

Samsung XR の特許取得済みの共有ブレイン コンピューター インターフェイスは、匂い、味などの完全な感覚フィードバック刺激を提供します。

(Nweon 2023 年 11 月 27 日) 以前の情報によると、Samsung は完全なメタバース戦略を策定し、Samsung 中心の XR エコシステムの構築を目指しており、人材を積極的に採用しています。特許出願によると、同社は実際に究極のブレイン・コンピューター・インターフェースを検討しているという。
かつては、ブレイン コンピューター インターフェイスの研究は、Meta、Valve、その他の新興企業の間でより一般的でした。もちろん、マイクロソフトのような企業もそれを検討しています。現在、XR 分野に積極的に展開している企業は、より高度なブレイン コンピューター インターフェイスを模索し始めています。 Samsung は、「情報生成方法および装置」というタイトルの特許出願で、ブレイン コンピューター インターフェイスを XR 感覚フィードバック刺激の分野に適用することを提案しました。
同社では、XR 技術では主にセンサーをベースにさまざまな感覚シミュレーションを実装すると考えています。しかし、各感覚シミュレーションはセンサーを介して実現されるため、プロセスが煩雑です。さらに、センサーは十分に包括的ではないため、多くのシミュレーションを実装できません。言い換えれば、関連するセンサーを使用して得られる効果は現実とはかけ離れており、ユーザーは現実的なシミュレーションを得ることができません。したがって、サムスンは、ブレイン コンピューター インターフェイス デバイスを使用して現実的な感覚シミュレーションを提供できることを提案しています。その中で、システムは、仮想環境内の対象オブジェクトに対するユーザーの位置に関する情報を取得し、位置情報と属性情報に基づいて対象オブジェクトに対応する感覚情報を決定し、最終的に感覚情報を電気信号に変換し、それらをブレインコンピュータインターフェースデバイスに通してユーザーを刺激します。
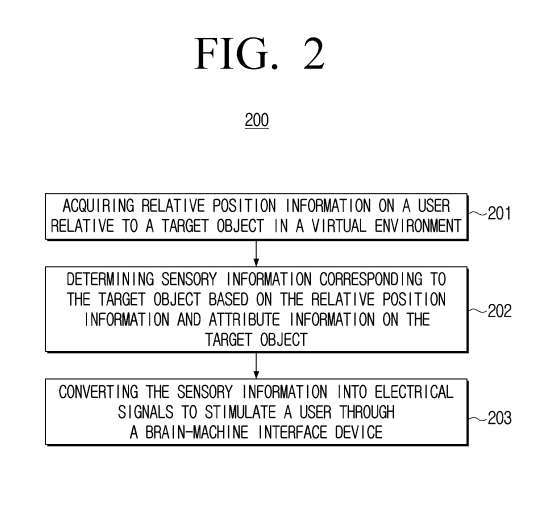 ### 例示的な実施形態による、図2は関連情報生成フローチャート200を示す。情報生成方法は、仮想環境における対象オブジェクトに対するユーザの相対位置情報を取得する動作201##を含む。
### 一実施形態では、互いに協働して動作する1つまたは複数のデバイスを実行エンティティと呼ぶことができる。実行エンティティは、空間直交座標系を確立し、直交座標系におけるユーザーの位置情報と仮想環境内の対象オブジェクトの位置情報をリアルタイムで取得し、ユーザーの位置情報と対象オブジェクトの位置情報に基づいて決定を行うことができる。対象物体に対するユーザの相対位置情報。
### 例示的な実施形態による、図2は関連情報生成フローチャート200を示す。情報生成方法は、仮想環境における対象オブジェクトに対するユーザの相対位置情報を取得する動作201##を含む。
### 一実施形態では、互いに協働して動作する1つまたは複数のデバイスを実行エンティティと呼ぶことができる。実行エンティティは、空間直交座標系を確立し、直交座標系におけるユーザーの位置情報と仮想環境内の対象オブジェクトの位置情報をリアルタイムで取得し、ユーザーの位置情報と対象オブジェクトの位置情報に基づいて決定を行うことができる。