

数行のコードで UNet を安定化! 中山大学などが ScaleLong 普及モデルを提案: Scaling の疑問から Scaling になるまで

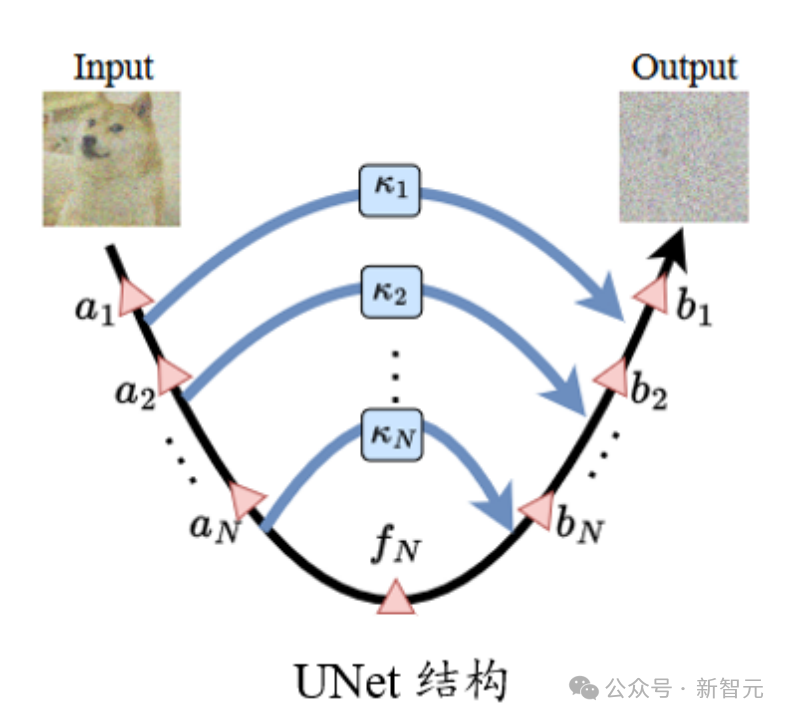
標準的な UNet 構造では、ロング スキップ接続のスケーリング係数  は通常 1 です。
は通常 1 です。
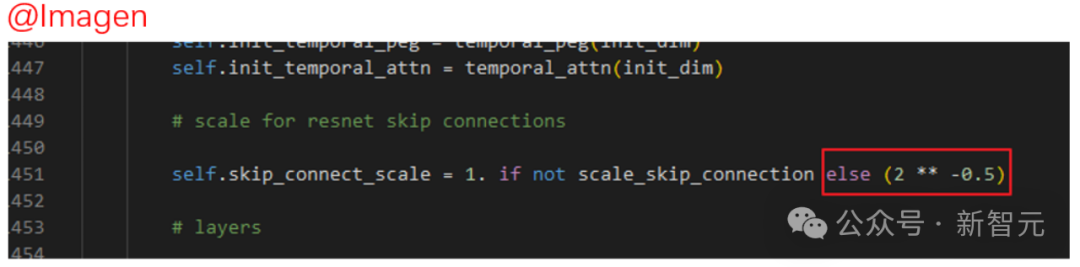
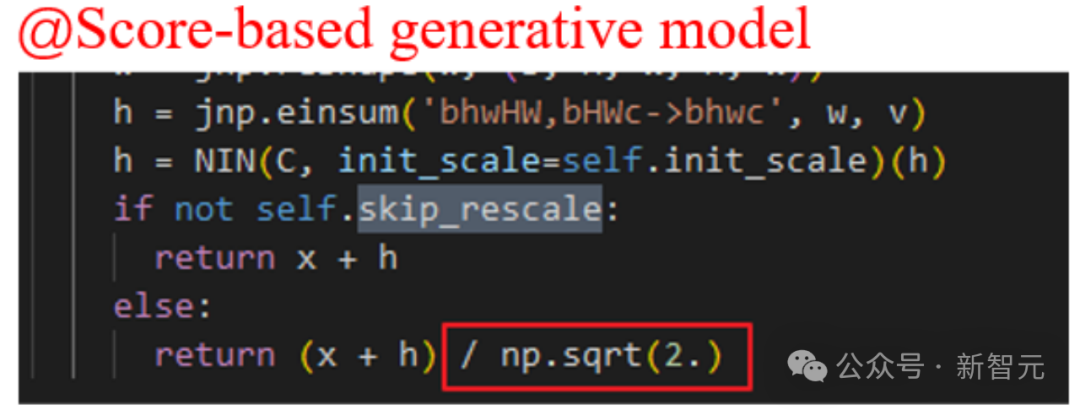
ただし、Imagen、スコアベースの生成モデル、SR3 などの一部のよく知られた拡散モデルの作品では、すべて  ## が設定されています。 # 、そのような設定により拡散モデルのトレーニングを効果的に加速できることがわかりました。
## が設定されています。 # 、そのような設定により拡散モデルのトレーニングを効果的に加速できることがわかりました。
 質問のスケーリング
質問のスケーリング
まず第一に、この種の経験的な表示では、この設定がどのような役割を果たしているのかがわかりにくくなります。
また、
しか設定できないのか、それとも他の定数を使用できるのかもわかりません。 
著者はこれについて多くの質問をしています...
写真 理解スケーリング
理解スケーリング
さらに、UNet 構造の特殊性により、浅いフィーチャは長いスキップ接続を通じて深い位置に接続されるため、勾配消失などの問題がさらに回避されます。
