

業界標準、トレンド評価、システム導入を統合した自動駐車に関する一般的な調査

前書き
自動駐車システムとは、車両が自ら駐車スペースを見つけ、人手を介さずに正確に駐車できるシステムであり、ユーザーのニーズに応じて駐車することもできます。要件が指定された場所に移動されます。この技術の成熟により、駐車スペースを探す際に発生する車両の衝突や摩擦などの安全上の問題だけでなく、長時間駐車スペースを探す無駄な時間など、駐車プロセスにおける人々の不便さも大幅に軽減されるでしょう。
現在、多くのテクノロジー企業や大学研究室が自動駐車の分野を研究しています。メルセデス・ベンツやボッシュなどの企業は駐車インフラを確立しており、NVIDIA は自動運転アルゴリズムと駐車場用の駐車スペース検出方法を開発しており、BMW も量産車に自動駐車モジュールを搭載しています。
自動駐車技術に対する業界の広範な需要を考慮して、私たちは自動駐車システムの開発状況について体系的な調査を実施しました。自動駐車システムの業界標準動向、性能評価指標、自動駐車システムの各サブモジュールに組み込まれた技術などが含まれます。
自動駐車業界の現在の標準動向
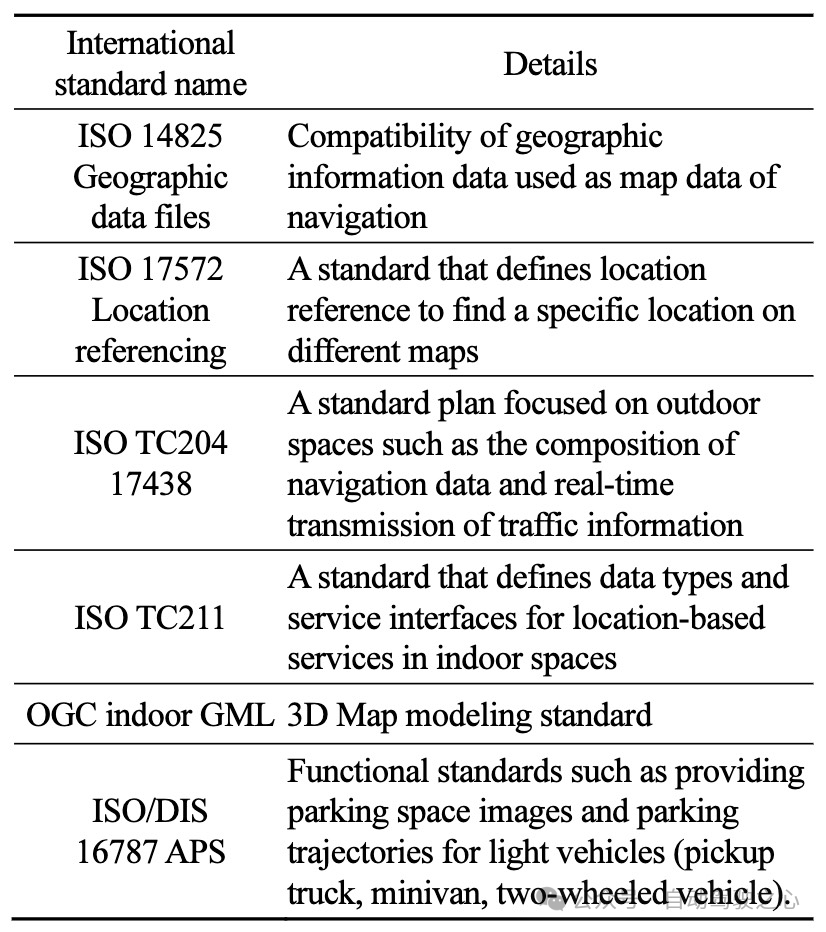
現在の自動駐車システムは産学界から広く注目されており、様々な国や企業が自動駐車の開発を続けています。テクノロジー。したがって、自動駐車技術に関する規格の策定は特に重要です。開発された技術標準には、地理情報、屋外測位、屋内空間測位、駐車標準、車両通信が含まれます。標準 コンテンツのいくつかの側面、特定の標準を次の表にまとめます。
自動駐車業界の関連基準
- 地理情報と位置基準により、屋外スペースの命名、定義、形式の原則と基礎が確立されます。 , このような規格には、ISO 14825、ISO 17572、ISO TC204 177438などが含まれます。
- ISO TC211 や OGC 標準など、屋内空間の測位の標準化も策定されています。
- ISO/DIS 16787 APS 駐車規格は、駐車に必要な情報の種類を提案し、車両を制御するための技術名を定義します。さらに、この規格では、駐車支援システムを実装し、車両のステアリング制御機能を実行するために必要な機能も定義されています。
自動駐車システムの評価基準
現在の自動駐車システムの評価は、自動運転部分の評価# #の2つの部分から構成されています。 # と 自動駐車部分のレビュー。
自動運転部品の評価基準
自動運転技術の評価は、自動運転技術と自動運転技術を組み合わせた自動車工学会が策定した「自動運転技術ステージ」の基準に準拠します。運転技術 技術レベル、制御対象、運転能力に応じて6つのレベルに分かれています。各レベルの評価を容易にするために、開発中の ISO/WD 34501 および ISO/WD 34502 規格が提案されました。 ISO/WD 34501 規格はレベル 3 システムのテスト シナリオの用語と定義に適用され、ISO/WD 34502 規格はテスト シナリオと安全性評価プロセスに関するガイダンスを提供します。この規格の策定は、自動運転技術の開発・応用における統一的な評価基準を定め、自動運転技術の開発を促進することを目的としています。自動駐車部分の評価基準
