

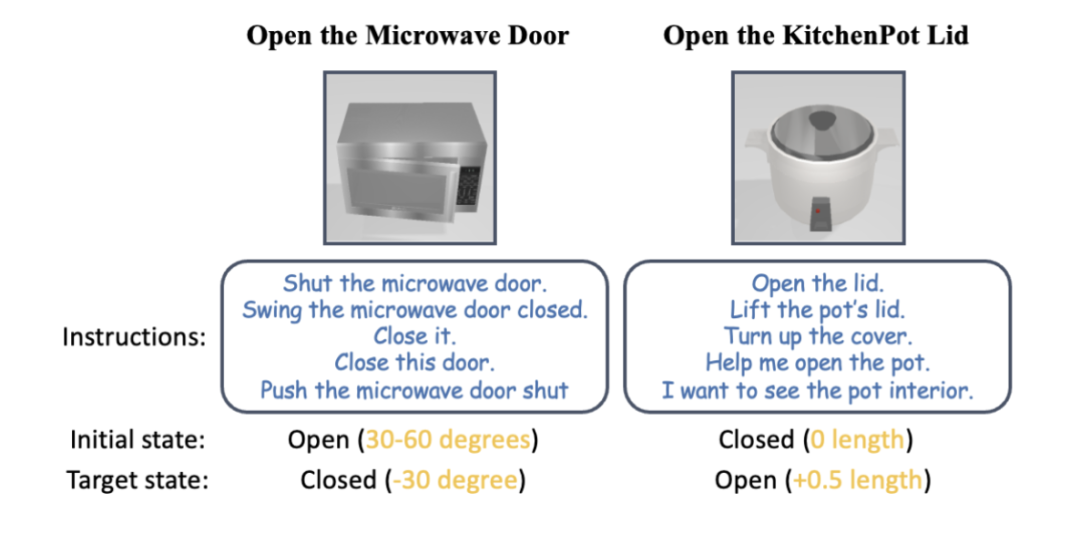
ガイダンスを必要とせず、一般化された視覚化モデルで使用できる、家具および家電製品用の初のユニバーサル 3D グラフィックスおよびテキスト モデル システム

最近では家事はすべてロボットがやってくれます。
スタンフォードからポットが使えるロボットが登場し、コーヒーマシンが使えるロボットも登場しました、Figure-01。

#図-01 デモンストレーション ビデオを見て、コーヒー マシンを上手に操作できるように 10 時間のトレーニングを実施するだけです。コーヒーカプセルの挿入からスタートボタンを押すまで、すべてが一度に完了します。
しかし、ロボットがさまざまな家具や家電製品に出会ったときに、デモンストレーションビデオなしでその使い方を自主的に学習できるようにするのは難しい問題です。そのためには、ロボットには、正確な操作スキルだけでなく、強力な視覚認識と意思決定計画能力も必要です。
論文リンク: https://arxiv.org/abs/2312.01307
プロジェクト ホームページ: https://geometry.stanford.edu/projects/ sage/
コード: https://github.com/geng-haoran/SAGE
研究問題の概要

#図 1: 人間の指示に従って、ロボット アームは指示なしでさまざまな家電製品を使用できます。
最近、PaLM-E と GPT-4V はロボットのタスク計画における大規模なグラフィック モデルの適用を推進しており、視覚言語による汎用ロボット制御が人気の研究分野となっています。
以前は 2 層のシステムを構築するのが一般的で、上位層の大型グラフィック モデルが計画とスキルのスケジューリングを行い、下位層の制御スキル戦略モデルが物理的なアクションの実行を担当します。しかし、ロボットがこれまで見たことのないさまざまな家電製品に直面し、家事において多段階の操作が必要となると、既存の手法の上層部も下層部も無力になってしまいます。
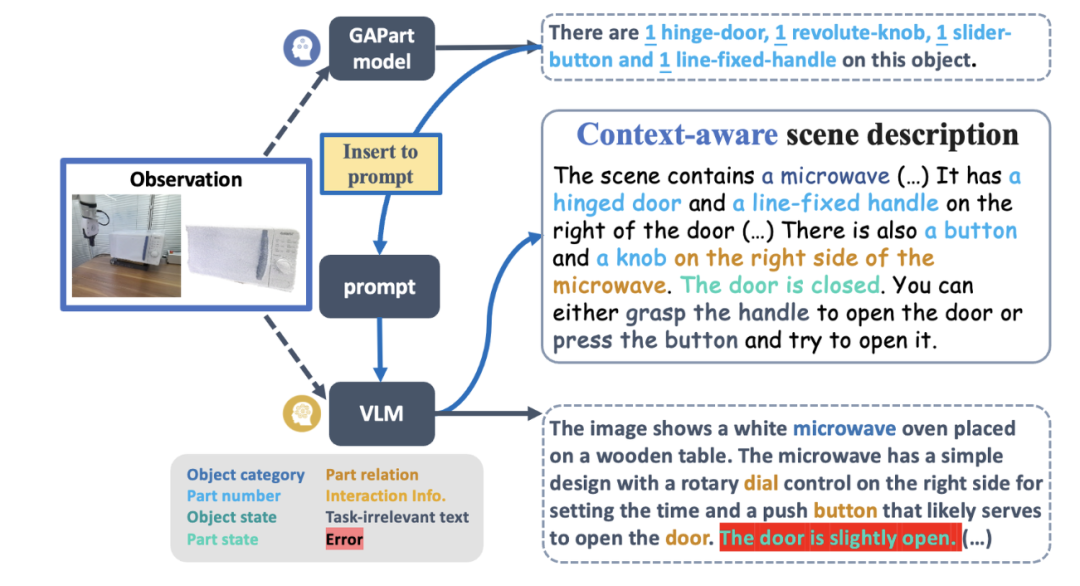
