

ドローンの群れ: 防衛用途における革新的なテクノロジー

要約:スウォーミングは、複数のドメイン (陸、海、空、宇宙) で複数の無人システムを調整して展開する、破壊的で革新的なテクノロジーです。新しいマイクロエレクトロニクス、誘導、ナビゲーション、センサー、人工知能技術の開発により、低コストのマイクロドローンが困難なミッションを実行できるようになりました。新しい意思決定プロセス、目標追跡、通信技術およびアルゴリズムと組み合わせると、群れは戦場に大きな影響を与える可能性があります。また、巡航ミサイルの迎撃などの重要な防衛能力だけでなく、継続的かつ検出不可能な監視能力を提供するためにも使用できます。この記事では、スウォーミングの分野におけるヨーロッパの研究活動について説明し、それが防衛に与える可能性のある重要な意味を掘り下げます。
キーワード: UAV、自律機能、ターゲット追跡、誘導と制御、センサーフュージョン

ドローン群はさまざまな無人機器で構成されており、意思決定、目標追跡、誘導と制御、センサー融合とコマンドの機能を備えており、インテリジェントな自律「システム」のグループとして動作できます。群システムの各機能は、独立したインテリジェントな自律システムとして独立して動作することもできます。 無人デバイス、人工知能 (AI)、通信、誘導と制御、センサー フュージョン、航空宇宙、および無人交通管理 (UTM) の開発を活用して、必要なインテリジェンスと自律性を備えた無人車両を設計します。これらのドローンは協調して飛行できます。蜂の群れや鳥の群れのように。このようなドローンの群れは、デジタル技術とスマート技術を組み合わせた防衛企業に革新的な機能をもたらす可能性がある。ドローンの群れは、ヨーロッパの安全保障能力の強化にも役立ち、都市交通、無人交通管理、自動運転、無人機器などの他の分野に破壊的な影響を与える可能性があります。 国防の観点から見ると、ドローンの使用により、戦闘員が危険な環境にさらされるリスクを大幅に軽減できます。ドローンは、広い地域(地中海、ヨーロッパの国境など)の継続的な監視など、退屈で骨の折れる作業を実行できます。将来の軍事シナリオでは、ドローンを使用して敵を混乱させ、圧倒することもできます。図 1 は、軍事キャンプや施設などの高価値資産の保護と監視のためのマルチドメイン無人機群コンセプトを示しています。この概念は、最初に提案された欧州防衛庁のパイロット プロジェクト「欧州群」(EUROSWARM) に基づいて 2016 年に開発されました。
図 1: マルチドメインのドローン群の概念 2.ミツバチコロニー技術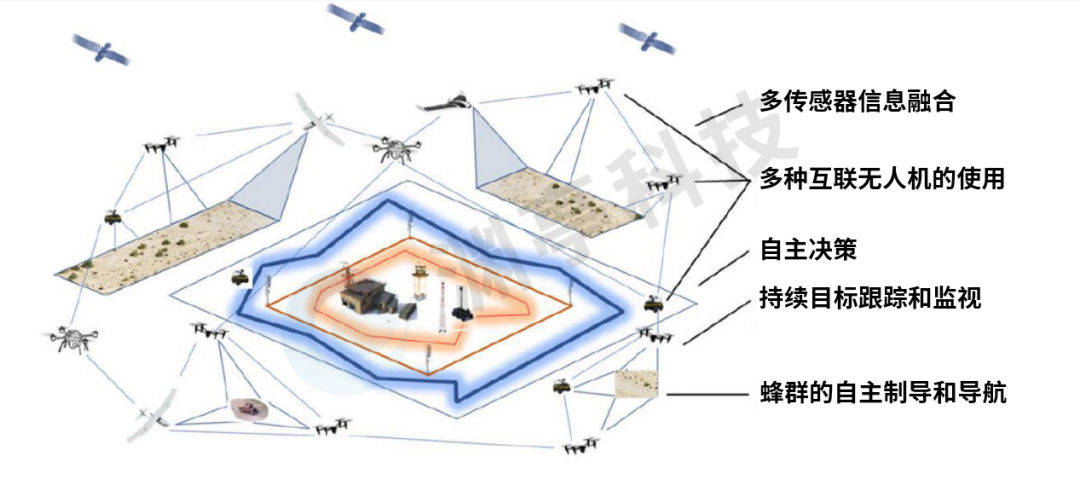 ドローン群は自律型または半自律型ドローンのグループで構成され、群れ内のドローンは共通の目標を達成するために互いに協力できます。ドローンの群れは、偵察、監視、攻撃作戦などのさまざまな軍事任務に使用できます。ドローン群の設計に関しては、軍事用途では次の 4 つの主要なテクノロジー モジュールを考慮する必要があります。センシング機能から群通信プロトコルやルーティングに至るまで、各モジュールはドローン群のパフォーマンスと安定性にとって重要です。
