
 テクノロジー周辺機器
AI
カリフォルニア大学バークレー校 Google が LLM を革新し、端末普及モデルを実装し、それを IGN に使用して 1 ステップでリアルな画像を生成、アメリカの TV シリーズがインスピレーションの源となる
テクノロジー周辺機器
AI
カリフォルニア大学バークレー校 Google が LLM を革新し、端末普及モデルを実装し、それを IGN に使用して 1 ステップでリアルな画像を生成、アメリカの TV シリーズがインスピレーションの源となる
カリフォルニア大学バークレー校 Google が LLM を革新し、端末普及モデルを実装し、それを IGN に使用して 1 ステップでリアルな画像を生成、アメリカの TV シリーズがインスピレーションの源となる

半空で流行った普及型は淘汰される?
現在、GAN、拡散モデル、整合性モデルなどの生成型 AI モデルは、対象となるデータ分布に応じて入力と出力をマッピングすることで画像を生成します。 :
通常、この種のモデルは多くの実際の画像を学習する必要があり、生成された画像の実際の特徴を確認しようとします。
最近、カリフォルニア大学バークレー校と Google の研究者は、新世代モデルであるインポテント生成ネットワーク (IGN) を提案しました。書き換える必要がある内容は次のとおりです:
 写真
写真
紙のアドレス: https://arxiv.org/abs/2311.01462
IGN は次のことができます。ランダム ノイズ、単純なグラフィックスなどのさまざまな入力から選択すると、複数ステップの反復を必要とせず、単一ステップでリアルな画像が生成されます。 #このモデルの目標は、「グローバル プロジェクター」は、任意の入力データをターゲット データ分布にマッピングできることです。書き換える必要がある内容は次のとおりです:
つまり、普遍的な画像生成モデルは将来必ず使用されます。書き直す必要があるのは次のとおりです:
興味深いことに、「サインフェルド」の非常に効果的なシーンが実際に作者のインスピレーションの源となっています。書き直す必要があるのは次のとおりです。
Picture
 このシーンは、「冪等演算子」の概念をよく要約しています。操作中、同じ入力を繰り返し操作すると結果は常に同じになります、書き換える必要がある内容は
このシーンは、「冪等演算子」の概念をよく要約しています。操作中、同じ入力を繰り返し操作すると結果は常に同じになります、書き換える必要がある内容は
## つまり ## です。
#写真
書き直す必要がある内容は次のとおりです: ジェリー・サインフェルドがユーモアを交えて指摘したように、いくつかの現実の行動再書き込みが必要な冪等のコンテンツは次のとおりです:
ジェリー・サインフェルドがユーモアを交えて指摘したように、いくつかの現実の行動再書き込みが必要な冪等のコンテンツは次のとおりです:
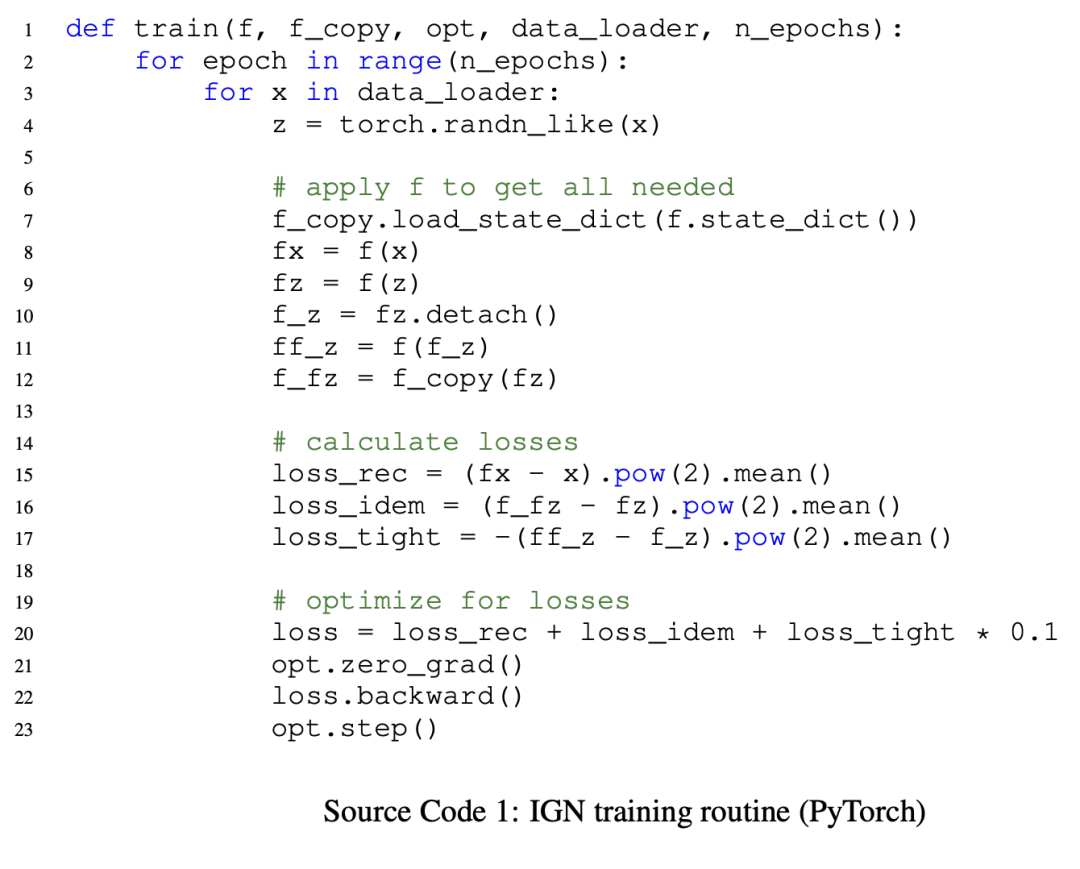
IGN には GAN および拡散モデルとの 2 つの重要な違いがあります:
#- GAN とは異なり、IGN は個別の生成器と識別器を必要とせず、「自己対決」モデルであり、生成と識別を同時に完了するために書き換える必要がある内容は次のとおりです。- 増分ステップを実行する拡散モデルとは異なり、IGN は 1 つのステップで入力をデータ分布にマッピングしようとします。書き換える必要があるのは次のとおりです:
IGN (冪等生成モデル) の起源は何ですか?
ソース分布からのものになるようにトレーニングされます。
入力サンプルのターゲット分布が与えられると、生成されるサンプルを書き直す必要がある 内容は次のとおりです:
サンプル データ セットを考慮すると、各例は次から取得されます 内容は次のとおりです: その後、研究者はトレーニングを受けました。モデル  を
を  にマッピングします。書き換える必要がある内容は次のとおりです:
にマッピングします。書き換える必要がある内容は次のとおりです:
ディストリビューション  と
と  が同じ空間にある、つまり、それらのインスタンスのディメンションが同じであると仮定します。 : これにより、
が同じ空間にある、つまり、それらのインスタンスのディメンションが同じであると仮定します。 : これにより、  2 種類のインスタンス
2 種類のインスタンス  と
と  に適用されます。書き換える必要がある内容は次のとおりです:
に適用されます。書き換える必要がある内容は次のとおりです:
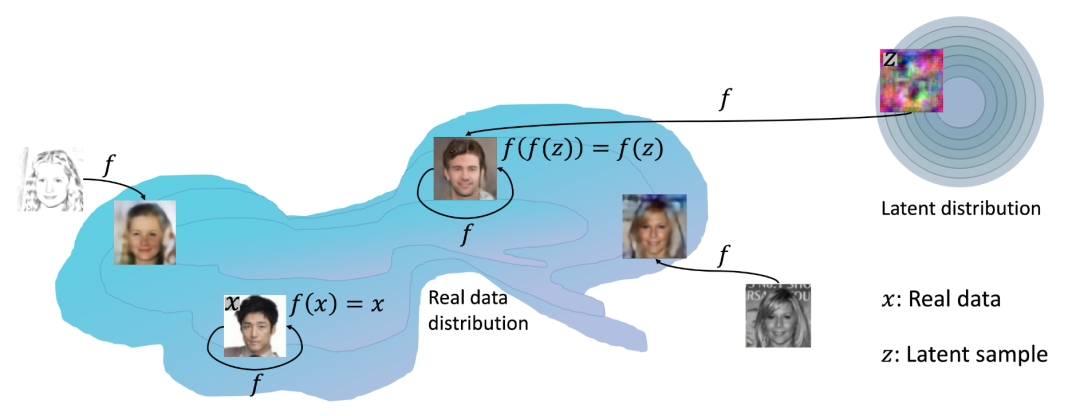
図は、IGN の背後にある基本的な考え方を示しています。実際の例 (x) はモデル f 書き換える必要がある内容は次のとおりです。他の入力 (z) ) は f にマッピングされます。
書き換える必要がある内容は次のとおりです。他の入力 (z) ) は f にマッピングされます。  を最適化することにより、それ自体にマッピングされたインスタンス ストリーム上で書き換える必要があるコンテンツは次のとおりです:
を最適化することにより、それ自体にマッピングされたインスタンス ストリーム上で書き換える必要があるコンテンツは次のとおりです:
 Picture
Picture
IGN トレーニング ルーチンの書き換えが必要な PyTorch コード例は次のとおりです:
 写真##実験結果
写真##実験結果