対象物体に対するユーザの相対位置情報。
#### ステップ202では、対象物の相対位置情報および属性情報に基づいて、対象物体に対応する感覚情報を決定する。
###例示的な実施形態によれば、実行エンティティは、仮想環境内のターゲットオブジェクトに対するユーザの相対位置情報を取得した後、対応テーブルまたは感覚情報に従って、ターゲットオブジェクトに対応する感覚情報をさらに決定することができる。予測モデル。例えば、対応テーブルは、所定の相対位置情報、対象物の属性情報、及び相互に関連する感覚情報を格納することができる。感覚情報予測モデルは、トレーニング演算を実行することによって決定された所定の感覚情報予測モデルであってもよい。例示的な実施形態によれば、対象物体の相対位置情報と感覚情報を伴う属性サンプルを使用してモデルをトレーニングすることができ、それによって感覚情報を予測するモデルを取得することができる
####対象物の感覚情報には、触覚、聴覚、嗅覚、味覚のうちの少なくとも1つが含まれてもよい。感覚情報は刺激パラメータによって表現できます。刺激パラメータは、実際の環境で対象物に対してユーザーが実際に生成した感覚情報に基づいて決定できます
興味深いことに、サムスンは、関連する刺激装置が、脳コンピューターのスタートアップである Blackrock の完全にプログラム可能な 96 チャンネルの神経刺激装置である CereStim である可能性があると提案しました。しかしもちろん、同社は、問題のデバイスは単なるオプションの1つであり、他のエミュレータも可能であると述べています。
シナリオ例では、ユーザーが摂氏 30 度の物体に触れ、ニューラル ポートの神経信号コレクターを使用して電極活動が記録されます。電極によって記録された神経活動は増幅され、30 kHz のサンプリング周波数でアナログ - デジタル (A/D) サンプリングされ、その後ニューラル ポート神経信号プロセッサ NSP システムを使用して記録されます。次に、CereStim の Matlab API を通じて刺激パラメーターが書き込まれ、さまざまなパルス刺激と電流強度の調整を通じて電極信号が再度取得されました。電極信号が互いに無限に近づくと、摂氏 30 度の物体の刺激パラメーターに達する可能性があります。
同様に、触覚、聴覚、嗅覚などのあらゆる刺激パラメータを取得できます。
203 の操作を実行する際、この方法には感覚情報を電気信号に変換し、ブレイン コンピューター インターフェイス デバイスを通じてユーザーを刺激することが含まれます。
ターゲットオブジェクトに対応する感覚情報を決定した後、実行エンティティはブレインコンピュータインターフェースデバイスを使用して感覚情報を電気信号に変換し、ユーザーの大脳皮質の対応する部分を刺激することによって対応する感覚を生み出すことができます。
他の実施形態によれば、対象物の相対位置情報及び属性情報に基づいて対象物に対応する感覚情報を判断するステップは、ユーザの顔の向き及びユーザの頭部と頭部との間の距離に基づいて判断するステップを含むことができる。対象物と、対象物に対応する嗅覚情報と、対象物に対応する感覚情報として嗅覚情報を判定するステップと、を含む。
