

Vision Pro を使用してロボット犬をリアルタイムで訓練しましょう! MIT 博士課程学生のオープンソース プロジェクトが人気に

Vision Pro にはもう 1 つの注目の新しい遊び方があり、今回は身体化された知性とリンクしています~
このように、MIT 担当者は Vision Pro のハンド トラッキング機能を使用して、次のことを実現しました。ロボット犬のリアルタイム制御。
ドアを開けるなどのアクションを正確に取得できるだけでなく、ほとんどの情報も取得できません。遅れ。

# デモが公開されるとすぐに、ネチズンが Goose Meizi を賞賛しただけでなく、さまざまな具現化知能研究者も興奮しました。
たとえば、清華大学の博士課程の学生: 
大胆に予測する人もいます: これが私たちが次世代のマシンと対話する方法です。
プロジェクトの実装方法については、作者
Park Younghyo (Younghyo Park) が GitHub で  オープンソース
オープンソース
Vision Pro を使用してロボット犬を訓練する
作者が開発したアプリを詳しく見てみましょう--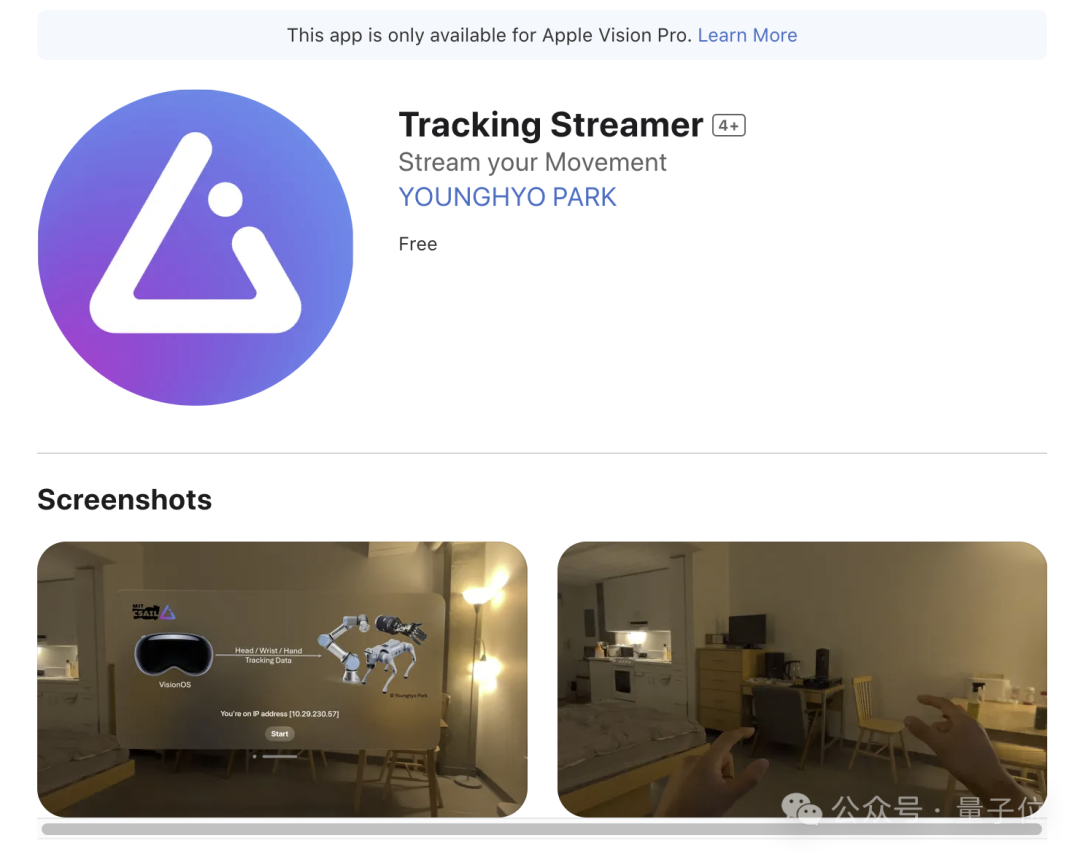 Tracking Steamer
Tracking Steamer
モーション トラッキング部分は主に Apple の ARKit ライブラリに依存しています。
