

Linux デバイス ドライバー プラットフォーム: 組み込みデバイスを記述および管理する簡単な方法

Linux で組み込みデバイス用のドライバーを作成する方法を考えたことはありますか? Linux のさまざまなハードウェア プラットフォームやアーキテクチャにドライバーを適応させる方法を考えたことはありますか?ドライバーでホットプラグ、電源管理、デバイス共有などの高度な機能を Linux システムに実装できるようにする方法を考えたことはありますか?これらの問題に興味がある場合は、この記事でこれらの目標を達成するための効果的な方法である Linux デバイス ドライバー プラットフォームを紹介します。プラットフォームとは、組み込みデバイスを記述するためのデータ構造で、組み込みデバイスの情報と属性をシンプルかつ統一された方法でカーネルに渡し、デバイスの識別とドライバーを実現します。プラットフォームはハードウェアの独立性を実現するためのメカニズムでもあり、組み込みデバイスの構成と管理をドライバー コードから柔軟かつ移植可能な方法で分離できるため、マルチプラットフォームのサポートが実現します。プラットフォームは高度な機能を実装するためのフレームワークでもあり、さまざまな組み込み機器のインターフェースやプロトコルを標準的かつ汎用的に定義して利用することができ、ホットプラグ、電源管理、デバイス共有などを実現する機能です。この記事では、プラットフォームの基本概念、文法規則、記述方法、登録プロセス、マッチング方法などから、Linux デバイス ドライバーにおけるプラットフォームの用途と役割を詳しく紹介し、この便利で強力な方法をマスターするのに役立ちます。
Linux デバイス モデルによると、通常、実際の Linux デバイスとドライバーをバスに接続する必要があります。PCI、USB などに接続されているデバイスの場合、これは当然問題ではありませんが、組み込みシステムの内部では、SoC システムに統合された独立したペリフェラル コントローラーおよび SoC メモリ空間に実装されたペリフェラルは、このタイプのバスには接続されません。このような背景に基づいて、Linux はプラットフォーム バスと呼ばれる仮想バスを設計し、対応するデバイスは platform_device と呼ばれ、ドライバーは platform_driver と呼ばれます。
設計の目的
-
対応機種
リーリー -
BSP とドライバーの分離
リーリー
ソフトウェア アーキテクチャ
カーネル内のプラットフォーム デバイスの実装は、/linux/platform_device.h および drivers/base/platform.c の 2 つのファイルにあります。そのソフトウェア アーキテクチャは次のとおりです: 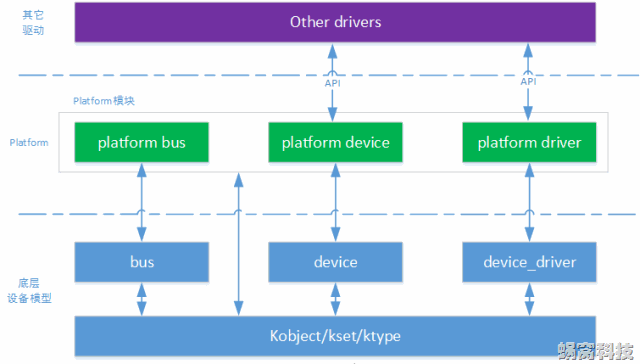
図からわかるように、カーネル内のプラットフォーム デバイスの実装には主に 3 つの部分が含まれています。
-
プラットフォーム バスは、基盤となるバス モジュールに基づいて、プラットフォーム デバイスをマウントするための仮想プラットフォーム バスを抽象化します。
- プラットフォーム デバイスは、基礎となるデバイス モジュールに基づいてプラットフォーム デバイスを抽象化し、プラットフォーム デバイスを表すために使用されます。 プラットフォーム ドライバーは、基礎となる device_driver モジュールに基づいてプラットフォーム ドライバーを抽象化し、プラットフォーム デバイスを駆動するために使用されます。
- プラットフォームデバイス
いわゆる platform_device は、キャラクター デバイス、ブロック デバイス、ネットワーク デバイスと並ぶ概念ではなく、Linux システムによって提供される追加の手段であることに注意してください。たとえば、S3C2440 プロセッサでは、内部に統合された I2C、RTC、SPI 、LCD、ウォッチドッグ、その他のコントローラーはすべて platform_device としてまとめられ、それら自体がキャラクター デバイスです。
リーリー ヒント: ボード レベルに密接に関連するリソースの説明は、dev.paltform_data に配置されます。
paltform_driver
platform_driver这个结构体中包含probe()、remove()、shutdown()、suspend()、resume()函数,通常也需要由驱动实现:
struct platform_driver {
int (*probe)(struct platform_device *);
int (*remove)(struct platform_device *);
void (*shutdown)(struct platform_device *);
