

Linux rootfs を構築する方法を段階的に説明します。

ビジーボックスの概要
ご存知のとおり、Linux 環境ではすべてがファイルであり、ファイルはすべてを表すことができます。ファイル システムは、これらの共通コンポーネントの集合です。組み込み分野では、ファイルシステムの構築にbusyboxをベースに構築されたrootfsがよく使われます。
busybox は 20 年近く前から存在しており、現在では組み込み業界で主流の rootfs 構築ツールとなっています。
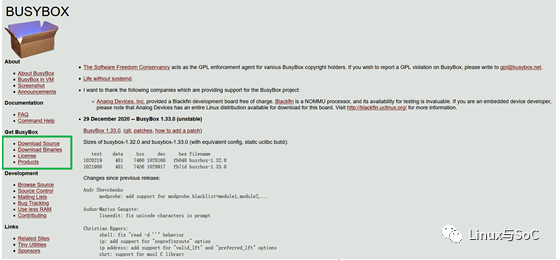
busybox のコードは完全にオープンソースです。公式 Web サイトに入り、「Get BusyBox」の下の「Download Source」をクリックして、ソースコードのダウンロードインターフェイスに入ることができます。
#「」
公式ウェブサイトのリンク:https://busybox.net/
」
 #2.busybox の設定とコンパイル
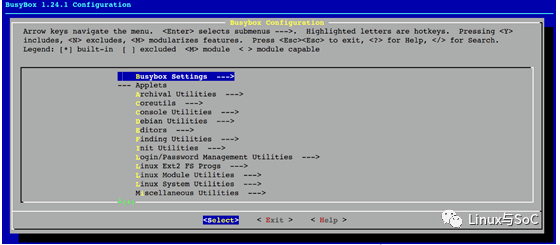
#2.busybox の設定とコンパイルソース コードをダウンロードした後、ソース コードをコンパイル環境にコピーします。コンパイル前に Busybox を構成する必要があります。これには主に 3 つの側面が関係します:
\1. コンパイル ツール チェーンの設定
\2.コンパイルモードの設定
\3. ファイルシステムがサポートする機能
最初の 2 つの項目は完了する必要がありますが、3 番目の点はユーザー自身のニーズに応じて策定されます。
make menuconfig を実行して、設定インターフェイスに入ります。
 コンパイル ツール チェーンの設定
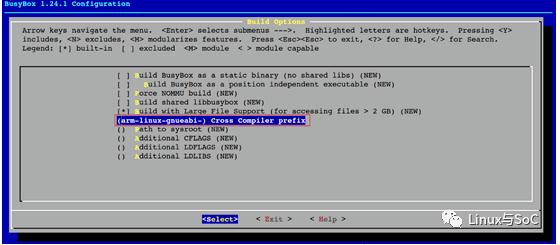
コンパイル ツール チェーンの設定設定されたクロスコンパイル ツール チェーンは、カーネル コンパイルに使用されるツール チェーンと同じである必要があります。たとえば、クロスコンパイル ツール チェーンが arm-linux-gnueabi- に設定されている場合は、設定するビルド オプションを入力します。それ。
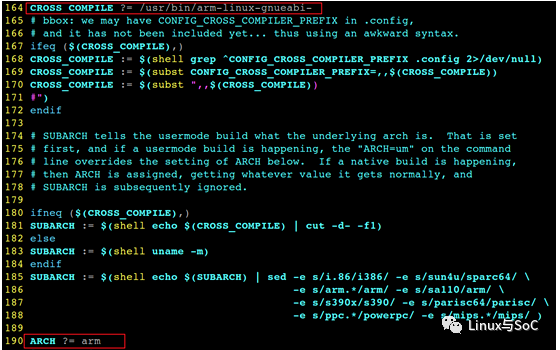
