

拡張コンボリューションとアトラスコンボリューションの類似点、相違点、および関係を比較します。

拡張畳み込みと拡張畳み込みは、畳み込みニューラル ネットワークでよく使用される演算です。この記事では、それらの違いと関係について詳しく紹介します。
1. 拡張畳み込み
拡張畳み込みは、拡張畳み込みまたは拡張畳み込みとも呼ばれ、畳み込みニューラル ネットワーク操作です。これは、従来の畳み込み演算に基づいた拡張であり、畳み込みカーネルに穴を挿入することで畳み込みカーネルの受容野を増加させます。これにより、ネットワークはより広範囲の機能をより適切に捕捉できるようになります。拡張コンボリューションは画像処理の分野で広く使用されており、パラメータの数や計算量を増やすことなくネットワークのパフォーマンスを向上させることができます。コンボリューション カーネルの受容野を拡張することにより、拡張コンボリューションは画像内のグローバル情報をより適切に処理できるようになり、それによって特徴抽出の効果が向上します。
拡張畳み込みの主なアイデアは、畳み込みカーネルの周囲にいくつかの間隔を導入することです。これらの間隔により、畳み込みカーネルは入力特徴マップ上で「ジャンプ」方式で移動できます。これにより、コンボリューション カーネルのサイズを変更せずに、出力特徴マップのサイズが増加します。具体的には、入力特徴マップが \sum_{m}\sum_{n}X_{(i m\times r),(j n\times r)}K_{m,n}
であると仮定します。ここで、r は拡張率、コンボリューション カーネルのホールのサイズを表し、m と n はコンボリューション カーネルの行インデックスと列インデックスです。拡大率rの大きさを変えることで、異なる受容野の特徴マップを取得することができます。
2. Atrous 畳み込み
Atrous 畳み込みは、畳み込みニューラル ネットワークで一般的に使用される畳み込み演算であり、拡張に関連しています。は非常に似ていますが、実装が若干異なります。拡張畳み込みと従来の畳み込み演算の違いは、畳み込み演算にいくつかの穴が挿入されていることです。これらの穴により、入力特徴マップ上で畳み込みカーネルが「ジャンプ」して移動し、出力特徴マップのサイズが削減されます。コンボリューションカーネルのサイズは変更されません。
拡張畳み込みの主なアイデアは、畳み込みカーネルにいくつかの穴を挿入することです。これらの穴により、畳み込みカーネルが入力特徴マップ上で「ジャンプ」して移動するため、コンボリューション カーネルのサイズは変更せずに、出力特徴マップのサイズが増加します。具体的には、入力特徴マップが \sum_{m}\sum_{n}X_{(i m\times r),(j n\times r)}K_{m,n}
であると仮定します。ここで、r はボイド率、挿入されたホールのサイズを表し、m と n はコンボリューション カーネルの行インデックスと列インデックスです。ホール率 r のサイズを変更することにより、異なる受容野の特徴マップを取得できます。
3. 拡張畳み込みと拡張畳み込みの関係
拡張畳み込みと拡張畳み込みの概念は非常に似ています。従来の畳み込み演算。実際、拡張畳み込みのホール レート d は実際には拡張畳み込みのホール レート r-1 であるため、拡張畳み込みは拡張畳み込みの特殊な形式と見なすことができます。したがって、拡張コンボリューションは、穴を挿入することによってコンボリューション カーネルの受容野を拡張する特殊な種類の拡張コンボリューションとみなすことができ、拡張コンボリューションを使用して実装することもできます。
さらに、拡張畳み込みと拡張畳み込みは両方とも、画像分類、セマンティック セグメンテーションなど、畳み込みニューラル ネットワークのさまざまなタスクに使用できます。両方とも、さまざまな用途で効果的です。畳み込みニューラル ネットワークのパフォーマンスを向上させることができます。ただし、拡張コンボリューションのホール率 d は離散的であるため、その受容野の精度は拡張コンボリューションの受信野の精度よりわずかに低くなります。したがって、拡張畳み込みは、増加した受容野を必要とするタスクでより一般的に使用される可能性があります。
つまり、拡張畳み込みと拡張畳み込みは、畳み込みニューラル ネットワークで一般的に使用される畳み込み演算です。これらは相互に変換でき、異なるタスクでも使用できます。具体的には、どの畳み込み操作は特定のタスク要件に基づいて決定する必要があります。
以上が拡張コンボリューションとアトラスコンボリューションの類似点、相違点、および関係を比較します。の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 1658