#作者は、現段階では IGN で生成された結果が最先端のモデルと競合できないことを認めています。書き直す必要がある内容は次のとおりです:
At 実験では、より小さなモデルと低解像度のデータセットが使用され、探索の主な焦点は簡略化された手法にありました。書き直す必要がある内容は次のとおりです:
もちろん、GAN や拡散モデルなどの基本世代のモデリング技術も、成熟した大規模なパフォーマンスを実現するまでに長い時間がかかりました。
#実験設定
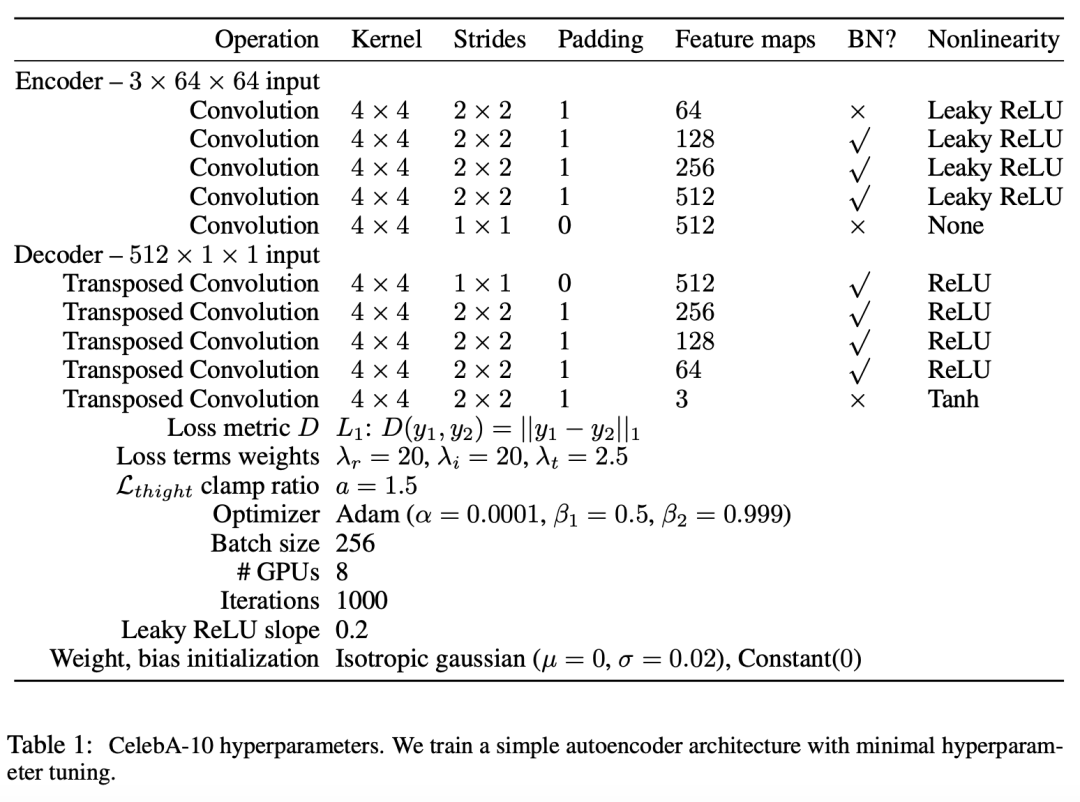
研究者らは、28×28 および 64 の画像解像度を使用して、MNIST (グレースケールの手書き数字データセット) と CelebA (顔画像データセット) で IGN を評価しました。
著者は単純なオートエンコーダ アーキテクチャを使用しており、エンコーダは DCGAN の単純な 5 層識別器バックボーンであり、デコーダはジェネレータです。書き換える必要がある内容は次のとおりです。トレーニングおよびネットワークのハイパーパラメータを表 1 に示します。書き換える必要がある内容は次のとおりです。
Picture
 結果の生成
結果の生成
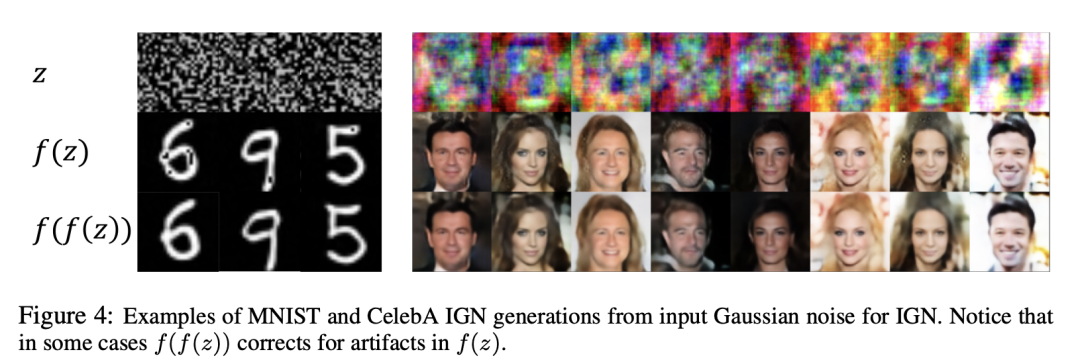
図 4 は、モデルを 1 回と 2 回連続して適用した後の 2 つのデータ セットの定性的な結果を示しています。
示されているように、IGN を 1 回適用すると (f (z))、コヒーレントな生成結果が生成されます。書き換える必要があるのは次のとおりです: ただし、穴などのアーティファクトが発生する可能性があります。 MNIST の数字、または顔画像の頭頂部。髪と頭髪の歪んだピクセルは書き換える必要があります。
f (f (f (z))) を再度適用すると、これらの問題を修正し、穴を埋めるか、フェイシャル ノイズ パッチを軽減します。書き直す必要がある部分の全体的な変更は次のとおりです。
#図
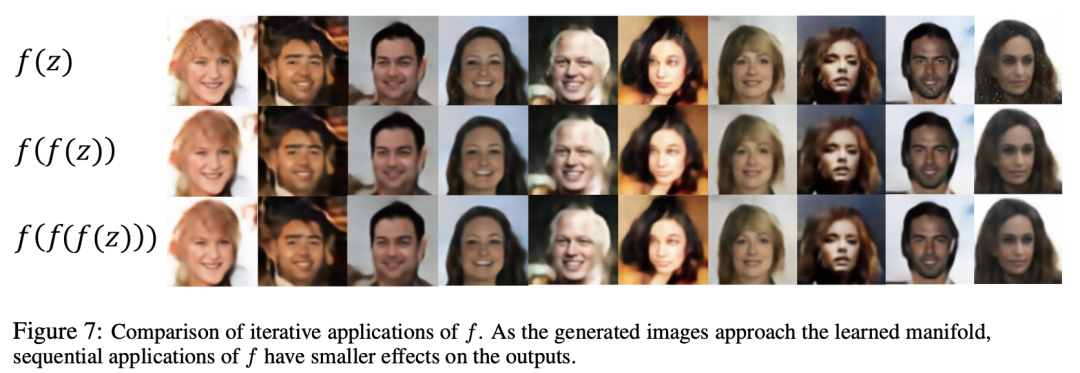
 # # 図 7 は、f を 3 回適用した追加の結果を示しています。その結果、書き換える必要がある内容は次のとおりです。
# # 図 7 は、f を 3 回適用した追加の結果を示しています。その結果、書き換える必要がある内容は次のとおりです。
 Picture
Picture
 ## と
## と 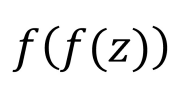 を比較すると、画像が学習された多様体 の場合、 f を再度適用すると、画像が分散されていると見なされるため、最小限の変更が行われます。書き換える必要があるのは次のとおりです:
を比較すると、画像が学習された多様体 の場合、 f を再度適用すると、画像が分散されていると見なされるため、最小限の変更が行われます。書き換える必要があるのは次のとおりです:
潜在空間操作
著者は、GAN で示されたものと同様に、IGN が一貫した潜在空間を持つことを操作を実行することによって証明しました。図 6 は、潜在空間アルゴリズムを次のように書き直す必要があることを示しています。
写真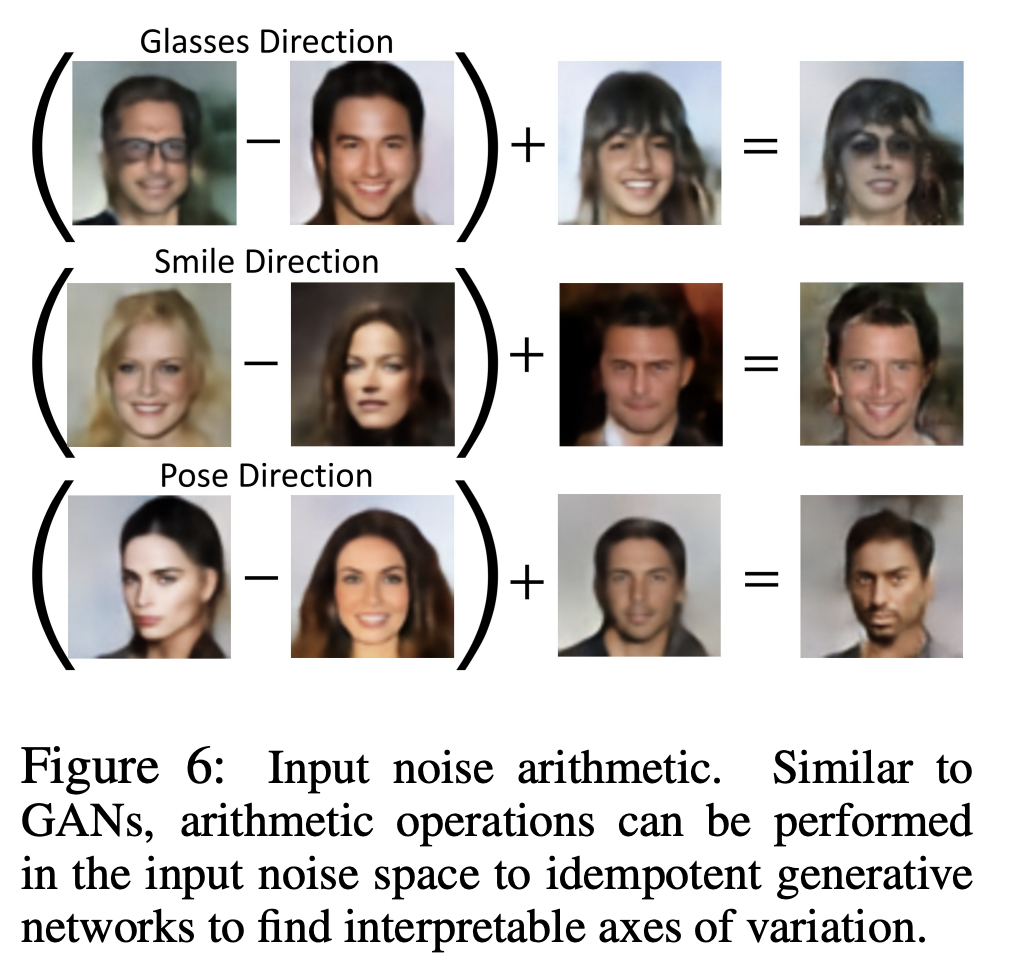 分布外マッピング
分布外マッピング
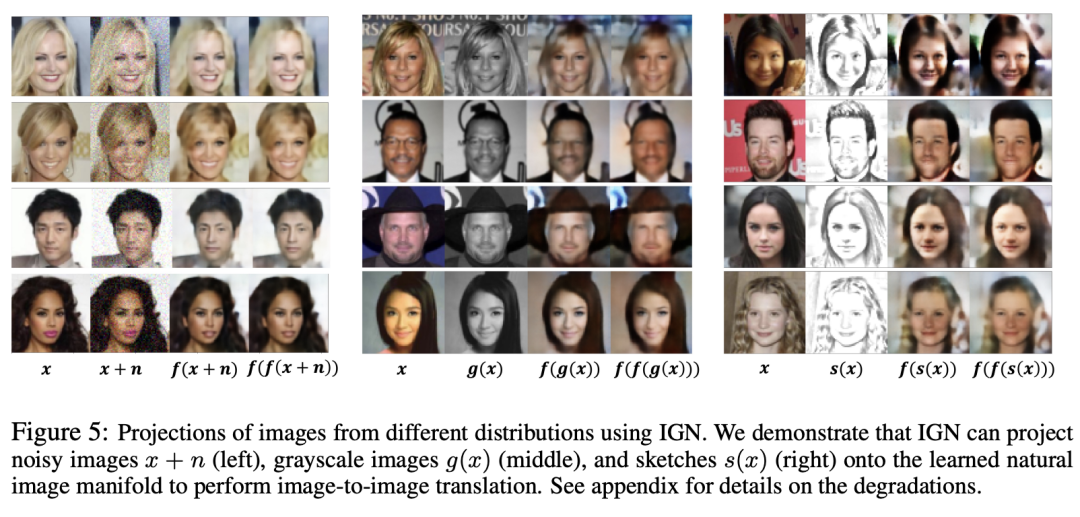
作者も検証しましたさまざまなディストリビューションからのデータを変換することで、画像がモデルに入力され、同等の「自然画像」が生成され、IGN の「グローバル マッピング」の可能性が検証されます。書き換える必要がある内容は次のとおりです:
#研究者らは、これを証明するために、ノイズのある画像 x n 個のノイズ除去を行い、グレースケール画像を色付けし、
、スケッチを図 5 の実際の画像に変換しました。書き換える必要がある点は次のとおりです:  元の画像 x、これらの逆タスクは適切に設定されていません。書き直す必要があるのは次のとおりです: IGN は元の画像に準拠した自然なマッピングを作成できます
元の画像 x、これらの逆タスクは適切に設定されていません。書き直す必要があるのは次のとおりです: IGN は元の画像に準拠した自然なマッピングを作成できます 示されているように、f を継続的に適用すると画質が向上します (たとえば、投影されたスケッチの暗いアーティファクトや煙のアーティファクトが除去されます)。
示されているように、f を継続的に適用すると画質が向上します (たとえば、投影されたスケッチの暗いアーティファクトや煙のアーティファクトが除去されます)。
写真
次は Google ですか?
 上記の結果から、IGN は推論においてより効果的であり、トレーニング後の 1 ステップで結果を生成できることがわかります。書き換える必要がある内容は次のとおりです:
上記の結果から、IGN は推論においてより効果的であり、トレーニング後の 1 ステップで結果を生成できることがわかります。書き換える必要がある内容は次のとおりです:
より一貫性のある結果を出力することもでき、医療画像修復などのより多くのアプリケーションに拡張できる可能性があります。書き換える必要がある内容は次のとおりです:
私たちは、この研究を、任意の入力をターゲット分布にマッピングすることを学習するモデル、つまり生成モデリングの新しいパラダイムに向けた最初のステップと見なしています。
