

LimSim++: 自動運転におけるマルチモーダル大型モデルの新たな段階

論文名: LimSim: A Closed-Loop Platform for Deploying Multimodal LLMs in Autonomous Driving
プロジェクトのホームページ: https://pjlab-adg.github.io/ limsim_plus/

シミュレーターの紹介
フィールドでのマルチモーダル大規模言語モデル ((M)LLM) の使用人工知能の研究ブームを引き起こし、自動運転技術への応用が徐々に注目を集めるようになりました。これらのモデルは、強力な一般化された理解と論理的推論機能を通じて、安全で信頼性の高い自動運転システムの構築を強力にサポートします。自動運転における LLM のパフォーマンスを検証できる、HighwayEnv、CARLA、NuPlan などの既存の閉ループ シミュレーション プラットフォームがありますが、通常、ユーザーはこれらのプラットフォームを自分で適応させる必要があるため、使用の敷居が高くなるだけでなく、制限も発生します。 LLM 機能の詳細な調査。
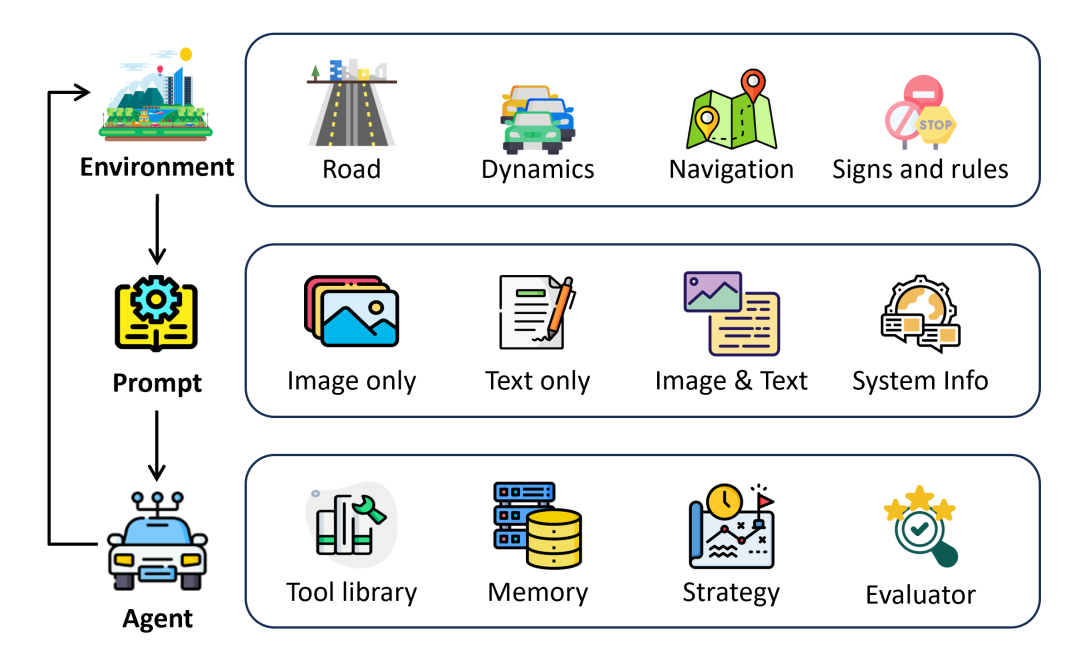
この課題を克服するために、上海人工知能研究所の高度交通プラットフォーム グループは、(M)LLM 用に特別に設計された自動運転閉ループ シミュレーション プラットフォームである **LimSim** を立ち上げました。 LimSim の立ち上げは、自動運転分野の研究者に、自動運転技術における LLM の可能性を包括的に探求するためのより適切な環境を提供することを目的としています。このプラットフォームは、SUMO や CARLA などのシミュレーション環境からシーン情報を抽出して処理し、画像情報、シーン認識、タスクの説明など、LLM に必要なさまざまな入力形式に変換できます。さらに、LimSim にはモーション プリミティブ変換機能もあり、LLM の決定に基づいて適切な運転軌道を迅速に生成し、閉ループ シミュレーションを実現できます。さらに重要なことは、LimSim は LLM の継続的な学習環境を作成し、LLM が継続的に運転戦略を最適化し、意思決定結果を評価してフィードバックを提供することでドライバー エージェントの運転パフォーマンスを向上させるのに役立ちます。
シミュレータの機能
LimSim は自動運転シミュレーションの分野で重要な機能を備えており、(M)LLM によって駆動されるドライバー エージェントを提供します理想的な閉ループ シミュレーションと継続的な学習環境。
- LimSim は、交差点、ランプ、ロータリーなどのさまざまな運転シナリオのシミュレーションをサポートし、ドライバー エージェントがさまざまな複雑な道路状況での課題を確実に受け入れることができるようにします。この多様なシーン設定により、LLM はより豊かな運転経験を得ることができ、実際の環境での適応性が向上します。
- LimSim は、複数のモーダル入力を持つ大規模な言語モデルをサポートします。 LimSim は、ルールベースのシーン情報生成を提供するだけでなく、CARLA と共同でデバッグして、自動運転における (M)LLM の視覚認識ニーズを満たす豊富な視覚入力を提供することもできます。
- LimSim は継続的な学習機能に重点を置いています。 LimSim は、評価、反映、メモリなどのモジュールを統合し、(M)LLM が継続的に経験を蓄積し、シミュレーション プロセス中の意思決定戦略を最適化できるようにします。
独自のドライバー エージェントの作成
LimSim は、ドライバー エージェントのニーズを満たす豊富なインターフェイスをユーザーに提供します。カスタマイズ要件により、LimSim 開発の柔軟性が向上し、使用の敷居が低くなります。
- プロンプト ビルド
- LimSim は、(M)LLM に入力されたテキスト情報 (ロール情報を含む) を変更するためのユーザー定義プロンプトをサポートしています。設定、タスク要件、シーンの説明など。
