

Dyna-Q で Q-Learning を拡張し、意思決定を強化します

Q ラーニングは、特定の状態におけるアクションの値または「Q 値」の学習に焦点を当てた、強化学習における重要なモデルフリー アルゴリズムです。このアプローチは、周囲の環境の事前定義されたモデルを必要としないため、予測不可能な環境でうまく機能します。ランダムな変換やさまざまな報酬に効率的に適応するため、結果が不確実なシナリオに適しています。この柔軟性により、Q-Learning は、環境力学に関する事前知識がなくても適応的な意思決定が必要なアプリケーションにとって強力なツールになります。
Dyna-Q で Q ラーニングを拡張し、意思決定を強化します
Dyna-Q について詳しく見る, これは、現実世界の経験とシミュレートされた計画を組み合わせることによって Q ラーニングを拡張する、高度な強化学習アルゴリズムです。
Q ラーニングは、特定の状態におけるアクションの値または「Q 値」の学習に焦点を当てた、強化学習における重要なモデルフリー アルゴリズムです。このアプローチは、周囲の環境の事前定義されたモデルを必要としないため、予測不可能な環境でうまく機能します。ランダムな変換やさまざまな報酬に効率的に適応するため、結果が不確実なシナリオに適しています。この柔軟性により、Q-Learning は、環境力学に関する事前知識がなくても適応的な意思決定が必要なアプリケーションにとって強力なツールになります。
学習プロセス
Q 学習は、各状態の各アクションの Q 値テーブルを更新することによって機能します。ベルマン方程式を使用して、観察された報酬と将来の報酬の推定に基づいてこれらの値を繰り返し更新します。ポリシー、つまりアクションを選択するための戦略は、これらの Q 値から導出されます。
- Q 値 - 特定の状態で特定のアクションを実行することで得られる将来の報酬を表します。
- 更新ルール - Q 値は次のように更新されます。
- Q (状態、行動) ← Q (状態、行動) α (報酬最大値 γ Q (次の状態、a) − Q (状態、行動))
- 学習率 α は、新しいことの重要性を表します。情報として、割引係数 γ は将来の報酬の重要性を表します。
提供されたコードは、Q-Learner のトレーニング機能として使用されます。ベルマン方程式を利用して、状態間の最も効率的な遷移を決定します。
def train_Q(self,s_prime,r): self.QTable[self.s,self.action] = (1-self.alpha)*self.QTable[self.s, self.action] + \ self.alpha * (r + self.gamma * (self.QTable[s_prime, np.argmax(self.QTable[s_prime])])) self.experiences.append((self.s, self.action, s_prime, r)) self.num_experiences = self.num_experiences + 1 self.s = s_prime self.action = action return action
探索と開発
Q ラーニングの重要な側面は、探索 (報酬を発見するために新しいアクションを試す) と活用 (報酬を最大化するために既知の情報を使用する) のバランスを取ることです。アルゴリズムでは、このバランスを維持するために、ε-greedy などの戦略がよく使用されます。
探索と活用のバランスをとるために、ランダム操作のレートを設定することから始めます。 Q テーブルがより多くのデータを蓄積するにつれて、ランダム性を徐々に減らすために減衰率を実装します。このアプローチにより、時間の経過とともにより多くの証拠が蓄積されるにつれて、アルゴリズムが悪用されるようになっていきます。
if rand.random() >= self.random_action_rate: action = np.argmax(self.QTable[s_prime,:]) #Exploit: Select Action that leads to a State with the Best Reward else: action = rand.randint(0,self.num_actions - 1) #Explore: Randomly select an Action. # Use a decay rate to reduce the randomness (Exploration) as the Q-Table gets more evidence self.random_action_rate = self.random_action_rate * self.random_action_decay_rate
Dyna-Q の紹介
Dyna-Q は、従来の Q ラーニング アルゴリズムの革新的な拡張であり、現実世界の経験とシミュレーションされた計画を組み合わせる最前線にあります。このアプローチは、実際のインタラクションとシミュレートされたエクスペリエンスを統合することで学習プロセスを大幅に強化し、エージェントが複雑な環境に迅速に適応し、情報に基づいた意思決定を行えるようにします。 Dyna-Q は、環境フィードバックとシミュレーションを通じて得られた洞察からの直接学習を活用することで、現実世界のデータが不足している、または取得にコストがかかる場合の課題に対処するための包括的かつ効果的な戦略を提供します。
