

概要: BIT チームが検討したバイオハイブリッド ロボット用の電源ソリューションの完全なレビュー

Xiaoqiang にプラグインを追加すると、Super Xiaoqiang に変身します。携帯電話を使用して制御することもできます:

それか、ジェリーの体にチップを埋め込んでトムキャットがジェリーをいじめられないようにするか

動物がその完全な体を見せびらかすとき、これは新種、バイオハイブリッド ロボットです。
これらのバイオハイブリッド ロボットにはさまざまな電子機器が装備されているため、人々はこれらの動物を制御し、危険な場所にタスクを実行させることができます。 バイオニックロボットと比較して、バイオハイブリッドロボットは動物の体を利用してより柔軟に動き、より複雑な環境でも移動できます。
しかし、これは電源が必要ないという意味ではありません。実際、動物の装置は通常、神経終末や筋肉の電気刺激に依存して動物の行動を制御しており、それには電気の使用が必要です。さらに、埋め込みチップなどの他のデバイスも電力を消費するため、これらのデバイスに持続的な電力供給を提供する方法が依然として問題です。
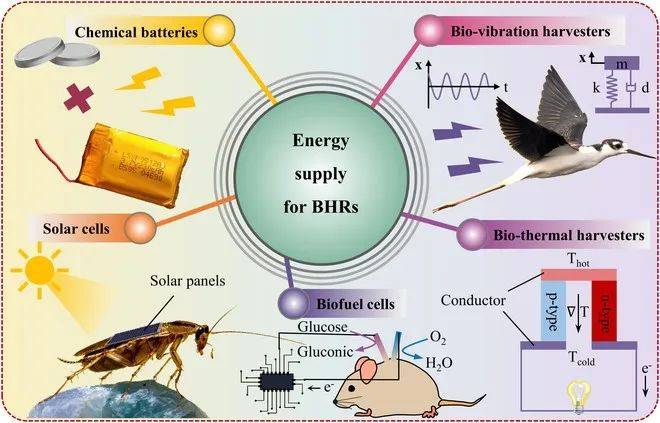
現在、これらのバイオハイブリッド ロボットで使用されるバッテリーは通常、次のカテゴリに分類されます。
一般的な電池には、化学電池(ボタン電池など)、太陽電池、バイオ燃料電池(生物の化学エネルギーを利用する)、生物熱発電装置(生物の体温を収集して利用する)、生体振動などがあります。収穫装置 (動物の動きによって充電)
https://spj.science.org/doi/10.34133/cbsystems.0053 (記事左下の「原文を読む」をクリックしてリンクに入ります)
▍化学電池
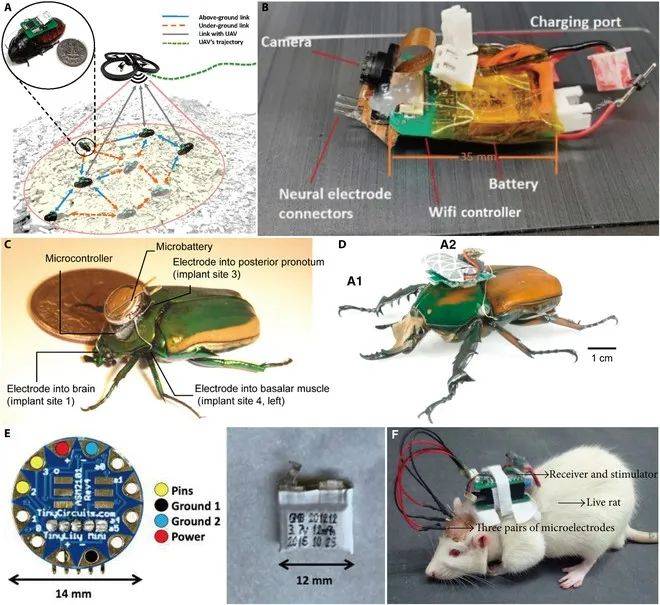
化学電池は非常に成熟した技術であるため、バイオハイブリッド ロボットに電力を供給するための最初の選択肢でもあります。化学電池は昆虫ロボットの動力源としてよく使用されます。たとえば、昆虫の中で最大のマダガスカルゴキブリは、よく捕獲され、「クーリー」として使用されます。科学者たちはゴキブリに制御バックパックを装着し、
リチウムイオン電池を使用してこのゴキブリと機械のハイブリッドロボットを駆動しました。 ゴキブリにハイテクベストを着せたような気分ですか?