では、逆に考えてみると、このような構造に注意しないと、アップデートによる過度の勾配やパラメータ(特徴量)の発振などの問題が発生するのでしょうか?
#写真
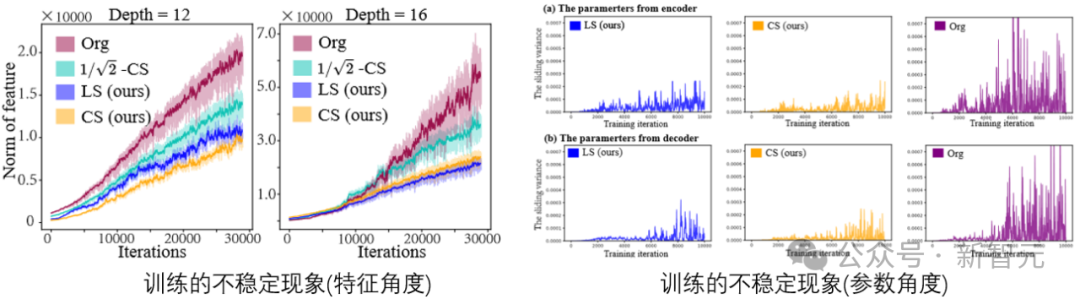 #トレーニング プロセス中に拡散モデル タスクの特性とパラメーターを視覚化すると、次のことがわかります。確かに不安定現象は存在します。
#トレーニング プロセス中に拡散モデル タスクの特性とパラメーターを視覚化すると、次のことがわかります。確かに不安定現象は存在します。
パラメータ (特徴) の不安定性は勾配に影響し、それがパラメータの更新にも影響します。結局のところ、このプロセスには、パフォーマンスに望ましくない干渉が発生するリスクが大きくなります。したがって、この不安定性を制御する方法を見つける必要があります。
さらに、拡散モデルについて。 UNet の入力はノイズを含む画像であり、モデルが追加されたノイズを正確に予測する必要がある場合、追加の外乱に対する入力に対する強力なロバスト性がモデルに必要になります。
論文: https://arxiv.org/abs/2310.13545
定理 3.1 から、中間層の特徴の振動範囲 (上限と下限の幅) は、スケーリング係数の二乗の合計に直接関係します。適切なスケーリング係数は、機能の不安定性を軽減するのに役立ちます。
ただし、スケーリング係数を直接 0 に設定すると、ショックは実際に最適に緩和されることに注意してください。 (手動ドッグヘッド)