- LimSim は、json 形式に基づいたシーン記述テンプレートを提供するため、ユーザーは情報抽出の具体的な実装を考慮することなく、ゼロコードでプロンプトを変更できます。
- 意思決定評価モジュール
- LimSim は、(M)LLM 意思決定結果を評価するためのベースラインを提供します。ユーザーは評価を調整できます重みパラメータを変更することで設定を変更できます。
- フレームワークの柔軟性
- LimSim は、ユーザーが (M)LLM 用にカスタマイズされたツール ライブラリを追加できるようにサポートします。知覚ツール、数値処理ツールなど。
すぐに始めましょう
- ステップ 0:SUMO をインストールします (バージョン ≥v1.15.0、ubuntu)
sudo add-apt-repository ppa:sumo/stablesudo apt-get updatesudo apt-get install sumo sumo-tools sumo-doc
- #ステップ 1: LimSim ソース コード圧縮パッケージをダウンロードし、解凍して、正しいブランチに切り替えます
git clone https://github.com/PJLab-ADG/LimSim.gitgit checkout -b LimSim_plus
- ステップ 2:依存関係をインストールする (conda が必要です)
cd LimSimconda env create -f environment.yml
- ステップ3: シミュレーションの実行
- シミュレーションを単独で実行
python ExampleModel.py
- LLM を使用して自動運転
export OPENAI_API_KEY='your openai key'python ExampleLLMAgentCloseLoop.py
- 自動運転に VLM を使用する
# Terminal 1cd path-to-carla/./CarlaUE4.sh# Termnial 2cd path-to-carla/cd PythonAPI/util/python3 config.py --map Town06# Termnial 2export OPENAI_API_KEY='your openai key'cd path-to-LimSim++/python ExampleVLMAgentCloseLoop.py
詳細については、LimSim の github を確認してください。 : https:// github.com/PJLab-ADG/LimSim/tree/LimSim_plus. 他にご質問がある場合は、GitHub の Issues で提起するか、電子メールで直接お問い合わせください。
LimSim を共同開発し、オープンソース エコシステムを構築するために、学界と産業界のパートナーを歓迎します。
以上がLimSim++: 自動運転におけるマルチモーダル大型モデルの新たな段階の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7555
7555
 15
1382
52
83
11
28
96
15
1382
52
83
11
28
96

 Windows 11 のスマート アプリ コントロール: オンまたはオフにする方法
Jun 06, 2023 pm 11:10 PM
Windows 11 のスマート アプリ コントロール: オンまたはオフにする方法
Jun 06, 2023 pm 11:10 PM