最新鋭のグラフィックモデル GPT-4V を例にとると、1 枚の絵を文字で表現することはできますが、操作可能な部品の検出、カウント、位置決め、状態推定に関しては、まだ完全な機能を備えています。間違いの。図 2 の赤いハイライトは、タンス、オーブン、およびスタンディング キャビネットの写真を記述する際に GPT-4V が犯したさまざまなエラーです。誤った説明に基づくと、ロボットのスキルのスケジュール設定は明らかに信頼できません。

#図 2: GPT-4V はカウント、検出などをあまり処理しません##まあ #位置決め、状態推定、およびその他の汎用制御に重点を置いたタスク。 下位レベルの制御スキル戦略モデルは、さまざまな実際の状況において、上位レベルのグラフィックおよびテキスト モデルによって与えられたタスクを実行する責任を負います。既存の研究成果の多くは、既知の物体の把持点や操作方法をルールに基づいて厳密にコード化したものであり、これまでに見たことのない新たな物体カテゴリーには一般的に対応できていない。ただし、エンドツーエンドの操作モデル (RT-1、RT-2 など) は RGB モダリティのみを使用し、距離の正確な認識に欠け、高さなどの新しい環境の変化に対する一般化が不十分です。
Wang He 教授のチームによる以前の CVPR ハイライト作品 GAPartNet [1] に触発されて、研究チームはさまざまなカテゴリの家電製品の共通部品 (GAPart) に焦点を当てました。家電製品は常に変化していますが、不可欠な部品は常にいくつかあり、各家電製品とこれらの共通部品の間には、同様の形状と相互作用パターンがあります。
その結果、研究チームは論文 GAPartNet [1] で GAPart の概念を導入しました。 GAPart は、一般化可能な対話型コンポーネントを指します。 GAPart は、さまざまなカテゴリのヒンジ付きオブジェクトに表示されます。たとえば、開き戸は、金庫、ワードローブ、冷蔵庫に見られます。図 3 に示すように、GAPartNet [1] は、さまざまなタイプのオブジェクトの GAPart のセマンティクスとポーズに注釈を付けます。

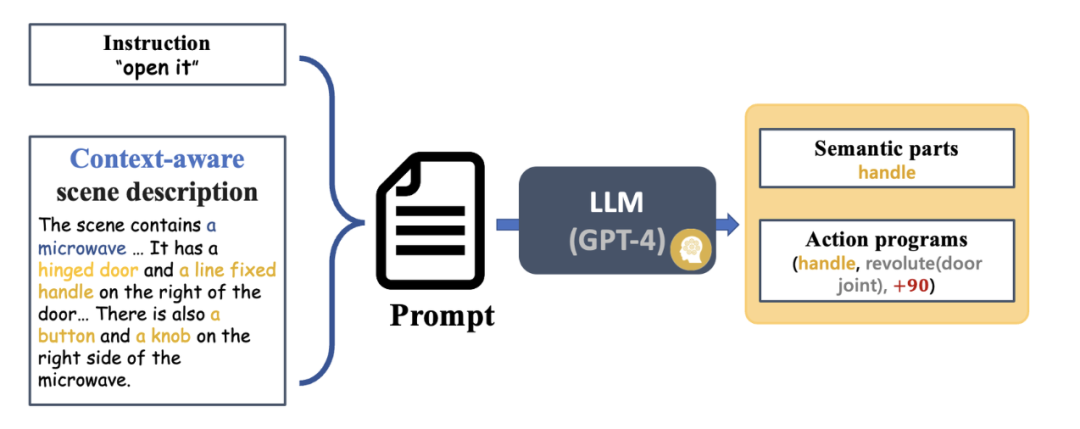