しかし、UNet がスキップのない状況に劣化すると、不安定性の問題は解決されますが、表現能力も失われます。これは、モデルの安定性と表現機能の間のトレードオフです。
 写真
写真
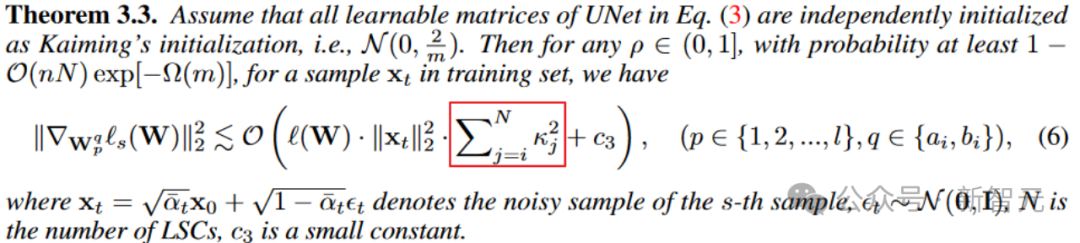
同様に、パラメータ勾配の観点から。定理 3.3 は、スケーリング係数が勾配の大きさを制御することも示しています。
 図
図
さらに、定理 3.4 は、ロング スキップ接続のスケーリングが入力外乱に対するモデルのロバスト性に影響を与える可能性があることも示しています。入力外乱に対する拡散モデルの安定性が向上する境界。
スケーリングになる
上記の分析を通じて、安定したモデル トレーニングのためのロング スキップ接続でのスケーリングの重要性を理解しました。  は上記の分析にも当てはまります。
は上記の分析にも当てはまります。
次に、どのような種類のスケーリングがパフォーマンスを向上できるかを分析します。結局のところ、上記の分析は、スケーリングが適切であることを示すだけであり、どのような種類のスケーリングであるかを判断することはできません。最高かそれ以上、良いです。
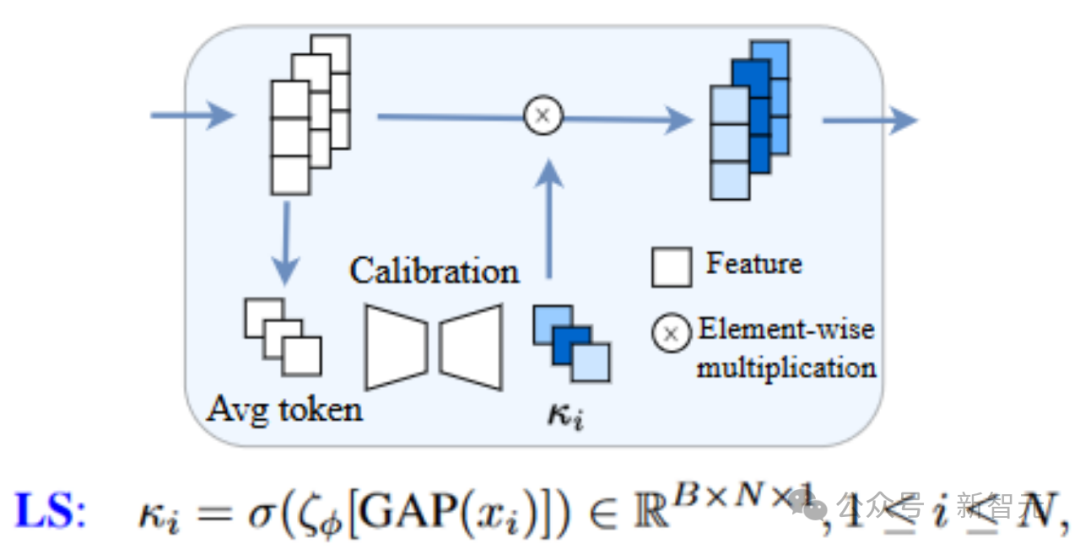
簡単な方法としては、ロングスキップ接続に学習可能なモジュールを導入し、適応的にスケーリングを調整する方法をLearnable Scaling (LS)法と呼びます。以下に示すように、SENet のような構造を使用します (ここで考慮されている U-ViT 構造は、非常によく組織されています!)