ドローン群は自律型または半自律型ドローンのグループで構成され、群れ内のドローンは共通の目標を達成するために互いに協力できます。ドローンの群れは、偵察、監視、攻撃作戦などのさまざまな軍事任務に使用できます。ドローン群の設計に関しては、軍事用途では次の 4 つの主要なテクノロジー モジュールを考慮する必要があります。センシング機能から群通信プロトコルやルーティングに至るまで、各モジュールはドローン群のパフォーマンスと安定性にとって重要です。
1. 知覚能力: ドローンの群れにとって知覚能力は非常に重要です。この機能により、群れは環境を感知して理解し、障害物を検出し、ターゲットを特定し、状況認識を維持することができます。効果的なセンシング機能により、ミツバチのコロニーは複雑な動的環境で動作し、さまざまな複雑なタスクを効率的に実行できます。機械学習と人工知能テクノロジーは、認識能力を強化できます。 Swarm は、センサー フュージョンを通じて前例のない状況認識を実現できます。
2. タスクの割り当てと意思決定:タスクの割り当てと独立した意思決定は、ドローンの群れにとって非常に重要です。効率的なタスク処理により、各ドローンにその能力に見合ったミッションが割り当てられ、利用可能なリソースの使用が最適化されます。 1 台または複数のドローンが故障した場合、群れは自動的にギャップを埋めることができ、タスクの割り当てにより決定事項が迅速に伝達され、群れが変化する環境に迅速に適応できるようになります。タスクの分散は、適応性、拡張性の向上、意思決定のスピードアップにも役立ち、動的で不確実な環境において群をより効果的にします。群れ内のドローン間のシームレスなデータ交換により、群れはより適切な意思決定を行うことができ、リソースの効率的な利用、安定性、耐障害性、適応性、拡張性が向上します。 3. 経路計画と衝突回避: ドローンの群れは通常、多数のドローンで構成されます。ドローン群の効率的かつ安全な運用を実現するには、経路計画と衝突回避方法が重要です。群れの経路計画の中核は、障害物を回避し、必要な時間とエネルギーを最小限に抑えながら、各ドローンが目的地に到達するための最適な経路を見つけることです。衝突回避によりドローンが衝突することがなくなり、各ドローンが無事に任務を完了できるようになります。たとえば、監視ミッションでは、経路計画によりドローンの行動ルートを最適化し、重複するエリアを最小限に抑え、カバー範囲を拡大できます。現在、経路計画と衝突回避を実現するための、集中型の方法や分散型の方法など、さまざまな技術が存在します。集中型アプローチには、個々のドローンの計画と、群れ内のすべてのドローンの経路の調整が含まれます。分散型アプローチでは、各ドローンがローカル情報に基づいて独自の経路計画の決定を行います。 4. 通信: 群れ内のドローン間の通信が遅延なくオープンなままであれば、群れは最適に動作します。センサー フュージョンを通じて、群れは高決定性と高解像度の情報を提供できます。効果的な通信プロトコルにより、ドローンは位置、ステータス、タスクの割り当てなどの情報を共有できるようになり、ルーティングはドローン間の情報伝達に最適なパスを見つける役割を果たします。これにより、群れが連携して行動を調整し、リアルタイムで情報を共有できるようになります。