#### 別の例示的な実施形態によれば、方法は、対象物体が匂い属性を有すると判断するステップと、ユーザの顔の向きおよびユーザの頭と対象物体との間の距離に従って、対象物体に対応する嗅覚情報を判断するステップとを含むことができる。対象物体が臭気属性を有するとの判定に応答して、またはこれに基づいて、対象物体に対応する感覚情報として嗅覚情報が決定される。匂い属性には、果物の香り、花の香り、食べ物の香り、その他の属性情報が含まれます。
### 一実施形態では、対象物体に関連する感覚情報は、対象物体の相対位置情報および属性情報を利用することによって決定される。対象物体が音響属性を有することを確認することに基づいて、ユーザの顔の向きと、ユーザの頭と対象物体との間の距離に基づいて、対象物体に関連する聴覚情報を決定することができ、聴覚情報が得られる。対象物に関連すると判断された感覚情報
実行エンティティは、ユーザーの頭の左側と右側にあるウェアラブル位置決めデバイスを使用して、ユーザーの左右の座標を決定し、さらにユーザーの頭の左右の座標を結ぶ線を決定できます。直線を基準に、面の方向と対象物の座標とのなす角度によってユーザーの顔の向きが決まります。
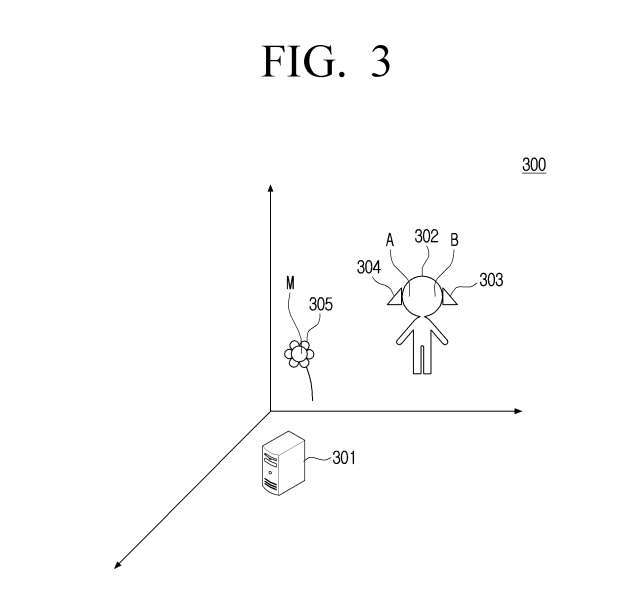 図3に示すように、UWB基地局を原点として使用することにより、実行エンティティ301は空間直交座標系を確立し、ユーザーの頭の左側にある第1のウェアラブル位置決めデバイス303と、第1のウェアラブル位置決めデバイス303を使用することができる。第2のウェアラブル測位デバイス303は、ユーザの頭の右側に配置され、第2のウェアラブル測位デバイス304は、ユーザの頭部に対応する座標AおよびB##を取得する。
###例示的な実施形態によれば、ウェアラブル測位デバイス303および304はUWBチップであってもよい。 UWB基地局は、実行エンティティ301によって実装することができる。座標Aはチップ303、すなわちユーザの頭の左側の座標に対応し、座標Bはチップ304、すなわちユーザの頭の右側の座標に対応する。
図3に示すように、UWB基地局を原点として使用することにより、実行エンティティ301は空間直交座標系を確立し、ユーザーの頭の左側にある第1のウェアラブル位置決めデバイス303と、第1のウェアラブル位置決めデバイス303を使用することができる。第2のウェアラブル測位デバイス303は、ユーザの頭の右側に配置され、第2のウェアラブル測位デバイス304は、ユーザの頭部に対応する座標AおよびB##を取得する。
###例示的な実施形態によれば、ウェアラブル測位デバイス303および304はUWBチップであってもよい。 UWB基地局は、実行エンティティ301によって実装することができる。座標Aはチップ303、すなわちユーザの頭の左側の座標に対応し、座標Bはチップ304、すなわちユーザの頭の右側の座標に対応する。
同時に、対象物体305の座標Mを取得し、直線ABとMが位置する平面の方向とのなす角度をユーザの向きとして求める。ここで、対象オブジェクト305は仮想の花であり、実行主体は、ユーザの顔の向きと、ユーザの頭と対象オブジェクトとの間の距離に応じて、所定の対応テーブルから対象オブジェクトに対応する嗅覚情報を決定し、嗅覚情報は対象物に対応します。対応テーブルには、ユーザーの顔の向き、ユーザーの頭と対象物との距離、および関連する嗅覚情報が記録されます。
