

粒子群最適化アルゴリズム (PSO) の Python 実装の概要

粒子群优化算法(PSO)是一种强大的元启发式算法,受群体行为启发,如鱼和鸟群。
粒子群算法概念
假设有一群鸟,它们都感到饥饿,正在寻找食物。这些鸟可以与计算系统中渴望资源的任务相关联。在它们所在的地方,只有一种食物颗粒,这种食物颗粒可以代表资源。
众所周知,任务很多,资源有限。因此,这已成为与特定计算环境中类似的条件。
现在,鸟类不知道食物颗粒隐藏在何处。在这种情况下,应该如何设计寻找食物颗粒的算法。
鸟类寻找食物的方式可以用来设计一种称为粒子群优化算法(PSO)的算法。如果每只鸟都试图独自寻找食物,可能会造成严重破坏并浪费大量时间。尽管鸟类不知道食物颗粒确切的位置,但它们知道与食物颗粒的距离。因此,最佳的寻找食物颗粒的方法是跟随离食物颗粒最近的鸟类。PSO算法模拟了鸟类的这种行为,并在计算环境中应用。这种算法的应用可以有效地解决一些优化问题。
Python实现粒子群算法
设定问题参数:维数(d)、下限(minx)、上限(maxx)
算法超参数:粒子数(N)、最大迭代次数(max_iter)、惰性(w)、粒子的认知(C1)、群体的社会影响(C2)
Step1:随机初始化N个粒子Xi(i=1,2,...,n)的Swarm种群
Step2:选择超参数值w,c1和c2
Step3:
For Iter in range(max_iter): For i in range(N): a.Compute new velocity of ith particle swarm<i>.velocity= w*swarm<i>.velocity+ r1*c1*(swarm<i>.bestPos-swarm<i>.position)+ r2*c2*(best_pos_swarm-swarm<i>.position) b.If velocity is not in range[minx,max]then clip it if swarm<i>.velocity<minx: swarm<i>.velocity=minx elif swarm<i>.velocity[k]>maxx: swarm<i>.velocity[k]=maxx c.Compute new position of ith particle using its new velocity swarm<i>.position+=swarm<i>.velocity d.Update new best of this particle and new best of Swarm if swarm<i>.fitness<swarm<i>.bestFitness: swarm<i>.bestFitness=swarm<i>.fitness swarm<i>.bestPos=swarm<i>.position if swarm<i>.fitness<best_fitness_swarm best_fitness_swarm=swarm<i>.fitness best_pos_swarm=swarm<i>.position End-for End-for Step 4:Return best particle of Swarm
以上が粒子群最適化アルゴリズム (PSO) の Python 実装の概要の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7521
7521
 15
1378
52
81
11
21
70
15
1378
52
81
11
21
70

 Gray Wolf 最適化アルゴリズム (GWO) とその長所と短所の詳細な分析
Jan 19, 2024 pm 07:48 PM
Gray Wolf 最適化アルゴリズム (GWO) とその長所と短所の詳細な分析
Jan 19, 2024 pm 07:48 PM
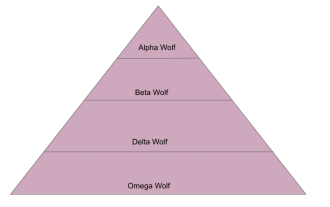
ハイイロオオカミ最適化アルゴリズム (GWO) は、自然界のハイイロオオカミのリーダーシップ階層と狩猟メカニズムをシミュレートする個体群ベースのメタヒューリスティック アルゴリズムです。ハイイロオオカミ アルゴリズムのインスピレーション 1. ハイイロオオカミは頂点捕食者であると考えられており、食物連鎖の頂点に位置します。 2. ハイイロオオカミは集団で生活すること(集団生活)を好み、各群れには平均 5 ~ 12 頭のオオカミがいます。 3. ハイイロオオカミには、以下に示すように、非常に厳格な社会的支配階層があります。 アルファオオカミ: アルファオオカミは、ハイイロオオカミのグループ全体で支配的な地位を占め、ハイイロオオカミのグループ全体を指揮する権利を持っています。アルゴリズムの適用において、Alpha Wolf は最良のソリューションの 1 つであり、最適化アルゴリズムによって生成される最適なソリューションです。ベータ オオカミ: ベータ オオカミはアルファ オオカミに定期的に報告し、アルファ オオカミが最善の決定を下せるように支援します。アルゴリズム アプリケーションでは、Beta Wolf は次のことができます。