 Picture
Picture
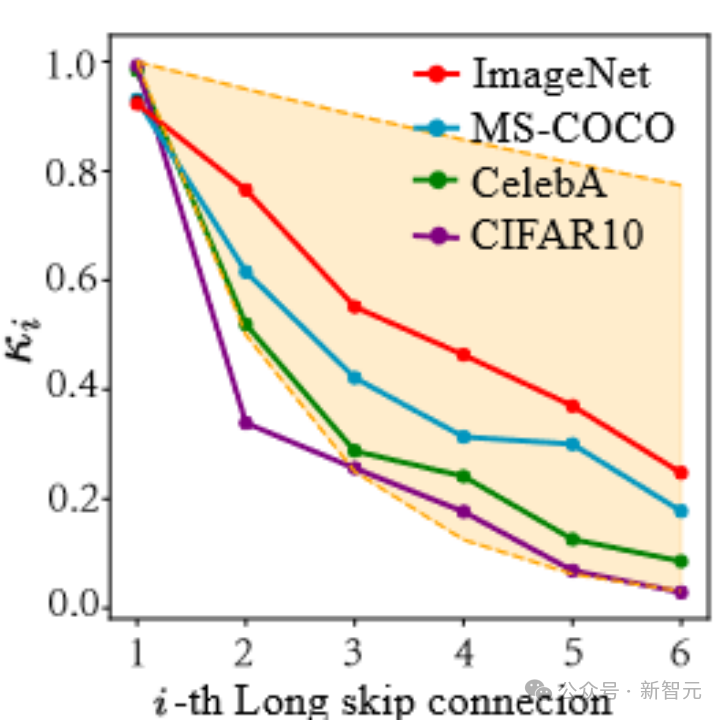
この記事の結果から判断すると、LS は確かに拡散モデルのトレーニングを効果的に安定させることができます。さらに、LS で学習した係数の可視化を試みます。
下の図に示すように、これらの係数は指数関数的な下降傾向を示していることがわかります (ここでの最初のロング スキップ接続は、UNet の最初の端と最後の端を接続する接続を指すことに注意してください)。係数がほぼYu 1に近く、この現象もすごいですね!
 写真
写真
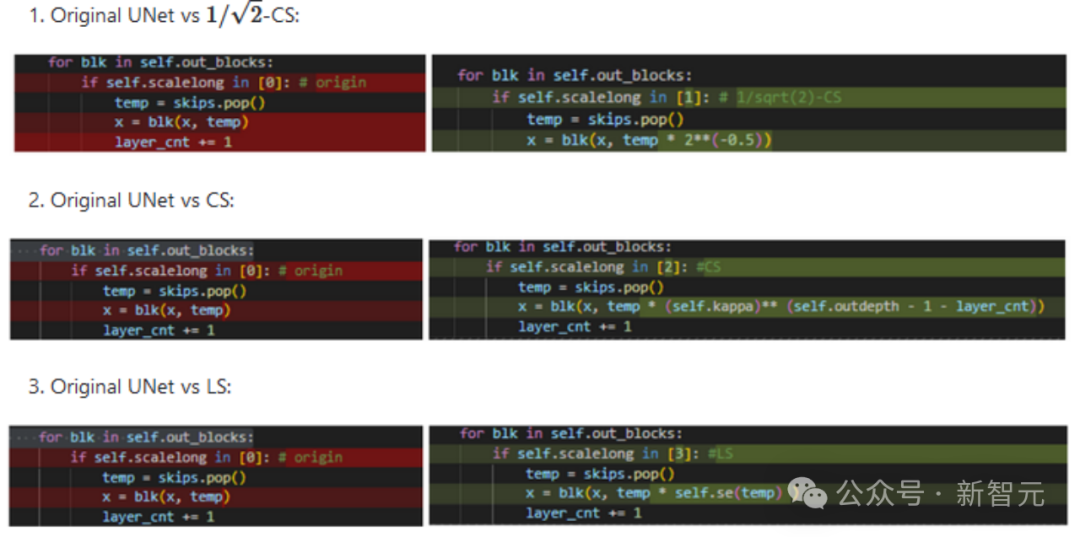
この一連の観察に基づいて (詳細については論文を参照してください)、私たちはさらに Constant Scaling (CS) を提案しました。 ) メソッド、つまり、学習可能なパラメータは必要ありません:

CS 戦略は、次を使用した元のスケーリング操作と同じです。 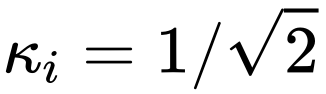 追加のパラメーターを使用しないため、追加の計算コストはほとんどかかりません。
追加のパラメーターを使用しないため、追加の計算コストはほとんどかかりません。
安定したトレーニングでは、ほとんどの場合、CS は LS ほどパフォーマンスが良くありませんが、既存の  戦略を試してみる価値はあります。
戦略を試してみる価値はあります。
上記の CS と LS の実装は非常に簡単で、必要なコードは数行だけです。各 (hua) 式 (li) および各 (hu) タイプ (shao) の UNet 構造について、フィーチャーの次元を調整する必要がある場合があります。 (手動ドッグヘッド 1)
最近、FreeU、SCEdit などのフォローアップ作業でも、スキップ接続でのスケーリングの重要性が明らかになりました。
以上が数行のコードで UNet を安定化! 中山大学などが ScaleLong 普及モデルを提案: Scaling の疑問から Scaling になるまでの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7318
7318
 9
1625
14
1349
46
1261
25
1209
29
9
1625
14
1349
46
1261
25
1209
29

 オープンソース!ゾーイデプスを超えて! DepthFM: 高速かつ正確な単眼深度推定!
Apr 03, 2024 pm 12:04 PM
オープンソース!ゾーイデプスを超えて! DepthFM: 高速かつ正確な単眼深度推定!
Apr 03, 2024 pm 12:04 PM
0.この記事は何をするのですか?私たちは、多用途かつ高速な最先端の生成単眼深度推定モデルである DepthFM を提案します。従来の深度推定タスクに加えて、DepthFM は深度修復などの下流タスクでも最先端の機能を実証します。 DepthFM は効率的で、いくつかの推論ステップ内で深度マップを合成できます。この作品について一緒に読みましょう〜 1. 論文情報タイトル: DepthFM: FastMonocularDepthEstimationwithFlowMatching 著者: MingGui、JohannesS.Fischer、UlrichPrestel、PingchuanMa、Dmytr
