

機械学習 | PyTorch の簡潔なチュートリアル パート 2

前回の記事 「PyTorch 簡潔なチュートリアル パート 1」 に引き続き、多層パーセプトロン、畳み込みニューラル ネットワーク、LSTMNet について学習していきます。
1. 多層パーセプトロン
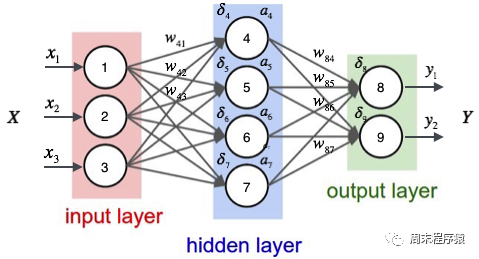
多層パーセプトロンは単純なニューラル ネットワークであり、深層学習の重要な基盤です。ネットワークに 1 つ以上の隠れ層を追加することで、線形モデルの制限を克服します。具体的な図は次のとおりです:
import numpy as npimport torchfrom torch.autograd import Variablefrom torch import optimfrom data_util import load_mnistdef build_model(input_dim, output_dim):return torch.nn.Sequential(torch.nn.Linear(input_dim, 512, bias=False),torch.nn.ReLU(),torch.nn.Dropout(0.2),torch.nn.Linear(512, 512, bias=False),torch.nn.ReLU(),torch.nn.Dropout(0.2),torch.nn.Linear(512, output_dim, bias=False),)def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)n_examples, n_features = trX.size()n_classes = 10model = build_model(n_features, n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.Adam(model.parameters())batch_size = 100for i in range(100):cost = 0.num_batches = n_examples // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[start:end], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%"% (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main()(1) 上記のコードは単層ニューラル ネットワークのコードに似ていますが、異なる点は build_model が層を構築することです。 3 つの線形層と 2 つの ReLU 活性化関数のニューラル ネットワーク モデルを含む:
- 最初の線形層をモデルに追加します。この層の入力特徴の数は input_dim で、出力特徴の数は512;
- 次に、ReLU 活性化関数を追加し、ドロップアウト層を使用してモデルの非線形機能を強化し、過学習を防止します。
- 2 番目の線形層をモデルに追加します。この層の入力特徴量は 512 で、出力特徴量の数は 512 です。
- 次に、ReLU 活性化関数とドロップアウト層を追加します。
- 3 番目の線形層をモデルに追加します。この層の入力特徴量の数は 512 であり、出力特徴量の数は out_dim 、つまりモデルの出力カテゴリの数です;
(2) ReLU 活性化関数とは何ですか? ReLU (Rectified Linear Unit) 活性化関数は、深層学習とニューラル ネットワークで一般的に使用される活性化関数です。ReLU 関数の数式は次のとおりです: f(x) = max(0, x) (x は入力値)。 ReLU関数の特徴は、入力値が0以下の場合は出力が0になり、入力値が0より大きい場合は出力が入力値と同じになることです。簡単に言えば、ReLU 関数は負の部分を 0 に抑制し、正の部分を変更しないままにします。ニューラル ネットワークにおける ReLU 活性化関数の役割は、ニューラル ネットワークが複雑な非線形関係に適合できるように非線形要素を導入することであり、同時に、ReLU 関数は他の活性化関数 (たとえば、 Sigmoid または Tanh として)、その他の利点;
(3) Dropout 層とは何ですか?ドロップアウト層は、過学習を防ぐためにニューラル ネットワークで使用される技術です。トレーニング プロセス中に、ドロップアウト層は一部のニューロンの出力をランダムに 0 に設定します。つまり、これらのニューロンを「破棄」します。この目的は、ニューロン間の相互依存性を軽減し、それによってネットワークの汎化能力を向上させることです。
(4)print("エポック %d, コスト = %f, acc = %.2f%%" % (i 1, コスト / バッチ数, 100. * np.mean(predY == teY ) )) 最後に、現在のトレーニング ラウンド、損失値、および acc を出力します。上記のコード出力は次のとおりです:
...Epoch 91, cost = 0.011129, acc = 98.45%Epoch 92, cost = 0.007644, acc = 98.58%Epoch 93, cost = 0.011872, acc = 98.61%Epoch 94, cost = 0.010658, acc = 98.58%Epoch 95, cost = 0.007274, acc = 98.54%Epoch 96, cost = 0.008183, acc = 98.43%Epoch 97, cost = 0.009999, acc = 98.33%Epoch 98, cost = 0.011613, acc = 98.36%Epoch 99, cost = 0.007391, acc = 98.51%Epoch 100, cost = 0.011122, acc = 98.59%
最終的に同じデータ分類の方が、単一のデータ分類よりも精度が高いことがわかります。層ニューラル ネットワーク (98.59% > 97.68%)。