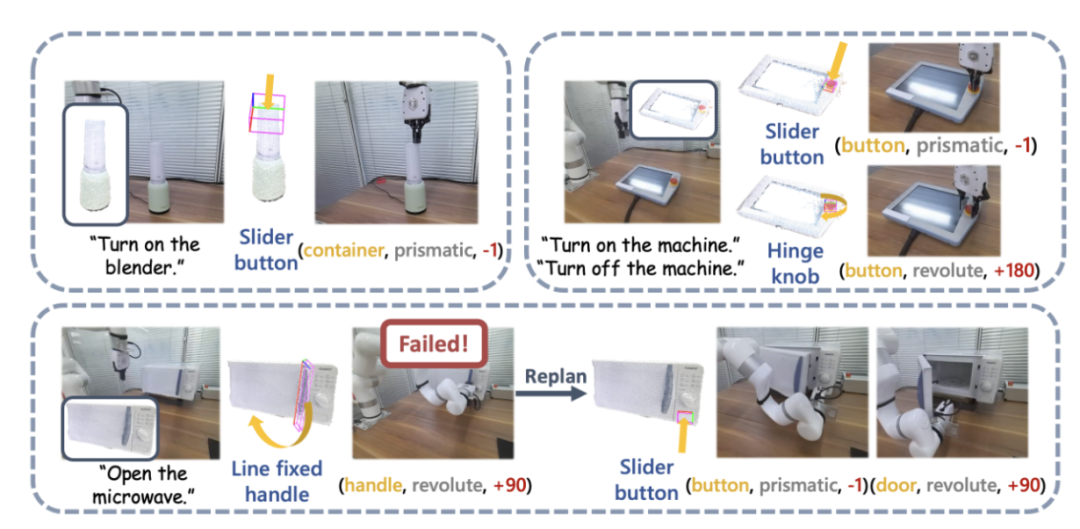
図 3: GAPart: 一般化可能な対話型コンポーネント [1]。 先行研究に基づいて、研究チームは、3次元視覚に基づくGAPartをロボットの物体操作システムSAGEに創造的に導入しました。 SAGE は、一般化可能な 3D パーツ検出と正確な姿勢推定を通じて、VLM と LLM に情報を提供します。この新手法は、意思決定レベルでは、2次元グラフィックモデルの正確な計算と推論能力が不十分であるという問題を解決し、実行レベルでは、新手法は、 GAパーツのポーズ。 SAGE は、初の三次元具現化グラフィックとテキストの大規模モデル システムを構成し、知覚、物理的相互作用からフィードバックに至るロボットのリンク全体に新しいアイデアを提供し、ロボットが家具や家具をインテリジェントかつユニバーサルに制御できるようにします。家電製品など。複雑なオブジェクトが可能なパスを探索します。 システムの紹介 図 4 は、SAGE の基本プロセスを示しています。まず、コンテキストを解釈できる命令解釈モジュールが、ロボットに入力された命令とその観察結果を解析し、これらの解析結果を次のロボットの動作プログラムとそれに関連する意味部分に変換します。次に、SAGE はセマンティック部分 (コンテナなど) を操作する必要がある部分 (スライダー ボタンなど) にマッピングし、タスクを完了するためのアクション (ボタンの「押す」アクションなど) を生成します。 # 図 4: メソッドの概要。 概要SAGE は、家具や家具などの複雑な関節オブジェクトに対する一般的な操作命令を生成できる初の 3 次元視覚言語モデル フレームワークです。家電。オブジェクトのセマンティクスと操作性の理解を部品レベルで結びつけることにより、言語で指示されたアクションを実行可能な操作に変換します。 さらに、この記事では、一般的な大規模な視覚/言語モデルとドメイン エキスパート モデルを組み合わせて、ネットワーク予測の包括性と正確性を強化する方法についても研究しています。これらのタスクを適切に処理して、最先端のパフォーマンスを実現します。