 世界で最も強力なオープンソース MoE モデルが登場。GPT-4 に匹敵する中国語機能を備え、価格は GPT-4-Turbo のわずか 1% 近くです
May 07, 2024 pm 04:13 PM
世界で最も強力なオープンソース MoE モデルが登場。GPT-4 に匹敵する中国語機能を備え、価格は GPT-4-Turbo のわずか 1% 近くです
May 07, 2024 pm 04:13 PM
従来のコンピューティングを超える能力を備えているだけでなく、より低コストでより効率的なパフォーマンスを実現する人工知能モデルを想像してみてください。これは SF ではありません。世界で最も強力なオープンソース MoE モデルである DeepSeek-V2[1] が登場しました。 DeepSeek-V2 は、経済的なトレーニングと効率的な推論の特徴を備えた強力な専門家混合 (MoE) 言語モデルです。これは 236B のパラメータで構成されており、そのうち 21B は各マーカーをアクティブにするために使用されます。 DeepSeek67B と比較して、DeepSeek-V2 はパフォーマンスが優れていると同時に、トレーニング コストを 42.5% 節約し、KV キャッシュを 93.3% 削減し、最大生成スループットを 5.76 倍に高めます。 DeepSeek は一般的な人工知能を研究する会社です
 MLP に代わる KAN は、オープンソース プロジェクトによって畳み込みまで拡張されました
Jun 01, 2024 pm 10:03 PM
MLP に代わる KAN は、オープンソース プロジェクトによって畳み込みまで拡張されました
Jun 01, 2024 pm 10:03 PM
今月初め、MIT やその他の機関の研究者らは、MLP に代わる非常に有望な代替案である KAN を提案しました。 KAN は、精度と解釈可能性の点で MLP よりも優れています。また、非常に少数のパラメーターを使用して、多数のパラメーターを使用して実行する MLP よりも優れたパフォーマンスを発揮できます。たとえば、著者らは、KAN を使用して、より小規模なネットワークと高度な自動化で DeepMind の結果を再現したと述べています。具体的には、DeepMind の MLP には約 300,000 個のパラメーターがありますが、KAN には約 200 個のパラメーターしかありません。 KAN は、MLP が普遍近似定理に基づいているのに対し、KAN はコルモゴロフ-アーノルド表現定理に基づいているのと同様に、強力な数学的基礎を持っています。以下の図に示すように、KAN は
 こんにちは、電気アトラスです!ボストン・ダイナミクスのロボットが復活、180度の奇妙な動きにマスク氏も恐怖
Apr 18, 2024 pm 07:58 PM
こんにちは、電気アトラスです!ボストン・ダイナミクスのロボットが復活、180度の奇妙な動きにマスク氏も恐怖