2. 畳み込みニューラル ネットワーク
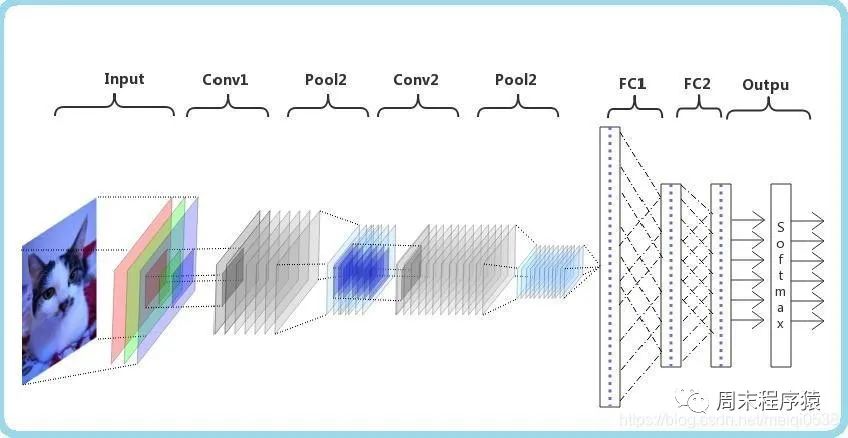
畳み込みニューラル ネットワーク (CNN) は、深層学習アルゴリズムです。 CNNは行列を入力すると、重要な部分とそうでない部分を区別(重み付け)することができます。他の分類タスクと比較して、CNN は高度なデータ前処理を必要とせず、十分にトレーニングされていれば行列の特性を学習できます。次の図は、プロセスを示しています。
import numpy as npimport torchfrom torch.autograd import Variablefrom torch import optimfrom data_util import load_mnistclass ConvNet(torch.nn.Module):def __init__(self, output_dim):super(ConvNet, self).__init__()self.conv = torch.nn.Sequential()self.conv.add_module("conv_1", torch.nn.Conv2d(1, 10, kernel_size=5))self.conv.add_module("maxpool_1", torch.nn.MaxPool2d(kernel_size=2))self.conv.add_module("relu_1", torch.nn.ReLU())self.conv.add_module("conv_2", torch.nn.Conv2d(10, 20, kernel_size=5))self.conv.add_module("dropout_2", torch.nn.Dropout())self.conv.add_module("maxpool_2", torch.nn.MaxPool2d(kernel_size=2))self.conv.add_module("relu_2", torch.nn.ReLU())self.fc = torch.nn.Sequential()self.fc.add_module("fc1", torch.nn.Linear(320, 50))self.fc.add_module("relu_3", torch.nn.ReLU())self.fc.add_module("dropout_3", torch.nn.Dropout())self.fc.add_module("fc2", torch.nn.Linear(50, output_dim))def forward(self, x):x = self.conv.forward(x)x = x.view(-1, 320)return self.fc.forward(x)def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)trX = trX.reshape(-1, 1, 28, 28)teX = teX.reshape(-1, 1, 28, 28)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)n_examples = len(trX)n_classes = 10model = ConvNet(output_dim=n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9)batch_size = 100for i in range(100):cost = 0.num_batches = n_examples // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[start:end], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%"% (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main() (1) 上記のコードは、torch.nn.Module クラスを継承し、ボリューム Convolutional を表す ConvNet という名前のクラスを定義します。ニューラル ネットワークは、__init__ メソッドで 2 つのサブモジュール conv と fc を定義し、それぞれ畳み込み層と全結合層を表します。 conv サブモジュールでは、2 つの畳み込み層 (torch.nn.Conv2d)、2 つの最大プーリング層 (torch.nn.MaxPool2d)、2 つの ReLU 活性化関数 (torch.nn.ReLU)、およびドロップアウト層 (torch.nn.ドロップアウト)。 fc サブモジュールでは、2 つの線形層 (torch.nn.Linear)、ReLU 活性化関数、ドロップアウト層が定義されています;
プーリング層は CNN で重要な役割を果たします。目的は次のとおりです:
- 降低维度:池化层通过对输入特征图(Feature maps)进行局部区域的下采样操作,降低了特征图的尺寸。这样可以减少后续层中的参数数量,降低计算复杂度,加速训练过程;
- 平移不变性:池化层可以提高网络对输入图像的平移不变性。当图像中的某个特征发生小幅度平移时,池化层的输出仍然具有相似的特征表示。这有助于提高模型的泛化能力,使其能够在不同位置和尺度下识别相同的特征;
- 防止过拟合:通过减少特征图的尺寸,池化层可以降低模型的参数数量,从而降低过拟合的风险;
- 增强特征表达:池化操作可以聚合局部区域内的特征,从而强化和突出更重要的特征信息。常见的池化操作有最大池化(Max Pooling)和平均池化(Average Pooling),分别表示在局部区域内取最大值或平均值作为输出;
(3)print("Epoch %d, cost = %f, acc = %.2f%%" % (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))最后打印当前训练的轮次,损失值和acc,上述的代码输出如下:
...Epoch 91, cost = 0.047302, acc = 99.22%Epoch 92, cost = 0.049026, acc = 99.22%Epoch 93, cost = 0.048953, acc = 99.13%Epoch 94, cost = 0.045235, acc = 99.12%Epoch 95, cost = 0.045136, acc = 99.14%Epoch 96, cost = 0.048240, acc = 99.02%Epoch 97, cost = 0.049063, acc = 99.21%Epoch 98, cost = 0.045373, acc = 99.23%Epoch 99, cost = 0.046127, acc = 99.12%Epoch 100, cost = 0.046864, acc = 99.10%
可以看出最后相同的数据分类,准确率比多层感知机要高(99.10% > 98.59%)。
3、LSTMNet
LSTMNet是使用长短时记忆网络(Long Short-Term Memory, LSTM)构建的神经网络,核心思想是引入了一个名为"记忆单元"的结构,该结构可以在一定程度上保留长期依赖信息,LSTM中的每个单元包括一个输入门(input gate)、一个遗忘门(forget gate)和一个输出门(output gate),这些门的作用是控制信息在记忆单元中的流动,以便网络可以学习何时存储、更新或输出有用的信息。
import numpy as npimport torchfrom torch import optim, nnfrom data_util import load_mnistclass LSTMNet(torch.nn.Module):def __init__(self, input_dim, hidden_dim, output_dim):super(LSTMNet, self).__init__()self.hidden_dim = hidden_dimself.lstm = nn.LSTM(input_dim, hidden_dim)self.linear = nn.Linear(hidden_dim, output_dim, bias=False)def forward(self, x):batch_size = x.size()[1]h0 = torch.zeros([1, batch_size, self.hidden_dim])c0 = torch.zeros([1, batch_size, self.hidden_dim])fx, _ = self.lstm.forward(x, (h0, c0))return self.linear.forward(fx[-1])def train(model, loss, optimizer, x_val, y_val):model.train()optimizer.zero_grad()fx = model.forward(x_val)output = loss.forward(fx, y_val)output.backward()optimizer.step()return output.item()def predict(model, x_val):model.eval()output = model.forward(x_val)return output.data.numpy().argmax(axis=1)def main():torch.manual_seed(42)trX, teX, trY, teY = load_mnist(notallow=False)train_size = len(trY)n_classes = 10seq_length = 28input_dim = 28hidden_dim = 128batch_size = 100epochs = 100trX = trX.reshape(-1, seq_length, input_dim)teX = teX.reshape(-1, seq_length, input_dim)trX = np.swapaxes(trX, 0, 1)teX = np.swapaxes(teX, 0, 1)trX = torch.from_numpy(trX).float()teX = torch.from_numpy(teX).float()trY = torch.tensor(trY)model = LSTMNet(input_dim, hidden_dim, n_classes)loss = torch.nn.CrossEntropyLoss(reductinotallow='mean')optimizer = optim.SGD(model.parameters(), lr=0.01, momentum=0.9)for i in range(epochs):cost = 0.num_batches = train_size // batch_sizefor k in range(num_batches):start, end = k * batch_size, (k + 1) * batch_sizecost += train(model, loss, optimizer,trX[:, start:end, :], trY[start:end])predY = predict(model, teX)print("Epoch %d, cost = %f, acc = %.2f%%" %(i + 1, cost / num_batches, 100. * np.mean(predY == teY)))if __name__ == "__main__":main()(1)以上这段代码通用的部分就不解释了,具体说LSTMNet类:
- self.lstm = nn.LSTM(input_dim, hidden_dim)创建一个LSTM层,输入维度为input_dim,隐藏层维度为hidden_dim;
- self.linear = nn.Linear(hidden_dim, output_dim, bias=False)创建一个线性层(全连接层),输入维度为hidden_dim,输出维度为output_dim,并设置不使用偏置项(bias);