#### この実施形態では、ユーザの頭の左側および右側の座標は、ユーザの頭の左側および右側に装着可能な位置決めデバイスを使用することによって決定される。ユーザーの顔の向きは、ユーザーの頭の左右の座標を結んだ直線と、対象物の座標が存在する平面の方向との角度を計算することによって決定される。これにより、ユーザーの顔の向きを決定する精度が効果的に向上します。実行エンティティは、対象物体に対するユーザの頭部の相対位置情報に基づいて、対象物体がユーザの頭の所定の位置に位置し、対象物体が食用の属性を有することを検出し、食用属性を有すると判断することができる。対応する食用属性 対象物に対応する感覚情報としての味覚情報
バナナ味、リンゴ味などの属性情報を含めることができます。
なお、対象物体がユーザの頭部の所定の位置に位置すると判定される前に、ユーザが対象物体に接触する動作が存在する場合もあれば、ユーザの動作が存在しない場合もある。所定の時間範囲内で対象物体に触れること。
### 一実施形態では、ユーザの手と対象オブジェクトとの間の距離が所定の閾値を満たすかどうかを判定することによって、ユーザが仮想オブジェクトに触れる動作があるかどうかを判定することができる。####本実施形態では、まず、ユーザの頭部における対象物の所定の位置とその可食属性に基づいて、可食属性に対応する味覚情報が対象物の感覚情報として決定される。次に、感覚情報は電気信号に変換され、ブレイン コンピューター インターフェイス デバイスを通じて刺激され、ユーザーが仮想環境でオブジェクトの食用特性を体験し、インタラクションの信頼性を高めることができます。
図 4
に示すように、概略図は情報生成方法の適用シナリオを示しています。図 4 に示すアプリケーション シナリオでは、エンティティ 401 は、UWB 基地局を原点とする空間直交座標系を確立できます。ユーザー 402 の 1 つ以上の身体部分にウェアラブル位置決めデバイスを使用することにより、空間直交座標系におけるユーザーの位置情報を取得できます。
たとえば、ウェアラブル位置決めデバイスをユーザーの手や頭に取り付けることができます。 UWB基地局は、実行エンティティ401によって実装することができる。例示的な実施形態によれば、エンティティは、仮想サッカーなどのターゲットオブジェクト403の位置情報を取得し、それによって、ユーザの位置情報およびターゲットの位置情報に基づいて、ターゲットオブジェクトに対するユーザの相対位置を決定することができる。オブジェクトの情報。次に、対応表に基づいて、対象物に対応する感覚情報を決定します。この対応テーブルには、対象物の所定の相対位置情報と属性情報(滑らかさ、柔らかさ等)とそれに対応する感覚情報が記録されている。次に、これらの感覚情報は電気信号に変換され、ブレインコンピュータインターフェースデバイス402
によって刺激されます。 ####情報生成方法は、仮想環境における対象オブジェクトに対するユーザの相対位置情報を取得するステップと、相対位置情報および対象オブジェクトの属性情報に従って対象オブジェクトに対応する感覚情報を決定するステップと、そして、通過するブレイン コンピューター インターフェイス デバイスは、ユーザーを刺激するためにその感覚情報を電気信号に変換します。これにより、ユーザーは仮想環境でオブジェクトの特性を体験し、インタラクションの信頼性が向上します。
情報生成方法のフローチャート500である図5を参照してください。
501 操作では、仮想環境内の対象オブジェクトに対するユーザーの相対位置情報を情報生成メソッド 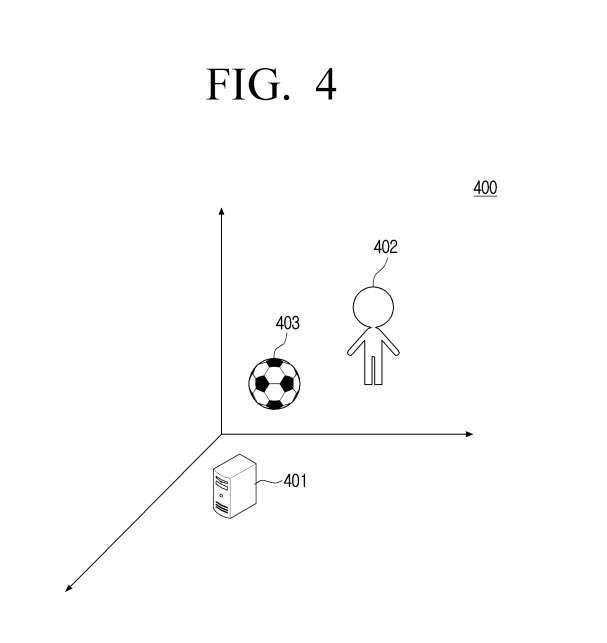 によって取得できます。