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas は正式に電動ロボットの時代に突入します!昨日、油圧式アトラスが歴史の舞台から「涙ながらに」撤退したばかりですが、今日、ボストン・ダイナミクスは電動式アトラスが稼働することを発表しました。ボストン・ダイナミクス社は商用人型ロボットの分野でテスラ社と競争する決意を持っているようだ。新しいビデオが公開されてから、わずか 10 時間ですでに 100 万人以上が視聴しました。古い人が去り、新しい役割が現れるのは歴史的な必然です。今年が人型ロボットの爆発的な年であることは間違いありません。ネットユーザーは「ロボットの進歩により、今年の開会式は人間のように見え、人間よりもはるかに自由度が高い。しかし、これは本当にホラー映画ではないのか?」とコメントした。ビデオの冒頭では、アトラスは仰向けに見えるように地面に静かに横たわっています。次に続くのは驚くべきことです
 超知性の生命力が覚醒する!しかし、自己更新 AI の登場により、母親はデータのボトルネックを心配する必要がなくなりました。
Apr 29, 2024 pm 06:55 PM
超知性の生命力が覚醒する!しかし、自己更新 AI の登場により、母親はデータのボトルネックを心配する必要がなくなりました。
Apr 29, 2024 pm 06:55 PM
世界は狂ったように大きなモデルを構築していますが、インターネット上のデータだけではまったく不十分です。このトレーニング モデルは「ハンガー ゲーム」のようであり、世界中の AI 研究者は、データを貪欲に食べる人たちにどのように餌を与えるかを心配しています。この問題は、マルチモーダル タスクで特に顕著です。何もできなかった当時、中国人民大学学部のスタートアップチームは、独自の新しいモデルを使用して、中国で初めて「モデル生成データフィード自体」を実現しました。さらに、これは理解側と生成側の 2 つの側面からのアプローチであり、両方の側で高品質のマルチモーダルな新しいデータを生成し、モデル自体にデータのフィードバックを提供できます。モデルとは何ですか? Awaker 1.0 は、中関村フォーラムに登場したばかりの大型マルチモーダル モデルです。チームは誰ですか?ソフォンエンジン。人民大学ヒルハウス人工知能大学院の博士課程学生、ガオ・イージャオ氏によって設立されました。
 AI が数学研究を破壊する!フィールズ賞受賞者で中国系アメリカ人の数学者が上位 11 件の論文を主導 | テレンス・タオが「いいね!」しました
Apr 09, 2024 am 11:52 AM
AI が数学研究を破壊する!フィールズ賞受賞者で中国系アメリカ人の数学者が上位 11 件の論文を主導 | テレンス・タオが「いいね!」しました
Apr 09, 2024 am 11:52 AM
AI は確かに数学を変えつつあります。最近、この問題に細心の注意を払っている陶哲軒氏が『米国数学協会会報』(米国数学協会会報)の最新号を送ってくれた。 「機械は数学を変えるのか?」というテーマを中心に、多くの数学者が意見を述べ、そのプロセス全体は火花に満ち、ハードコアで刺激的でした。著者には、フィールズ賞受賞者のアクシャイ・ベンカテシュ氏、中国の数学者鄭楽軍氏、ニューヨーク大学のコンピューター科学者アーネスト・デイビス氏、その他業界で著名な学者を含む強力な顔ぶれが揃っている。 AI の世界は劇的に変化しています。これらの記事の多くは 1 年前に投稿されたものです。