現在、アドホックネットワーク技術、メッシュネットワーク技術、マルチホップルーティング技術など、通信プロトコルやルーティングを実現するさまざまな技術が存在しています。アドホック ネットワークにより、固定インフラストラクチャを必要とせずにドローン同士が直接通信できるようになります。一方、メッシュネットワークはドローンを利用して通信経路を冗長化したネットワークを形成します。マルチホップルーティングによりドローン間での情報の中継伝送を実現し、より長距離の通信を実現します。 UAV 群の通信プロトコルは、ミッション要件と群の特性に応じて調整して、情報交換を実現できます。現在、軍用ドローンの群れを設計するには、次の 3 つの主要なアーキテクチャ アプローチがあります。
1. 集中型アーキテクチャ: このアプローチでは、群れ内のすべてのドローンの運用が地上管制局などの中央制御エンティティによって調整されます。中央制御エンティティは、群れと通信してデータを収集し、データを処理し、意思決定を行うことができます。この方法は、小さなコロニーや単純なタスクに適しています。
2. 分散型アーキテクチャ: このアプローチでは、中央制御エンティティは存在せず、群れ内の各ドローンは独立して動作し、ローカル情報に基づいて意思決定を行い、他のドローンが運ぶものと対話することができます。アウト情報コミュニケーション。このアプローチは、大規模な群集ミッションやその他の非常に複雑なタスクに適しています。
3. ハイブリッド アーキテクチャ: このアプローチは、集中型アーキテクチャと分散型アーキテクチャの利点を組み合わせたものです。このアプローチでは、ドローンに高レベルのナビゲーションを提供する中央制御エンティティがあり、各ドローンは自律的な意思決定機能を備えています。
1. エリア カバレッジ: エリア カバレージ作戦では、群れの任務は、ドローンに搭載されたセンサーを使用して特定のエリアをスキャンすることです。ほとんどの場合、理想的なエリア カバレージは 100% であり、ドローンはエリアを完全にスキャンする必要があります。複数のドローンでエリアをカバーすると、いくつかの問題が発生する可能性があります。これらの問題に対処する一般的な方法には、分解技術を使用して焦点エリアを一連のサブエリアに分割し、各サブエリアにドローンを展開することが含まれます。さまざまなタイプのドローンを含む群れの場合、システムの効率を向上させるために、エリア分割プロセス中にセンサーの範囲、ドローンの操作性、および範囲を考慮する必要があります。各ドローンにサブエリアが割り当てられた後、これらのドローンはそれぞれのエリア内での経路を個別に計画する必要があります。カバレッジ パスの計画方法には、2D、3D、およびマルチ UAV エリア カバレッジが含まれます。
2. 包括的かつ持続的なエリア カバレッジ: 包括的かつ持続的なエリア カバレッジには、ドローン群の展開と、ミッション全体を通じて特定のエリア全体にセンサー カバレッジを提供する能力が必要です。群れ内のドローンは、センサーの位置と、障害物や遮蔽領域などの考えられる環境特徴に基づいて編隊を形成する必要があります。群れ内の UAV は、地域の特性や監視エリアが時間の経過とともに変化するにつれて、静的または動的に展開されます。主な目的は、最小限のドローン数で完全な静的カバーを達成する編隊パターンを設計することです。