 もちろん、ルート ディレクトリに Makefile ファイルを入力して、対応するクロスコンパイル ツール チェーンとプラットフォーム情報を変更することもできます。
もちろん、ルート ディレクトリに Makefile ファイルを入力して、対応するクロスコンパイル ツール チェーンとプラットフォーム情報を変更することもできます。
コンパイルされたイメージ ファイルが静的か動的かを設定します。動的にコンパイルされる場合は、クロスコンパイル ツール チェーンの下の lib ライブラリを最終的な _install フォルダーに手動でコピーする必要があります (逆も同様)。静的コンパイルの構成は以下の通りですが、括弧内のプロンプトには共有ライブラリが含まれていないことがわかります。このオプションが有効になっていない場合、コンパイル方法は動的になります。
 **rootfs でサポートされている関数を設定します
**rootfs でサポートされている関数を設定します
**
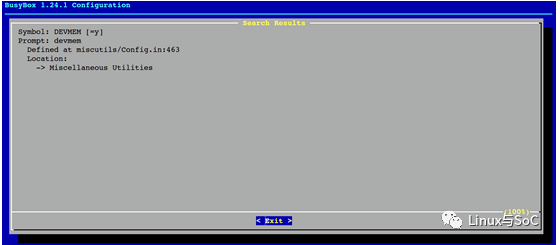
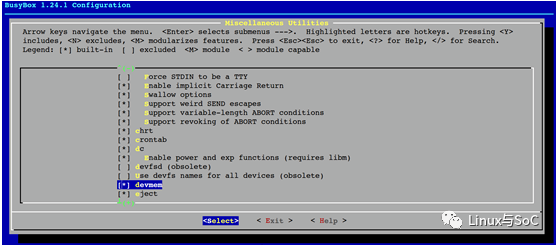
busybox は、何百ものコマンド ラインとその他の機能をサポートしており、必要に応じて増減できます。たとえば、devmem コマンド ラインを追加する場合は、対応する有効化ボックスをオンにします。
############コンパイル######make と make install を実行すると、コンパイル パスに _install フォルダーが生成され、bin、sbin、usr などのファイルが含まれます。追加したばかりの devmem コマンドを確認し、コンパイルされていることを確認します。
 このとき、busybox 配下にコンパイルされた _install を rootfs の基本フレームワークとしてコピーし、その他必要なコンポーネントを追加します。
このとき、busybox 配下にコンパイルされた _install を rootfs の基本フレームワークとしてコピーし、その他必要なコンポーネントを追加します。 3. rootfs のビルド
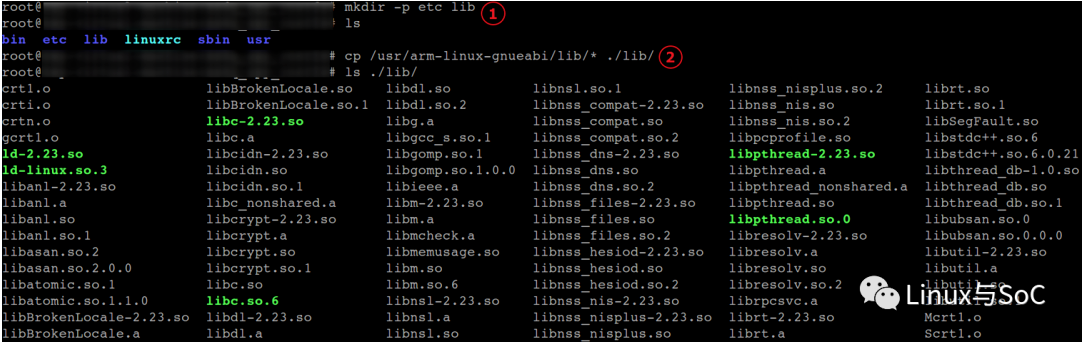