現在、自動駐車技術が注目を集めていますが、国際規格の策定はまだ初期段階です。自動運転の評価基準とは異なり、自動駐車の技術レベルは主に開発者の評価基準によって測られます。 次の表は、交通状況シナリオ システムにおける自動駐車シナリオの例を示しており、駐車シナリオはパフォーマンス レベルに応じて分類されています。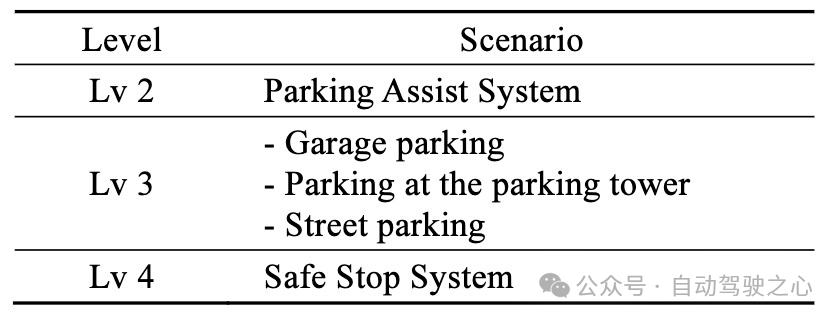
- 第 2 レベル (Lv2): 駐車支援システムと呼ばれ、人々がより便利に駐車できるようにするために使用されます。 Lv2 レベルでは、通常、車両には障害物距離警告システムとバックビューカメラが装備されています。
- 第 3 レベル (Lv3): Lv3 レベルでは、指定されたシナリオでの自動駐車を実現できます。たとえば、ガレージに駐車するなどの単純な駐車シナリオです。
- 第 4 レベル (Lv4): Lv3 レベルのすべてのシーンを Lv4 レベルで実行できます。また、車両が障害物に遭遇した場合には、停止または障害物を回避して目的地に戻ることができる。
自動駐車システムの詳細説明
自動駐車システムは現在、主に下図の 3 つの部分で構成されています運転プロセス 、自動駐車プロセス 、および 運転プロセスに戻る を検索します。まず各プロセスの概要を説明し、次に各プロセスの現在の開発傾向を紹介します。
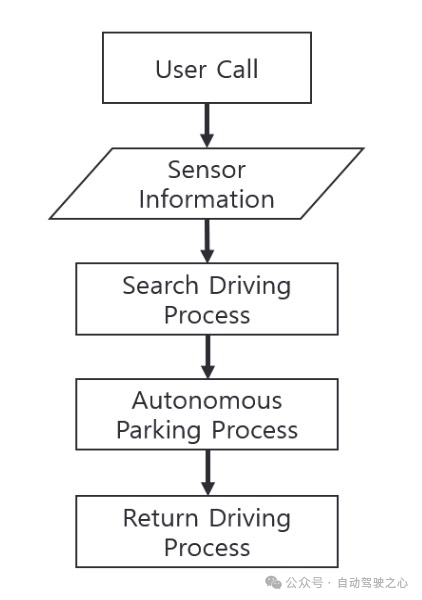
自動駐車システムのワークフロー
探索走行プロセス
探索走行プロセスの最終目標は、駐車場内 車は独自に駐車スペースを見つけることができるため、そのプロセスには 位置決め 、衝突防止 、および 駐車スペース検出テクノロジー が必要です。
測位技術のご紹介
自動駐車システムでは、車両に搭載されているGPSやIMUセンサーを利用して位置を確認することができます。車両の速度と姿勢を測定し、車両の位置推定誤差を修正します。ただし、屋内などの一部のシーンではGPS信号を受信できない場合があります。そのため、自動運転車には支援用のカメラ、ライダー、ミリ波レーダーを搭載する必要がある。下の写真は車両に搭載されているセンサー情報の一部を紹介したものです。
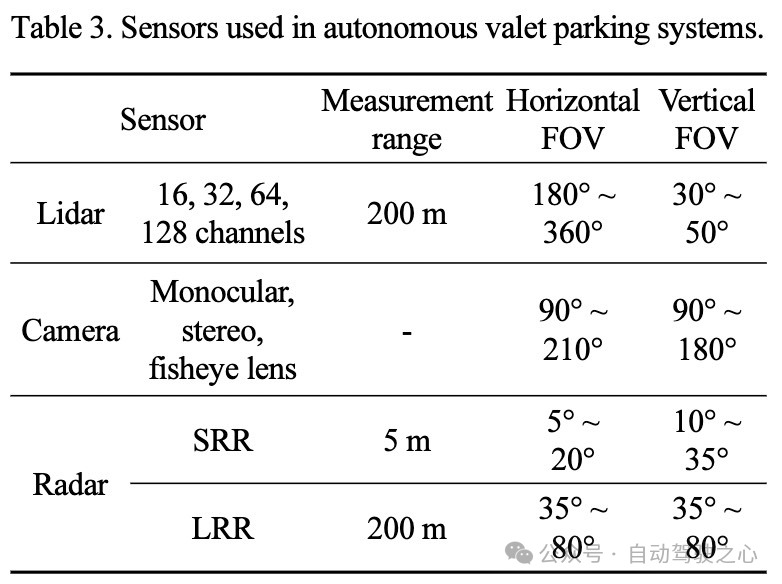
- LiDAR センサーはレーザー光を使用して物体を検出します。現在普及しているライダーは主に 16、32、64、128 ラインのライダーに分かれています。測定範囲は約200メートル、垂直視野は30~50度です。
- カメラセンサーは単眼式、両眼式、魚眼式に大別できます。通常、自動運転車には水平視野が 90 ~ 210 度、垂直視野が 90 ~ 180 度のカメラが搭載されています。
- ミリ波レーダーは距離に基づいて短距離レーダーと長距離レーダーに分類できます。このうち短距離レーダーの射程は約5メートル、水平視野は5~20度、垂直視野は10~35度です。長距離レーダーの射程は約 200 メートル、水平および垂直の視野は 35 ~ 80 度です。
- 衝突防止技術の紹介
自動駐車システムの主な適用シナリオは駐車場であり、多くの車が駐車されているため、衝突防止技術は非常に重要です。衝突防止技術では、超音波センサー、
