

カメラとライダーはどのように調整されますか?業界のすべての主流の校正ツールの概要

カメラやライダーのキャリブレーションは多くの作業において重要な基礎作業であり、キャリブレーションの精度はその後のソリューションフュージョンの効果の上限に直接影響します。多くの自動運転およびロボット企業は、キャリブレーションの精度を継続的に向上させるために多くの人的資源と物的リソースを投資しています。今日は、一般的なカメラとライダーのキャリブレーション ツールボックスをいくつか紹介します。これらを収集することをお勧めします。
1.Libcbdetect
ワンショットでの複数のチェッカーボード検出: https://www.cvlibs.net/software/libcbdetect/
MATLAB を使用します。このアルゴリズムは、角の点を自動的に抽出し、サブピクセルの精度で長方形の市松模様のようなパターンに結合するように作成されました。このアルゴリズムには、さまざまな種類の画像 (ピンホール カメラ、魚眼カメラ、パノラマ カメラなど) を処理する機能があります。

2.Autoware キャリブレーション パッケージ
Autoware フレームワーク LIDAR カメラ キャリブレーション ツール キット。
リンク: https://github.com/autowarefoundation/autoware_ai_utilities/tree/master/autoware_camera_lidar_calibrator
#3. 3D-3D マッチングに基づくターゲット キャリブレーション
3D-3D 点対応に基づく LiDAR カメラ キャリブレーション、ROS パッケージ、論文「3D-3D 点対応を使用した LiDAR-カメラ キャリブレーション」より!
リンク: https://github.com/ankitdhall/lidar_camera_calibration
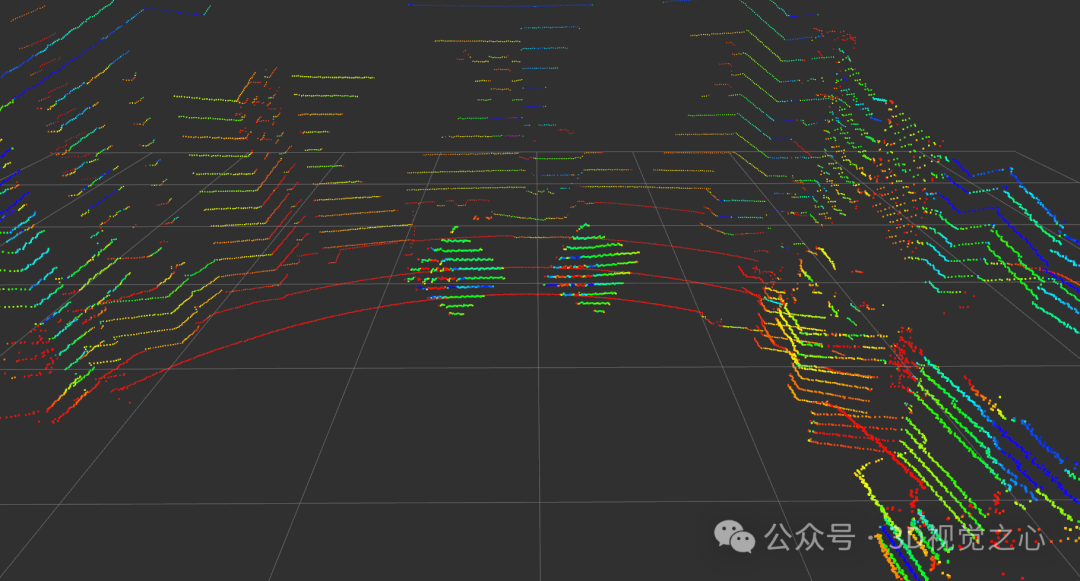
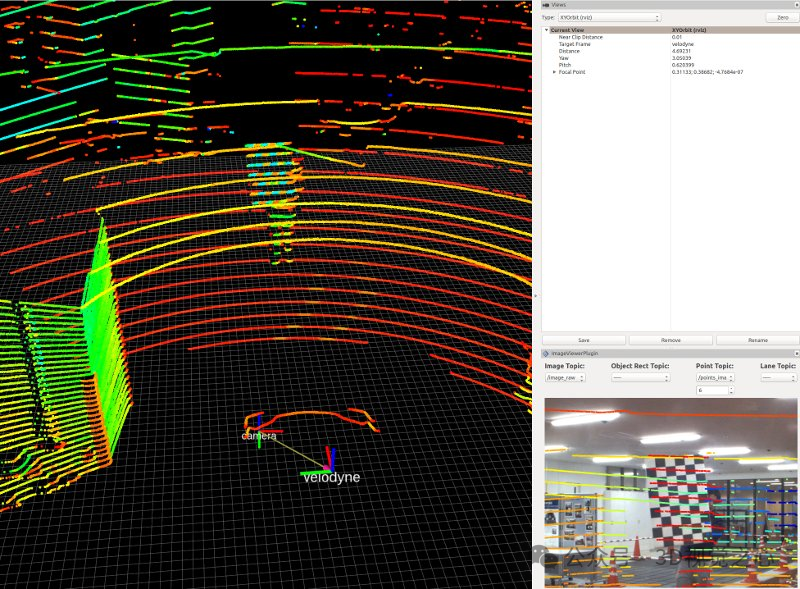
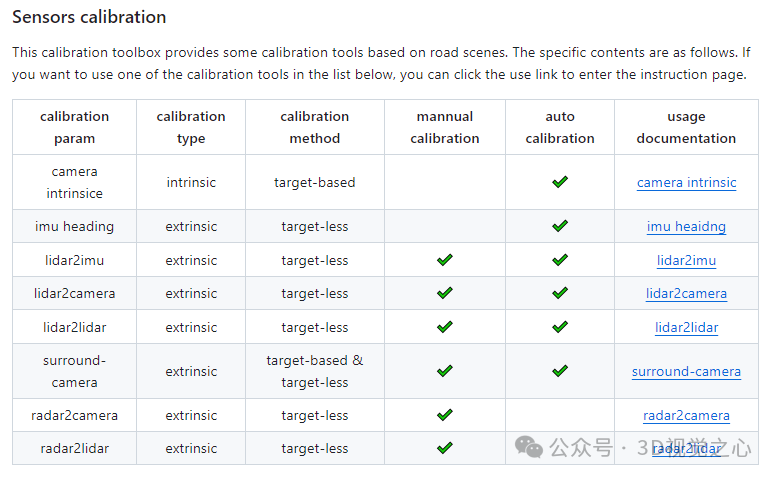
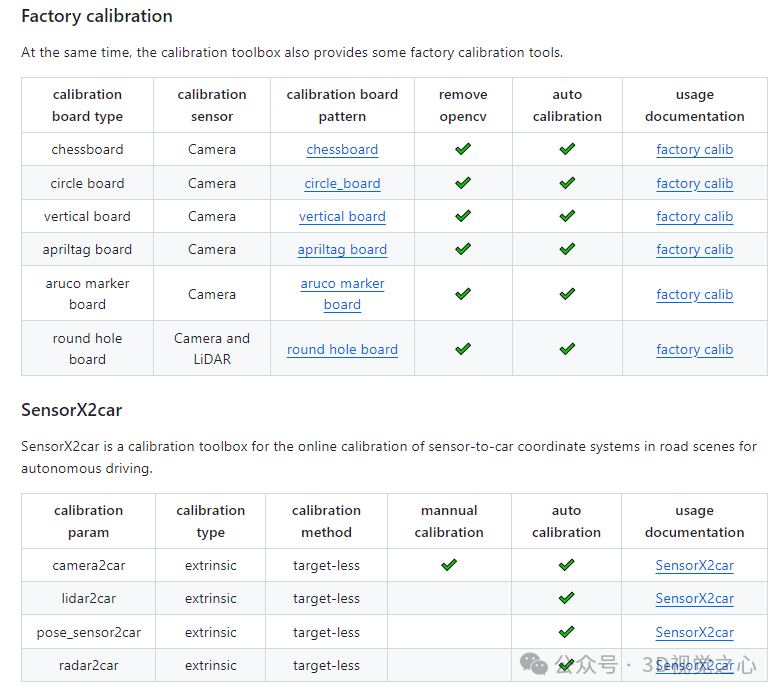
4.上海 AI ラボ OpenCalib
上海人工知能研究所が開発した OpenCalib は、センサー キャリブレーション ツールボックスを提供します。このツールボックスは、IMU、LIDAR、カメラ、レーダーなどのセンサーの校正に使用できます。
リンク: https://github.com/PJLab-ADG/SensorsCalibration
##5. Apolloキャリブレーション ツール
Apollo キャリブレーション ツールボックス、リンク: https://github.com/ApolloAuto/apollo/tree/master/modules/calibration6.Livox -cameraキャリブレーション ツール