さらに、ロボット ゴキブリの低電力 Bluetooth ワイヤレス トランシーバーやその他の小型部品 に電力を供給するためにボタン電池が使用されています。これらの小さな部品は実験で厳密にテストされており、それぞれ 12 時間の連続動作が可能です。
リチウムポリマー電池は、エネルギー密度が高く、非常に軽いため、大スターになりました。ゴキブリにリチウムポリマー電池を持たせて、 がスーパー昆虫に変身して災害救助のヒーローになることを想像してみてください。
さらに、7.4V、125 mAh のリチウム ポリマー バッテリーを使用して CameraRoach という名前のゴキブリ ロボットに電力を供給しているチームもあります。 この男のカメラは千里眼のようなもので、いつでも自分の位置を送信機に報告することができ、また昇圧コンバーターを通じてより多くのエネルギー供給を得ることができます。他の人は、バッタのジャンプを制御するために特に使用される、ボタン電池で動作するマイクロ制御バックパックを発明しました。これにより、バッタは 10 分以上で 20 回以上ジャンプすることができます。
昆虫ロボットを除いて、彼らは海洋生物さえも容赦しません。
あるチームは、10mAhのリチウムポリマー電池を使用するクラゲロボットも開発しました。この超小型電子コントローラーは、いつでもクラゲを動かすことができる、持ち運び可能な自給自足の小型装置のようなものです。 対照的に、マウス、魚、ハトなどの脊椎動物はバッテリーの重量をそれほど気にしないため、現時点では科学者はバッテリーの全体的な性能により注意を払っています。ここで最も一般的に使用されるバッテリーはリチウム ポリマー バッテリーです。たとえば、マウスが搭載する小型カメラと電子部品に電力を供給するために 2 つの 120mAh リチウム ポリマー バッテリーを使用するマウス ロボットがあります。マウスはスムーズに操作できます。迷路を脱出してください。 3.7V、120mAhのリチウムポリマーバッテリーを搭載したピジョンナビゲーションコントロールシステムもあります。
太陽電池は、太陽エネルギーを使用して電気エネルギーに変換する装置です。太陽光を電流に変換することで持続可能なエネルギー利用を可能にします。太陽電池は通常、太陽光を吸収して電子の流れを生成する複数の太陽電池で構成されています。この電子の流れは電線を通って輸送され、最終的には使用可能な電気に変換されます。太陽電池は家庭、産業、農業、その他の分野で広く使用され、人々にクリーンで再生可能なエネルギー源を提供します。技術の発展に伴い、太陽電池の効率とコストは向上し続けており、太陽光発電は実行可能で持続可能なエネルギーの選択肢となっています
サイズ 25mm²、質量 63mg のソーラー チップを使用して蛾ロボットに電力を供給している人もいます。動作原理は電池と非常によく似ており、その電圧は 4V です。自然光の下では、太陽電池はほぼ 200 μW の安定した出力を生成できますが、人工照明条件や日陰では出力が 4 μW にまで低下する可能性があります。
