

Python で A* アルゴリズムを実装する詳細な手順を学習します。

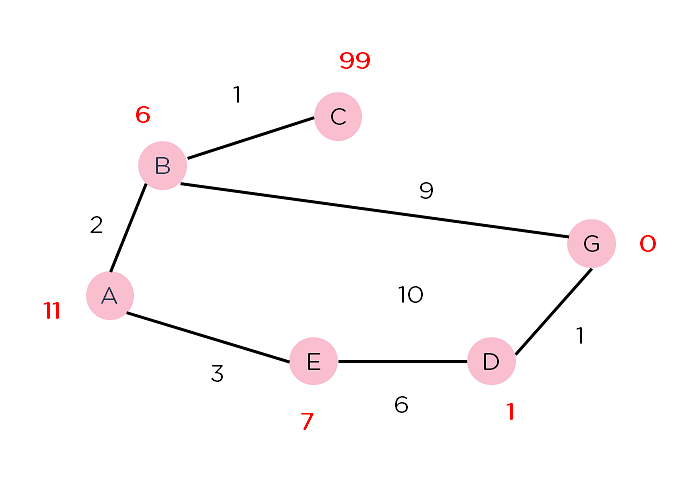
以此加权图为例,用Python实现A*算法。加权图中的节点用粉红色圆圈表示,并且给出了沿节点的路径的权重。节点上方的数字代表节点的启发式值。
首先为算法创建类。一个用于存储与起始节点的距离,另一个用于存储父节点。并将它们初始化为0,以及起始节点。
def aStarAlgo(start_node,stop_node):
open_set=set(start_node)
closed_set=set()
g={}
parents={}
g[start_node]=0
parents[start_node]=start_node找到具有最低f(n)值的相邻节点,针对到达目标节点的条件进行编码。如果不是这种情况,则将当前节点放入打开列表中,并设置其父节点。
While len(open_set)>0: n=None for v in open_set: if n==None or g[v]+heuristic(v)<g[n]+heuristic(n): n=v if n==stop_node or Graph_nodes[n]==None: pass else: for(m,weight)in get_neighbors(n): if m not in open_set and m not in closed_set: open_set.add(m) parents[m]=n g[m]=g[n]+weight
如果相邻的g值低于当前节点并且在封闭列表中,则将其替换为这个新节点作为父节点。
else: if g[m]>g[n]+weight: g[m]=g[n]+weight parents[m]=n if m in closed_set: closed_set.remove(m) open_set.add(m)
如果当前g低于前一个g,并且其相邻在open list中,则将其替换为较低的g值,并将相邻的parent更改为当前节点。
如果不在两个列表中,则将其添加到打开列表并设置其g值。
if n==None:
print('Path does not exist!')
return None
if n==stop_node:
path=[]
while parents[n]!=n:
path.append(n)
n=parents[n]
path.append(start_node)
path.reverse()
print('Path found:{}'.format(path))
return path
open_set.remove(n)
closed_set.add(n)
print('Path does not exist!')
return None现在,定义一个函数来返回相邻节点及其距离。
def get_neighbors(v): if v in Graph_nodes: return Graph_nodes[v] else: return None
此外,创建一个函数来检查启发式值。
def heuristic(n):
H_dist={
'A':11,
'B':6,
'C':99,
'D':1,
'E':7,
'G':0,
}
return H_dist[n]描述一下图表并调用A*函数。
Graph_nodes={
'A':[('B',2),('E',3)],
'B':[('C',1),('G',9)],
'C':Node,
'E':[('D',6)],
'D':[('G',1)],
}
aStarAlgo('A','G')算法遍历图,找到代价最小的路径。
这是通过E => D => G。
以上がPython で A* アルゴリズムを実装する詳細な手順を学習します。の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7557
7557
 15
1384
52
83
11
28
96
15
1384
52
83
11
28
96

 LinuxターミナルでPythonバージョンを表示するときに発生する権限の問題を解決する方法は?
Apr 01, 2025 pm 05:09 PM
LinuxターミナルでPythonバージョンを表示するときに発生する権限の問題を解決する方法は?
Apr 01, 2025 pm 05:09 PM
LinuxターミナルでPythonバージョンを表示する際の許可の問題の解決策PythonターミナルでPythonバージョンを表示しようとするとき、Pythonを入力してください...
 あるデータフレームの列全体を、Python内の異なる構造を持つ別のデータフレームに効率的にコピーする方法は?
Apr 01, 2025 pm 11:15 PM
あるデータフレームの列全体を、Python内の異なる構造を持つ別のデータフレームに効率的にコピーする方法は?
Apr 01, 2025 pm 11:15 PM
PythonのPandasライブラリを使用する場合、異なる構造を持つ2つのデータフレーム間で列全体をコピーする方法は一般的な問題です。 2つのデータがあるとします...
 プロジェクトの基本と問題駆動型の方法で10時間以内にコンピューター初心者プログラミングの基本を教える方法は?
Apr 02, 2025 am 07:18 AM
プロジェクトの基本と問題駆動型の方法で10時間以内にコンピューター初心者プログラミングの基本を教える方法は?
Apr 02, 2025 am 07:18 AM
10時間以内にコンピューター初心者プログラミングの基本を教える方法は?コンピューター初心者にプログラミングの知識を教えるのに10時間しかない場合、何を教えることを選びますか...
 中間の読書にどこでもfiddlerを使用するときにブラウザによって検出されないようにするにはどうすればよいですか?
Apr 02, 2025 am 07:15 AM
中間の読書にどこでもfiddlerを使用するときにブラウザによって検出されないようにするにはどうすればよいですか?
Apr 02, 2025 am 07:15 AM
fiddlereveryversings for the-middleの測定値を使用するときに検出されないようにする方法
 正規表現とは何ですか?
Mar 20, 2025 pm 06:25 PM
正規表現とは何ですか?
Mar 20, 2025 pm 06:25 PM
正規表現は、プログラミングにおけるパターンマッチングとテキスト操作のための強力なツールであり、さまざまなアプリケーションにわたるテキスト処理の効率を高めます。
 uvicornは、serving_forever()なしでhttpリクエストをどのように継続的に聞いていますか?
Apr 01, 2025 pm 10:51 PM
uvicornは、serving_forever()なしでhttpリクエストをどのように継続的に聞いていますか?
Apr 01, 2025 pm 10:51 PM
UvicornはどのようにしてHTTPリクエストを継続的に聞きますか? Uvicornは、ASGIに基づく軽量のWebサーバーです。そのコア機能の1つは、HTTPリクエストを聞いて続行することです...
 人気のあるPythonライブラリとその用途は何ですか?
Mar 21, 2025 pm 06:46 PM
人気のあるPythonライブラリとその用途は何ですか?
Mar 21, 2025 pm 06:46 PM
この記事では、numpy、pandas、matplotlib、scikit-learn、tensorflow、django、flask、and requestsなどの人気のあるPythonライブラリについて説明し、科学的コンピューティング、データ分析、視覚化、機械学習、Web開発、Hの使用について説明します。
 文字列を介してオブジェクトを動的に作成し、Pythonでメソッドを呼び出す方法は?
Apr 01, 2025 pm 11:18 PM
文字列を介してオブジェクトを動的に作成し、Pythonでメソッドを呼び出す方法は?
Apr 01, 2025 pm 11:18 PM
Pythonでは、文字列を介してオブジェクトを動的に作成し、そのメソッドを呼び出す方法は?これは一般的なプログラミング要件です。特に構成または実行する必要がある場合は...