 _install の下にあるすべてのファイルをコピーして lib フォルダーと etc フォルダーを作成し、クロスコンパイル ツール チェーン arm-linux-gnueabi の下にある lib ライブラリを作成した lib フォルダーにコピーします。
_install の下にあるすべてのファイルをコピーして lib フォルダーと etc フォルダーを作成し、クロスコンパイル ツール チェーン arm-linux-gnueabi の下にある lib ライブラリを作成した lib フォルダーにコピーします。
次に、home、opt、run、sys、var、boot、dev、media、proc、tmp、usr
を作成します。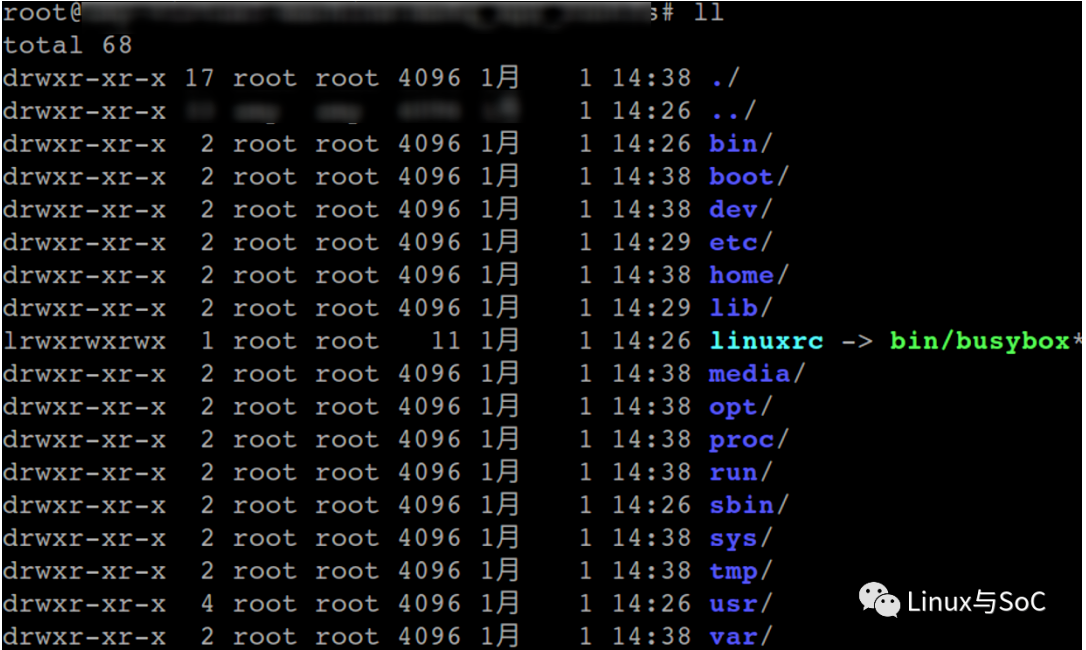
etc ディレクトリの構成
- fstab ファイルを作成します

- inittab ファイルを作成します
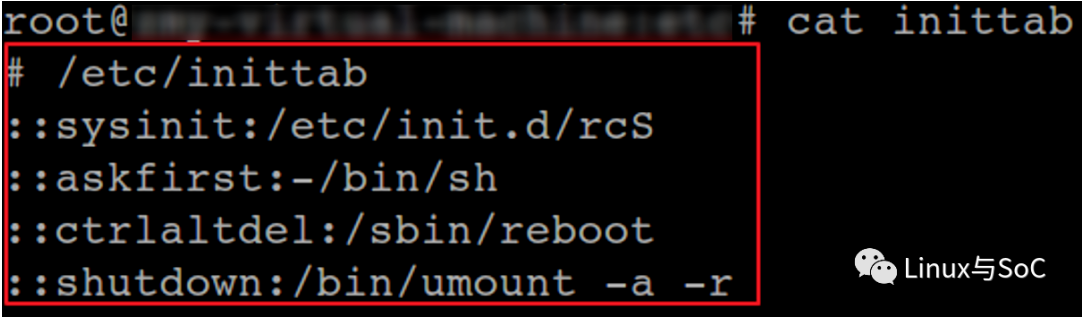
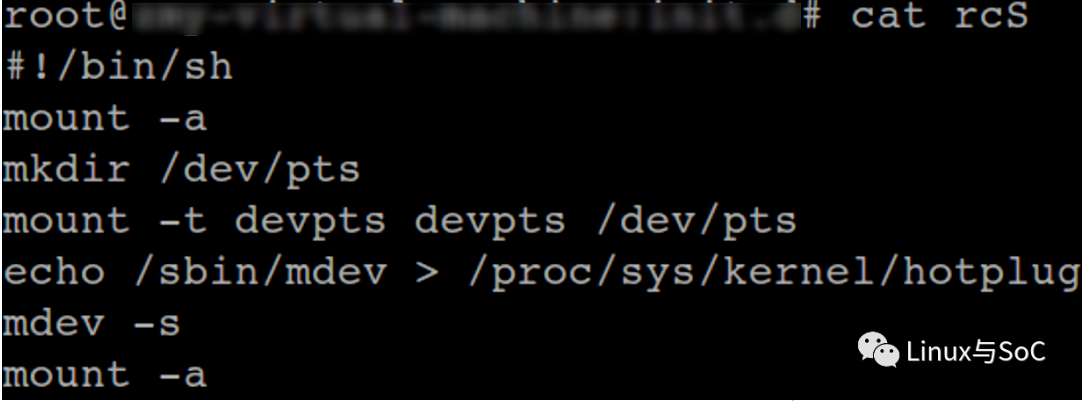
- rcS ファイルの作成
rcS ファイルを作成する前に、etc ディレクトリに init.d フォルダーを手動で作成し、その init.d フォルダーに rcS を作成する必要があります。
この時点で、次のコマンドを実行して、軽量の rootfs をパッケージ化して生成します。
リーリー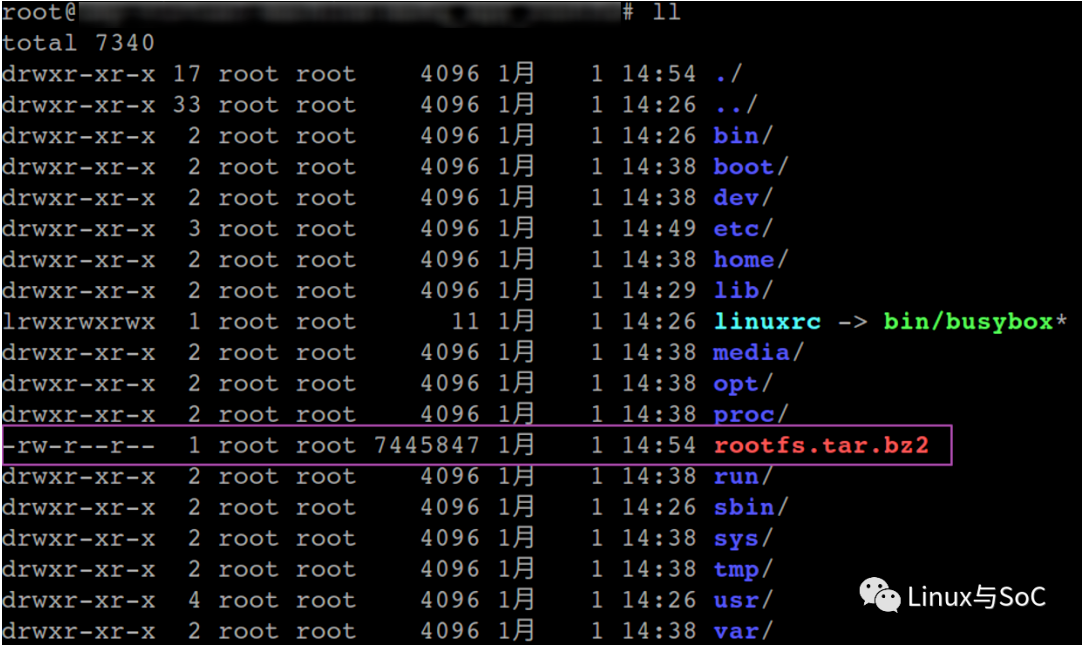
4. ファイル システムの検証
mfgtools を使用して圧縮された rootfs.tar.bz2 を mmc にダウンロードし、システムを再起動すると、作成されたルート ファイル システムが正常に動作し、前に追加した devmem コマンドも正常に実行できることがわかります。

以上がLinux rootfs を構築する方法を段階的に説明します。の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 1655
1655
 14
1414
52
1307
25
1253
29
1228
24
14
1414
52
1307
25
1253
29
1228
24

 Linuxアーキテクチャ:5つの基本コンポーネントを発表します
Apr 20, 2025 am 12:04 AM
