

見事な! ! ! Tesla のエンドツーエンドのデモビデオ分析

ユーザーが Tesla FSD v12 のビデオをインターネットに投稿し、誰かがそれをサイト B に移動しました:
https://www.bilibili.com/video/BV1Z6421M797www.bilibili .com /video/BV1Z6421M797
今回は、純粋に視覚的に複雑なシーンです。雨が降って地面に水があり、さまざまなパターンが水面に反射し、奇妙な視覚効果を生み出す可能性があります。テスラは昨年、AI Dayイベントを開催しなかったが、その理由としては、競合他社が頻繁にスライドを挑発するため、単に中止したと言われている。詳細は不明ですが、ビデオを見るとエンドツーエンドの機能の一部を垣間見ることができます。次に、興味深い点をいくつか分析してみましょう。
01:57、車のドアが開いていることを誤って検出し、大きく迂回しました:

ここでは大きな問題ではありませんが、問題があります。左側に比較的広いスペースがあるので、少し回っても問題ありません。
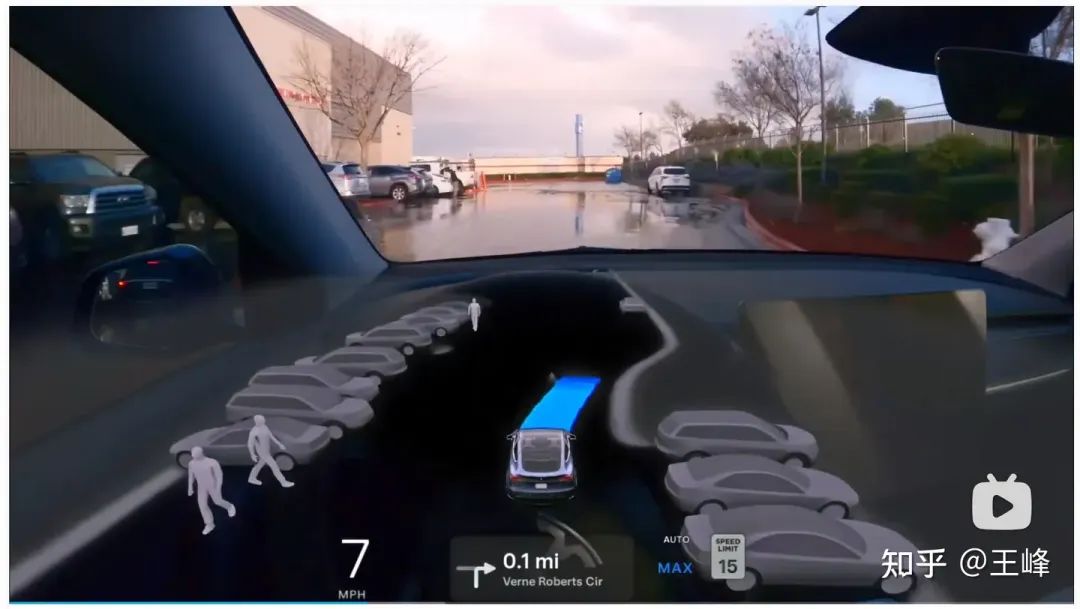
02:09、occ の誤検出によりほぼ停止しました:

歩行者が立ち去ったので、前進を開始できます。しかし、地面には溜まった水が多く、物体の像を反射して誤検知につながる可能性があったため、立ち止まってしばらく待ってから先に進みました。
04:40、近距離カットイン車両は見逃されました


#超近距離後退カットイン車両がオンでした左側を見逃しました。しかし、計画には開始の意図がないようです。これはエンドツーエンドの大きな利点を反映しています。上流のエラーの結果が必ずしも間違った運転行動につながるわけではありません。同様の例がさらに増えるでしょう。後で。
05:37 occ の誤検出

これは、地面に水が溜まったことによっても引き起こされる可能性があります。この結果は受け入れられました。 -端から左、右 ハンドルをランダムに、時には左に、時には右に回します。
05:48、左右の至近距離でoccの誤検出

左側と右側の非常に近い位置でoccの誤検出があります。そうです。まだルールに従って書いているのであれば、可能かもしれません。乗っ取りのために報告する必要があります (必ずしも走行コース上にあるわけではありません)。ここでは、2 つの OCC はエンドツーエンドで無視されますそして運転を続けます。
06:57、真正面の至近距離で歩行者を誤検出