によって取得できます。
書き換え内容: 相対位置情報は、ユーザの手と対象物体との間の相対位置情報を含み、実行エンティティは、ユーザの手と対象物体との間の距離を検出してもよい。ユーザの手と対象物との間の距離が所定の閾値を満たし、対象物が輪郭属性を有すると判定されたことに応じて、対象物の輪郭属性に対応する触覚情報が、対象物に対応する感覚情報として決定される#
##プロファイル、材質、質感、滑らかさ、温度、品質、その他の属性情報を含めることができます
その中で、所定のしきい値は、経験、実際のニーズ、および特定のアプリケーション シナリオに基づいて設定できます。例えば、指および/または手のひらと対象物との間の距離が1cm以下、または指および/または手のひらと対象物との間の距離が0.5cm以下であり、これは本開示において限定されない。
具体的には、UWB基地局を原点とした空間直交座標系を構築し、ユーザーの手に装着したデータグローブを利用してユーザーの手の位置情報を取得すると同時に、UWB基地局の位置情報を取得します。ターゲットオブジェクト。対象物は水カップであり、事前に設定されたしきい値は、ユーザーの指および/または手のひらと水カップの間の距離が 1 cm
以下であることです。所定の閾値を満たすために、水カップの輪郭属性、その輪郭属性に対応する触覚情報を考慮しながら、ユーザーの指および/または手のひらと水カップの間の距離が決定されます。水カップは水カップの感覚情報として決定されます
### 動作503において、感覚情報は、ブレインコンピュータインターフェース装置を介して電気信号に変換され、ユーザを刺激する。#### 図2の例示的な実施形態に示される方法と比較すると、図5のフローチャート500に示される方法によれば、ユーザの手と対象物体との間の距離が所定の閾値を満たしているかどうかを判定するために、対象物体は輪郭属性を有しており、対象物の輪郭属性に対応する触覚情報が、対象物体に対応する感覚情報として決定される。
ブレイン・コンピューター・インターフェース・デバイスを通じて、ユーザーが知覚した情報は電気信号に変換され、ユーザーは仮想環境内のオブジェクトの輪郭特性を体験できるように刺激され、インタラクションの信頼性が向上します
詳細資料
:Samsung 特許 | 情報生成方法および装置
「情報生成方法および装置」というタイトルのサムスンの特許出願は、もともと 2023 年 7 月に提出され、最近米国特許商標庁によって公開されました。
通常、米国特許出願は審査後、出願日または優先日から 18 か月以内に自動的に、または出願人の要求に応じて公開されます。特許出願の公開は、特許が付与されたことを意味するものではないことに注意してください。特許出願が公開された後、米国特許商標庁は実体審査を行う必要があり、これには 1 ~ 3 年かかる場合があります。
以上がSamsung XR の特許取得済みの共有ブレイン コンピューター インターフェイスは、匂い、味などの完全な感覚フィードバック刺激を提供します。の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7449
7449
 15
1374
52
77
11
14
6
15
1374
52
77
11
14
6

 投資界隈で人気!ブレイン・コンピュータ・インターフェースは勝てるトラックですか?