ヘッド トラッキングは queryDeviceAnchor を呼び出します。 Digital Crown を長押しすると、ヘッド フレームを現在の位置にリセットできます。 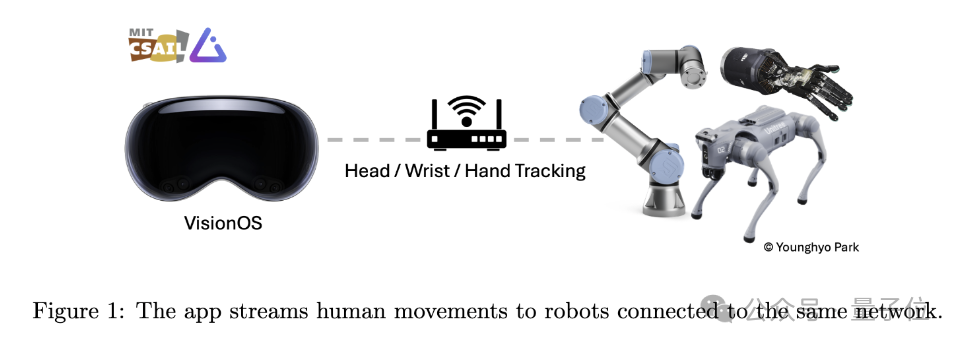
ネットワーク通信に関しては、このアプリはデータをストリーミングするためのネットワーク通信プロトコルとして gRPC を使用します。これにより、Linux、Mac、Windows デバイスなど、より多くのデバイスでデータをサブスクライブできるようになります。
さらに、データ送信を容易にするために、開発者がプログラムで Vision Pro からストリーミングされた追跡データをサブスクライブして受信できるようにする Python API も用意しました。 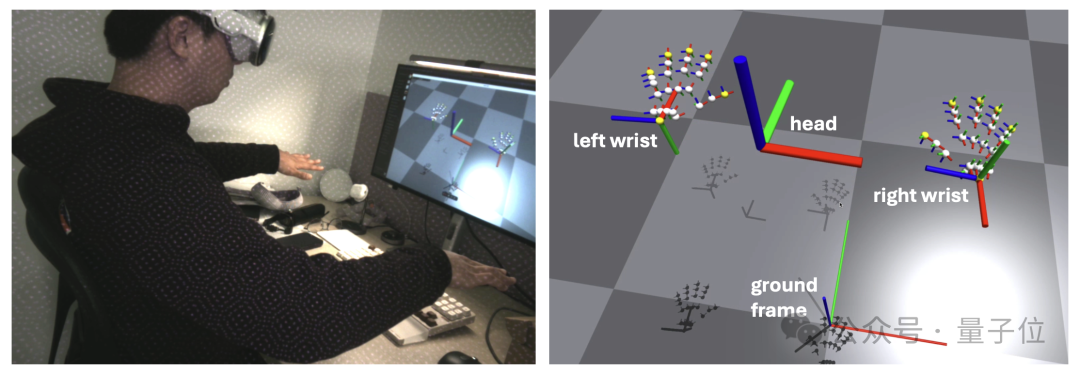
多くの専門家が指摘しているように、ロボット犬の動きが依然として人間によって制御されているかどうかに関係なく、実際には、「制御」自体と比較して、模倣 アルゴリズムを学習する過程では、人間はロボットのコーチに似てきます。
Vision Pro は、ユーザーの動きを追跡することで直感的でシンプルな対話方法を提供し、専門家でなくてもロボットに正確なトレーニング データを提供できるようにします。 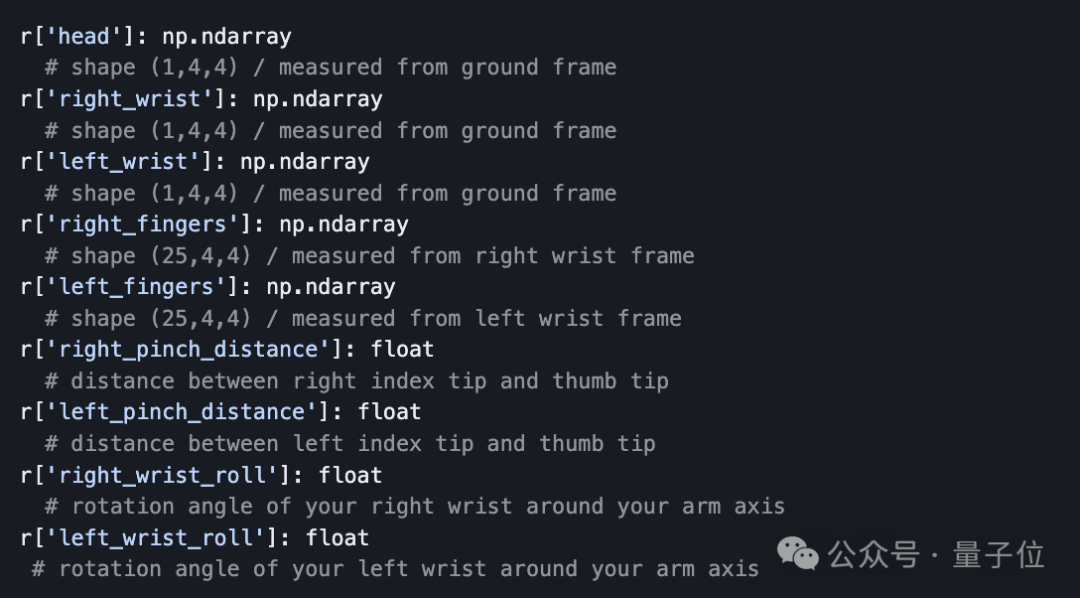
近い将来、人々は眼鏡をかけるのと同じように Vision Pro のようなデバイスを毎日着用するようになるかもしれません。その過程でどれだけのデータが収集されるのでしょうか。
これは、ロボットが人間と現実世界との関わり方を学習できる有望なデータ源です。
最後に、このオープンソース プロジェクトを試してみたい場合は、Vision Pro に加えて、次の準備も必要です。
## Apple はやはり利益を第一に考えなければならないようです (doge)。
- Apple 開発者アカウント
- Vision Pro 開発者アクセサリ (開発者ストラップ、価格は 299 ドル)
- Xcode がインストールされた Mac コンピュータ
プロジェクト リンク: https://github.com/Improbable-AI/VisionProTeleop?tab=readme-ov-file
# #
以上がVision Pro を使用してロボット犬をリアルタイムで訓練しましょう! MIT 博士課程学生のオープンソース プロジェクトが人気にの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7515
7515
 15
1378
52
79
11
19
64
15
1378
52
79
11
19
64

 オープンソース!ゾーイデプスを超えて! DepthFM: 高速かつ正確な単眼深度推定!
Apr 03, 2024 pm 12:04 PM
オープンソース!ゾーイデプスを超えて! DepthFM: 高速かつ正確な単眼深度推定!