- h0 = torch.zeros([1, batch_size, self.hidden_dim])初始化LSTM层的隐藏状态h0,全零张量,形状为[1, batch_size, hidden_dim];
- c0 = torch.zeros([1, batch_size, self.hidden_dim])初始化LSTM层的细胞状态c0,全零张量,形状为[1, batch_size, hidden_dim];
- fx, _ = self.lstm.forward(x, (h0, c0))将输入数据x以及初始隐藏状态h0和细胞状态c0传入LSTM层,得到LSTM层的输出fx;
- return self.linear.forward(fx[-1])将LSTM层的输出传入线性层进行计算,得到最终输出。这里fx[-1]表示取LSTM层输出的最后一个时间步的数据;
(2)print("第%d轮,损失值=%f,准确率=%.2f%%" % (i + 1, cost / num_batches, 100. * np.mean(predY == teY)))。打印出当前训练轮次的信息,其中包括损失值和准确率,以上代码的输出结果如下:
Epoch 91, cost = 0.000468, acc = 98.57%Epoch 92, cost = 0.000452, acc = 98.57%Epoch 93, cost = 0.000437, acc = 98.58%Epoch 94, cost = 0.000422, acc = 98.57%Epoch 95, cost = 0.000409, acc = 98.58%Epoch 96, cost = 0.000396, acc = 98.58%Epoch 97, cost = 0.000384, acc = 98.57%Epoch 98, cost = 0.000372, acc = 98.56%Epoch 99, cost = 0.000360, acc = 98.55%Epoch 100, cost = 0.000349, acc = 98.55%
4、辅助代码
两篇文章的from data_util import load_mnist的data_util.py代码如下:
import gzip
import os
import urllib.request as request
from os import path
import numpy as np
DATASET_DIR = 'datasets/'
MNIST_FILES = ["train-images-idx3-ubyte.gz", "train-labels-idx1-ubyte.gz", "t10k-images-idx3-ubyte.gz", "t10k-labels-idx1-ubyte.gz"]
def download_file(url, local_path):
dir_path = path.dirname(local_path)
if not path.exists(dir_path):
print("创建目录'%s' ..." % dir_path)
os.makedirs(dir_path)
print("从'%s'下载中 ..." % url)
request.urlretrieve(url, local_path)
def download_mnist(local_path):
url_root = "http://yann.lecun.com/exdb/mnist/"
for f_name in MNIST_FILES:
f_path = os.path.join(local_path, f_name)
if not path.exists(f_path):
download_file(url_root + f_name, f_path)
def one_hot(x, n):
if type(x) == list:
x = np.array(x)
x = x.flatten()
o_h = np.zeros((len(x), n))
o_h[np.arange(len(x)), x] = 1
return o_h
def load_mnist(ntrain=60000, ntest=10000, notallow=True):
data_dir = os.path.join(DATASET_DIR, 'mnist/')
if not path.exists(data_dir):
download_mnist(data_dir)
else:
# 检查所有文件
checks = [path.exists(os.path.join(data_dir, f)) for f in MNIST_FILES]
if not np.all(checks):
download_mnist(data_dir)
with gzip.open(os.path.join(data_dir, 'train-images-idx3-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
trX = loaded[16:].reshape((60000, 28 * 28)).astype(float)
with gzip.open(os.path.join(data_dir, 'train-labels-idx1-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
trY = loaded[8:].reshape((60000))
with gzip.open(os.path.join(data_dir, 't10k-images-idx3-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
teX = loaded[16:].reshape((10000, 28 * 28)).astype(float)
with gzip.open(os.path.join(data_dir, 't10k-labels-idx1-ubyte.gz')) as fd:
buf = fd.read()
loaded = np.frombuffer(buf, dtype=np.uint8)
teY = loaded[8:].reshape((10000))
trX /= 255.