このソリューションは、Livox レーダーとカメラの間の外部パラメータを手動でキャリブレーションする方法を提供し、Mid-40、Horizon、および Tele-15 で検証されています。これには、カメラの内部パラメータの計算、校正データの取得、外部パラメータの計算の最適化、およびレーダー カメラ フュージョン アプリケーションに関連するコードが含まれています。このソリューションでは、校正プレートの隅の点が校正ターゲットとして使用され、Livox レーダーの非反復走査特性により、点群の密度が比較的高く、正確な位置を見つけることが容易になります。レーダー点群のコーナーポイント。カメラレーダーのキャリブレーションと融合も良い結果をもたらす可能性があります。 リンク: https://github.com/Livox-SDK/livox_camera_lidar_calibration中国語ドキュメント: https://github.com/Livox-SDK/livox_camera_lidar_calibration/blob/master/doc_resources/ README_cn.md
7.CalibrationTools
CalibrationTools は、LIDAR-LIDAR、LIDAR カメラ、その他のセンサー ペア用のキャリブレーション ツールを提供します。これに加えて、次の機能も提供されます。
1) 測位 - バイアス推定ツールは、測位パフォーマンスを向上させるために推測航法 (IMU およびオドメトリ) に使用されるセンサーのパラメーターを推定します。
2) Autoware 制御出力の視覚化および分析ツール;
3) 車両コマンド遅延を修正するためのキャリブレーション ツール;
リンク: https://github.com /tier4 /CalibrationTools
##8.Matlab
Matlab 独自のツールボックスは、LIDAR とカメラのキャリブレーションをサポートしています。リンク:https://ww2.mathworks。 cn/help/lidar/ug/lidar-and-camera-calibration.html
9.ROS キャリブレーション ツール
ROSカメラ LIDAR キャリブレーション パッケージ、リンク: https://github.com/heethesh/lidar_camera_calibration
#10.直接視覚的な LIDAR キャリブレーション
このパッケージは、LIDAR カメラ キャリブレーション用のツールボックスを提供します:ユニバーサル: 回転および非反復スキャン LIDAR、ピンホール、魚眼、全方向投影カメラを含む、さまざまな LIDAR およびカメラ投影モデルを処理できます。 。 ターゲットなし: キャリブレーション ターゲットは必要ありませんが、キャリブレーションに環境構造とテクスチャを使用します。 シングルショット: キャリブレーションには、少なくとも 1 組の LIDAR 点群とカメラ画像が必要です。オプションで、精度を向上させるために複数の LIDAR カメラ データ ペアを使用できます。 自動: キャリブレーション プロセスは自動であり、最初に推測する必要はありません。 正確かつ堅牢: ピクセルレベルの直接 LIDAR カメラ登録アルゴリズムを使用します。これは、エッジベースの間接 LIDAR カメラ登録と比較して、より堅牢で正確です。