次に、研究チームは、より多くのデータを使用して IGN の規模を拡大し、新しい生成 AI モデルの可能性を最大限に活用することを計画しています。書き換えが必要な内容:最新の研究コードは今後 GitHub で公開されます。書き換えが必要な内容は:
参考文献:
##https://www.php.cn/link/2bd388f731f26312bfc0fe30da009595
https://www .php.cn/link/e1e4e65fddf79af60aab04457a6565a6
以上がカリフォルニア大学バークレー校 Google が LLM を革新し、端末普及モデルを実装し、それを IGN に使用して 1 ステップでリアルな画像を生成、アメリカの TV シリーズがインスピレーションの源となるの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7488
7488
 15
1377
52
77
11
19
40
15
1377
52
77
11
19
40

 世界で最も強力なオープンソース MoE モデルが登場。GPT-4 に匹敵する中国語機能を備え、価格は GPT-4-Turbo のわずか 1% 近くです
May 07, 2024 pm 04:13 PM
世界で最も強力なオープンソース MoE モデルが登場。GPT-4 に匹敵する中国語機能を備え、価格は GPT-4-Turbo のわずか 1% 近くです
May 07, 2024 pm 04:13 PM
従来のコンピューティングを超える能力を備えているだけでなく、より低コストでより効率的なパフォーマンスを実現する人工知能モデルを想像してみてください。これは SF ではありません。世界で最も強力なオープンソース MoE モデルである DeepSeek-V2[1] が登場しました。 DeepSeek-V2 は、経済的なトレーニングと効率的な推論の特徴を備えた強力な専門家混合 (MoE) 言語モデルです。これは 236B のパラメータで構成されており、そのうち 21B は各マーカーをアクティブにするために使用されます。 DeepSeek67B と比較して、DeepSeek-V2 はパフォーマンスが優れていると同時に、トレーニング コストを 42.5% 節約し、KV キャッシュを 93.3% 削減し、最大生成スループットを 5.76 倍に高めます。 DeepSeek は一般的な人工知能を研究する会社です
 AI が数学研究を破壊する!フィールズ賞受賞者で中国系アメリカ人の数学者が上位 11 件の論文を主導 | テレンス・タオが「いいね!」しました
Apr 09, 2024 am 11:52 AM
AI が数学研究を破壊する!フィールズ賞受賞者で中国系アメリカ人の数学者が上位 11 件の論文を主導 | テレンス・タオが「いいね!」しました