実験結果は、このフレームワークが強力な一般化機能を備えており、さまざまなオブジェクト カテゴリやタスクで優れたパフォーマンスを実証できることを示しています。さらに、この記事は、多関節オブジェクトの言語ガイドによる操作の新しいベンチマークを提供します。 SAGE この研究結果は、スタンフォード大学のレオニダス・ギバス教授の研究室、スタンフォード大学のワン・ヘ教授の身体的知覚および相互作用(EPIC研究室)から得られたものです。北京大学および知能知能研究所出典人工知能研究所。論文の著者は北京大学の学生でスタンフォード大学客員研究員の耿浩然氏(共著者)、北京大学博士課程の学生魏松林氏(共著者)、スタンフォード大学博士課程の学生鄧相悦氏と沈博毅氏、監修者はレオニダス教授です。ギバスと王鶴教授。
[1] Haoran Geng、Helin Xu、Chengyang Zhao、Chao Xu、Li Yi 、黄思源と王何。 Gapartnet: 一般化可能で実行可能な部分を介した、カテゴリを超えたドメインの一般化可能なオブジェクトの認識と操作。 arXiv プレプリント arXiv:2211.05272、2022。 [2] Kirillov、Alexander、Eric Mintun、Nikhila Ravi、Hanzi Mao、Chloe Rolland、Laura Gustafson、Tete Xiao他。 「何でもセグメント化します。」 arXiv プレプリント arXiv:2304.02643 (2023). [3] チャン、ハオ、フェン リー、シロン リウ、レイ チャン、ハン スー、ジュン ジュー、ライオネル M.ニーさんとフンヨン・シュムさん。 「Dino: エンドツーエンドの物体検出のための改善されたノイズ除去アンカー ボックスを備えた Detr。」 arXiv プレプリント arXiv:2203.03605 (2022). [4] Xiang 、ファンボ、Yuzhe Qin、Kaichun Mo、Yikuan Xia、Hao Zhu、Fangchen Liu、Minghua Liu 他。 「Sapien: シミュレートされたパーツベースのインタラクティブ環境」。コンピュータ ビジョンとパターン認識に関する IEEE/CVF 会議議事録、pp. 11097-11107.2020.