インテリジェント アプリ コントロールは、ランサムウェアやスパイウェアなど、データに損害を与える可能性のある不正なアプリから PC を保護する Windows 11 の非常に便利なツールです。この記事では、スマート アプリ コントロールとは何か、その仕組み、および Windows 11 でスマート アプリ コントロールをオンまたはオフにする方法について説明します。 Windows 11 のスマート アプリ コントロールとは何ですか? Smart App Control (SAC) は、Windows 1122H2 更新プログラムで導入された新しいセキュリティ機能です。 Microsoft Defender またはサードパーティのウイルス対策ソフトウェアと連携して、デバイスの速度を低下させたり、予期しない広告を表示したり、その他の予期しないアクションを実行したりする可能性のある不要なアプリをブロックします。スマートなアプリケーション
 飛び回ったり、口を開けたり、見つめたり、眉毛を上げたりする顔の特徴をAIが完璧に模倣し、ビデオ詐欺を防ぐことは不可能
Dec 14, 2023 pm 11:30 PM
飛び回ったり、口を開けたり、見つめたり、眉毛を上げたりする顔の特徴をAIが完璧に模倣し、ビデオ詐欺を防ぐことは不可能
Dec 14, 2023 pm 11:30 PM
これほど強力なAIの模倣能力では、それを防ぐことは本当に不可能です。 AIの発展は今ここまで進んでいるのか?前足で顔の特徴を浮き上がらせ、後ろ足で全く同じ表情を再現し、見つめたり、眉を上げたり、口をとがらせたり、どんなに大袈裟な表情でも完璧に真似しています。難易度を上げて、眉毛を高く上げ、目を大きく開き、口の形も歪んでいるなど、バーチャルキャラクターアバターで表情を完璧に再現できます。左側のパラメータを調整すると、右側の仮想アバターもそれに合わせて動きが変化し、口や目の部分がアップになります。同じです(右端)。この研究は、GaussianAvatars を提案するミュンヘン工科大学などの機関によるものです。
 MotionLM: マルチエージェント動作予測のための言語モデリング技術
Oct 13, 2023 pm 12:09 PM
MotionLM: マルチエージェント動作予測のための言語モデリング技術
Oct 13, 2023 pm 12:09 PM
この記事は自動運転ハート公式アカウントより許可を得て転載しておりますので、転載については出典元までご連絡ください。原題: MotionLM: Multi-Agent Motion Forecasting as Language Modeling 論文リンク: https://arxiv.org/pdf/2309.16534.pdf 著者の所属: Waymo 会議: ICCV2023 論文のアイデア: 自動運転車の安全計画のために、将来の動作を確実に予測するロードエージェントの数は非常に重要です。この研究では、連続的な軌跡を離散的なモーション トークンのシーケンスとして表現し、マルチエージェントのモーション予測を言語モデリング タスクとして扱います。私たちが提案するモデル MotionLM には次の利点があります。
 数年後にはプログラマーが減少するということをご存知ですか?
Nov 08, 2023 am 11:17 AM
数年後にはプログラマーが減少するということをご存知ですか?
Nov 08, 2023 am 11:17 AM
「ComputerWorld」誌はかつて、IBM がエンジニアが必要な数式を書いて提出できる新しい言語 FORTRAN を開発したため、「プログラミングは 1960 年までに消滅するだろう」という記事を書きました。コンピューターを実行すればプログラミングは終了します。画像 数年後、私たちは新しいことわざを聞きました: ビジネスマンは誰でもビジネス用語を使って問題を説明し、コンピュータに何をすべきかを伝えることができます。COBOL と呼ばれるこのプログラミング言語を使用することで、企業はもはやプログラマーを必要としません。その後、IBM は従業員がフォームに記入してレポートを作成できるようにする RPG と呼ばれる新しいプログラミング言語を開発したと言われており、会社のプログラミング ニーズのほとんどはこれで完了できます。
 フーリエ知能万能ヒューマノイドロボット「GR-1」の予約販売が始まります!
Sep 27, 2023 pm 08:41 PM
フーリエ知能万能ヒューマノイドロボット「GR-1」の予約販売が始まります!