3. エリア捜索: エリア捜索作戦では、ドローン群の任務は通常、主要エリアで特定の目標を捜索することです。この操作では、エリアを完全にカバーする必要はありません。群れはエリア内のターゲットを最短時間で特定しなければなりません。群れ内のドローンはミッション全体を通じて協力する必要があり、オンラインの意思決定と経路計画技術を使用して、環境に対する自身の認識と他のドローンの動作に基づいてシステムのパフォーマンスを向上させます。群集領域検索アルゴリズムを使用して、ターゲット分布の確率を予測できます。バイオニックスウォームアルゴリズムは、エリア捜索活動においても科学的な関心を集めています。 4. エリア監視: エリア監視操作では、群れが特定のエリアを継続的に監視する必要があります。エリア監視は通常、パトロール、監視、緊急または動的な脅威の検出、国境警備に使用されます。このアクションは、2 つの長い監視期間の間の時間を最小限に抑えることを目的としています。 5. ターゲット追跡: 通常のターゲット追跡操作には、ターゲットとドローンが関与します。ドローンの追跡範囲は、センサーデータとターゲットの位置の推定、場合によってはターゲットの予測された行動や将来の位置に基づくオンライン経路計画に基づいています。ドローンは常にターゲットを追跡できるように、自律的に航行する必要があります。群機能の導入により、単一または複数のターゲットを追跡できる複数のドローンでターゲット追跡タスクを完了できるようになります。 軍用ドローンの群れの設計には、ミッション要件、群れのサイズ、通信能力、コンピューティング リソースなど、複数の要素を包括的に考慮する必要があります。
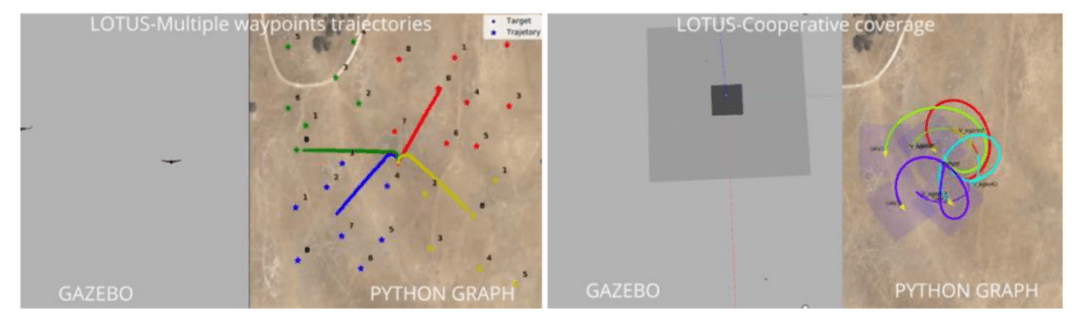
1. 低可観測性無人航空機システム「LOTUS」
図 2: 「Lotus」プロジェクトにおけるドローンの群れアクションの例 2. 防衛用途向けの自律的で再構成可能なドローン群 - 「ACHILLES」。
書き直された内容: ACHILLES は防衛用途向けの自律的で再構成可能なドローン群です
3. 有人・無人システム護衛運用「COMMANDS」プロジェクト
書き換え内容:3. 有人・無人システムの護衛運用「COMMANDS」 「コマンド」プロジェクトは、10 か国の 21 社が参加する欧州国防基金 (EDF) プロジェクトです。 2022 年 12 月に開始される 3 年間のプロジェクトは、Sener Aerospace が主導し、7 か国の国防省の支援を受けています。これらの国の防衛省は、プロジェクト開発の基本要件もプロジェクトに提供します。プロジェクトの目標は、機敏でインテリジェントで協調的な有人および無人のシステム ライフサイクル機能 (TLC) を開発することです。このプロジェクトには、シームレスな機能サービスとデータ交換を通じてスウォーミング機能を可能にするいくつかのモジュラー システムが含まれます。このシステムは、有人および無人の地上車両とドローンで構成されます。プロジェクトのリスクを軽減するために、このプロジェクトではさまざまなテクノロジーを使用して、自立可能な EU 防衛 TLC の持続可能性ロードマップを開発しています。最終的に、このプロジェクトは既存の地上車両をアップグレードし、将来の車両に統合される予定です。このプロジェクトでは、技術デモンストレーターを通じて技術を検証する予定です。このデモンストレーターは、「ラストマイル」補給を行う輸送船団に武装護衛を提供することに重点を置き、現実のシナリオで実験室やモバイルデモンストレーターで実施されます。