Apr 09, 2024 am 11:52 AM
AI は確かに数学を変えつつあります。最近、この問題に細心の注意を払っている陶哲軒氏が『米国数学協会会報』(米国数学協会会報)の最新号を送ってくれた。 「機械は数学を変えるのか?」というテーマを中心に、多くの数学者が意見を述べ、そのプロセス全体は火花に満ち、ハードコアで刺激的でした。著者には、フィールズ賞受賞者のアクシャイ・ベンカテシュ氏、中国の数学者鄭楽軍氏、ニューヨーク大学のコンピューター科学者アーネスト・デイビス氏、その他業界で著名な学者を含む強力な顔ぶれが揃っている。 AI の世界は劇的に変化しています。これらの記事の多くは 1 年前に投稿されたものです。
 こんにちは、電気アトラスです!ボストン・ダイナミクスのロボットが復活、180度の奇妙な動きにマスク氏も恐怖
Apr 18, 2024 pm 07:58 PM
こんにちは、電気アトラスです!ボストン・ダイナミクスのロボットが復活、180度の奇妙な動きにマスク氏も恐怖
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas は正式に電動ロボットの時代に突入します!昨日、油圧式アトラスが歴史の舞台から「涙ながらに」撤退したばかりですが、今日、ボストン・ダイナミクスは電動式アトラスが稼働することを発表しました。ボストン・ダイナミクス社は商用人型ロボットの分野でテスラ社と競争する決意を持っているようだ。新しいビデオが公開されてから、わずか 10 時間ですでに 100 万人以上が視聴しました。古い人が去り、新しい役割が現れるのは歴史的な必然です。今年が人型ロボットの爆発的な年であることは間違いありません。ネットユーザーは「ロボットの進歩により、今年の開会式は人間のように見え、人間よりもはるかに自由度が高い。しかし、これは本当にホラー映画ではないのか?」とコメントした。ビデオの冒頭では、アトラスは仰向けに見えるように地面に静かに横たわっています。次に続くのは驚くべきことです
 MLP に代わる KAN は、オープンソース プロジェクトによって畳み込みまで拡張されました
Jun 01, 2024 pm 10:03 PM
MLP に代わる KAN は、オープンソース プロジェクトによって畳み込みまで拡張されました
Jun 01, 2024 pm 10:03 PM