 ネストされたサンプリング アルゴリズムの基本原理と実装プロセスを調べる
Jan 22, 2024 pm 09:51 PM
ネストされたサンプリング アルゴリズムの基本原理と実装プロセスを調べる
Jan 22, 2024 pm 09:51 PM
ネストされたサンプリング アルゴリズムは、複雑な確率分布の下で積分または合計を計算するために使用される効率的なベイズ統計推論アルゴリズムです。これは、パラメーター空間を等しい体積の複数のハイパーキューブに分解し、最小体積のハイパーキューブの 1 つを徐々に反復的に「押し出し」、そのハイパーキューブをランダムなサンプルで満たして、確率分布の整数値をより適切に推定することによって機能します。ネストされたサンプリング アルゴリズムは、継続的な反復を通じて、高精度の整数値とパラメーター空間の境界を取得でき、モデルの比較、パラメーターの推定、モデルの選択などの統計的問題に適用できます。このアルゴリズムの中心的な考え方は、複雑な積分問題を一連の単純な積分問題に変換し、パラメーター空間の体積を徐々に減らすことで実際の積分値に近づくことです。各反復ステップはパラメータ空間からランダムにサンプリングします。
 Sparrow Search Algorithm (SSA) の原理、モデル、構成を分析する
Jan 19, 2024 pm 10:27 PM
Sparrow Search Algorithm (SSA) の原理、モデル、構成を分析する
Jan 19, 2024 pm 10:27 PM
スズメ検索アルゴリズム (SSA) は、スズメの対捕食行動と採餌行動に基づいたメタヒューリスティック最適化アルゴリズムです。スズメの採餌行動は、生産者とスカベンジャーの 2 つの主なタイプに分類できます。生産者は積極的に食料を探しますが、スカベンジャーは生産者からの食料を奪い合います。スズメ検索アルゴリズム (SSA) の原理 スズメ検索アルゴリズム (SSA) では、各スズメは隣のスズメの行動に細心の注意を払います。さまざまな採餌戦略を採用することで、個体は蓄えられたエネルギーを効率的に利用して、より多くの食物を追求することができます。さらに、鳥は探索空間では捕食者に対してより脆弱であるため、より安全な場所を見つける必要があります。コロニーの中心にいる鳥は、隣の鳥の近くにいることで、自分自身の危険範囲を最小限に抑えることができます。鳥は捕食者を見つけると、警報を発します。
 Bellman Ford アルゴリズムと Python での実装の詳細な説明
Jan 22, 2024 pm 07:39 PM
Bellman Ford アルゴリズムと Python での実装の詳細な説明
Jan 22, 2024 pm 07:39 PM
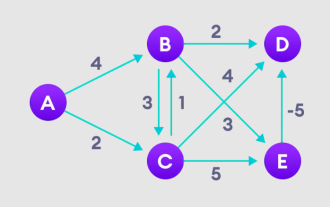
Bellman Ford アルゴリズムは、重み付きグラフ内のターゲット ノードから他のノードへの最短パスを見つけることができます。これはダイクストラ アルゴリズムに非常に似ており、ベルマン フォード アルゴリズムは負の重みを持つグラフを処理でき、実装の点では比較的単純です。ベルマン フォード アルゴリズムの原理の詳細な説明 ベルマン フォード アルゴリズムは、開始頂点から他のすべての頂点までのパスの長さを過大評価することにより、過大評価されたパスよりも短い新しいパスを繰り返し見つけます。各ノードのパス距離を記録したいので、それをサイズ n の配列に格納できます。ここで、n はノードの数も表します。例 図 1. 開始ノードを選択し、それを他のすべての頂点に無限に割り当て、パス値を記録します。 2. 各エッジを訪問し、緩和操作を実行して、最短パスを継続的に更新します。 3. 私たちが必要とするのは
 Wu-Manber アルゴリズムと Python 実装手順の概要
Jan 23, 2024 pm 07:03 PM
Wu-Manber アルゴリズムと Python 実装手順の概要
Jan 23, 2024 pm 07:03 PM
Wu-Manber アルゴリズムは、文字列を効率的に検索するために使用される文字列一致アルゴリズムです。これは、Boyer-Moore アルゴリズムと Knuth-Morris-Pratt アルゴリズムの利点を組み合わせたハイブリッド アルゴリズムで、高速かつ正確なパターン マッチングを提供します。 Wu-Manber アルゴリズムのステップ 1. パターンの考えられる各部分文字列を、その部分文字列が出現するパターン位置にマップするハッシュ テーブルを作成します。 2. このハッシュ テーブルは、テキスト内のパターンの潜在的な開始位置を迅速に特定するために使用されます。 3. テキストを繰り返し処理し、各文字をパターン内の対応する文字と比較します。 4. 文字が一致する場合は、次の文字に移動して比較を続行できます。 5. 文字が一致しない場合は、ハッシュ テーブルを使用して、パターン内の次の文字候補を決定できます。
 id3 アルゴリズムにおける情報獲得の役割は何ですか?
