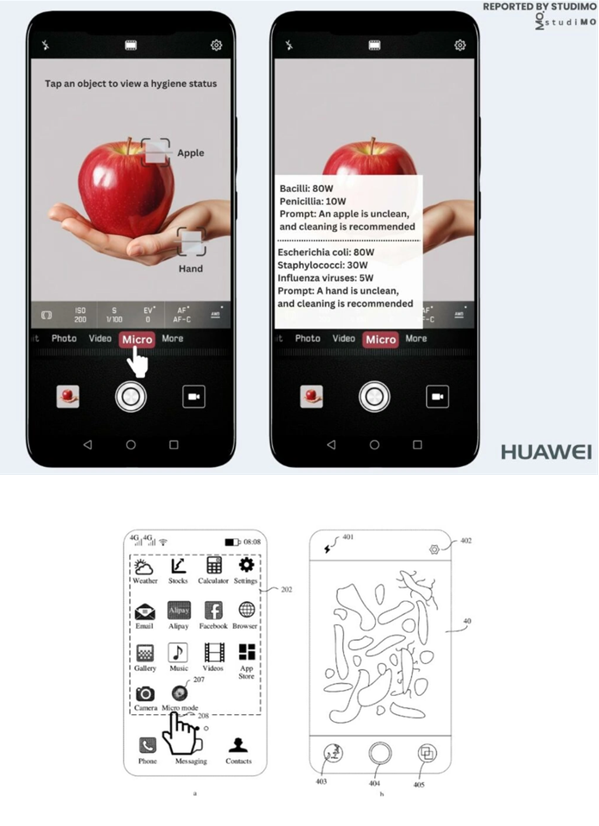
さらに、ファーウェイは、次のような一連の可能性についても言及しました。応用シナリオには、食品の安全性、調理器具のメンテナンス、個人の衛生評価、テーブルの清潔さ、子供のおもちゃの検査、ペットの衛生状態の監視などが含まれており、この革新的な技術の公開出願は広く期待を集めています。デジタルブロガーらは、ファーウェイの顕微鏡技術は徐々に成熟しており、将来のP70やP80などの携帯電話にはこの機能が搭載されると予想していると述べた。彼らは、この特許取得済みの顕微鏡技術が、実際には画像技術の興味深い分野であると信じています。ファーウェイの継続的なイノベーションは、スマートフォンの開発にさらなる可能性をもたらし、ユーザーにより実用的な機能体験を提供します。
以上がファーウェイのイノベーション特許:携帯電話の顕微鏡技術が健康検査の新たなトレンドをリードの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
















![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