1658
 14
1415
52
1309
25
1257
29
1231
24
14
1415
52
1309
25
1257
29
1231
24

 テキスト分類に双方向 LSTM モデルを使用するケーススタディ
Jan 24, 2024 am 10:36 AM
テキスト分類に双方向 LSTM モデルを使用するケーススタディ
Jan 24, 2024 am 10:36 AM
双方向 LSTM モデルは、テキスト分類に使用されるニューラル ネットワークです。以下は、テキスト分類タスクに双方向 LSTM を使用する方法を示す簡単な例です。まず、必要なライブラリとモジュールをインポートする必要があります: importosimportnumpyasnpfromkeras.preprocessing.textimportTokenizerfromkeras.preprocessing.sequenceimportpad_sequencesfromkeras.modelsimportSequentialfromkeras.layersimportDense,Em
 ニューラル ネットワークの浮動小数点オペランド (FLOPS) の計算
Jan 22, 2024 pm 07:21 PM
ニューラル ネットワークの浮動小数点オペランド (FLOPS) の計算
Jan 22, 2024 pm 07:21 PM
FLOPS はコンピュータの性能評価の規格の 1 つで、1 秒あたりの浮動小数点演算の回数を測定するために使用されます。ニューラル ネットワークでは、モデルの計算の複雑さとコンピューティング リソースの使用率を評価するために FLOPS がよく使用されます。これは、コンピューターの計算能力と効率を測定するために使用される重要な指標です。ニューラル ネットワークは、データ分類、回帰、クラスタリングなどのタスクを実行するために使用される、複数のニューロン層で構成される複雑なモデルです。ニューラル ネットワークのトレーニングと推論には、多数の行列の乗算、畳み込み、その他の計算操作が必要となるため、計算の複雑さは非常に高くなります。 FLOPS (FloatingPointOperationsperSecond) を使用すると、ニューラル ネットワークの計算の複雑さを測定し、モデルの計算リソースの使用効率を評価できます。フロップ
 RNN、LSTM、GRU の概念、違い、長所と短所を調べる
Jan 22, 2024 pm 07:51 PM
RNN、LSTM、GRU の概念、違い、長所と短所を調べる
Jan 22, 2024 pm 07:51 PM
時系列データでは、観測間に依存関係があるため、相互に独立していません。ただし、従来のニューラル ネットワークは各観測値を独立したものとして扱うため、時系列データをモデル化するモデルの能力が制限されます。この問題を解決するために、リカレント ニューラル ネットワーク (RNN) が導入されました。これは、ネットワーク内のデータ ポイント間の依存関係を確立することにより、時系列データの動的特性をキャプチャするためのメモリの概念を導入しました。反復接続を通じて、RNN は以前の情報を現在の観測値に渡して、将来の値をより適切に予測できます。このため、RNN は時系列データを含むタスクにとって強力なツールになります。しかし、RNN はどのようにしてこの種の記憶を実現するのでしょうか? RNN は、ニューラル ネットワーク内のフィードバック ループを通じて記憶を実現します。これが RNN と従来のニューラル ネットワークの違いです。
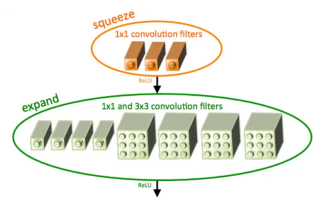 SqueezeNet の概要とその特徴
Jan 22, 2024 pm 07:15 PM
SqueezeNet の概要とその特徴
Jan 22, 2024 pm 07:15 PM
SqueezeNet は、高精度と低複雑性のバランスが取れた小型で正確なアルゴリズムであり、リソースが限られているモバイル システムや組み込みシステムに最適です。 2016 年、DeepScale、カリフォルニア大学バークレー校、スタンフォード大学の研究者は、コンパクトで効率的な畳み込みニューラル ネットワーク (CNN) である SqueezeNet を提案しました。近年、研究者は SqueezeNetv1.1 や SqueezeNetv2.0 など、SqueezeNet にいくつかの改良を加えました。両方のバージョンの改良により、精度が向上するだけでなく、計算コストも削減されます。 ImageNet データセット上の SqueezeNetv1.1 の精度
 拡張コンボリューションとアトラスコンボリューションの類似点、相違点、および関係を比較します。