リンク: https://github.com/koide3/direct_visual_lidar_calibration11.2D lidar-camera ツールボックス
これは ROS ベースのシングルです-ラインレーザーとカメラの外部パラメータの自動校正コード。キャリブレーション原理は下図に示すとおりで、カメラはQRコードを介してカメラ座標系におけるキャリブレーションプレート平面の平面方程式を推定し、レーザー点群がその平面上に落ちてくるため、点群は外部パラメータに変換されます。カメラ座標系では、構築された点から平面までの距離が誤差として使用され、非線形最小二乗法を使用して解決されます。 リンク: https://github.com/MegviiRobot/CamLaserCalibraTool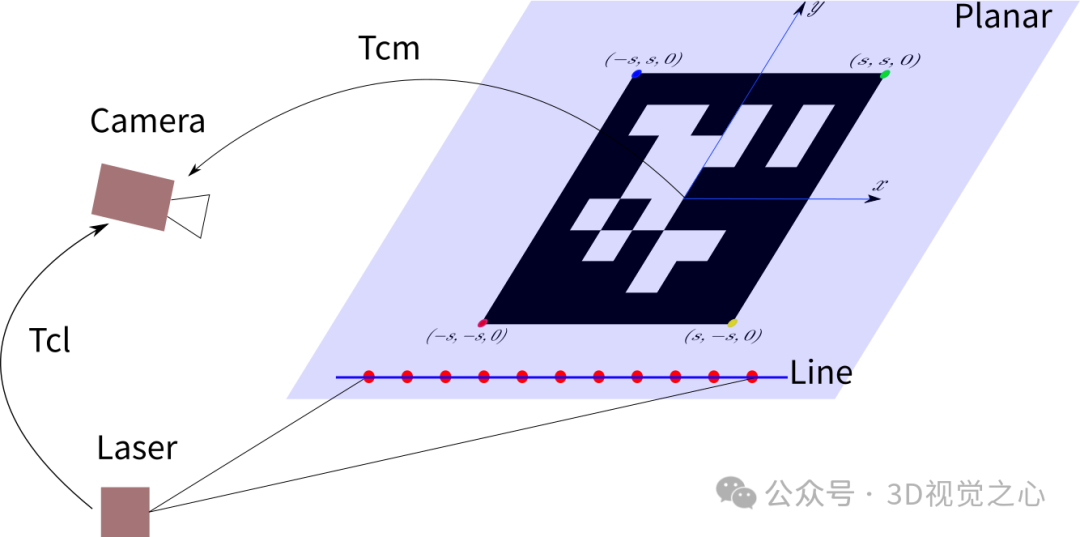
以上がカメラとライダーはどのように調整されますか?業界のすべての主流の校正ツールの概要の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SublimeText3 中国語版
中国語版、とても使いやすい

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ドリームウィーバー CS6
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)
ホットトピック
 7504
7504
 15
1378
52
78
11
19
55
15
1378
52
78
11
19
55

 Debian Readdirのパフォーマンスを最適化する方法
Apr 13, 2025 am 08:48 AM
Debian Readdirのパフォーマンスを最適化する方法
Apr 13, 2025 am 08:48 AM
Debian Systemsでは、Directoryコンテンツを読み取るためにReadDirシステム呼び出しが使用されます。パフォーマンスが良くない場合は、次の最適化戦略を試してください。ディレクトリファイルの数を簡素化します。大きなディレクトリをできる限り複数の小さなディレクトリに分割し、Readdirコールごとに処理されたアイテムの数を減らします。ディレクトリコンテンツのキャッシュを有効にする:キャッシュメカニズムを構築し、定期的にキャッシュを更新するか、ディレクトリコンテンツが変更されたときに、頻繁な呼び出しをreaddirに削減します。メモリキャッシュ(memcachedやredisなど)またはローカルキャッシュ(ファイルやデータベースなど)を考慮することができます。効率的なデータ構造を採用する:ディレクトリトラバーサルを自分で実装する場合、より効率的なデータ構造(線形検索の代わりにハッシュテーブルなど)を選択してディレクトリ情報を保存およびアクセスする
 Debian Readdirが他のツールと統合する方法
Apr 13, 2025 am 09:42 AM
Debian Readdirが他のツールと統合する方法
Apr 13, 2025 am 09:42 AM
