

Google、人間を危害から守るための「人工知能マシンの行動規範」を開発

IT House は 1 月 5 日、Google の子会社である DeepMind が最近 3 つの新しい開発を発表したと報じました。 そのうちの 1 つは、AI ロボットが危害を及ぼさないように訓練データを収集するシステムに関する「ロボット憲法」を草案しました。人類。

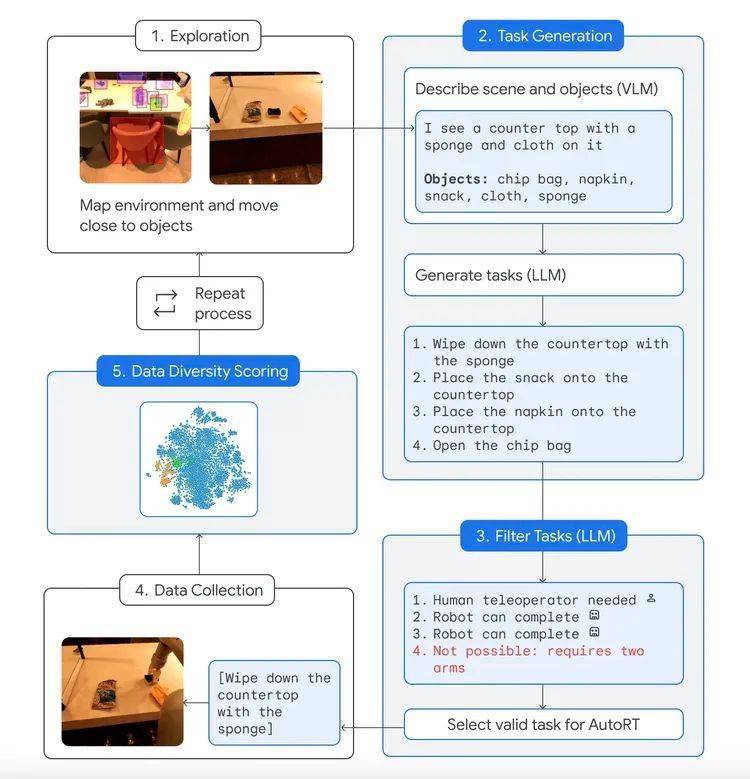
Google のデータ収集システムである AutoRT は、ビジュアル言語モデル (VLM) と大規模言語モデル (LLM) を活用して、環境に適応し、環境を理解し、タスクを決定します。
今回策定された「ロボット憲法」は、アイザック・アシモフの「ロボット三原則」にインスピレーションを受け、安全性を重視したものとなっている。憲法は、LLM に対し、人間、動物、鋭利な物体、さらには電気製品に関わる作業を避けるよう指示しています。
DeepMindは、安全性を向上させるためにロボットの関節は制限されており、力が閾値を超えると自動的に停止し、物理的な緊急停止スイッチが装備されていると述べました。
Google は、過去 7 か月間に 53 台の AutoRT ロボットを導入したと発表しました。ロボットは 4 つの異なるオフィスビルに導入され、77,000 回以上の試験が実施されました。
一部のロボットは人間のオペレーターによって遠隔制御されますが、他のロボットはスクリプトに従って動作するか、Google の RT-2 人工知能学習モデルを使用して完全に自律的に動作します。
試験で使用されたロボットは、カメラ、ロボット アーム、移動ベースのみを備えた、ギミックというより実用的なものに見えました。各ロボットについて、システムは VLM を使用してその環境とその視野内のオブジェクトを理解します。次に、LLM は、カウンタートップにスナックを置くなど、ロボットが実行できる創造的なタスクのリストを作成し、ロボットが実行する適切なタスクを選択する意思決定者の役割を果たしました。
IT House によると、DeepMind のもう 1 つの新技術である SARA-RT は、既存の Robotic Transformer RT-2 よりも正確で高速なニューラル ネットワーク アーキテクチャを備えていることが判明しました。
Google はまた、ロボットがテーブルを拭くなどの特定の物理的タスクをより効率的に実行できるように 2D 輪郭を追加する RT-Trajectory も発表しました。
以上がGoogle、人間を危害から守るための「人工知能マシンの行動規範」を開発の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7562
7562
 15
1384
52
84
11
28
99
15
1384
52
84
11
28
99