これは本当にすごいです、歩行者が顔に映ります、すべてのルール-based この時点で制御システムは確実に急ブレーキ警報を発しますが、エンドツーエンドモデルは上流の結果を認識せず、通常どおり運転を続けます。
14 点: 専用駐車場で徘徊し、出られなくなる
#これは BEV の感知距離不足の問題である可能性があります。長い間見つからないので、車を出て駐車場の周りをぐるっと一周する。 。
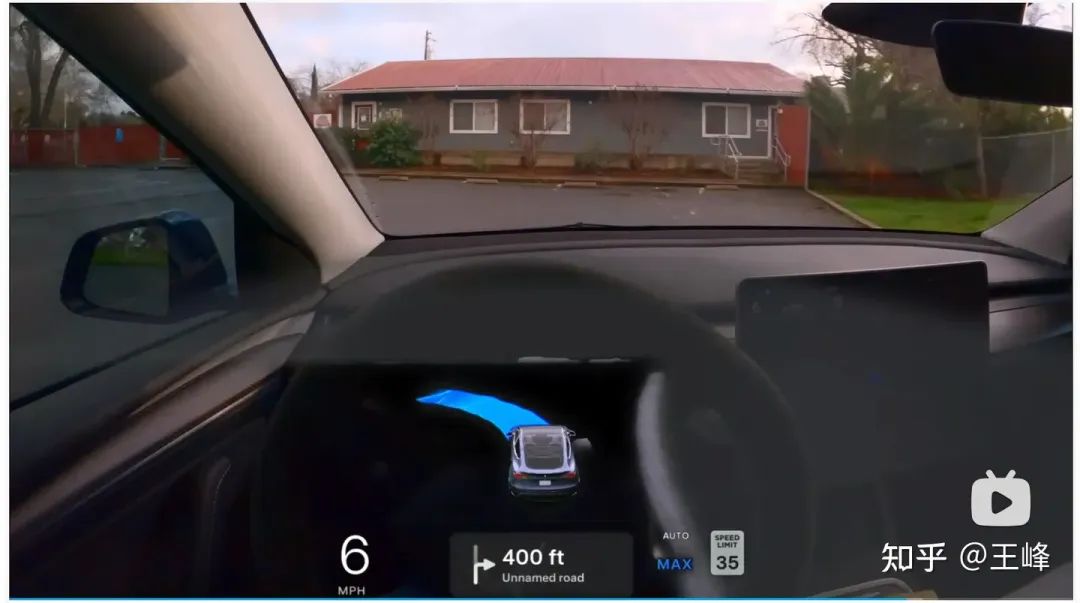
他のクリップは幹線道路での走行に関するものです。幹線道路では、FSD v12 のパフォーマンスは非常にスムーズで、大きな問題はありません。特に夜間の車線境界線の検出も非常に優れています。安定していますが、これは大きな問題だと思いますし、メーカーによってはこのレベルに達しているところもあるので、ここでは触れません。
駐車場のセクションだけを見ると、上流の結果を見ずに、ハンドルが左右に切れる原因となったフロント OCC の誤検出を除いて、FSD の軌跡v12はまだ比較的スムーズで、エラーはあっても固まることはありません。歩行者、不規則に動く障害物 (トロリー)、地面に水があるようなシーンでは、パフォーマンスは確かに問題ありません。
Tesla は依然として中間モジュール監視によるエンドツーエンドのマルチタスクを使用しているため、フロントエンドは引き続き obj det と occ の結果を表示できます。しかし、エンドツーエンドの規制は必ずしも上流の結果を受け入れるわけではなく、近距離での誤検知が必ずしも発進や衝突につながるとは限らず、近距離での誤検知が必ずしも車両の停止につながるとは限りません。全ての結果はPNCに入力され、総合的に判断されます。これは確かに興味深い点です。確かなことは、マスク氏が嘘をついていないということです。これはまさにエンドツーエンド システムのパフォーマンスです。
以上が見事な! ! ! Tesla のエンドツーエンドのデモビデオ分析の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7456
7456
 15
1376
52
77
11
17
10
15
1376
52
77
11
17
10