DebianシステムのReadDir関数は、ディレクトリコンテンツの読み取りに使用されるシステムコールであり、Cプログラミングでよく使用されます。この記事では、ReadDirを他のツールと統合して機能を強化する方法について説明します。方法1:C言語プログラムを最初にパイプラインと組み合わせて、cプログラムを作成してreaddir関数を呼び出して結果をinclude#include#include inctargc、char*argv []){dir*dir; structdireant*entry; if(argc!= 2){(argc!= 2){
 DebianがHadoopデータ処理速度を改善する方法
Apr 13, 2025 am 11:54 AM
DebianがHadoopデータ処理速度を改善する方法
Apr 13, 2025 am 11:54 AM
この記事では、DebianシステムのHadoopデータ処理効率を改善する方法について説明します。最適化戦略では、ハードウェアのアップグレード、オペレーティングシステムパラメーターの調整、Hadoop構成の変更、および効率的なアルゴリズムとツールの使用をカバーしています。 1.ハードウェアリソースの強化により、すべてのノードが一貫したハードウェア構成、特にCPU、メモリ、ネットワーク機器のパフォーマンスに注意を払うことが保証されます。高性能ハードウェアコンポーネントを選択することは、全体的な処理速度を改善するために不可欠です。 2。オペレーティングシステムチューニングファイル記述子とネットワーク接続:/etc/security/limits.confファイルを変更して、システムによって同時に開くことができるファイル記述子とネットワーク接続の上限を増やします。 JVMパラメーター調整:Hadoop-env.shファイルで調整します
 Nginxログを使用してWebサイトの速度を向上させる方法
Apr 13, 2025 am 09:09 AM
Nginxログを使用してWebサイトの速度を向上させる方法
Apr 13, 2025 am 09:09 AM
Webサイトのパフォーマンスの最適化は、アクセスログの詳細な分析と切り離せません。 Nginx Logは、Webサイトにアクセスしているユーザーの詳細情報を記録します。このデータを巧みに使用すると、Webサイトの速度を効果的に向上させることができます。この記事では、Nginxログに基づいたいくつかのWebサイトのパフォーマンス最適化方法を紹介します。 1。ユーザーの動作分析と最適化。 NGINXログを分析することにより、ユーザーの動作を深く理解し、これに基づいてターゲットを絞った最適化を行うことができます。高周波アクセスIP識別:アクセス周波数の高いIPアドレスを見つけ、特定のコンテンツの帯域幅の増加や応答速度の改善など、これらのIPアドレスのサーバーリソース構成を最適化できます。ステータスコード分析:異なるHTTPステータスコード(404エラーなど)の頻度を分析し、ウェブサイトのナビゲーションやコンテンツ管理の問題を見つけて続行します
 Debian syslogを学ぶ方法
Apr 13, 2025 am 11:51 AM
Debian syslogを学ぶ方法
Apr 13, 2025 am 11:51 AM