teX /= 255.
trX = trX[:ntrain]
trY = trY[:ntrain]
teX = teX[:ntest]
teY = teY[:ntest]
if onehot:
trY = one_hot(trY, 10)
teY = one_hot(teY, 10)
else:
trY = np.asarray(trY)
teY = np.asarray(teY)
return trX, teX, trY, teY以上が機械学習 | PyTorch の簡潔なチュートリアル パート 2の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7476
7476
 15
1377
52
77
11
19
32
15
1377
52
77
11
19
32

 オープンソースの無料画像注釈ツールおすすめ 15 選
Mar 28, 2024 pm 01:21 PM
オープンソースの無料画像注釈ツールおすすめ 15 選
Mar 28, 2024 pm 01:21 PM
画像の注釈は、ラベルまたは説明情報を画像に関連付けて、画像の内容に深い意味と説明を与えるプロセスです。このプロセスは機械学習にとって重要であり、画像内の個々の要素をより正確に識別するために視覚モデルをトレーニングするのに役立ちます。画像に注釈を追加することで、コンピュータは画像の背後にあるセマンティクスとコンテキストを理解できるため、画像の内容を理解して分析する能力が向上します。画像アノテーションは、コンピュータ ビジョン、自然言語処理、グラフ ビジョン モデルなどの多くの分野をカバーする幅広い用途があり、車両が道路上の障害物を識別するのを支援したり、障害物の検出を支援したりするなど、幅広い用途があります。医用画像認識による病気の診断。この記事では主に、より優れたオープンソースおよび無料の画像注釈ツールをいくつか推奨します。 1.マケセンス
 この記事では、SHAP: 機械学習のモデルの説明について説明します。
Jun 01, 2024 am 10:58 AM
この記事では、SHAP: 機械学習のモデルの説明について説明します。
Jun 01, 2024 am 10:58 AM
機械学習とデータ サイエンスの分野では、モデルの解釈可能性が常に研究者や実務家に焦点を当ててきました。深層学習やアンサンブル手法などの複雑なモデルが広く適用されるようになったことで、モデルの意思決定プロセスを理解することが特に重要になってきました。 Explainable AI|XAI は、モデルの透明性を高めることで、機械学習モデルに対する信頼と自信を構築するのに役立ちます。モデルの透明性の向上は、複数の複雑なモデルの普及や、モデルを説明するための意思決定プロセスなどの方法によって実現できます。これらの方法には、特徴重要度分析、モデル予測間隔推定、ローカル解釈可能性アルゴリズムなどが含まれます。特徴重要度分析では、入力特徴に対するモデルの影響度を評価することで、モデルの意思決定プロセスを説明できます。モデルの予測間隔の推定
 透明!主要な機械学習モデルの原理を徹底的に分析!
Apr 12, 2024 pm 05:55 PM
透明!主要な機械学習モデルの原理を徹底的に分析!
Apr 12, 2024 pm 05:55 PM
平たく言えば、機械学習モデルは、入力データを予測された出力にマッピングする数学関数です。より具体的には、機械学習モデルは、予測出力と真のラベルの間の誤差を最小限に抑えるために、トレーニング データから学習することによってモデル パラメーターを調整する数学関数です。機械学習には、ロジスティック回帰モデル、デシジョン ツリー モデル、サポート ベクター マシン モデルなど、多くのモデルがあります。各モデルには、適用可能なデータ タイプと問題タイプがあります。同時に、異なるモデル間には多くの共通点があったり、モデル進化の隠れた道が存在したりすることがあります。コネクショニストのパーセプトロンを例にとると、パーセプトロンの隠れ層の数を増やすことで、それをディープ ニューラル ネットワークに変換できます。パーセプトロンにカーネル関数を追加すると、SVM に変換できます。これです
 学習曲線を通じて過学習と過小学習を特定する
Apr 29, 2024 pm 06:50 PM
学習曲線を通じて過学習と過小学習を特定する
Apr 29, 2024 pm 06:50 PM