短波レーダーセンサー、ライダーセンサー、カメラセンサーが主に使用されます。音響センサーとレーダーセンサーは、主に正確な測距を実現するために使用されます。カメラ センサーは主に、連続画像内の同じオブジェクトの位置の違いを使用して、奥行き方向の距離を推定します。 駐車スペース検出テクノロジー
駐車スペースの検出は、検索および運転プロセス中に継続的に実行され、通常は従来のコンピューター ビジョン、ディープ ラーニングが含まれます。および 2 つのメソッドのハイブリッド実装。 従来のコンピュータビジョンでは、下図に示すように、主に駐車スペースライン検出や特徴点検出など、駐車スペースの形状を特定・識別していました。
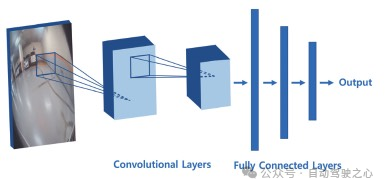
駐車スペースの形状の例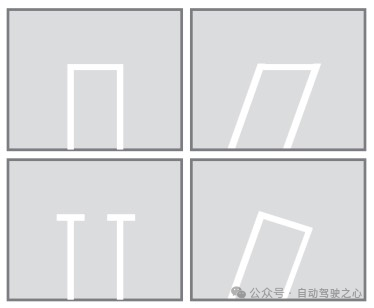 ディープラーニングの急速な発展のおかげで、現在、CNN ネットワークに基づく手法が駐車スペースの検出に広く使用されています。以下の図は、駐車スペース検出のための代表的な畳み込みニューラル ネットワーク構造を表しています。畳み込み層は入力画像の特徴を学習し、特徴データは全結合層を通じて出力されます。これは完全教師あり学習プロセスであるため、出力はトレーニング データ内のラベルによって直接決定されます。
ディープラーニングの急速な発展のおかげで、現在、CNN ネットワークに基づく手法が駐車スペースの検出に広く使用されています。以下の図は、駐車スペース検出のための代表的な畳み込みニューラル ネットワーク構造を表しています。畳み込み層は入力画像の特徴を学習し、特徴データは全結合層を通じて出力されます。これは完全教師あり学習プロセスであるため、出力はトレーニング データ内のラベルによって直接決定されます。
前のステップを 1 回実行した場合検索運転プロセス中に利用可能な駐車スペースが見つかると、システムは自動駐車プロセスを呼び出します。一般に、自動駐車プロセスを実装するには、パス生成手法を使用します。現在、主流の経路生成手法には、主にアルゴリズムベースの手法と強化学習ベースの手法が含まれます。 アルゴリズムベースのアプローチでは、駐車スペースまでの経路の位置と形状、および車両の現在位置を計算します。適切な駐車経路を計算するために、アルゴリズムには、最適制御問題、グリッドベースの経路計画方法、ランダム ツリーの迅速な探索などのアルゴリズムが含まれます。
強化学習ベースの手法は、自動駐車シミュレーターでの自動駐車プロセスの最適なパスを生成できます。自動駐車シミュレーターでは、車両は一般的な駐車手順を学習します。この学習手法は、下図に示すように、経路生成処理と評価を繰り返すことで、最も駐車精度の高い最適経路を継続的に求めます。

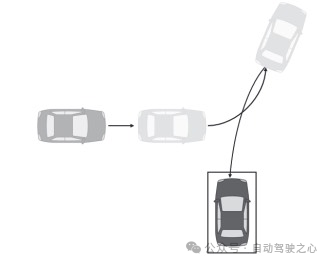
自動駐車の後退駐車プロセス
運転に戻るプロセス
運転に戻るプロセスとは、自動運転車が駐車スペースに入って待機している場合、ユーザーは自動運転車に電話をかけると、ユーザーが指定した場所まで自動運転車を移動させることができる。このプロセスでは、パス追跡テクノロジーを使用する必要があります。
現在、経路追跡技術には、移動経路を追跡する方法と、変更された経路を追跡する方法が含まれています。ただし、どちらの方法も同様の車両制御アルゴリズムを使用しますので、詳しくは論文[1-2]を参照してください。一般的な考え方は、車両の現在位置と舵角の状態を考慮して、生成された経路に沿って車両を移動させる制御コマンドを実行することです。