20mA バッテリーは、直射日光や拡散太陽光、集中した白色光 LED、または 8cm 離れたランプの下で 2 時間以内に完全に充電できることが示されています。
バイオ燃料電池は、バイオマス材料を燃料として使用し、電気エネルギーに変換する装置です。作物残渣、廃棄物、植物油などのバイオマス資源を利用し、化学反応により発電します。バイオ燃料電池は再生可能、低排出、高効率であり、エネルギー分野で広く使用されています。これは環境に優しく持続可能なエネルギー ソリューションと考えられており、将来的には従来の燃料電池に代わるものとして期待されています
「羊毛は羊から得られる」 つまり、エネルギーは動物自体を通じて供給されます。たとえば、 バイオ燃料電池は、生体内の化学エネルギーを電気エネルギーに変換します。
微生物燃料電池と酵素燃料電池に分類されます。 酵素バイオ燃料電池 (EBFC) は、体内のグルコースを酸化する触媒として酵素を使用し、生物の移植に最も適していると考えられています。体。 ただし、この種の電池は、ネズミ、ウサギ、ハトなどの大型動物に適していますが、昆虫への使用には適していません。 ハトの体からのグルコースと酸素を使用するバイオ燃料電池の出力は、体外で 0.12 mW、体内で 0.08 mW です。 電源管理集積回路を使用すると、10 分間で 28.4 mJ のレートで十分なエネルギーを収集できます。
通常の化学電池と比較すると、 理論上は電池を継続的に動作させることができます。無限に実行します。しかし実際には、この種の電池の耐用年数は非常に短く、エネルギー密度も比較的低いため、多くの研究者はナノ材料を燃料電池の製造に使用することに期待を寄せています。
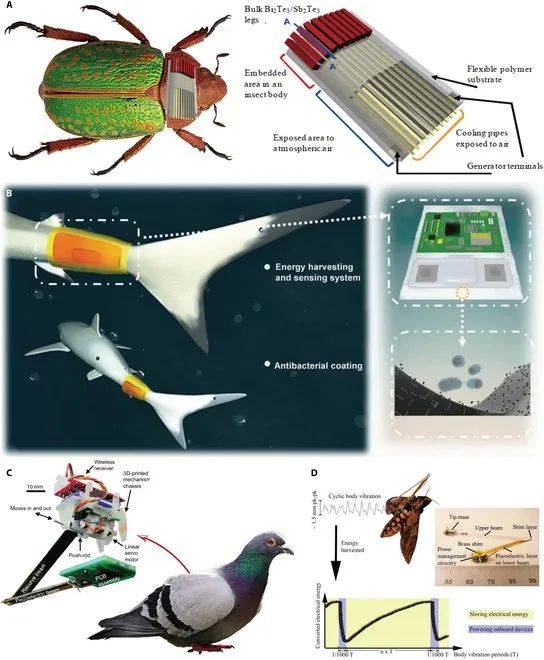
▍生物熱エネルギー回収装置 動物の体温は電子機器に電力を供給するためにも利用できます。しかし現在、これは主に人間に対して使用されています。自ら電力を供給できるウェアラブル電子デバイスを作成するために、 科学者は多くの種類の熱電変換デバイスを研究してきました。 これらのデバイスは体温を電気エネルギーに変換できます。 ウェアラブル デバイスの携帯性を考慮して、 科学者は、温度差を利用して発電する方法、熱電変換デバイスの低温側と高温側を最適化する方法、および材料や装置をよりフレキシブルにし、2次元から3次元まで様々な特性をいかに最適化するか。 動物に関しては、 誰かが羊の首に熱電エネルギーハーベスターを設置しました。その最大平均出力は 173 マイクロワットに達します。 カブトムシに埋め込むことができる小型の熱電エネルギーハーベスターを設計した科学者もいます。 このコレクターの熱電対の材質は Bi2Te3/Sb2Te3 で、幼虫の甲虫の背中に設置できます。このコレクタの低温端は空気にさらされて温度差が生じ、熱電対と低温端の両方が柔軟なポリマー基板に取り付けられています。このハーベスタは、温度差 11°C で平方センチメートルあたり 10 マイクロワットの出力電力密度を達成できます。