Linuxアーキテクチャ:5つの基本コンポーネントを発表します
Apr 20, 2025 am 12:04 AM
Linuxシステムの5つの基本コンポーネントは次のとおりです。1。Kernel、2。Systemライブラリ、3。Systemユーティリティ、4。グラフィカルユーザーインターフェイス、5。アプリケーション。カーネルはハードウェアリソースを管理し、システムライブラリは事前コンパイルされた機能を提供し、システムユーティリティはシステム管理に使用され、GUIは視覚的な相互作用を提供し、アプリケーションはこれらのコンポーネントを使用して機能を実装します。
 vscode端子使用チュートリアル
Apr 15, 2025 pm 10:09 PM
vscode端子使用チュートリアル
Apr 15, 2025 pm 10:09 PM
VSCODEビルトインターミナルは、エディター内でコマンドとスクリプトを実行して開発プロセスを簡素化できるようにする開発ツールです。 VSCODE端子の使用方法:ショートカットキー(CTRL/CMD)で端子を開きます。コマンドを入力するか、スクリプトを実行します。 Hotkeys(Ctrl Lなどの端子をクリアするなど)を使用します。作業ディレクトリ(CDコマンドなど)を変更します。高度な機能には、デバッグモード、自動コードスニペット完了、およびインタラクティブコマンド履歴が含まれます。
 GITの倉庫アドレスを確認する方法
Apr 17, 2025 pm 01:54 PM
GITの倉庫アドレスを確認する方法
Apr 17, 2025 pm 01:54 PM
gitリポジトリアドレスを表示するには、次の手順を実行します。1。コマンドラインを開き、リポジトリディレクトリに移動します。 2。「git remote -v」コマンドを実行します。 3.出力と対応するアドレスでリポジトリ名を表示します。
 Apr 16, 2025 pm 07:39 PM
Apr 16, 2025 pm 07:39 PM
NotePadはJavaコードを直接実行することはできませんが、他のツールを使用することで実現できます。コマンドラインコンパイラ(Javac)を使用してByteCodeファイル(filename.class)を生成します。 Javaインタープリター(Java)を使用して、バイトコードを解釈し、コードを実行し、結果を出力します。