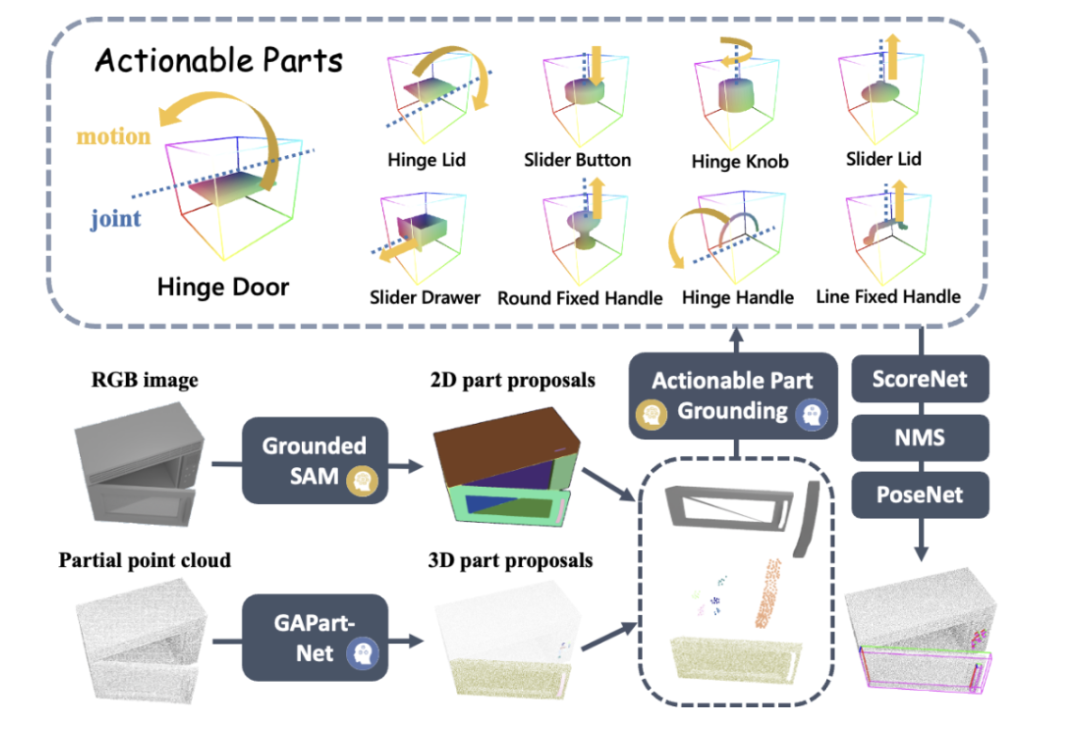
観測値を入力するプロセスで、SAGE は、GroundedSAM からの 2 次元 (2D) キューと GAPartNet からの 3 次元 (3D) キューを組み合わせます。これらの手がかりは、操作可能な部分の特定の位置決めとして使用されます。研究チームは、ScoreNet、非最大抑制 (NMS)、および PoseNet を使用して、新しい方法の知覚結果を実証しました。
その中には: (1) 部分を意識した評価ベンチマークについては、この記事では SAM [2] を直接使用しています。ただし、操作フローでは、この記事では、セマンティック部分も入力として考慮される、GroundedSAM を使用します。 (2) ラージ言語モデル (LLM) が操作可能な部分のターゲットを直接出力する場合、位置決めプロセスはバイパスされます。 
#アクション生成
インタラクティブなフィードバック
 チーム紹介
チーム紹介
以上がガイダンスを必要とせず、一般化された視覚化モデルで使用できる、家具および家電製品用の初のユニバーサル 3D グラフィックスおよびテキスト モデル システムの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7569
7569
 15
1386
52
87
11
28
107
15
1386
52
87
11
28
107

 ControlNet の作者がまたヒット作を出しました!写真から絵画を生成し、2 日間で 1.4,000 個のスターを獲得する全プロセス
Jul 17, 2024 am 01:56 AM
ControlNet の作者がまたヒット作を出しました!写真から絵画を生成し、2 日間で 1.4,000 個のスターを獲得する全プロセス
Jul 17, 2024 am 01:56 AM
これも Tusheng のビデオですが、PaintsUndo は別の道を歩んでいます。 ControlNet 作者 LvminZhang が再び生き始めました!今回は絵画の分野を目指します。新しいプロジェクト PaintsUndo は、開始されて間もなく 1.4kstar を獲得しました (まだ異常なほど上昇しています)。プロジェクトアドレス: https://github.com/lllyasviel/Paints-UNDO このプロジェクトを通じて、ユーザーが静止画像を入力すると、PaintsUndo が線画から完成品までのペイントプロセス全体のビデオを自動的に生成するのに役立ちます。 。描画プロセス中の線の変化は驚くべきもので、最終的なビデオ結果は元の画像と非常によく似ています。完成した描画を見てみましょう。
 オープンソース AI ソフトウェア エンジニアのリストのトップに立つ UIUC のエージェントレス ソリューションは、SWE ベンチの実際のプログラミングの問題を簡単に解決します
Jul 17, 2024 pm 10:02 PM
オープンソース AI ソフトウェア エンジニアのリストのトップに立つ UIUC のエージェントレス ソリューションは、SWE ベンチの実際のプログラミングの問題を簡単に解決します
Jul 17, 2024 pm 10:02 PM
AIxivコラムは、当サイトが学術的・技術的な内容を掲載するコラムです。過去数年間で、このサイトの AIxiv コラムには 2,000 件を超えるレポートが寄せられ、世界中の主要な大学や企業のトップ研究室がカバーされ、学術交流と普及を効果的に促進しています。共有したい優れた作品がある場合は、お気軽に寄稿するか、報告のために当社までご連絡ください。提出電子メール: liyazhou@jiqizhixin.com; zhaoyunfeng@jiqizhixin.com この論文の著者は全員、イリノイ大学アーバナ シャンペーン校 (UIUC) の Zhang Lingming 教師のチームのメンバーです。博士課程4年、研究者