Jan 22, 2024 pm 10:27 PM
拡張コンボリューションとアトラスコンボリューションの類似点、相違点、および関係を比較します。
Jan 22, 2024 pm 10:27 PM
拡張畳み込みと拡張畳み込みは、畳み込みニューラル ネットワークでよく使用される演算です。この記事では、それらの違いと関係について詳しく紹介します。 1. 拡張畳み込み 拡張畳み込みは、拡張畳み込みまたは拡張畳み込みとも呼ばれる、畳み込みニューラル ネットワークの演算です。これは、従来の畳み込み演算に基づいた拡張であり、畳み込みカーネルに穴を挿入することで畳み込みカーネルの受容野を増加させます。これにより、ネットワークはより広範囲の機能をより適切に捕捉できるようになります。拡張コンボリューションは画像処理の分野で広く使用されており、パラメータの数や計算量を増やすことなくネットワークのパフォーマンスを向上させることができます。コンボリューション カーネルの受容野を拡張することにより、拡張コンボリューションは画像内のグローバル情報をより適切に処理できるようになり、それによって特徴抽出の効果が向上します。拡張畳み込みの主なアイデアは、いくつかの要素を導入することです。
 ツイン ニューラル ネットワーク: 原理と応用分析
Jan 24, 2024 pm 04:18 PM
ツイン ニューラル ネットワーク: 原理と応用分析
Jan 24, 2024 pm 04:18 PM
シャム ニューラル ネットワークは、ユニークな人工ニューラル ネットワーク構造です。これは、同じパラメーターと重みを共有する 2 つの同一のニューラル ネットワークで構成されます。同時に、2 つのネットワークは同じ入力データも共有します。 2 つのニューラル ネットワークは構造的に同一であるため、このデザインは双子からインスピレーションを得ています。シャム ニューラル ネットワークの原理は、2 つの入力データ間の類似性や距離を比較することによって、画像マッチング、テキスト マッチング、顔認識などの特定のタスクを完了することです。トレーニング中、ネットワークは、類似したデータを隣接する領域にマッピングし、異なるデータを離れた領域にマッピングしようとします。このようにして、ネットワークはさまざまなデータを分類または照合する方法を学習して、対応するデータを実現できます。
 因果畳み込みニューラル ネットワーク
Jan 24, 2024 pm 12:42 PM
因果畳み込みニューラル ネットワーク
Jan 24, 2024 pm 12:42 PM
因果畳み込みニューラル ネットワークは、時系列データの因果関係の問題のために設計された特別な畳み込みニューラル ネットワークです。従来の畳み込みニューラル ネットワークと比較して、因果畳み込みニューラル ネットワークは、時系列の因果関係を保持するという独特の利点があり、時系列データの予測と分析に広く使用されています。因果畳み込みニューラル ネットワークの中心的なアイデアは、畳み込み演算に因果関係を導入することです。従来の畳み込みニューラルネットワークは、現時点の前後のデータを同時に認識できますが、時系列予測では情報漏洩の問題が発生する可能性があります。現時点での予測結果は、将来の時点のデータに影響を受けるからです。この問題を解決するのが因果畳み込みニューラル ネットワークであり、現時点と過去のデータのみを認識することができ、将来のデータを認識することはできません。
 畳み込みニューラル ネットワークを使用した画像のノイズ除去
Jan 23, 2024 pm 11:48 PM
畳み込みニューラル ネットワークを使用した画像のノイズ除去
Jan 23, 2024 pm 11:48 PM
畳み込みニューラル ネットワークは、画像のノイズ除去タスクで優れたパフォーマンスを発揮します。学習したフィルターを利用してノイズを除去し、元の画像を復元します。この記事では、畳み込みニューラル ネットワークに基づく画像ノイズ除去方法を詳しく紹介します。 1. 畳み込みニューラル ネットワークの概要 畳み込みニューラル ネットワークは、複数の畳み込み層、プーリング層、全結合層の組み合わせを使用して画像の特徴を学習および分類する深層学習アルゴリズムです。畳み込み層では、畳み込み演算を通じて画像の局所的な特徴が抽出され、それによって画像内の空間相関が捕捉されます。プーリング層は、特徴の次元を削減することで計算量を削減し、主要な特徴を保持します。完全に接続された層は、学習した特徴とラベルをマッピングして画像分類やその他のタスクを実装する役割を果たします。このネットワーク構造の設計により、畳み込みニューラル ネットワークは画像処理と認識に役立ちます。