結論
現在、自動駐車技術に対する需要が高まっているため、さまざまな国やメーカーが自動駐車システムの開発を精力的に行っています。自動駐車技術の急速な発展を考慮して、この記事では、自動駐車システムにおける標準化傾向、評価基準、および自動駐車システムのさまざまなコンポーネントをまとめて詳しく紹介します。
元のリンク: https://mp.weixin.qq.com/s/UPwW0E8LTX5V79GK12HF_Q

以上が業界標準、トレンド評価、システム導入を統合した自動駐車に関する一般的な調査の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 1662
1662
 14
1419
52
1313
25
1262
29
1235
24
14
1419
52
1313
25
1262
29
1235
24

 I7-14650HX の評価と実行パラメータの詳細な紹介
Feb 28, 2024 pm 02:00 PM
I7-14650HX の評価と実行パラメータの詳細な紹介
Feb 28, 2024 pm 02:00 PM
I7-14650HX は今年発売された最新のグラフィックス カードです。このグラフィックス カード プロセッサのアプリケーション能力は非常に優れており、8 つの大きなコアと 12 つの小さなコアの構成を備えており、最高周波数に達しています。一緒に見てみましょう。 。 I7-14650HX の評価: 1. i7-14650HX プロセッサーの仕様は、8 つの大きなコア + 8 つの小さなコアであり、テストでは周波数は 5181MHz まで高くなります。既存の i7-13650HX と比較して、このプロセッサーは 2 つの大きなコアを追加し、現在の i7-13700HX のコア構成に達し、周波数も向上しました。 2. Intel i7-14700HX モバイル プロセッサも発表されており、8 個の大型コア + 12 個の小型コアで構成され、テストでは最大周波数 5462MHz に達しました。 3
 R9-7940HXの評価と実行パラメータの紹介
Feb 25, 2024 pm 09:16 PM
R9-7940HXの評価と実行パラメータの紹介
Feb 25, 2024 pm 09:16 PM
Ryzen 97940HX という謎のプロセッサーをお勧めします。これが 7040 製品を輝かせる縁の下の力持ちです。実質的にはRyzen 97945HXのダウンクロック版とも言えますが、その詳細な技術情報に興味のある方は、以下の貴重な情報を参照してください。 R9-7940HX レビュー: 1. 最先端の 5nm プロセス テクノロジーと高度な Zen4 CPU アーキテクチャを搭載し、流行の PCIe5.0 規格のサポートも選択できます。 2. シングルコア処理能力の点では、Ryzen 97940HX と兄貴分の 7945HX の間にはまだ差がありますが、それでも Phoenix プラットフォームの優れた R97940H プロセッサを上回っています。 3. この強力なプロセッサには最大 16 コアが搭載されています
 I7-14700HX の評価と実行パラメータの詳細な紹介
Feb 26, 2024 pm 04:55 PM