 VSCODE端子コマンドは使用できません
Apr 15, 2025 pm 10:03 PM
VSCODE端子コマンドは使用できません
Apr 15, 2025 pm 10:03 PM
VSコード端末コマンドの原因とソリューションは使用できません:必要なツールはインストールされていません(Windows:WSL; MACOS:XCODE LINEツール)パス構成が間違っています(パス環境変数に実行可能ファイルを追加)許可問題(管理者としてのコードの実行)ファイアウォールまたはプロキシ制限制限(チェック設定、無制限) (再インストールまたは更新)端子構成は互換性がありません(異なる端子タイプまたはコマンドを試してください)特定の環境変数が欠落しています(必要な環境変数を設定します)
 Linuxの主な目的は何ですか?
Apr 16, 2025 am 12:19 AM
Linuxの主な目的は何ですか?
Apr 16, 2025 am 12:19 AM
Linuxの主な用途には、1。Serverオペレーティングシステム、2。EmbeddedSystem、3。Desktopオペレーティングシステム、4。開発およびテスト環境。 Linuxはこれらの分野で優れており、安定性、セキュリティ、効率的な開発ツールを提供します。
 VSCODE前の次のショートカットキー
Apr 15, 2025 pm 10:51 PM
VSCODE前の次のショートカットキー
Apr 15, 2025 pm 10:51 PM
VSコードワンステップ/次のステップショートカットキー使用法:ワンステップ(後方):Windows/Linux:Ctrl←; macOS:CMD←次のステップ(フォワード):Windows/Linux:Ctrl→; macOS:CMD→
 コードを書いた後に崇高に実行する方法
Apr 16, 2025 am 08:51 AM
コードを書いた後に崇高に実行する方法
Apr 16, 2025 am 08:51 AM
Sublimeでコードを実行するには6つの方法があります。ホットキー、メニュー、ビルドシステム、コマンドライン、デフォルトビルドシステムの設定、カスタムビルドコマンド、プロジェクト/ファイルを右クリックして個々のファイル/プロジェクトを実行します。ビルドシステムの可用性は、崇高なテキストのインストールに依存します。