一般に、生物熱エネルギーコレクターは非常に効率的で環境に優しいものですが、その動作原理にはいくつかの制限があり、十分な温度差がある場合にのみ、より多くの電力を生成できます。 したがって、この種のコレクタの電力密度は比較的低く、より高い電力供給のニーズを満たすことが困難です。
いくつかの新しい材料の設計と合成、コレクタの効率を向上させるためのいくつかのマイクロナノ構造の設計など、さまざまな側面で研究を行っています。 これらの研究の目的は、より効率的で出力密度の高い生物熱電エネルギーハーベスタを作成することです。
生体振動エネルギーハーベスタは、生物の振動からエネルギーを採取できる装置です。
動物は動くときに振動を発生しますが、これは電力を供給するためにも使用できます。最も研究されている振動電気変換メカニズムは、圧電変換、電磁変換、静電変換に基づいています。 振動収集装置は魚、ハト、キジ、キリンに使用されており、抗菌コーティングで覆われたエアバッグ摩擦ナノ発電機を開発して魚ロボットに動力を供給する人さえいます。
生体振動エネルギーハーベスタは、低いエネルギー変換効率、低い電力密度、狭い周波数帯域幅、不十分な小型化と集積化など、現時点でいくつかの問題を抱えています。 複合材料技術、ハイブリッドエネルギー変換機構、多重安定構造、周波数アップコンバート構造など、さまざまな側面から研究を行っています。
つまり、バイオハイブリッドロボットのエネルギーシステムは、バイオハイブリッドロボットが将来的にスムーズに開発できるかどうかを決定するため、多くの研究者の注目を集めています。現在使用されているエネルギーは安定して電力を供給できる化学電池が中心です。 しかし、化学電池には、 しかし、より重要なのは、バイオハイブリッド ロボットのエネルギー供給をいかに長持ちさせ、バッテリー交換や充電によるロボットの通常動作への影響を回避するかです。
この問題を解決するために、研究者たちは太陽エネルギー、生体エネルギー、生物熱エネルギー、生体振動エネルギーを利用できる自家発電装置を研究しています。 現在研究されている自己給電型デバイスには、変換効率が低い、出力が小さい、エネルギー供給が不安定、生体担体との適合性が低いなどの問題がまだ残っています。 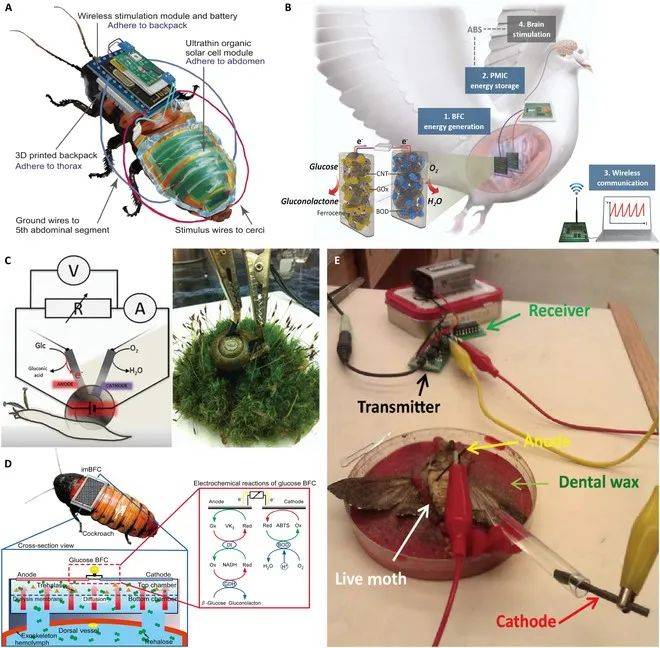
以上が概要: BIT チームが検討したバイオハイブリッド ロボット用の電源ソリューションの完全なレビューの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7333
7333
 9
1627
14
1352
46
1264
25
1209
29
9
1627
14
1352
46
1264
25
1209
29

 モデルコンテキストプロトコル(MCP)とは何ですか?
Mar 03, 2025 pm 07:09 PM
モデルコンテキストプロトコル(MCP)とは何ですか?