 自動運転シナリオにおけるロングテール問題を解決するにはどうすればよいでしょうか?
Jun 02, 2024 pm 02:44 PM
自動運転シナリオにおけるロングテール問題を解決するにはどうすればよいでしょうか?
Jun 02, 2024 pm 02:44 PM
昨日の面接で、ロングテール関連の質問をしたかと聞かれたので、簡単にまとめてみようと思いました。自動運転のロングテール問題とは、自動運転車におけるエッジケース、つまり発生確率が低い考えられるシナリオを指します。認識されているロングテール問題は、現在、単一車両のインテリジェント自動運転車の運用設計領域を制限している主な理由の 1 つです。自動運転の基礎となるアーキテクチャとほとんどの技術的問題は解決されており、残りの 5% のロングテール問題が徐々に自動運転の開発を制限する鍵となってきています。これらの問題には、さまざまな断片的なシナリオ、極端な状況、予測不可能な人間の行動が含まれます。自動運転におけるエッジ シナリオの「ロング テール」とは、自動運転車 (AV) におけるエッジ ケースを指します。エッジ ケースは、発生確率が低い可能性のあるシナリオです。これらの珍しい出来事
 nuScenes の最新 SOTA | SparseAD: スパース クエリは効率的なエンドツーエンドの自動運転に役立ちます。
Apr 17, 2024 pm 06:22 PM
nuScenes の最新 SOTA | SparseAD: スパース クエリは効率的なエンドツーエンドの自動運転に役立ちます。
Apr 17, 2024 pm 06:22 PM
先頭と開始点に書かれている エンドツーエンドのパラダイムでは、統一されたフレームワークを使用して自動運転システムのマルチタスクを実現します。このパラダイムの単純さと明確さにも関わらず、サブタスクにおけるエンドツーエンドの自動運転手法のパフォーマンスは、依然としてシングルタスク手法に比べてはるかに遅れています。同時に、以前のエンドツーエンド手法で広く使用されていた高密度鳥瞰図 (BEV) 機能により、より多くのモダリティやタスクに拡張することが困難になります。ここでは、スパース検索中心のエンドツーエンド自動運転パラダイム (SparseAD) が提案されています。このパラダイムでは、スパース検索は、高密度の BEV 表現を使用せずに、空間、時間、タスクを含む運転シナリオ全体を完全に表します。具体的には、統合されたスパース アーキテクチャが、検出、追跡、オンライン マッピングなどのタスク認識のために設計されています。さらに、重い
 エンドツーエンドおよび次世代の自動運転システムと、エンドツーエンドの自動運転に関する誤解について話しましょう。
Apr 15, 2024 pm 04:13 PM
エンドツーエンドおよび次世代の自動運転システムと、エンドツーエンドの自動運転に関する誤解について話しましょう。
Apr 15, 2024 pm 04:13 PM
この 1 か月間、いくつかのよく知られた理由により、私は業界のさまざまな教師やクラスメートと非常に集中的な交流をしてきました。この交換で避けられない話題は当然、エンドツーエンドと人気の Tesla FSDV12 です。この機会に、現時点での私の考えや意見を整理し、皆様のご参考とご議論に役立てたいと思います。エンドツーエンドの自動運転システムをどのように定義するか、またエンドツーエンドで解決することが期待される問題は何でしょうか?最も伝統的な定義によれば、エンドツーエンド システムとは、センサーから生の情報を入力し、関心のある変数をタスクに直接出力するシステムを指します。たとえば、画像認識では、従来の特徴抽出 + 分類子方式と比較して、CNN はエンドツーエンドと言えます。自動運転タスクでは、各種センサー(カメラ/LiDAR)からのデータを入力
 FisheyeDetNet: 魚眼カメラに基づいた最初のターゲット検出アルゴリズム
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: 魚眼カメラに基づいた最初のターゲット検出アルゴリズム
Apr 26, 2024 am 11:37 AM
目標検出は自動運転システムにおいて比較的成熟した問題であり、その中でも歩行者検出は最も初期に導入されたアルゴリズムの 1 つです。ほとんどの論文では非常に包括的な研究が行われています。ただし、サラウンドビューに魚眼カメラを使用した距離認識については、あまり研究されていません。放射状の歪みが大きいため、標準のバウンディング ボックス表現を魚眼カメラに実装するのは困難です。上記の説明を軽減するために、拡張バウンディング ボックス、楕円、および一般的な多角形の設計を極/角度表現に探索し、これらの表現を分析するためのインスタンス セグメンテーション mIOU メトリックを定義します。提案された多角形モデルの FisheyeDetNet は、他のモデルよりも優れたパフォーマンスを示し、同時に自動運転用の Valeo 魚眼カメラ データセットで 49.5% の mAP を達成しました。