3.ミツバチコロニープロジェクトの申請
4. 影響
Swarm テクノロジーにより、多数のドローンが高度に相互接続され、ミッション目標を効果的に計画および割り当て、調整された戦術的決定を下し、オペレーターに推奨事項を提示しながら、最小限の監視で動的な環境に協力して対応することが可能になります。スウォームテクノロジーが成熟するにつれて、軍事分野での応用も発展しています。多くの人は、群れの開発を精密兵器の開発に喩えることができると信じています。精密装備の兵器は 1970 年代と 1980 年代にテストされ、改良されましたが、1990 年代初頭の第一次湾岸戦争まで登場しませんでした。群れの使用は、現在低高度および中高度の監視および攻撃任務に使用されている有人防衛システムを時代遅れにする可能性がある。今後数十年で、ドローンなどの遠隔操作の単一の無人機器は時代遅れになり、空、地上、海上の無人航空機システムが複数のドローンを配備して群れで戦うことができるようになり、これにより戦闘範囲と監視範囲が拡大します。 、さまざまなミッションを実行するためのUAVのISTAR能力と攻撃能力を向上させます。 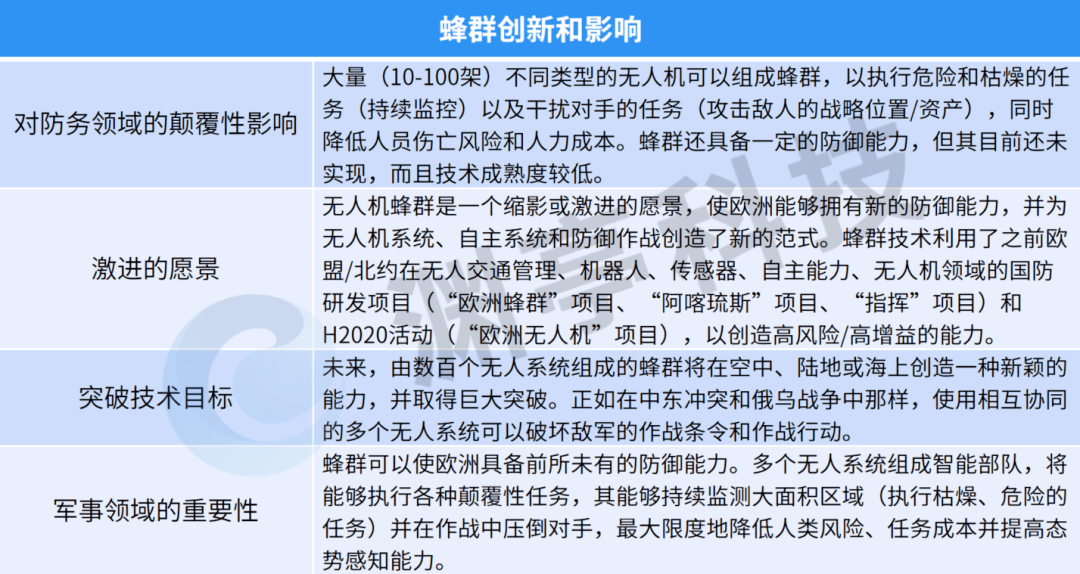
5. 概要
NATO の多国籍国防省は、F-35 戦闘機、ブリティッシュ ストーム次世代戦闘機、FCAS 航空機/無人航空機システムなどの既存の兵器システムとスワーム技術を統合する意向を発表しました。スウォームテクノロジーが世界中の軍事能力と統合され、各国の防衛能力に影響を与え始めていることは明らかです。スワームは、複数の技術分野の開発を直接促進する重要な軍事技術です。たとえば、このテクノロジーは、組み込みの群れや自律システムの人工知能テクノロジーを最適化し、構造化されていない、急速に変化する、制限された対立的な環境で運用される防衛システムの共同運用の安全性、効率性、有効性を効果的に向上させることができます。ロシアとウクライナの戦争や中東の紛争で見られるように、群発テクノロジーは無人機の群れや徘徊兵器の使用を通じて戦争を変えています。したがって、自律的な群れシステムの開発は、ヨーロッパの防衛、安全保障、繁栄にとって不可欠です。
以上がドローンの群れ: 防衛用途における革新的なテクノロジーの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7518
7518
 15
1378
52
81
11
21
68
15
1378
52
81
11
21
68

 2024年DJIドローンランキング:各モデル5万台以上の販売実績あり、あなたはどれを使ったことがありますか?
Dec 16, 2023 pm 05:33 PM
2024年DJIドローンランキング:各モデル5万台以上の販売実績あり、あなたはどれを使ったことがありますか?