Apr 03, 2024 pm 12:04 PM
0.この記事は何をするのですか?私たちは、多用途かつ高速な最先端の生成単眼深度推定モデルである DepthFM を提案します。従来の深度推定タスクに加えて、DepthFM は深度修復などの下流タスクでも最先端の機能を実証します。 DepthFM は効率的で、いくつかの推論ステップ内で深度マップを合成できます。この作品について一緒に読みましょう〜 1. 論文情報タイトル: DepthFM: FastMonocularDepthEstimationwithFlowMatching 著者: MingGui、JohannesS.Fischer、UlrichPrestel、PingchuanMa、Dmytr
 エンコーダ/デコーダ アーキテクチャを放棄し、より効果的なエッジ検出に拡散モデルを使用する 国立防衛工科大学は DiffusionEdge を提案しました
Feb 07, 2024 pm 10:12 PM
エンコーダ/デコーダ アーキテクチャを放棄し、より効果的なエッジ検出に拡散モデルを使用する 国立防衛工科大学は DiffusionEdge を提案しました
Feb 07, 2024 pm 10:12 PM
現在のディープ エッジ検出ネットワークは通常、エンコーダ/デコーダ アーキテクチャを採用しています。このアーキテクチャには、マルチレベルの特徴をより適切に抽出するためのアップ サンプリング モジュールとダウン サンプリング モジュールが含まれています。ただし、この構造では、ネットワークが正確かつ詳細なエッジ検出結果を出力することが制限されます。この問題に対して、AAAI2024 に関する論文は新しい解決策を提供しています。論文のタイトル: DiffusionEdge:DiffusionProbabilisticModelforCrispEdgeDetection 著者: Ye Yunfan (国立国防技術大学)、Xu Kai (国立国防技術大学)、Huang Yuxing (国立国防技術大学)、Yi Renjiao (国立国防技術大学)、Cai Zhiping (防衛工科大学) 論文リンク:https://ar
 Tongyi Qianwen が再びオープンソースになり、Qwen1.5 では 6 つのボリューム モデルが提供され、そのパフォーマンスは GPT3.5 を超えます
Feb 07, 2024 pm 10:15 PM
Tongyi Qianwen が再びオープンソースになり、Qwen1.5 では 6 つのボリューム モデルが提供され、そのパフォーマンスは GPT3.5 を超えます
Feb 07, 2024 pm 10:15 PM
春節に合わせて、Tongyi Qianwen Model (Qwen) のバージョン 1.5 がオンラインになりました。今朝、新しいバージョンのニュースが AI コミュニティの注目を集めました。大型モデルの新バージョンには、0.5B、1.8B、4B、7B、14B、72Bの6つのモデルサイズが含まれています。その中でも最強バージョンの性能はGPT3.5やMistral-Mediumを上回ります。このバージョンには Base モデルと Chat モデルが含まれており、多言語サポートを提供します。アリババの同義前文チームは、関連技術が同義前文公式ウェブサイトと同義前文アプリでもリリースされたと述べた。さらに、本日の Qwen 1.5 リリースには、32K のコンテキスト長のサポート、Base+Chat モデルのチェックポイントのオープン、および 32K のコンテキスト長のサポートなどのハイライトもあります。
 大規模なモデルもスライスでき、Microsoft SliceGPT により LLAMA-2 の計算効率が大幅に向上します。
Jan 31, 2024 am 11:39 AM
大規模なモデルもスライスでき、Microsoft SliceGPT により LLAMA-2 の計算効率が大幅に向上します。
Jan 31, 2024 am 11:39 AM
大規模言語モデル (LLM) には通常、数十億のパラメーターがあり、数兆のトークンでトレーニングされます。ただし、このようなモデルのトレーニングとデプロイには非常にコストがかかります。計算要件を軽減するために、さまざまなモデル圧縮技術がよく使用されます。これらのモデル圧縮技術は一般に、蒸留、テンソル分解 (低ランク因数分解を含む)、枝刈り、および量子化の 4 つのカテゴリに分類できます。プルーニング手法は以前から存在していましたが、多くはパフォーマンスを維持するためにプルーニング後にリカバリ微調整 (RFT) を必要とするため、プロセス全体のコストが高くつき、拡張が困難になります。チューリッヒ工科大学とマイクロソフトの研究者は、この問題に対する SliceGPT と呼ばれる解決策を提案しました。この方法の中心となるアイデアは、重み行列の行と列を削除することでネットワークの埋め込みを減らすことです。
 こんにちは、電気アトラスです!ボストン・ダイナミクスのロボットが復活、180度の奇妙な動きにマスク氏も恐怖
Apr 18, 2024 pm 07:58 PM