この記事では、学習曲線を通じて機械学習モデルの過学習と過小学習を効果的に特定する方法を紹介します。過小適合と過適合 1. 過適合 モデルがデータからノイズを学習するためにデータ上で過学習されている場合、そのモデルは過適合していると言われます。過学習モデルはすべての例を完璧に学習するため、未確認の新しい例を誤って分類してしまいます。過適合モデルの場合、完璧/ほぼ完璧なトレーニング セット スコアとひどい検証セット/テスト スコアが得られます。若干修正: 「過学習の原因: 複雑なモデルを使用して単純な問題を解決し、データからノイズを抽出します。トレーニング セットとしての小さなデータ セットはすべてのデータを正しく表現できない可能性があるため、2. 過学習の Heru。」
 宇宙探査と人類居住工学における人工知能の進化
Apr 29, 2024 pm 03:25 PM
宇宙探査と人類居住工学における人工知能の進化
Apr 29, 2024 pm 03:25 PM
1950 年代に人工知能 (AI) が誕生しました。そのとき、研究者たちは、機械が思考などの人間と同じようなタスクを実行できることを発見しました。その後、1960 年代に米国国防総省は人工知能に資金を提供し、さらなる開発のために研究所を設立しました。研究者たちは、宇宙探査や極限環境での生存など、多くの分野で人工知能の応用を見出しています。宇宙探査は、地球を超えた宇宙全体を対象とする宇宙の研究です。宇宙は地球とは条件が異なるため、極限環境に分類されます。宇宙で生き残るためには、多くの要素を考慮し、予防策を講じる必要があります。科学者や研究者は、宇宙を探索し、あらゆるものの現状を理解することが、宇宙の仕組みを理解し、潜在的な環境危機に備えるのに役立つと信じています。
 C++ での機械学習アルゴリズムの実装: 一般的な課題と解決策
Jun 03, 2024 pm 01:25 PM
C++ での機械学習アルゴリズムの実装: 一般的な課題と解決策
Jun 03, 2024 pm 01:25 PM
C++ の機械学習アルゴリズムが直面する一般的な課題には、メモリ管理、マルチスレッド、パフォーマンスの最適化、保守性などがあります。解決策には、スマート ポインター、最新のスレッド ライブラリ、SIMD 命令、サードパーティ ライブラリの使用、コーディング スタイル ガイドラインの遵守、自動化ツールの使用が含まれます。実践的な事例では、Eigen ライブラリを使用して線形回帰アルゴリズムを実装し、メモリを効果的に管理し、高性能の行列演算を使用する方法を示します。
 説明可能な AI: 複雑な AI/ML モデルの説明
Jun 03, 2024 pm 10:08 PM
説明可能な AI: 複雑な AI/ML モデルの説明
Jun 03, 2024 pm 10:08 PM
翻訳者 | Li Rui によるレビュー | 今日、人工知能 (AI) および機械学習 (ML) モデルはますます複雑になっており、これらのモデルによって生成される出力はブラックボックスになっており、関係者に説明することができません。 Explainable AI (XAI) は、利害関係者がこれらのモデルがどのように機能するかを理解できるようにし、これらのモデルが実際に意思決定を行う方法を確実に理解できるようにし、AI システムの透明性、信頼性、およびこの問題を解決するための説明責任を確保することで、この問題を解決することを目指しています。この記事では、さまざまな説明可能な人工知能 (XAI) 手法を検討して、その基礎となる原理を説明します。説明可能な AI が重要であるいくつかの理由 信頼と透明性: AI システムが広く受け入れられ、信頼されるためには、ユーザーは意思決定がどのように行われるかを理解する必要があります
 あなたが知らない機械学習の 5 つの流派
Jun 05, 2024 pm 08:51 PM
あなたが知らない機械学習の 5 つの流派
Jun 05, 2024 pm 08:51 PM
機械学習は人工知能の重要な分野であり、明示的にプログラムしなくてもコンピューターにデータから学習して能力を向上させる機能を提供します。機械学習は、画像認識や自然言語処理から、レコメンデーションシステムや不正行為検出に至るまで、さまざまな分野で幅広く応用されており、私たちの生活様式を変えつつあります。機械学習の分野にはさまざまな手法や理論があり、その中で最も影響力のある 5 つの手法は「機械学習の 5 つの流派」と呼ばれています。 5 つの主要な学派は、象徴学派、コネクショニスト学派、進化学派、ベイジアン学派、およびアナロジー学派です。 1. 象徴主義は、象徴主義とも呼ばれ、論理的推論と知識の表現のためのシンボルの使用を強調します。この学派は、学習は既存の既存の要素を介した逆演繹のプロセスであると信じています。