Sep 27, 2023 pm 08:41 PM
この人型ロボットは身長 1.65 メートル、体重 55 キログラム、体に 44 の自由度があり、素早く歩き、障害物を素早く回避し、斜面を着実に上り下りし、衝撃干渉に耐えることができます。フーリエインテリジェンスの汎用人型ロボット GR-1 の予約販売が開始されました ロボット講堂 フーリエインテリジェンスの汎用人型ロボット フーリエ GR-1 の予約販売が開始されました。 GR-1 は、高度にバイオニックな体幹構成と擬人化された動作制御を備えており、全身 44 度の自由度を持ち、歩行、障害物を回避、障害物を横切り、坂道を上り下りし、干渉に耐え、さまざまな道路に適応する能力を備えています。一般的な人工知能システムであり、理想的なキャリアです。公式ウェブサイトの先行販売ページ: www.fftai.cn/order#FourierGR-1# フーリエ知能を書き直す必要があります。
 ファーウェイは、心拍数に基づいてユーザーの感情状態を評価できるスマートウェアラブル分野でXuanjiセンシングシステムを発売する
Aug 29, 2024 pm 03:30 PM
ファーウェイは、心拍数に基づいてユーザーの感情状態を評価できるスマートウェアラブル分野でXuanjiセンシングシステムを発売する
Aug 29, 2024 pm 03:30 PM
最近、ファーウェイは、Xuanjiセンシングシステムを搭載した新しいスマートウェアラブル製品を9月に発売すると発表しました。これはファーウェイの最新スマートウォッチとなる予定です。この新製品は、高度な感情的健康モニタリング機能を統合し、正確性、包括性、スピード、柔軟性、オープン性、拡張性という 6 つの特徴を備えた包括的な健康評価をユーザーに提供します。このシステムはスーパーセンシングモジュールを使用し、マルチチャンネル光路アーキテクチャ技術を最適化することで、心拍数、血中酸素、呼吸数などの基本的な指標の監視精度を大幅に向上させます。さらに、Xuanji センシング システムは、心拍数データに基づく感情状態の研究も拡張しており、生理学的指標に限定されず、ユーザーの感情状態やストレス レベルを評価することもでき、60 以上のスポーツのモニタリングをサポートしています。健康指標、心臓血管、呼吸器、神経、内分泌、
 歩行者軌跡予測に有効な手法と一般的なBase手法は何ですか?トップカンファレンスの論文を共有!
Oct 17, 2023 am 11:13 AM
歩行者軌跡予測に有効な手法と一般的なBase手法は何ですか?トップカンファレンスの論文を共有!
Oct 17, 2023 am 11:13 AM
軌道予測はここ 2 年間で注目を集めていますが、そのほとんどは車両の軌道予測の方向に焦点を当てています。本日、自動運転ハートは、歩行者軌道予測のアルゴリズムを NeurIPS - SHENet で共有します。制限されたシーンでは、人間の行動パターンは通常、ある程度、限られたルールに従っています。この仮定に基づいて、SHENet は暗黙のシーン ルールを学習することで人の将来の軌道を予測します。この記事は自動運転ハート様よりオリジナル記事として認定されました!著者の個人的な理解では、人間の動きにはランダム性と主観性があるため、現時点では人の将来の軌道を予測することは依然として困難な問題です。ただし、制約のあるシーンでの人間の動きのパターンは、シーンの制約 (フロア プラン、道路、障害物など) や人間対人間、または人間対オブジェクトの対話性によって異なることがよくあります。
 スマート カー スケートボード シャーシを 1 つの記事で読む
May 24, 2023 pm 12:01 PM
スマート カー スケートボード シャーシを 1 つの記事で読む
May 24, 2023 pm 12:01 PM
01 スケートボードシャーシとは いわゆるスケートボードシャーシは、バッテリー、電装系、サスペンション、ブレーキ等をシャーシ上に予め一体化し、ボディとシャーシの分離・デカップリング設計を実現したものです。このタイプのプラットフォームに基づいて、自動車会社は初期の研究開発とテストのコストを大幅に削減しながら、さまざまなモデルを作成する市場の需要に迅速に対応できます。特に無人運転時代においては、クルマのレイアウトは走行中心ではなく空間性を重視したものとなり、スケートボード型シャシーはアッパーキャビンの開発可能性をさらに広げることができる。もちろん、上の写真のように、スケートボードのシャーシを見たときに、「ああ、耐荷重のないボディだ」という第一印象に囚われてはいけません。当時は電気自動車がなかったため、数百キログラムのバッテリーパックも、ステアリングコラムを不要にするステアリングバイワイヤーシステムも、ブレーキバイワイヤーシステムもありませんでした。