今月初め、MIT やその他の機関の研究者らは、MLP に代わる非常に有望な代替案である KAN を提案しました。 KAN は、精度と解釈可能性の点で MLP よりも優れています。また、非常に少数のパラメーターを使用して、多数のパラメーターを使用して実行する MLP よりも優れたパフォーマンスを発揮できます。たとえば、著者らは、KAN を使用して、より小規模なネットワークと高度な自動化で DeepMind の結果を再現したと述べています。具体的には、DeepMind の MLP には約 300,000 個のパラメーターがありますが、KAN には約 200 個のパラメーターしかありません。 KAN は、MLP が普遍近似定理に基づいているのに対し、KAN はコルモゴロフ-アーノルド表現定理に基づいているのと同様に、強力な数学的基礎を持っています。以下の図に示すように、KAN は
 Google は大喜び: JAX のパフォーマンスが Pytorch や TensorFlow を上回りました! GPU 推論トレーニングの最速の選択肢となる可能性があります
Apr 01, 2024 pm 07:46 PM
Google は大喜び: JAX のパフォーマンスが Pytorch や TensorFlow を上回りました! GPU 推論トレーニングの最速の選択肢となる可能性があります
Apr 01, 2024 pm 07:46 PM
Google が推進する JAX のパフォーマンスは、最近のベンチマーク テストで Pytorch や TensorFlow のパフォーマンスを上回り、7 つの指標で 1 位にランクされました。また、テストは最高の JAX パフォーマンスを備えた TPU では行われませんでした。ただし、開発者の間では、依然として Tensorflow よりも Pytorch の方が人気があります。しかし、将来的には、おそらくより大規模なモデルが JAX プラットフォームに基づいてトレーニングされ、実行されるようになるでしょう。モデル 最近、Keras チームは、ネイティブ PyTorch 実装を使用して 3 つのバックエンド (TensorFlow、JAX、PyTorch) をベンチマークし、TensorFlow を使用して Keras2 をベンチマークしました。まず、主流のセットを選択します
 時系列予測 NLP 大規模モデルの新機能: 時系列予測の暗黙的なプロンプトを自動的に生成
Mar 18, 2024 am 09:20 AM
時系列予測 NLP 大規模モデルの新機能: 時系列予測の暗黙的なプロンプトを自動的に生成
Mar 18, 2024 am 09:20 AM
今日は、時系列予測のパフォーマンスを向上させるために、時系列データを潜在空間上の大規模な自然言語処理 (NLP) モデルと整合させる方法を提案するコネチカット大学の最近の研究成果を紹介したいと思います。この方法の鍵は、潜在的な空間ヒント (プロンプト) を使用して時系列予測の精度を高めることです。論文タイトル: S2IP-LLM: SemanticSpaceInformedPromptLearningwithLLMforTimeSeriesForecasting ダウンロードアドレス: https://arxiv.org/pdf/2403.05798v1.pdf 1. 大きな問題の背景モデル