Dyna-Q的组件
- Q-Learning:从真实经验中学习
- 模型学习:学习环境模型
- 规划:使用模型生成模拟体验
模型学习
- 该模型跟踪转换和奖励。对于每个状态-动作对 (s, a),模型存储下一个状态 s′ 和奖励 r。
- 当智能体观察到转换 (s, a,r,s′) 时,它会更新模型。
使用模拟体验进行规划
- 在每个步骤中,代理从真实体验更新其 Q 值后,还会根据模拟体验更新 Q 值。
- 这些体验是使用学习模型生成的:对于选定的状态-动作对(s,a),它预测下一个状态和奖励,并且Q值被更新,就好像已经经历了这种转变一样。
算法 Dyna-Q
- 初始化所有状态-动作对的 Q 值 Q(s, a) 和模型 (s, a)。
- 循环(每集):
- 初始化状态 s。
- 循环(针对剧集的每个步骤):
- 使用派生自 Q 从状态 s 中选择操作 a(例如,ε-greedy )
- 采取行动 a,观察奖励 r,然后下一个状态 s′
- 直接学习:使用观察到的跃迁(s、a、r、s′)更新 Q 值
- 模型学习:使用转换(s、a、r、s′)更新模型
- 计划:重复 n 次:
- 随机选择以前经历过的状态-动作对 (s, a)。
- 使用模型生成预测的下一个状态 s′ 并奖励 r
- 使用模拟跃迁 (s, a,r,s′) 更新 Q 值
- s← s′。
- 结束循环 此功能将 Dyna-Q 计划阶段合并到前面提到的 Q-Learner 中,从而能够指定在每一集中运行的所需模拟量,其中操作是随机选择的。此功能增强了 Q-Learn 的整体功能和多功能性。
def train_DynaQ(self,s_prime,r): self.QTable[self.s,self.action] = (1-self.alpha)*self.QTable[self.s, self.action] + \ self.alpha * (r + self.gamma * (self.QTable[s_prime, np.argmax(self.QTable[s_prime])])) self.experiences.append((self.s, self.action, s_prime, r)) self.num_experiences = self.num_experiences + 1 # Dyna-Q Planning - Start if self.dyna_planning_steps > 0: # Number of simulations to perform idx_array = np.random.randint(0, self.num_experiences, self.dyna) for exp in range(0, self.dyna): # Pick random experiences and update QTable idx = idx_array[exp] self.QTable[self.experiences[idx][0],self.experiences[idx][1]] = (1-self.alpha)*self.QTable[self.experiences[idx][0], self.experiences[idx][1]] + \ self.alpha * (self.experiences[idx][3] + self.gamma * (self.QTable[self.experiences[idx][2], np.argmax(self.QTable[self.experiences[idx][2],:])])) # Dyna-Q Planning - End if rand.random() >= self.random_action_rate: action = np.argmax(self.QTable[s_prime,:]) #Exploit: Select Action that leads to a State with the Best Reward else: action = rand.randint(0,self.num_actions - 1) #Explore: Randomly select an Action. # Use a decay rate to reduce the randomness (Exploration) as the Q-Table gets more evidence self.random_action_rate = self.random_action_rate * self.random_action_decay_rate self.s = s_prime self.action = action return action
结论
Dyna Q 代表了一种进步,我们追求设计能够在复杂和不确定的环境中学习和适应的代理。通过理解和实施 Dyna Q,人工智能和机器学习领域的专家和爱好者可以为各种实际问题设计出有弹性的解决方案。本教程的目的不是介绍概念和算法,而是在这个引人入胜的研究领域激发创造性应用和未来进展的创造力。
以上がDyna-Q で Q-Learning を拡張し、意思決定を強化しますの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7560
7560
 15
1384
52
84
11
28
98
15
1384
52
84
11
28
98

 カーソルAIでバイブコーディングを試してみましたが、驚くべきことです!