 Tesla Dojo のスーパーコンピューティング デビュー、マスク氏: 年末までに AI をトレーニングするためのコンピューティング能力は、NVIDIA H100 GPU 8,000 個とほぼ同等になるでしょう
Jul 24, 2024 am 10:38 AM
Tesla Dojo のスーパーコンピューティング デビュー、マスク氏: 年末までに AI をトレーニングするためのコンピューティング能力は、NVIDIA H100 GPU 8,000 個とほぼ同等になるでしょう
Jul 24, 2024 am 10:38 AM
7 月 24 日のこの Web サイトのニュースによると、テスラ CEO イーロン マスク (イーロン マスク) は、本日の決算電話会議で、同社が 2,000 台の NVIDIA H100 を搭載するこれまでで最大の人工知能トレーニング クラスターを完成させようとしていると述べました。 GPU。マスク氏はまた、同社の決算会見で投資家に対し、NvidiaのGPUは高価であるため、テスラはDojoスーパーコンピューターの開発に取り組むと語った。このサイトは、マスク氏のスピーチの一部を次のように翻訳しました: Dojo を通じて NVIDIA と競争する道は困難ですが、私たちは今、NVIDIA に過度に依存しています。 NVIDIA の観点からすると、市場が耐えられるレベルまで GPU の価格を引き上げるのは必然ですが、
 量産型キラー! P-Mapnet: 従来の低精度地図 SDMap を使用することで、マッピングのパフォーマンスが 20 ポイント近く大幅に向上しました。
Mar 28, 2024 pm 02:36 PM
量産型キラー! P-Mapnet: 従来の低精度地図 SDMap を使用することで、マッピングのパフォーマンスが 20 ポイント近く大幅に向上しました。
Mar 28, 2024 pm 02:36 PM
上で書いたように、高精度地図への依存を取り除くために現在の自動運転システムで使用されているアルゴリズムの 1 つは、長距離領域での知覚性能が依然として低いという事実を利用するものです。この目的を達成するために、私たちは P-MapNet を提案します。「P」はモデルのパフォーマンスを向上させるためにマップ事前分布を融合することに焦点を当てています。具体的には、SDMap と HDMap の事前情報を活用します。一方で、OpenStreetMap から弱く調整された SDMap データを抽出し、入力をサポートするためにそれを独立した用語にエンコードします。厳密に変更された入力と実際の HD+Map の間には調整が弱いという問題がありますが、クロスアテンション メカニズムに基づく構造は、SDMap スケルトンに適応的に焦点を合わせ、大幅なパフォーマンスの向上をもたらします。
 テスラがついに行動を起こす!自動運転タクシーは間もなく発表されるでしょうか? !
Apr 08, 2024 pm 05:49 PM
テスラがついに行動を起こす!自動運転タクシーは間もなく発表されるでしょうか? !
Apr 08, 2024 pm 05:49 PM
4月8日のニュースによると、テスラのCEOイーロン・マスク氏は最近、テスラが自動運転車技術の開発に取り組んでいることを明らかにし、待望の無人自動運転タクシー「ロボタクシー」が8月8日に正式デビューすると発表した。データ編集者は、マスク氏の発言が次のことであることを知った。以前ロイターは、テスラの自動車運転計画はロボタクシーの生産に焦点を当てていると報じた。しかし、マスク氏はこれに反論し、ロイター通信が低価格車の開発計画を中止し、再び虚偽の報告書を発表したと非難し、一方、低価格車のモデル2とロボタックスの開発は明らかになったと明らかにした。
 自動運転の初の純粋な視覚的静的再構築
Jun 02, 2024 pm 03:24 PM
自動運転の初の純粋な視覚的静的再構築
Jun 02, 2024 pm 03:24 PM
純粋に視覚的な注釈ソリューションでは、主に視覚に加えて、GPS、IMU、および車輪速度センサーからのデータを動的注釈に使用します。もちろん、量産シナリオでは、純粋な視覚である必要はありません。一部の量産車両には固体レーダー (AT128) などのセンサーが搭載されています。大量生産の観点からデータの閉ループを作成し、これらすべてのセンサーを使用すると、動的オブジェクトのラベル付けの問題を効果的に解決できます。しかし、私たちの計画には固体レーダーはありません。したがって、この最も一般的な量産ラベル ソリューションを紹介します。純粋に視覚的な注釈ソリューションの中核は、高精度のポーズ再構築にあります。再構築の精度を確保するために、Structure from Motion (SFM) のポーズ再構築スキームを使用します。でもパスする