 OpenAI Super Alignment チームの遺作: 2 つの大きなモデルがゲームをプレイし、出力がより理解しやすくなる
Jul 19, 2024 am 01:29 AM
OpenAI Super Alignment チームの遺作: 2 つの大きなモデルがゲームをプレイし、出力がより理解しやすくなる
Jul 19, 2024 am 01:29 AM
AIモデルによって与えられた答えがまったく理解できない場合、あなたはそれをあえて使用しますか?機械学習システムがより重要な分野で使用されるにつれて、なぜその出力を信頼できるのか、またどのような場合に信頼してはいけないのかを実証することがますます重要になっています。複雑なシステムの出力に対する信頼を得る方法の 1 つは、人間または他の信頼できるシステムが読み取れる、つまり、考えられるエラーが発生する可能性がある点まで完全に理解できる、その出力の解釈を生成することをシステムに要求することです。見つかった。たとえば、司法制度に対する信頼を築くために、裁判所に対し、決定を説明し裏付ける明確で読みやすい書面による意見を提供することを求めています。大規模な言語モデルの場合も、同様のアプローチを採用できます。ただし、このアプローチを採用する場合は、言語モデルが
 RLHF から DPO、TDPO に至るまで、大規模なモデル アライメント アルゴリズムはすでに「トークンレベル」になっています
Jun 24, 2024 pm 03:04 PM
RLHF から DPO、TDPO に至るまで、大規模なモデル アライメント アルゴリズムはすでに「トークンレベル」になっています
Jun 24, 2024 pm 03:04 PM
AIxivコラムは、当サイトが学術的・技術的な内容を掲載するコラムです。過去数年間で、このサイトの AIxiv コラムには 2,000 件を超えるレポートが寄せられ、世界中の主要な大学や企業のトップ研究室がカバーされ、学術交流と普及を効果的に促進しています。共有したい優れた作品がある場合は、お気軽に寄稿するか、報告のために当社までご連絡ください。提出メール: liyazhou@jiqizhixin.com; zhaoyunfeng@jiqizhixin.com 人工知能の開発プロセスにおいて、大規模言語モデル (LLM) の制御とガイダンスは常に中心的な課題の 1 つであり、これらのモデルが両方とも確実に機能することを目指しています。強力かつ安全に人類社会に貢献します。初期の取り組みは人間のフィードバックによる強化学習手法に焦点を当てていました (RL
 arXiv 論文は「弾幕」として投稿可能、スタンフォード alphaXiv ディスカッション プラットフォームはオンライン、LeCun は気に入っています
Aug 01, 2024 pm 05:18 PM
arXiv 論文は「弾幕」として投稿可能、スタンフォード alphaXiv ディスカッション プラットフォームはオンライン、LeCun は気に入っています
Aug 01, 2024 pm 05:18 PM
乾杯!紙面でのディスカッションが言葉だけになると、どんな感じになるでしょうか?最近、スタンフォード大学の学生が、arXiv 論文のオープン ディスカッション フォーラムである alphaXiv を作成しました。このフォーラムでは、arXiv 論文に直接質問やコメントを投稿できます。 Web サイトのリンク: https://alphaxiv.org/ 実際、URL の arXiv を alphaXiv に変更するだけで、alphaXiv フォーラムの対応する論文を直接開くことができます。この Web サイトにアクセスする必要はありません。その中の段落を正確に見つけることができます。論文、文: 右側のディスカッション エリアでは、ユーザーは論文のアイデアや詳細について著者に尋ねる質問を投稿できます。たとえば、次のような論文の内容についてコメントすることもできます。