Mar 03, 2025 pm 07:09 PM
モデルコンテキストプロトコル(MCP):AIとデータのユニバーサルコネクタ 私たちは皆、毎日のコーディングにおけるAIの役割に精通しています。 Replit、Github Copilot、Black Box AI、およびCursor IDEは、AIがワークフローを合理化する方法のほんの一部です。 しかし、想像してみてください
 Omniparser V2とOmnitoolを使用して地元のビジョンエージェントを構築する
Mar 03, 2025 pm 07:08 PM
Omniparser V2とOmnitoolを使用して地元のビジョンエージェントを構築する
Mar 03, 2025 pm 07:08 PM
MicrosoftのOmniparser V2とOmnitool:AIでGUIオートメーションに革命をもたらす 味付けされた専門家のように、Windows 11インターフェースと相互作用するだけでなく、熟練したプロのように相互作用するAIを想像してください。 MicrosoftのOmniparser V2とOmnitoolはこれを再生します
 カーソルAIでバイブコーディングを試してみましたが、驚くべきことです!
Mar 20, 2025 pm 03:34 PM
カーソルAIでバイブコーディングを試してみましたが、驚くべきことです!
Mar 20, 2025 pm 03:34 PM
バイブコーディングは、無限のコード行の代わりに自然言語を使用してアプリケーションを作成できるようにすることにより、ソフトウェア開発の世界を再構築しています。 Andrej Karpathyのような先見の明に触発されて、この革新的なアプローチは開発を許可します
 レプリットエージェント:実用的な例を備えたガイド
Mar 04, 2025 am 10:52 AM
レプリットエージェント:実用的な例を備えたガイド
Mar 04, 2025 am 10:52 AM
アプリ開発の革新:レプリットエージェントに深く潜ります 複雑な開発環境と不明瞭な構成ファイルとの格闘にうんざりしていませんか? Replit Agentは、アイデアを機能的なアプリに変換するプロセスを簡素化することを目的としています。 このai-p
 Runway Act-One Guide:私はそれをテストするために自分自身を撮影しました
Mar 03, 2025 am 09:42 AM
Runway Act-One Guide:私はそれをテストするために自分自身を撮影しました
Mar 03, 2025 am 09:42 AM
このブログ投稿では、Runway MLの新しいAct-One Animationツールの経験をテストし、WebインターフェイスとPython APIの両方をカバーしています。約束しますが、私の結果は予想よりも印象的ではありませんでした。 生成AIを探索したいですか? PでLLMSを使用することを学びます
 2025年2月のトップ5 Genai発売:GPT-4.5、Grok-3など!
Mar 22, 2025 am 10:58 AM
2025年2月のトップ5 Genai発売:GPT-4.5、Grok-3など!
Mar 22, 2025 am 10:58 AM
2025年2月は、生成AIにとってさらにゲームを変える月であり、最も期待されるモデルのアップグレードと画期的な新機能のいくつかをもたらしました。 Xai’s Grok 3とAnthropic's Claude 3.7 SonnetからOpenaiのGまで
 オブジェクト検出にYolo V12を使用する方法は?
Mar 22, 2025 am 11:07 AM
オブジェクト検出にYolo V12を使用する方法は?
Mar 22, 2025 am 11:07 AM
Yolo(あなたは一度だけ見ています)は、前のバージョンで各反復が改善され、主要なリアルタイムオブジェクト検出フレームワークでした。最新バージョンYolo V12は、精度を大幅に向上させる進歩を紹介します
 Elon Musk&Sam Altmanは、5,000億ドルを超えるスターゲートプロジェクトを超えて衝突します
Mar 08, 2025 am 11:15 AM
Elon Musk&Sam Altmanは、5,000億ドルを超えるスターゲートプロジェクトを超えて衝突します
Mar 08, 2025 am 11:15 AM
Openai、Softbank、Oracle、Nvidiaなどのハイテク大手に支援され、米国政府が支援する5,000億ドルのStargate AIプロジェクトは、アメリカのAIリーダーシップを固めることを目指しています。 この野心的な仕事は、AIの進歩によって形作られた未来を約束します