Dec 16, 2023 pm 05:33 PM
やあやあ!私はユアン・ハハです、注目してください、もっとエキサイティングなコンテンツがあなたを待っています。ドローン技術の絶え間ない進歩により、私たちは今、最も重要で信頼性の高い4Kカメラの1つを数千元の予算内で購入できるようになりました。これは何台ですか数年前には想像もできなかった時代。 DJI、Autel、その他の企業の継続的な努力により、この夢が現実になりました。全体的に選ばれたドローンは DJI Mavic 3 Pro です。このドローンは、超高解像度の録画を提供するだけでなく、優れたフレーム レートと長時間の録画を提供します。長持ちするバッテリーの寿命。私の個人的な経験に加えて、ウェブ上の肯定的なレビューに基づいて選択できる他のトップドローンをいくつかまとめました。それでは、これらのエキサイティングなオプションを見てみましょう。
 ドローンの群れ: 防衛用途における革新的なテクノロジー
Nov 14, 2023 pm 08:53 PM
ドローンの群れ: 防衛用途における革新的なテクノロジー
Nov 14, 2023 pm 08:53 PM
要約: スウォーミングは、複数の領域 (陸、海、空、宇宙) で複数の無人システムを共同展開する、破壊的で革新的なテクノロジーです。新しいマイクロエレクトロニクス、誘導、ナビゲーション、センサー、人工知能技術の開発により、低コストのマイクロドローンが困難なミッションを実行できるようになりました。新しい意思決定プロセス、目標追跡、通信技術およびアルゴリズムと組み合わせると、群れは戦場に大きな影響を与える可能性があります。また、巡航ミサイルの迎撃などの重要な防衛能力だけでなく、継続的かつ検出不可能な監視能力を提供するためにも使用できます。この記事では、スウォーミングの分野におけるヨーロッパの研究活動について説明し、それが防衛に与える可能性のある重要な意味を掘り下げます。キーワード: UAV、自律機能、目標追跡、
 国産最大の無人輸送機が初飛行に成功 中国航空工程集団のAEP100-Aエンジン搭載
Aug 23, 2024 am 07:32 AM
国産最大の無人輸送機が初飛行に成功 中国航空工程集団のAEP100-Aエンジン搭載
Aug 23, 2024 am 07:32 AM
8月22日の当サイトのニュースによると、中国航空動力集団有限公司は本日6時28分、中国航空工業が完全に独自に開発した900キロワットのターボプロップエンジンAEP100-Aを正式発表した。社、陝西省で大型無人輸送機SA750Uの初飛行に成功。報道によると、AEP100-Aターボプロップエンジンは中国航空宇宙工学研究院によって設計され、韓国で製造されており、3次元の空力設計とユニット設計技術を使用して高温や平地に適応する能力を備えています。燃費を向上させながら、航空機の全体的な運用効率を向上させます。 AEP100ターボプロップエンジンシリーズは、2~6トンの汎用航空機や3~10トンの無人航空機に搭載可能であり、その総合性能は現在運用されているものと同レベルの国際先進レベルに達しています。このサイトが以前に報告した
 我が国初の積載量3トンを超える大型無人輸送機「SA750U」が国産システムと資材で初飛行に成功
Aug 23, 2024 am 07:31 AM
我が国初の積載量3トンを超える大型無人輸送機「SA750U」が国産システムと資材で初飛行に成功
Aug 23, 2024 am 07:31 AM
8月22日の当サイトのニュースによると、「山和華宇」の公式公式アカウントによると、本日6時28分、サンワード華宇航空技術が独自に開発し、サンワードスターの戦略調整により完成した大型無人輸送機SA750Uが完成した。航空会社は西安市京辺から飛行し、実験用ドローン試験センターが初飛行に成功した。 ▲写真出典「山河華宇」公式公式アカウント、以下同 報道によると、40分間の飛行試験中、機体のすべてのシステム機器は正常に動作し、機体の姿勢は安定していたという。性能は設計仕様を満たし、予定された飛行課題を完了した後、飛行機は順調に帰還し、最初の飛行は完全に成功した。 SA750Uは、荷重3トンを超える我が国初の大型無人輸送機であり、山和華宇会社はコンセプト設計から初号機の初飛行成功までの全過程をわずか2年8か月で完了した。
 Wing Loong UAV が再び空へ飛び、甘粛省の空中基地局となる