 リーマン予想の大きな進歩!陶哲軒氏はMITとオックスフォードの新しい論文を強く推薦し、37歳のフィールズ賞受賞者も参加した
Aug 05, 2024 pm 03:32 PM
リーマン予想の大きな進歩!陶哲軒氏はMITとオックスフォードの新しい論文を強く推薦し、37歳のフィールズ賞受賞者も参加した
Aug 05, 2024 pm 03:32 PM
最近、2000年代の7大問題の一つとして知られるリーマン予想が新たなブレークスルーを達成した。リーマン予想は、数学における非常に重要な未解決の問題であり、素数の分布の正確な性質に関連しています (素数とは、1 とそれ自身でのみ割り切れる数であり、整数論において基本的な役割を果たします)。今日の数学文献には、リーマン予想 (またはその一般化された形式) の確立に基づいた 1,000 を超える数学的命題があります。言い換えれば、リーマン予想とその一般化された形式が証明されれば、これらの 1,000 を超える命題が定理として確立され、数学の分野に重大な影響を与えることになります。これらの命題の一部も有効性を失います。 MIT数学教授ラリー・ガスとオックスフォード大学から新たな進歩がもたらされる
 最初の Mamba ベースの MLLM が登場しました!モデルの重み、トレーニング コードなどはすべてオープンソースです
Jul 17, 2024 am 02:46 AM
最初の Mamba ベースの MLLM が登場しました!モデルの重み、トレーニング コードなどはすべてオープンソースです
Jul 17, 2024 am 02:46 AM
AIxivコラムは、当サイトが学術的・技術的な内容を掲載するコラムです。過去数年間で、このサイトの AIxiv コラムには 2,000 件を超えるレポートが寄せられ、世界中の主要な大学や企業のトップ研究室がカバーされ、学術交流と普及を効果的に促進しています。共有したい優れた作品がある場合は、お気軽に寄稿するか、報告のために当社までご連絡ください。提出電子メール: liyazhou@jiqizhixin.com; zhaoyunfeng@jiqizhixin.com。はじめに 近年、さまざまな分野でマルチモーダル大規模言語モデル (MLLM) の適用が目覚ましい成功を収めています。ただし、多くの下流タスクの基本モデルとして、現在の MLLM はよく知られた Transformer ネットワークで構成されています。
 公理的トレーニングにより、LLM は因果推論を学習できます。6,700 万個のパラメータ モデルは、1 兆個のパラメータ レベル GPT-4 に匹敵します。
Jul 17, 2024 am 10:14 AM
公理的トレーニングにより、LLM は因果推論を学習できます。6,700 万個のパラメータ モデルは、1 兆個のパラメータ レベル GPT-4 に匹敵します。
Jul 17, 2024 am 10:14 AM
LLM に因果連鎖を示すと、LLM は公理を学習します。 AI はすでに数学者や科学者の研究を支援しています。たとえば、有名な数学者のテレンス タオは、GPT などの AI ツールを活用した研究や探索の経験を繰り返し共有しています。 AI がこれらの分野で競争するには、強力で信頼性の高い因果推論能力が不可欠です。この記事で紹介する研究では、小さなグラフでの因果的推移性公理の実証でトレーニングされた Transformer モデルが、大きなグラフでの推移性公理に一般化できることがわかりました。言い換えれば、Transformer が単純な因果推論の実行を学習すると、より複雑な因果推論に使用できる可能性があります。チームが提案した公理的トレーニング フレームワークは、デモンストレーションのみで受動的データに基づいて因果推論を学習するための新しいパラダイムです。