Jun 03, 2023 am 10:14 AM
投資界隈で人気!ブレイン・コンピュータ・インターフェースは勝てるトラックですか?
Jun 03, 2023 am 10:14 AM
『星空の下の焼きまんじゅう』『ほうれん草の星空写植』『星空の下のネギ』著者・編集者 「ブレイン・コンピュータ・インターフェース」というSF風味の用語が、最近投資家の間で最もよく使われるホットワードの一つになっています。このようなことができるセクターはありません。指数が 1 日で 8.2% 上昇することはあり得ます。簡単に言えば、ブレイン コンピューター インターフェイスは人間の脳と外部デバイスとの間に直接接続を確立し、人間の脳が機械と「対話」できるようにします。この経路は、中枢神経系の活動を測定および収集し、それを外界が認識できる信号に変換します。最近、中関村フォーラムの「ブレイン・コンピュータ・インターフェース革新開発フォーラム」で、同省の指導者も、我が国は基礎層、技術層、応用層をカバーするブレイン・コンピュータ・インターフェースの完全な産業チェーンを形成したと提案した。医療にも応用されており、
 ブレイン・コンピュータ・インターフェースが現実に光る!工業情報化省は今後、その育成に注力していく予定だが、工業化への道はどこまで進んでいるのか。
Jun 02, 2023 pm 11:34 PM
ブレイン・コンピュータ・インターフェースが現実に光る!工業情報化省は今後、その育成に注力していく予定だが、工業化への道はどこまで進んでいるのか。
Jun 02, 2023 pm 11:34 PM
ブレイン・コンピュータ・インターフェースが現実に光る!工業情報化省は今後、その育成に注力していく予定だが、工業化への道はどこまで進んでいるのか。チャイナ・タイムズ(www.chinatimes.net.cn)の記者チー・メンと張志は、14年前に映画「アバター」が公開され、ファンタジーで魔法のような脳とコンピュータのインターフェースが全編を貫いたと深センから報告した。ブレイン コンピューター インターフェイスは、多くの SF 映画の重要な要素の一部になりました。今、ブレイン・コンピュータ・インターフェースが現実のものになりました。 5月29日、「ブレイン・コンピュータ・インターフェース革新開発フォーラム」で、工業情報化部の主任技術者である趙志国氏は、業界の共同努力により、我が国は完全な産業チェーンを形成したと紹介した。基本層、技術層、応用層をカバーするブレイン・コンピュータ・インターフェースであり、医療、教育、産業、エンターテイメントなどの分野で応用されています。同氏は、工業情報化省はブレイン・コンピューター・インターフェースを将来の開発ツールとして使用すると述べた。
 マスク、ブレイン・コンピューター・インターフェース、最初のツール
Jun 04, 2023 am 09:49 AM
マスク、ブレイン・コンピューター・インターフェース、最初のツール
Jun 04, 2023 am 09:49 AM
「シリコンバレーのアイアンマン」から「リアルなアイアンマン」へ、マスクは「人間トニー・スターク」となり、徐々に現実味を帯びてきている。ほんの数日前、マスク氏のブレイン・コンピューター・インターフェース会社ニューラリンクは大きな進展を発表した。同社は米国食品医薬品局(FDA)から承認を得て、初の人体臨床研究を開始する予定だ。つまり、同社のデバイスは体内に埋め込まれることになる。人間の脳。人間の視力を回復することと、筋肉を動かすことができない人々がスマートフォンなどのデバイスを制御できるようにすることの2つの用途に焦点を当てると報告されている。昨年11月、マスク氏は大胆な声明を発表し、ニューラリンクの最初の人体実験まではまだ約6か月あると述べた。しかしその後、高い安全上のリスク、動物の権利の侵害、危険な病原体の違法輸送の疑いにより...