 カーソルAIでバイブコーディングを試してみましたが、驚くべきことです!
Mar 20, 2025 pm 03:34 PM
カーソルAIでバイブコーディングを試してみましたが、驚くべきことです!
Mar 20, 2025 pm 03:34 PM
バイブコーディングは、無限のコード行の代わりに自然言語を使用してアプリケーションを作成できるようにすることにより、ソフトウェア開発の世界を再構築しています。 Andrej Karpathyのような先見の明に触発されて、この革新的なアプローチは開発を許可します
 2025年2月のトップ5 Genai発売:GPT-4.5、Grok-3など!
Mar 22, 2025 am 10:58 AM
2025年2月のトップ5 Genai発売:GPT-4.5、Grok-3など!
Mar 22, 2025 am 10:58 AM
2025年2月は、生成AIにとってさらにゲームを変える月であり、最も期待されるモデルのアップグレードと画期的な新機能のいくつかをもたらしました。 Xai’s Grok 3とAnthropic's Claude 3.7 SonnetからOpenaiのGまで
 オブジェクト検出にYolo V12を使用する方法は?
Mar 22, 2025 am 11:07 AM
オブジェクト検出にYolo V12を使用する方法は?
Mar 22, 2025 am 11:07 AM
Yolo(あなたは一度だけ見ています)は、前のバージョンで各反復が改善され、主要なリアルタイムオブジェクト検出フレームワークでした。最新バージョンYolo V12は、精度を大幅に向上させる進歩を紹介します
 クリエイティブプロジェクトのための最高のAIアートジェネレーター(無料&有料)
Apr 02, 2025 pm 06:10 PM
クリエイティブプロジェクトのための最高のAIアートジェネレーター(無料&有料)
Apr 02, 2025 pm 06:10 PM
この記事では、トップAIアートジェネレーターをレビューし、その機能、創造的なプロジェクトへの適合性、価値について説明します。 Midjourneyを専門家にとって最高の価値として強調し、高品質でカスタマイズ可能なアートにDall-E 2を推奨しています。
 ChatGpt 4 oは利用できますか?
Mar 28, 2025 pm 05:29 PM
ChatGpt 4 oは利用できますか?
Mar 28, 2025 pm 05:29 PM
CHATGPT 4は現在利用可能で広く使用されており、CHATGPT 3.5のような前任者と比較して、コンテキストを理解し、一貫した応答を生成することに大幅な改善を示しています。将来の開発には、よりパーソナライズされたインターが含まれる場合があります
 ベストAIチャットボットが比較されました(chatgpt、gemini、claude& more)
Apr 02, 2025 pm 06:09 PM
ベストAIチャットボットが比較されました(chatgpt、gemini、claude& more)
Apr 02, 2025 pm 06:09 PM
この記事では、ChatGpt、Gemini、ClaudeなどのトップAIチャットボットを比較し、自然言語の処理と信頼性における独自の機能、カスタマイズオプション、パフォーマンスに焦点を当てています。
 次のラグモデルにミストラルOCRを使用する方法
Mar 21, 2025 am 11:11 AM
次のラグモデルにミストラルOCRを使用する方法
Mar 21, 2025 am 11:11 AM
Mistral OCR:マルチモーダルドキュメントの理解により、検索された世代の革命を起こします 検索された生成(RAG)システムはAI機能を大幅に進めており、より多くの情報に基づいた応答のために膨大なデータストアにアクセスできるようになりました
 トップAIライティングアシスタントは、コンテンツの作成を後押しします
Apr 02, 2025 pm 06:11 PM
トップAIライティングアシスタントは、コンテンツの作成を後押しします
Apr 02, 2025 pm 06:11 PM
この記事では、Grammarly、Jasper、Copy.ai、Writesonic、RytrなどのトップAIライティングアシスタントについて説明し、コンテンツ作成のためのユニークな機能に焦点を当てています。 JasperがSEOの最適化に優れているのに対し、AIツールはトーンの維持に役立つと主張します