Jan 23, 2024 pm 11:27 PM
id3 アルゴリズムにおける情報獲得の役割は何ですか?
Jan 23, 2024 pm 11:27 PM
ID3 アルゴリズムは、決定木学習の基本アルゴリズムの 1 つです。各特徴の情報ゲインを計算して決定木を生成することにより、最適な分割点を選択します。情報ゲインは ID3 アルゴリズムの重要な概念であり、分類タスクに対する特徴の寄与を測定するために使用されます。この記事では、ID3 アルゴリズムにおける情報ゲインの概念、計算方法、応用について詳しく紹介します。 1. 情報エントロピーの概念 情報エントロピーは情報理論の概念であり、確率変数の不確実性を測定します。離散乱数の場合、p(x_i) は乱数 X が値 x_i をとる確率を表します。手紙
 数値最適化原理とWhale Optimization Algorithm (WOA) の分析
Jan 19, 2024 pm 07:27 PM
数値最適化原理とWhale Optimization Algorithm (WOA) の分析
Jan 19, 2024 pm 07:27 PM
Whale Optimization Algorithm (WOA) は、ザトウクジラの狩猟行動をシミュレートし、数値問題の最適化に使用される、自然にヒントを得たメタヒューリスティック最適化アルゴリズムです。 Whale Optimization Algorithm (WOA) は、ランダムなソリューションのセットから開始し、ランダムに選択された検索エージェント、または各反復での検索エージェントの位置更新を通じてこれまでの最良のソリューションに基づいて最適化します。 Whale Optimization アルゴリズムのインスピレーション Whale Optimization アルゴリズムは、ザトウクジラの狩猟行動からインスピレーションを受けています。ザトウクジラは、オキアミや魚の群れなど、水面近くにある餌を好みます。そのため、ザトウクジラは狩りの際、ボトムアップスパイラルに泡を吹きながら餌を集めて泡のネットワークを形成します。 「上向きスパイラル」操縦では、ザトウクジラは約 12 メートル潜水し、獲物の周りにらせん状の泡を形成し始め、上向きに泳ぎます。
 スケール不変特徴量 (SIFT) アルゴリズム
Jan 22, 2024 pm 05:09 PM
スケール不変特徴量 (SIFT) アルゴリズム
Jan 22, 2024 pm 05:09 PM
スケール不変特徴変換 (SIFT) アルゴリズムは、画像処理およびコンピューター ビジョンの分野で使用される特徴抽出アルゴリズムです。このアルゴリズムは、コンピュータ ビジョン システムにおけるオブジェクト認識とマッチングのパフォーマンスを向上させるために 1999 年に提案されました。 SIFT アルゴリズムは堅牢かつ正確であり、画像認識、3 次元再構成、ターゲット検出、ビデオ追跡などの分野で広く使用されています。複数のスケール空間内のキーポイントを検出し、キーポイントの周囲の局所特徴記述子を抽出することにより、スケール不変性を実現します。 SIFT アルゴリズムの主なステップには、スケール空間の構築、キー ポイントの検出、キー ポイントの位置決め、方向の割り当て、および特徴記述子の生成が含まれます。これらのステップを通じて、SIFT アルゴリズムは堅牢でユニークな特徴を抽出することができ、それによって効率的な画像処理を実現します。