I7-14700HX の評価と実行パラメータの詳細な紹介
Feb 26, 2024 pm 04:55 PM
I7-14700HX は非常に優れた優れたプロセッサーであり、究極のゲーム パフォーマンスを保証する強力な 20 コア、28 スレッド設計を備えています。このグラフィックス カードのパフォーマンスを見てみましょう。 I7-14700HX レビュー: 1. Intel7 の高度なパフォーマンス プロセス テクノロジを使用したこの製品は、20 コアと 28 スレッドの強力な設計を備えており、理論的には、単一コアの最大コア周波数は 5.5 GHz に達し、間違いなくマルチタスク処理とパフォーマンスが向上します。ゲームのパフォーマンス、パフォーマンスの側面。 2. Intel7高性能プロセステクノロジープラットフォームをベースにした最新の第14世代Intel Core i7-14700HXプロセッサーを搭載。 3. プロセッサーは破壊的な AdaLovelace アーキテクチャを採用しており、
 R9-7945HX の評価と実行パラメータの紹介
Feb 25, 2024 pm 04:50 PM
R9-7945HX の評価と実行パラメータの紹介
Feb 25, 2024 pm 04:50 PM
R9-7945HX は、AMD が開発した優れたパフォーマンスの CPU であることは間違いなく、さまざまなハイエンドゲーミングノートや高性能薄型軽量コンピューター製品に広く使用されています。では、R9-7945HXはどのような性能を持っているのでしょうか?次に詳しく説明していきます。 R9-7945HX レビュー: 1. 新しい 1/i9 シリーズのスター製品として、14900HX の最高ターボ周波数は驚くべき 5.8GHz にまで跳ね上がることが予想されており、これは間違いなくプロセッサ周波数の世界記録を再び更新するでしょう。 2. この改善により、Intel は新しい i9-14900HX プロセッサのコア数、スレッド処理能力、キャッシュ メモリ容量の大幅な向上を達成しました。これにより、より強力なマルチタスク機能と、
 I9-14900HX の評価と実行パラメータの概要
Feb 25, 2024 pm 04:40 PM
I9-14900HX の評価と実行パラメータの概要
Feb 25, 2024 pm 04:40 PM
かなり謎に満ちたインテル第 14 世代モバイル版 i9-14900HX プロセッサーが静かに登場し、ノートブックコンピューターのプロセッサー分野の新たな頂点となりました。この機会に、この優れたパフォーマンスの中央処理装置 (CPU) について、包括的かつ深く理解していないユーザーも多いと思いますので、著名なユーザーの皆様に詳細かつ簡単に紹介したいと思います。 I9-14900HX レビュー: 1. 新しい 1/i9 シリーズのスター製品として、14900HX の最高ターボ周波数は驚くべき 5.8 GHz にまで跳ね上がることが期待されており、これは間違いなくプロセッサ周波数の世界記録を再び更新するでしょう。 2. この改善では、インテルは新しい i9-14900HX プロセッサーのコア数、スレッド処理能力、キャッシュ メモリを改善しました。
 R9-7845HX の評価と実行パラメータの詳細な紹介
Feb 27, 2024 am 09:58 AM