 ブレイン・コンピュータ・インターフェース産業連合は「ブレイン・コンピュータ・インターフェース+うつ病」に関する学術交流セミナーを成功裡に開催
Sep 20, 2023 pm 09:53 PM
ブレイン・コンピュータ・インターフェース産業連合は「ブレイン・コンピュータ・インターフェース+うつ病」に関する学術交流セミナーを成功裡に開催
Sep 20, 2023 pm 09:53 PM
技術開発の動向を徹底的に調査し、産業発展の方向性を探り、学際的な協力モデルを議論するために、ブレイン・コンピュータ・インターフェース産業同盟は2023年9月11日、「脳」をテーマとした「Bright Stars」の第2期を開催した。 「コンピュータインターフェース+うつ病」イベント学術交流セミナーを開催します。このセミナーは、需要と供給の結びつきと知識の共有を促進し、ブレイン・コンピューター・インターフェース産業の発展をさらに促進することを目的としています。このセミナーは、アライアンスシステムおよび産業アプリケーショングループの会長である周潔氏が主催しました。このセミナーは、ブレイン・コンピュータ・インターフェース産業同盟のメンバーから広く注目を集め、300名近い参加者があり、オンラインでのディスカッションの雰囲気も活発でした。瑞金病院神経調節センターは、「うつ病の神経調節への応用」と題して、「うつ病におけるブレイン・コンピューター・インターフェース」について講演し、脳におけるうつ病の治療について臨床例を通して詳細に紹介した。
 Samsung XR の特許取得済みの共有ブレイン コンピューター インターフェイスは、匂い、味などの完全な感覚フィードバック刺激を提供します。
Nov 27, 2023 pm 12:58 PM
Samsung XR の特許取得済みの共有ブレイン コンピューター インターフェイスは、匂い、味などの完全な感覚フィードバック刺激を提供します。
Nov 27, 2023 pm 12:58 PM
(Nweon 2023 年 11 月 27 日) 以前の情報によると、Samsung は完全なメタバース戦略を策定し、Samsung 中心の XR エコシステムの構築を目指しており、人材を積極的に採用しています。特許出願によると、同社は実際に究極のブレイン・コンピューター・インターフェースを検討しているという。以前は、ブレイン コンピューター インターフェイスの研究は、Meta、Valve、その他の新興企業の間でより一般的でした。もちろん、マイクロソフトのような企業もそれを検討しています。現在、XR 分野に積極的に展開している企業は、より高度なブレイン コンピューター インターフェイスを模索し始めています。 Samsung は、「情報生成方法および装置」というタイトルの特許出願の中で、ブレイン コンピューター インターフェイスを XR 感覚フィードバック刺激の分野に適用することを提案しました。
 ブレイン・コンピュータ・インターフェースに関するビッグニュース、工業情報化省は産業応用を加速することを提案しました!最も有望なコンセプト株は2倍以上に上昇し、これらの株の取引活動は大幅に増加した。
Oct 12, 2023 pm 02:29 PM
ブレイン・コンピュータ・インターフェースに関するビッグニュース、工業情報化省は産業応用を加速することを提案しました!最も有望なコンセプト株は2倍以上に上昇し、これらの株の取引活動は大幅に増加した。
Oct 12, 2023 pm 02:29 PM