int (*suspend)(struct platform_device *, pm_message_t state);
int (*suspend_late)(struct platform_device *, pm_message_t state);
int (*resume_early)(struct platform_device *);
int (*resume)(struct platform_device *);
struct device_driver driver;
};
#include
int platform_driver_register(struct platform_driver *);
void platform_driver_unregister(struct platform_driver *);
platform_bus
系统中为platform总线定义了一个bus_type的实例platform_bus_type:
struct bus_type platform_bus_type = {
.name = "platform",
.dev_attrs = platform_dev_attrs,
.match = platform_match,
.uevent = platform_uevent,
.pm = PLATFORM_PM_OPS_PTR,
};
EXPORT_SYMBOL_GPL(platform_bus_type);
这里要重点关注其 match()成员函数,正是此成员函数确定了 platform_device 和 platform_driver之间如何匹配:
static int platform_match(struct device *dev, struct device_driver *drv)
{
struct platform_device *pdev;
pdev = container_of(dev, struct platform_device, dev);
return (strncmp(pdev->name, drv->name, BUS_ID_SIZE) == 0);
}
通过本文,我们了解了platform在Linux设备驱动中的应用和作用,学习了如何编写、注册、匹配、修改和调试platform。我们发现,platform是一种非常适合嵌入式系统开发的方法,它可以让我们方便地描述和管理嵌入式设备,实现硬件无关性和高级功能。当然,platform也有一些注意事项和限制,比如需要遵循语法规范、需要注意兼容性问题、需要注意内存占用和性能影响等。因此,在使用platform时,我们需要有一定的硬件知识和经验,以及良好的编程习惯和调试技巧。希望本文能够为你提供一个入门级的指导,让你对platform有一个初步的认识和理解。如果你想深入学习platform,建议你参考更多的资料和示例,以及自己动手实践和探索。
以上がLinux デバイス ドライバー プラットフォーム: 組み込みデバイスを記述および管理する簡単な方法の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7569
7569
 15
1386
52
87
11
28
107
15
1386
52
87
11
28
107

 CentosとUbuntuの違い
Apr 14, 2025 pm 09:09 PM
CentosとUbuntuの違い
Apr 14, 2025 pm 09:09 PM
Centosとubuntuの重要な違いは次のとおりです。起源(CentosはRed Hat、for Enterprises、UbuntuはDebianに由来します。個人用のDebianに由来します)、パッケージ管理(CentosはYumを使用し、安定性に焦点を当てます。チュートリアルとドキュメント)、使用(Centosはサーバーに偏っています。Ubuntuはサーバーやデスクトップに適しています)、その他の違いにはインストールのシンプルさが含まれます(Centos is Thin)
 Dockerデスクトップの使用方法
Apr 15, 2025 am 11:45 AM
Dockerデスクトップの使用方法
Apr 15, 2025 am 11:45 AM
Dockerデスクトップの使用方法は? Dockerデスクトップは、ローカルマシンでDockerコンテナを実行するためのツールです。使用する手順には次のものがあります。1。Dockerデスクトップをインストールします。 2。Dockerデスクトップを開始します。 3。Docker Imageを作成します(DockerFileを使用); 4. Docker画像をビルド(Docker Buildを使用); 5。Dockerコンテナを実行します(Docker Runを使用)。