R9-7845HX の評価と実行パラメータの詳細な紹介
Feb 27, 2024 am 09:58 AM
R9-7845HX は、解像度 2k、240hz リフレッシュをサポートする非常に優れたグラフィックス カードで、ゲーム体験も非常に優れています。 R9-7845HX の評価: 1. R97845hx プロセッサは 12 コア、24 スレッド、基本周波数 3.00 GHz、最大コア周波数 5.20 GHz、熱設計消費電力 (TDP) 55 W を備えています。 2.このプロセッサのコアディスプレイはAMD Radeon610Mで、グラフィックスカードの基本周波数は0.40GHzで、加速周波数は2.20GHzに達します。 3. ZEN3 アーキテクチャの R77735H と比較して、R97845hx は
 Cloud Whale インテリジェント フロア スクラバー S1 の体験: 全能でも完璧でもありませんが、非常に実用的です。
Jan 12, 2024 pm 01:06 PM
Cloud Whale インテリジェント フロア スクラバー S1 の体験: 全能でも完璧でもありませんが、非常に実用的です。
Jan 12, 2024 pm 01:06 PM
いつからかわかりませんが、家の掃除がめんどくさいようになりました。働き始めたばかりの頃は、毎晩家に帰ると10分以上かけて床のホコリを掃いたり、あれこれ拭いたりしていましたが、きれいな環境だけが快適に暮らせるのだと感じていました。しかし、時間が経つにつれて、私の怠惰はますます強くなり、毎日の掃除はもちろん、地面に落ちているゴミを見つけると拾うのが面倒になり、時間が経つにつれて私の部屋はどんどん散らかっていきました。そのことで大家さんに何度か叱られました。掃くか掃かないかで悩んでいたところ、突然クラウドホエールから新製品クラウドホエール インテリジェントフロアスクラバーS1が届きました。社内でこの種の製品を最も必要としている人物として、もちろんすぐに購入し、自宅に持ち帰って3日間使用した後、しばらく一時的に「引き取り」することにしました。十分小さくてスペースをとらないので、十分です
 I7-13700HX の評価と実行パラメータの詳細な紹介
Feb 26, 2024 pm 04:50 PM
I7-13700HX の評価と実行パラメータの詳細な紹介
Feb 26, 2024 pm 04:50 PM
I7-13700HX は最新の Intel プロセッサであり、改良されたハードウェア スレッド スケジューラを使用しており、ゲーム パフォーマンスに対する要求が高いプレイヤーにとって非常に使いやすいプロセッサです。このプロセッサの具体的な内容を見てみましょう。 I7-13700HX レビュー 1. このプロセッサーのパフォーマンスは、最新の i9-13900H を含む H シリーズ標準プロセッサーのパフォーマンスをはるかに上回り、前世代の最も一般的な i7-12700H でさえそれに匹敵することはできません。 2. マルチコア スコアは 20682、シングルコア スコアは 1894 です。 i7-12700Hと比較すると、マルチコア性能は約35%向上、シングルコア性能は約25%向上と大幅に向上している。 3. データの観点から、i7-13700H は 2069-2456cb をリリースできます。