Dec 21, 2023 am 08:13 AM
Wing Loong UAV が再び空へ飛び、甘粛省の空中基地局となる
Dec 21, 2023 am 08:13 AM
ウイングロン2H無人機は再び甘粛省獅子山県へ向かい、災害偵察や緊急通信支援などの災害救援任務を遂行した。このタイプのドローンは「航空基地局」と呼ばれ、チャイナモバイル、チャイナユニコム、テレコムの公衆ネットワーク信号ネットワークを継続的に復旧し、50平方キロメートルの公衆ネットワーク通信を指向性復旧し、15,000をカバーする音声およびビデオ通信ネットワークを確立することができます。平方キロメートル。ウィングロン2Hは、2021年に河南省鄭州での大雨災害救助と2022年に四川省魯定地震救助で好成績を収め、任務を無事に完了した。出典: CCTV Military Weibo
 国産の Wing Loong シリーズ ドローン: 気象学、緊急事態、セキュリティなどの多くの分野をカバーする、多分野のアプリケーションに新たな章を書き込む
Dec 01, 2023 pm 05:47 PM
国産の Wing Loong シリーズ ドローン: 気象学、緊急事態、セキュリティなどの多くの分野をカバーする、多分野のアプリケーションに新たな章を書き込む
Dec 01, 2023 pm 05:47 PM
科技日報によると、11月28日、四川省自貢市のAVIC UAV拠点で、中国航空工業総公司は「大国の翼ある龍が世界を旅する」をテーマとした一般公開イベントを開催した。国産大型ドローンを展示 ハイエンドドローン開発や産業建設における開発実績。 10年以上の開発期間を経て、AVIC UAVが独自に開発した国産UAV製品「翼竜」シリーズは血統を形成しました。ウィングロン2号は国有企業の一般公開日に登場し、飛行デモンストレーションを行った。ウィングロン 2 は、航空業界によって開発された中高高度、長期耐久性の多目的 UAV システムであり、終日、全天候、全領域、および複数のシナリオのミッション実行能力を備えています。この無人航空機システムは我が国初の国産大型ターボプロップ動力無人航空機システムであり、高度な空力レイアウト、機体構造、
 パナソニック、ドローン用全固体電池を量産へ、3分で80%充電可能と主張
Sep 21, 2023 pm 08:21 PM
パナソニック、ドローン用全固体電池を量産へ、3分で80%充電可能と主張
Sep 21, 2023 pm 08:21 PM
パナソニックホールディングスは9月12日、ドローンなど用途向けに開発中の小型全固体電池について、2020年代後半(つまり2025年から2029年)に量産を開始する計画を発表した。日経新聞によると、パナソニックホールディングスは実用化できれば、ドローンのバッテリー容量の80%を約3分で充電できる見込みだとしている。充電に約1時間かかる従来のリチウムイオン電池に比べ、利便性が大幅に向上します。パナソニックホールディングスは技術実証をメディアや顧客企業に初めて公開し、全固体電池を紹介した。金属材料の組成など詳細は明らかにしていないが、関係者によると、通常のリチウムイオンの充放電回数約3000回をはるかに上回る数万回の充放電が可能になる見込みという。電池。新世代の車両バッテリーバックアップとしての全固体電池
 チャイナモバイル:ドローンコーヒー配達の初試験飛行に成功
Jun 01, 2024 pm 12:30 PM
チャイナモバイル:ドローンコーヒー配達の初試験飛行に成功
Jun 01, 2024 pm 12:30 PM
手がかりを提出してくれたネチズン Mr. Aviation に感謝します! 5月29日のニュースによると、チャイナモバイルは、チャイナモバイルと成都天府新区投資集団が共同開発したドローンコーヒー配達機が初の試験飛行に成功したと発表した。 ▲成都科荘島、離陸地点で「命令を待っている」 物流ドローンの飛行速度は毎秒15メートル、つまり900メートルに達することが分かった。積載量が 4.5 キログラム未満であれば、通常、片道の物流配送は 10 分で完了します。現在、成都科荘生態島のドローン配送ルートはホール1からW7まで計画されており、後に島全体と興龍湖周辺のホットスポットもカバーする予定だ。 ▲注文を受けてバリスタがドリンクをドローンの「輸送倉庫」に入れる 物流ドローンは他のドローンとは異なり、バックグラウンドで操作されるため専門の人員は必要ない。