 Centosをインストールする方法
Apr 14, 2025 pm 09:03 PM
Centosをインストールする方法
Apr 14, 2025 pm 09:03 PM
Centosのインストール手順:ISO画像をダウンロードし、起動可能なメディアを燃やします。起動してインストールソースを選択します。言語とキーボードのレイアウトを選択します。ネットワークを構成します。ハードディスクをパーティション化します。システムクロックを設定します。ルートユーザーを作成します。ソフトウェアパッケージを選択します。インストールを開始します。インストールが完了した後、ハードディスクから再起動して起動します。
 メンテナンスを停止した後のCentosの選択
Apr 14, 2025 pm 08:51 PM
メンテナンスを停止した後のCentosの選択
Apr 14, 2025 pm 08:51 PM
Centosは廃止されました、代替品には次のものが含まれます。1。RockyLinux(最高の互換性)。 2。アルマリン(Centosと互換性); 3。Ubuntuサーバー(設定が必要); 4。RedHat Enterprise Linux(コマーシャルバージョン、有料ライセンス); 5。OracleLinux(CentosとRhelと互換性があります)。移行する場合、考慮事項は次のとおりです。互換性、可用性、サポート、コスト、およびコミュニティサポート。
 Dockerプロセスを表示する方法
Apr 15, 2025 am 11:48 AM
Dockerプロセスを表示する方法
Apr 15, 2025 am 11:48 AM
Dockerプロセス表示方法:1。DockerCLIコマンド:Docker PS; 2。SystemDCLIコマンド:SystemCTL Status Docker; 3。CLIコマンドを作成するDocker:Docker-Compose PS。 4。プロセスエクスプローラー(Windows); 5。 /procディレクトリ(Linux)。
 Docker画像が失敗した場合はどうすればよいですか
Apr 15, 2025 am 11:21 AM
Docker画像が失敗した場合はどうすればよいですか
Apr 15, 2025 am 11:21 AM
障害のあるDocker画像ビルドのトラブルシューティング手順:DockerFileの構文と依存関係バージョンを確認します。ビルドコンテキストに必要なソースコードと依存関係が含まれているかどうかを確認します。エラーの詳細については、ビルドログを表示します。 -targetオプションを使用して、階層フェーズを構築して障害点を識別します。 Dockerエンジンの最新バージョンを使用してください。 -t [image-name]:デバッグモードで画像を作成して、問題をデバッグします。ディスクスペースを確認し、十分であることを確認してください。 Selinuxを無効にして、ビルドプロセスへの干渉を防ぎます。コミュニティプラットフォームに助けを求め、DockerFilesを提供し、より具体的な提案のためにログの説明を作成します。
 Dockerの原則の詳細な説明
Apr 14, 2025 pm 11:57 PM
Dockerの原則の詳細な説明
Apr 14, 2025 pm 11:57 PM
DockerはLinuxカーネル機能を使用して、効率的で孤立したアプリケーションランニング環境を提供します。その作業原則は次のとおりです。1。ミラーは、アプリケーションを実行するために必要なすべてを含む読み取り専用テンプレートとして使用されます。 2。ユニオンファイルシステム(UnionFS)は、違いを保存するだけで、スペースを節約し、高速化する複数のファイルシステムをスタックします。 3.デーモンはミラーとコンテナを管理し、クライアントはそれらをインタラクションに使用します。 4。名前空間とcgroupsは、コンテナの分離とリソースの制限を実装します。 5.複数のネットワークモードは、コンテナの相互接続をサポートします。これらのコア概念を理解することによってのみ、Dockerをよりよく利用できます。
 VSCODEに必要なコンピューター構成
Apr 15, 2025 pm 09:48 PM
VSCODEに必要なコンピューター構成
Apr 15, 2025 pm 09:48 PM
VSコードシステムの要件:オペレーティングシステム:オペレーティングシステム:Windows 10以降、MACOS 10.12以上、Linux Distributionプロセッサ:最小1.6 GHz、推奨2.0 GHz以上のメモリ:最小512 MB、推奨4 GB以上のストレージスペース:最低250 MB以上:その他の要件を推奨:安定ネットワーク接続、XORG/WAYLAND(Linux)