データは宝です。書き換えられた内容は次のとおりです。「データの宝は株式市場に投資するための重要なツールです。心配を減らすことができます。ブレイン・コンピューター・インターフェースは破壊的テクノロジーであり、医療、健康、教育、医療の分野で幅広い用途があります。」ゲームとエンターテイメント。産業情報技術省は画期的な提案をしました。ブレイン コンピューター インターフェイスの象徴的な技術製品のバッチ。10 月 11 日、ブレイン コンピューター インターフェイス産業同盟の公式 WeChat アカウントは、「」を実装するために次のように発表しました。 「2023年における将来の産業イノベーション課題の展開・先導業務の組織化及び実施に関する通知」(以下、「展開・先導業務」という。)に基づき、ブレインコンピュータの先導・展開業務の2023年解釈を強化する。今年の将来の産業イノベーション課題におけるインターフェースの方向性について、北京市経済情報局科学技術標準局と工業情報化部科学技術局ハイテク弁公室が方針をまとめた。 10月10日に広報・実装会議を開催し、ブレイン・コンピュータ・インターフェース企業が発表と先行研究を理解し、開発を掌握できるよう支援する
 人気リーダーは5枚連続の盤面を持ち、大幅にボリュームアップしたコンセプト株も多数!ブレイン・コンピューター・インターフェースの新たな進歩
Nov 21, 2023 am 08:57 AM
人気リーダーは5枚連続の盤面を持ち、大幅にボリュームアップしたコンセプト株も多数!ブレイン・コンピューター・インターフェースの新たな進歩
Nov 21, 2023 am 08:57 AM
破壊的テクノロジーとして、ブレインコンピューターインターフェースは、医療分野における病気の治療と機能回復に大きな価値を示しています。ブレイン・コンピュータ・インタフェース製品の第三者評価が正式に開始 ブレイン・コンピュータ・インタフェース産業同盟によると、ブレイン・コンピュータ・インタフェース製品の第三者による評価が正式に開始された。現在、ブレインコンピューターインターフェース技術は医療、教育、ヘルスケア、安全生産、エンターテイメントなどの分野で広く使用されており、業界は急速な発展段階にあります。しかし、ブレインコンピューターインターフェース技術は、さまざまなアプリケーションシナリオで他の技術仕様とどのように組み合わせるか、技術開発と使用をどのように標準化するかなどの課題に依然として直面しています。ブレイン コンピュータ インターフェイス産業および関連作業のニーズに応え、製品の標準化と高品質の開発をさらに促進するために、ブレイン コンピュータ インターフェイス産業同盟と中国情報通信技術院は、幅広い技術的枠組みを組織しました。研究、産業
 財務的態度丨ブレイン・コンピュータ・インターフェースは将来の産業発展にとって重要な方向性となっています!未来にはどんな想像の余地があるでしょうか?専門家による通訳 →
Jun 04, 2023 am 10:43 AM
財務的態度丨ブレイン・コンピュータ・インターフェースは将来の産業発展にとって重要な方向性となっています!未来にはどんな想像の余地があるでしょうか?専門家による通訳 →
Jun 04, 2023 am 10:43 AM
工業情報化部の主任技師である趙志国氏は最近、2023年中関村フォーラムで、産業界の共同努力により、我が国は基礎層、技術層をカバーするブレイン・コンピューター・インターフェースの完全な産業チェーンを形成したと述べた。アプリケーション層とアプリケーション層に分かれており、医療、教育、産業、エンターテインメントなどの分野で開発を行っています。工業情報化部は、ブレイン・コンピュータ・インターフェースを将来の産業発展を促進するための重要な方向とみなし、ブレイン・コンピュータ・インターフェース応用シナリオの探索を強化し、ブレイン・コンピュータ・インターフェース産業の精力的な発展を加速する。ブレイン・コンピュータ・インターフェースとは、一言で言えば、脳と外部機器とを直接接続し、脳の機能を強化、改善、拡張する技術です。このテクノロジーの応用シナリオは何ですか?この点に関して、Economic Voiceの「Financial Attitude」は、浙江大学国際共同ビジネススクールのデジタル経済・金融イノベーション研究センターの共同所長、パン・ヘリン氏にインタビューした。 △5月30日