こんにちは、電気アトラスです!ボストン・ダイナミクスのロボットが復活、180度の奇妙な動きにマスク氏も恐怖
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas は正式に電動ロボットの時代に突入します!昨日、油圧式アトラスが歴史の舞台から「涙ながらに」撤退したばかりですが、今日、ボストン・ダイナミクスは電動式アトラスが稼働することを発表しました。ボストン・ダイナミクス社は商用人型ロボットの分野でテスラ社と競争する決意を持っているようだ。新しいビデオが公開されてから、わずか 10 時間ですでに 100 万人以上が視聴しました。古い人が去り、新しい役割が現れるのは歴史的な必然です。今年が人型ロボットの爆発的な年であることは間違いありません。ネットユーザーは「ロボットの進歩により、今年の開会式は人間のように見え、人間よりもはるかに自由度が高い。しかし、これは本当にホラー映画ではないのか?」とコメントした。ビデオの冒頭では、アトラスは仰向けに見えるように地面に静かに横たわっています。次に続くのは驚くべきことです
 更新された Point Transformer: より効率的、高速、そして強力になりました。
Jan 17, 2024 am 08:27 AM
更新された Point Transformer: より効率的、高速、そして強力になりました。
Jan 17, 2024 am 08:27 AM
原題: PointTransformerV3: Simpler, Faster, Stronger 論文リンク: https://arxiv.org/pdf/2312.10035.pdf コードリンク: https://github.com/Pointcept/PointTransformerV3 著者単位: HKUSHAILabMPIPKUMIT 論文アイデア: この記事は「注目メカニズム内のイノベーションを求めて」で公開することを目的としたものではありません。代わりに、スケールの力を活用して、点群処理のコンテキストにおける精度と効率の間の既存のトレードオフを克服することに焦点を当てています。 3D 大規模表現学習の最近の進歩からインスピレーションを得て、
 Kuaishou バージョンの Sora「Ke Ling」がテスト用に公開されています。120 秒以上のビデオを生成し、物理学をより深く理解し、複雑な動きを正確にモデル化できます。
Jun 11, 2024 am 09:51 AM
Kuaishou バージョンの Sora「Ke Ling」がテスト用に公開されています。120 秒以上のビデオを生成し、物理学をより深く理解し、複雑な動きを正確にモデル化できます。
Jun 11, 2024 am 09:51 AM
何?ズートピアは国産AIによって実現するのか?ビデオとともに公開されたのは、「Keling」と呼ばれる新しい大規模な国産ビデオ生成モデルです。 Sora も同様の技術的ルートを使用し、自社開発の技術革新を多数組み合わせて、大きく合理的な動きをするだけでなく、物理世界の特性をシミュレートし、強力な概念的結合能力と想像力を備えたビデオを制作します。データによると、Keling は、最大 1080p の解像度で 30fps で最大 2 分の超長時間ビデオの生成をサポートし、複数のアスペクト比をサポートします。もう 1 つの重要な点は、Keling は研究所が公開したデモやビデオ結果のデモンストレーションではなく、ショートビデオ分野のリーダーである Kuaishou が立ち上げた製品レベルのアプリケーションであるということです。さらに、主な焦点は実用的であり、白紙小切手を書かず、リリースされたらすぐにオンラインに移行することです。Ke Ling の大型モデルは Kuaiying でリリースされました。
 超知性の生命力が覚醒する!しかし、自己更新 AI の登場により、母親はデータのボトルネックを心配する必要がなくなりました。
Apr 29, 2024 pm 06:55 PM
超知性の生命力が覚醒する!しかし、自己更新 AI の登場により、母親はデータのボトルネックを心配する必要がなくなりました。
Apr 29, 2024 pm 06:55 PM
世界は狂ったように大きなモデルを構築していますが、インターネット上のデータだけではまったく不十分です。このトレーニング モデルは「ハンガー ゲーム」のようであり、世界中の AI 研究者は、データを貪欲に食べる人たちにどのように餌を与えるかを心配しています。この問題は、マルチモーダル タスクで特に顕著です。何もできなかった当時、中国人民大学学部のスタートアップチームは、独自の新しいモデルを使用して、中国で初めて「モデル生成データフィード自体」を実現しました。さらに、これは理解側と生成側の 2 つの側面からのアプローチであり、両方の側で高品質のマルチモーダルな新しいデータを生成し、モデル自体にデータのフィードバックを提供できます。モデルとは何ですか? Awaker 1.0 は、中関村フォーラムに登場したばかりの大型マルチモーダル モデルです。チームは誰ですか?ソフォンエンジン。人民大学ヒルハウス人工知能大学院の博士課程学生、ガオ・イージャオ氏によって設立されました。