 テスラのロボットは工場で働く、マスク氏:手の自由度は今年22に達する!
May 06, 2024 pm 04:13 PM
テスラのロボットは工場で働く、マスク氏:手の自由度は今年22に達する!
May 06, 2024 pm 04:13 PM
テスラのロボット「オプティマス」の最新映像が公開され、すでに工場内で稼働可能となっている。通常の速度では、バッテリー(テスラの4680バッテリー)を次のように分類します:公式は、20倍の速度でどのように見えるかも公開しました - 小さな「ワークステーション」上で、ピッキング、ピッキング、ピッキング:今回は、それがリリースされたハイライトの1つビデオの内容は、オプティマスが工場内でこの作業を完全に自律的に行い、プロセス全体を通じて人間の介入なしに完了するというものです。そして、オプティマスの観点から見ると、自動エラー修正に重点を置いて、曲がったバッテリーを拾い上げたり配置したりすることもできます。オプティマスのハンドについては、NVIDIA の科学者ジム ファン氏が高く評価しました。オプティマスのハンドは、世界の 5 本指ロボットの 1 つです。最も器用。その手は触覚だけではありません
 FisheyeDetNet: 魚眼カメラに基づいた最初のターゲット検出アルゴリズム
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: 魚眼カメラに基づいた最初のターゲット検出アルゴリズム
Apr 26, 2024 am 11:37 AM
目標検出は自動運転システムにおいて比較的成熟した問題であり、その中でも歩行者検出は最も初期に導入されたアルゴリズムの 1 つです。ほとんどの論文では非常に包括的な研究が行われています。ただし、サラウンドビューに魚眼カメラを使用した距離認識については、あまり研究されていません。放射状の歪みが大きいため、標準のバウンディング ボックス表現を魚眼カメラに実装するのは困難です。上記の説明を軽減するために、拡張バウンディング ボックス、楕円、および一般的な多角形の設計を極/角度表現に探索し、これらの表現を分析するためのインスタンス セグメンテーション mIOU メトリックを定義します。提案された多角形モデルの FisheyeDetNet は、他のモデルよりも優れたパフォーマンスを示し、同時に自動運転用の Valeo 魚眼カメラ データセットで 49.5% の mAP を達成しました。