このガイドでは、Debian SystemsでSyslogの使用方法を学ぶように導きます。 Syslogは、ロギングシステムとアプリケーションログメッセージのLinuxシステムの重要なサービスです。管理者がシステムアクティビティを監視および分析して、問題を迅速に特定および解決するのに役立ちます。 1. syslogの基本的な知識Syslogのコア関数には以下が含まれます。複数のログ出力形式とターゲットの場所(ファイルやネットワークなど)をサポートします。リアルタイムのログ表示およびフィルタリング機能を提供します。 2。syslog(rsyslogを使用)をインストールして構成するDebianシステムは、デフォルトでrsyslogを使用します。次のコマンドでインストールできます:sudoaptupdatesud
 使用されなくなったパッケージをリサイクルする方法
Apr 13, 2025 am 08:51 AM
使用されなくなったパッケージをリサイクルする方法
Apr 13, 2025 am 08:51 AM
この記事では、役に立たないソフトウェアパッケージをきれいにし、Debianシステムのディスクスペースを解放する方法について説明します。ステップ1:パッケージリストを更新するパッケージリストが最新であることを確認してください:sudoaptupdateステップ2:インストールされたパッケージを表示します。次のコマンドを使用して、すべてのインストールされたパッケージを表示します。適性は、パッケージを安全に削除するのに役立つ提案を提供します:sudoaptitudeSearch '〜pimportant'このコマンドはタグをリストします
 Debian OpenSSLがどのように中間の攻撃を防ぐか
Apr 13, 2025 am 10:30 AM
Debian OpenSSLがどのように中間の攻撃を防ぐか
Apr 13, 2025 am 10:30 AM
Debian Systemsでは、OpenSSLは暗号化、復号化、証明書管理のための重要なライブラリです。中間の攻撃(MITM)を防ぐために、以下の測定値をとることができます。HTTPSを使用する:すべてのネットワーク要求がHTTPの代わりにHTTPSプロトコルを使用していることを確認してください。 HTTPSは、TLS(Transport Layer Security Protocol)を使用して通信データを暗号化し、送信中にデータが盗まれたり改ざんされたりしないようにします。サーバー証明書の確認:クライアントのサーバー証明書を手動で確認して、信頼できることを確認します。サーバーは、urlsessionのデリゲート方法を介して手動で検証できます
 Debian Mail Server SSL証明書のインストール方法
Apr 13, 2025 am 11:39 AM
Debian Mail Server SSL証明書のインストール方法
Apr 13, 2025 am 11:39 AM
Debian Mail ServerにSSL証明書をインストールする手順は次のとおりです。1。最初にOpenSSL Toolkitをインストールすると、OpenSSLツールキットがシステムに既にインストールされていることを確認してください。インストールされていない場合は、次のコマンドを使用してインストールできます。sudoapt-getUpdatesudoapt-getInstalopenssl2。秘密キーと証明書のリクエストを生成次に、OpenSSLを使用して2048ビットRSA秘密キーと証明書リクエスト(CSR)を生成します:Openss