Mar 20, 2025 pm 03:34 PM
カーソルAIでバイブコーディングを試してみましたが、驚くべきことです!
Mar 20, 2025 pm 03:34 PM
バイブコーディングは、無限のコード行の代わりに自然言語を使用してアプリケーションを作成できるようにすることにより、ソフトウェア開発の世界を再構築しています。 Andrej Karpathyのような先見の明に触発されて、この革新的なアプローチは開発を許可します
 2025年2月のトップ5 Genai発売:GPT-4.5、Grok-3など!
Mar 22, 2025 am 10:58 AM
2025年2月のトップ5 Genai発売:GPT-4.5、Grok-3など!
Mar 22, 2025 am 10:58 AM
2025年2月は、生成AIにとってさらにゲームを変える月であり、最も期待されるモデルのアップグレードと画期的な新機能のいくつかをもたらしました。 Xai’s Grok 3とAnthropic's Claude 3.7 SonnetからOpenaiのGまで
 オブジェクト検出にYolo V12を使用する方法は?
Mar 22, 2025 am 11:07 AM
オブジェクト検出にYolo V12を使用する方法は?
Mar 22, 2025 am 11:07 AM
Yolo(あなたは一度だけ見ています)は、前のバージョンで各反復が改善され、主要なリアルタイムオブジェクト検出フレームワークでした。最新バージョンYolo V12は、精度を大幅に向上させる進歩を紹介します
 クリエイティブプロジェクトのための最高のAIアートジェネレーター(無料&有料)
Apr 02, 2025 pm 06:10 PM
クリエイティブプロジェクトのための最高のAIアートジェネレーター(無料&有料)
Apr 02, 2025 pm 06:10 PM
この記事では、トップAIアートジェネレーターをレビューし、その機能、創造的なプロジェクトへの適合性、価値について説明します。 Midjourneyを専門家にとって最高の価値として強調し、高品質でカスタマイズ可能なアートにDall-E 2を推奨しています。
 ChatGpt 4 oは利用できますか?
Mar 28, 2025 pm 05:29 PM
ChatGpt 4 oは利用できますか?
Mar 28, 2025 pm 05:29 PM
CHATGPT 4は現在利用可能で広く使用されており、CHATGPT 3.5のような前任者と比較して、コンテキストを理解し、一貫した応答を生成することに大幅な改善を示しています。将来の開発には、よりパーソナライズされたインターが含まれる場合があります
 chatgptよりも優れたAIはどれですか?
Mar 18, 2025 pm 06:05 PM
chatgptよりも優れたAIはどれですか?
Mar 18, 2025 pm 06:05 PM
この記事では、Lamda、Llama、GrokのようなChatGptを超えるAIモデルについて説明し、正確性、理解、業界への影響における利点を強調しています(159文字)
 次のラグモデルにミストラルOCRを使用する方法
Mar 21, 2025 am 11:11 AM
次のラグモデルにミストラルOCRを使用する方法
Mar 21, 2025 am 11:11 AM
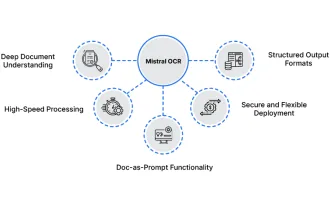
Mistral OCR:マルチモーダルドキュメントの理解により、検索された世代の革命を起こします 検索された生成(RAG)システムはAI機能を大幅に進めており、より多くの情報に基づいた応答のために膨大なデータストアにアクセスできるようになりました
 ベストAIチャットボットが比較されました(chatgpt、gemini、claude& more)
Apr 02, 2025 pm 06:09 PM
ベストAIチャットボットが比較されました(chatgpt、gemini、claude& more)
Apr 02, 2025 pm 06:09 PM
この記事では、ChatGpt、Gemini、ClaudeなどのトップAIチャットボットを比較し、自然言語の処理と信頼性における独自の機能、カスタマイズオプション、パフォーマンスに焦点を当てています。