 Kuaishou バージョンの Sora「Ke Ling」がテスト用に公開されています。120 秒以上のビデオを生成し、物理学をより深く理解し、複雑な動きを正確にモデル化できます。
Jun 11, 2024 am 09:51 AM
Kuaishou バージョンの Sora「Ke Ling」がテスト用に公開されています。120 秒以上のビデオを生成し、物理学をより深く理解し、複雑な動きを正確にモデル化できます。
Jun 11, 2024 am 09:51 AM
何?ズートピアは国産AIによって実現するのか?ビデオとともに公開されたのは、「Keling」と呼ばれる新しい大規模な国産ビデオ生成モデルです。 Sora も同様の技術的ルートを使用し、自社開発の技術革新を多数組み合わせて、大きく合理的な動きをするだけでなく、物理世界の特性をシミュレートし、強力な概念的結合能力と想像力を備えたビデオを制作します。データによると、Keling は、最大 1080p の解像度で 30fps で最大 2 分の超長時間ビデオの生成をサポートし、複数のアスペクト比をサポートします。もう 1 つの重要な点は、Keling は研究所が公開したデモやビデオ結果のデモンストレーションではなく、ショートビデオ分野のリーダーである Kuaishou が立ち上げた製品レベルのアプリケーションであるということです。さらに、主な焦点は実用的であり、白紙小切手を書かず、リリースされたらすぐにオンラインに移行することです。Ke Ling の大型モデルは Kuaiying でリリースされました。
 アメリカ空軍が初のAI戦闘機を公開し注目を集める!大臣はプロセス全体を通じて干渉することなく個人的にテストを実施し、10万行のコードが21回にわたってテストされました。
May 07, 2024 pm 05:00 PM
アメリカ空軍が初のAI戦闘機を公開し注目を集める!大臣はプロセス全体を通じて干渉することなく個人的にテストを実施し、10万行のコードが21回にわたってテストされました。
May 07, 2024 pm 05:00 PM
最近、軍事界は、米軍戦闘機が AI を使用して完全自動空戦を完了できるようになったというニュースに圧倒されました。そう、つい最近、米軍のAI戦闘機が初めて公開され、その謎が明らかになりました。この戦闘機の正式名称は可変安定性飛行シミュレーター試験機(VISTA)で、アメリカ空軍長官が自ら飛行させ、一対一の空戦をシミュレートした。 5 月 2 日、フランク ケンダル米国空軍長官は X-62AVISTA でエドワーズ空軍基地を離陸しました。1 時間の飛行中、すべての飛行動作が AI によって自律的に完了されたことに注目してください。ケンダル氏は「過去数十年にわたり、私たちは自律型空対空戦闘の無限の可能性について考えてきたが、それは常に手の届かないものだと思われてきた」と語った。しかし今では、
